自适应模糊PID控制器的设计及基于MATLAB的计算机仿真_侯北平
自适应模糊PID控制器的设计及基于MATLAB的计算机仿真
侯北平,卢 佩,付连昆
(天津轻工业学院自动化系,天津300222)
摘 要:将模糊控制器和P ID控制器结合在一起,利用模糊逻辑控制实现了PID控制器参数在线自调整,进一步完善了PID控制器的性能,提高了系统的控制精度。并把M A T L A B中的
F uzzy T oo lbo x和SIM U L IN K有机结合起来,方便的实现了该自适应模糊PID控制系统的
计算机仿真,拓宽了F uzzy T oo lbox和SIM U L IN K的应用范围。
关键词:模糊控制;P ID控制器;M A T L A B;SIM U LI NK;系统仿真
中图分类号:T P273+.4;T P391.9 文献标识码:A 文章编号:1001-456X(2001)04-0032-04
THE DESIGN OF SELF-ADAPTIVE FUZZY PID CONTROLLER
AND ITS COMPUTER SIMULATION BASED ON MATLAB
HOU Bei-ping,LU Pei,FU Lian-kun
(Department of Autom ation Engineering T ianjin Univer sity of Light Industry,
T ianjin300222,China)
Abstract:T he using of F uzzy log ic contr oller makes the paramet er s self-adaption o f PID
contr oller po ssible w hen Fuzzy log ic contr oller and PI D contr oller are co mbined tog ether.It
also per fect s the pro per ties of P ID co nt ro ller and impro ves the pr ecision of co nt ro l system.
T he o rg anic combination of F uzzy T o olbox and SIM U L IN K realized the computer simulatio n
o f this self-adaptive Fuzzy P ID co ntro l system conveniently,and also pro mo tes the applicatio n
o f M A T L A B.
Keywords:F uzzy L og ic contr ol;P ID co nt ro ller;M A T L A B;SIM U L IN K;Sy stem simula tio n
M ATLAB是MathWorks公司1982年推出的一
套高性能的数值计算和可视化软件,到目前它已发展成为国际公认最出色的数学应用软件。其强大的扩展功能为各领域的应用提供了基础。它面向控制领域推出的建模可视化功能SIM ULINK和模糊控制、神经网络、控制系统等工具箱为控制系统的仿真提供了有力的支持,极大的推动了仿真研究的发展。
本文将模糊控制和PID控制结合在一起,根据各自的特点构造了一个自适应模糊PID控制系统,并在M ATLAB中的模糊逻辑工具箱和SIMU LINK基础上,对该控制系统进行了仿真研究。1 控制系统的建模及实现方案
PID控制算法作为一种传统的控制方法以其计算量小、实时性好、易于实现等特点广泛应用于过程控制。当建立起控制对象的精确数学模糊时,只要正确设定参数K p、K I和K D,PID控制器便可实现其作用,但是它存在着参数修改不方便、不能进行自整定等缺点。由于工业对象普遍存在着非线性、时变性等不确定性因素,此时PID控制效果将难以达到预期的目标。而模糊控制不依赖于工业对象模型,它不是用数值变量
天津轻工业学院学报 第4期(总第39期)2001年12月
JOU R NA L O F T IA NJIN U N IV ERSIT Y OF L IGHT I ND U ST RY N o.4Sum392001
收稿日期:2001-04-06
**基金项目:天津市高校科技发展基金资助项目(990202)
**作者简介:侯北平(1976-),男,山东省人,硕士研究生。
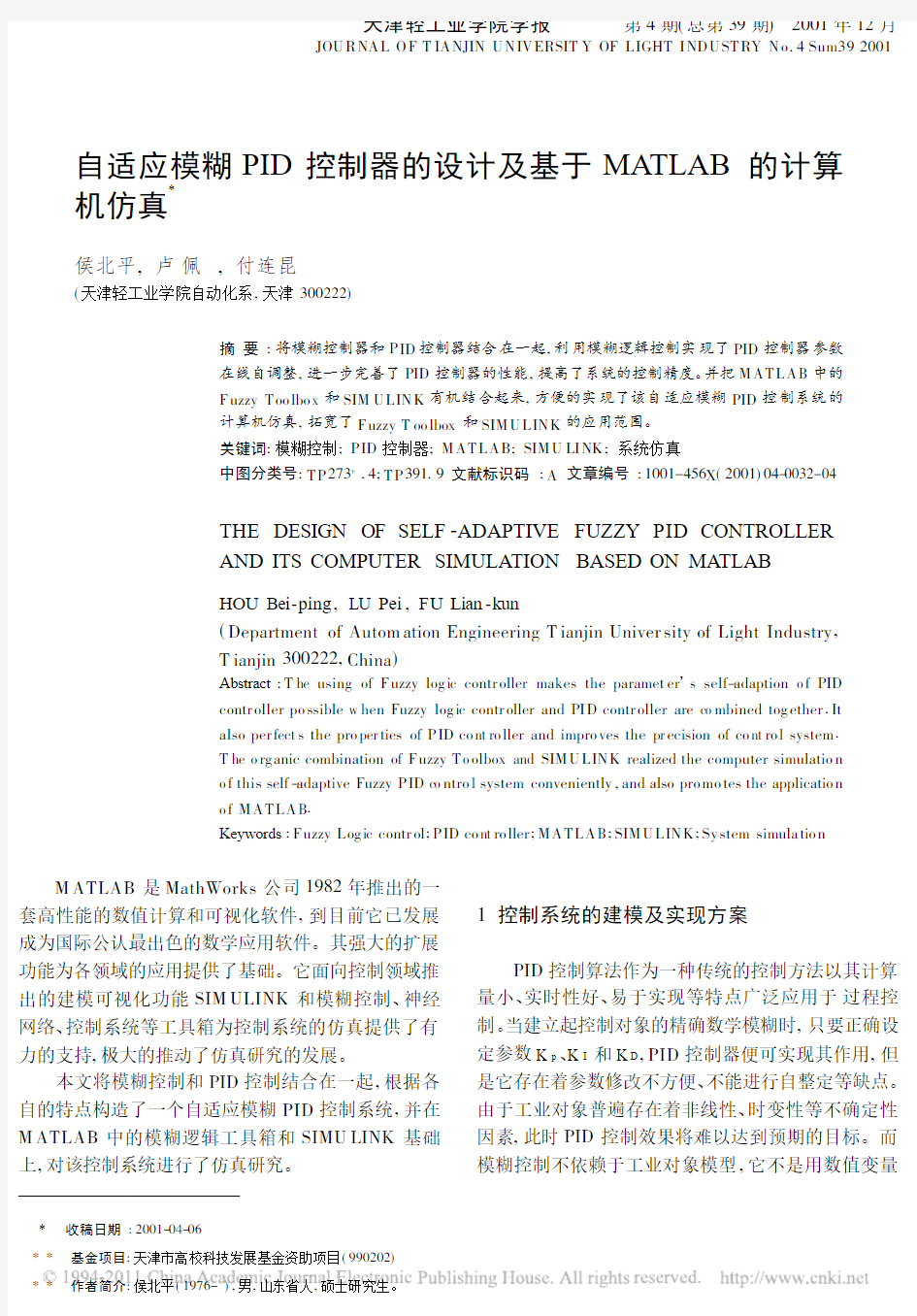
图1 自适应模糊PID 控制系统结构图
而是用语言变量来描述系统特征,并依据系统的动态信息和模糊控制规则进行推理以获得合适的控制量,因而具有较强的鲁棒性,但控制精度却不太理想。 如果能实现PID 控制器的参数在线自调整,那么就地一步完善了PID 控制器的性能,以适应控制系统的参数变化和工作条件变化。研究表明,模糊控制和PID 控制的结合是提高控制性能的有效手段。为提高系统的控制精度和鲁棒性,提出了一种利用模糊逻辑对PID 控制器进行在线自调整的方法。
自适应模糊PID 控制器以误差e 和误差变化率e c 作为输入,可以满足不同时刻偏差e 和偏差变化率e c 对PID 参数自调整的要求,利用模糊控制规则对PID 参数进行修改便构成了自适应模糊PID 系统。如图1所示。
在本系统中,模糊控制器的设计将是设计的核心,因为它的好坏将直接影响到K P 、K I 和K D 的选取,从而影响到系统的控制精度。
2 模糊PID 控制器的设计
2.1 模糊控制器的算法设计
在本设计方案中,PID 参数自整定的思想就是先找出PID 控制器的3个参数K P 、K I 和K D 与偏差e 和偏差变化率e c 之间的模糊关系,在运行中通过不断检测e 和e c ,再根据模糊控制规则来对3个参量进行在线修改,以满足不同e 和e c 对控制器参数的不同要求,从而使被控对象具有良好的动、静态性能。
(1)输入输出变量的确立
基于对系统的上述分析,我们将偏差e 和偏差变化率e c 作为模糊控制器的输入,PID 控制器的3个参数K P 、K I 和K D 作为输出。
(2)输入、输出变量的模糊语言描述
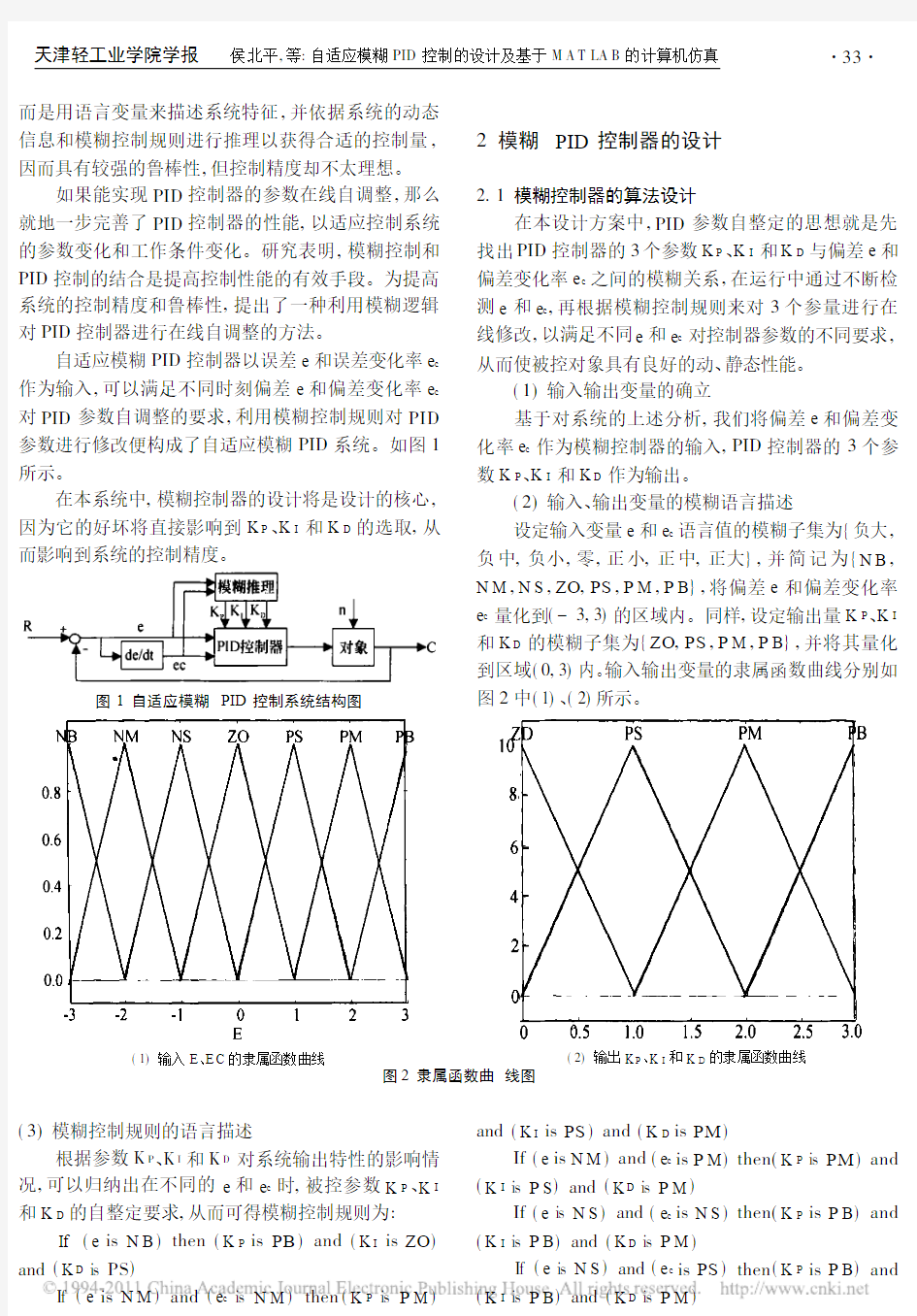
设定输入变量e 和e c 语言值的模糊子集为{负大,负中,负小,零,正小,正中,正大},并简记为{N B ,N M ,N S ,ZO ,PS ,P M ,P B },将偏差e 和偏差变化率e c 量化到(-3,3)的区域内。同样,设定输出量K P 、K I 和K D 的模糊子集为{ZO ,PS ,P M ,P B },并将其量化到区域(0,3)内。输入输出变量的隶属函数曲线分别如
图2中(1)、(2)
所示。
(1)输入E 、E C
的隶属函数曲线
(2)输出K P 、K I 和K D 的隶属函数曲线
图2 隶属函数曲线图
(3)模糊控制规则的语言描述
根据参数K P 、K I 和K D 对系统输出特性的影响情
况,可以归纳出在不同的e 和e c 时,被控参数K P 、K I 和K D 的自整定要求,从而可得模糊控制规则为: If (e is N B )then (K P is PB )and (K I is ZO )and (K D is PS )
If (e is N M )and (e c is N M )then (K P is P M )
and (K I is PS )and (K D is PM )
If (e is N M )and (e c is P M )then(K P is PM )and (K I is P S )and (K D is P M )
If (e is N S )and (e c is N S )then(K P is P B )and (K I is P B )and (K D is P M )
If (e is N S )and (e c is PS )then (K P is P B )and (K I is P B )and (K D is P M )
?
33? 天津轻工业学院学报 侯北平,等:自适应模糊PID 控制的设计及基于M A T LA B 的计算机仿真
If(e is P S)and(e c is N S)then(K P is P B)and (K I is P B)and(K D is P M)
If(e is P S)and(e c is PS)then(K P is PB)and (K I is P B)and(K D is P M)
If(e is P M)and(e c is N M)then(K P is PB)and (K I is ZO)and(K D is PS)
If(e is P M)and(e c is N M)then(K P is PM)and (K I is P S)and(K D is P S)
If(e is P B)then(K P is P B)and(K I is ZO)and (K D is PS)
2.2 模糊控制器的编辑
在M ATLAB命令窗口运行Fuzzy函数进入模糊逻辑编辑器,并建立一个新的FIS文件,选择控制器类型M amdani型,根据上面的分析分别输入E、E C、K P、K I和K D的隶属函数和量化区间,以If……then的形式输入模糊控制规则。取与(and)的方法为min,或(or)的方法为max,推理(implication)方法为min,合成(aggr eg atin)方法为m ax,非模糊化(defuzzification)方法为重心平均(centr oid),这样就建立了一个FIS系统文件,取名为f.fis。在M AT LAB 的M文件编辑器里建立一个名为fpid.m的文件,其内容为:matrix=readifs(‘f.fis’);这样就完成了模糊工具箱同SIM ULINK的链接,为整个控制系统的建立打下了基础。
2.3 PID控制器的确立
本系统中的PID控制器有5个输入量:e、e c、K P、K I和K D,而输出即为控制量U(n),它的控制算法为:
U(n)=K P{e(n)+
T
T i
n-1
i=0
e(i)+
T d
T
[e(n)-e(n-
1)]}
=K P e(n)+K I n-1i=0e(i)+K D[e(n)-e(n-
1)]}
其中,U(n)、e(n)分别为第n个采样时刻控制器输出(控制量)和输入量(偏差信号),K P为比例增益, T i、T d分别为积分、微分时间常数,T为采样周期,K I =K P
T
T i
,K D=K P
T d
T
。根据以上数学模糊,在SIMU LINK里面很容易建立起PID控制器模型。
3 利用SIMULINK对控制系统仿真
在SIM U LINK的菜单中,我们选择Fuzzy Log ic To olbox中的Fuzzy lo gic contro ller模块,并键入名字matrix。在这基础之上,我们加上量化因子K e、K ec、U p、U i和U d。这样,符合我们要求的模糊控制器便建立起来了。模糊控制器和PID控制器的结构如图
3:
(1)
模糊控制器(2)PID控制器
图3 模糊逻辑控制器、PID控制器结构图
显然,量化因子K e、K ec将e和e c量化为(-3,3)
上的模糊量,经模糊控制规则动态处理,成为(0,3)上
的模糊控制量,经量化因子U p、U i、U d将其精确化,便
可得到PID控制器的控制参量K P、K I和K D。将模糊
控制器和PID控制器分别打包后连在一起便构成了
期望的复合控制器,再将二者打包、封装便可得图4所
示的自适应模糊PID控制器。
在SIMU LINK环境中利用鼠标器将相应的模块
拖到窗口中,连接后便得到整个控制系统的模型,可以
根据输出结果来判断本控制器的性能。
系统运行后,可以利用示波器观察输出的情况,也
可以将数据存储到MAT LAB的工作空间中,再利用
绘图命令plot将输出曲线在单独窗口画出来。下面给
出了原系统、PID控制系统、自适应模糊PID控制系
统(见图5)的响应曲线如图6。
?
34
?天津轻工业学院学报 2001年 第4期
图4 自适应模糊PID
控制器
图5 自适应模糊PID
控制系统
图6 系统响应曲线
其中Curve 1是原系统响应曲线,Curve 2是PID 控制系统响应曲线,Curve 3是自适应模糊PID 控制系统响应曲线。
4 结 论
仿真结果表明,采用Fuzzy -PID 复合控制的算法,系统的响应速度加快、调节精度提高;稳态性能变好,而且没有超调和振荡,具有较强的鲁棒性。这是单纯的PID 控制难以实现的,它的一个显著特点就是在同样精度要求下,系统的过渡时间变短,这在实际的过程控
制中将有重大的意义。
实践证明,Fuzzy Log ic Too lbo x 可以方便地通过编辑FIS 文件来设计模糊控制器,可以灵活地设定和修改控制器参量,从而找到最优方案。而SIM ULINK 可以非常直观的构造控制系统并观察其结果。实验结果表明,MA TLAB 中的工具箱和SIM ULINK 是进行计算机仿真的有力工具。参 考 文 献:
[1] 冯冬青,谢宋和.模糊智能控制[M ].北京:化学工业出版
社,1998.
[2] 方一鸣.基于M A T L A B 的模糊控制系统仿真[J].自动化
与仪器仪表,2000,(2).
[3] 李士勇.智能控制理论与应用[M ].哈尔滨:哈尔滨工业
大学出版社,1990.
[4] 程卫国.M AT L AB 5.3应用指南[M ].北京:人民邮电出
版社,2000.
[5] 侯北平,卢 佩.基于M A T L A B 的BP 神经网络建模及
系统仿真[J].自动化与仪表,2001(1).
?
35? 天津轻工业学院学报 侯北平,等:自适应模糊PID 控制的设计及基于M A T LA B 的计算机仿真