用dsPIC30F2010控制无传感器BLDC电机
AN992
作者:Stan D’Souza
Microchip Technology
概述
本应用笔记介绍了如何使用dsPIC30F2010数字信号控制器控制无传感器的BLDC 电机。应用中采用的技术是基于另一Microchip应用笔记:《dsPIC30F在无传感器BLDC 控制中的应用》(AN901)。
本文介绍了如何将dsPIC30F2010器件用于AN901中介绍的硬件和软件,AN901中使用了dsPIC30F6010器件和dsPICDEM?MC1电机控制开发板。dsPIC30F6010具有80个引脚,拥有144 K字节的闪存程序存储器, 8 K字节的RAM以及数量较多的I/O。而dsPIC30F2010只有28个引脚,使其I/O数目受到限制。该款芯片只拥有12 K字节的闪存程序存储器以及512字节RAM的有限资源。
本应用笔记说明了如何对AN901应用笔记中介绍的硬件、软件和用户接口进行修改以利于其代码能够方便地移植到dsPIC30F2010器件。有关使用dsPIC30F实现BLDC无传感器控制的设计细节,请参阅应用笔记AN901。由于程序代码实现的功能并未改变,因此AN901中介绍的所有可实现的BLDC控制功能仍旧是相同的。
所需硬件
实现本文中介绍的电机控制应用需要使用以下硬件:?PICDEM? MCLV 开发板(图1)
?Hurst DMB0224C10002 CL B 6403 24 V BLDC 电机
?24V直流电源
用户可以从Microchip购买上述全部硬件或只购买其中某项。有关订购信息,请浏览Microchip 网站的开发工具部分。
硬件改动
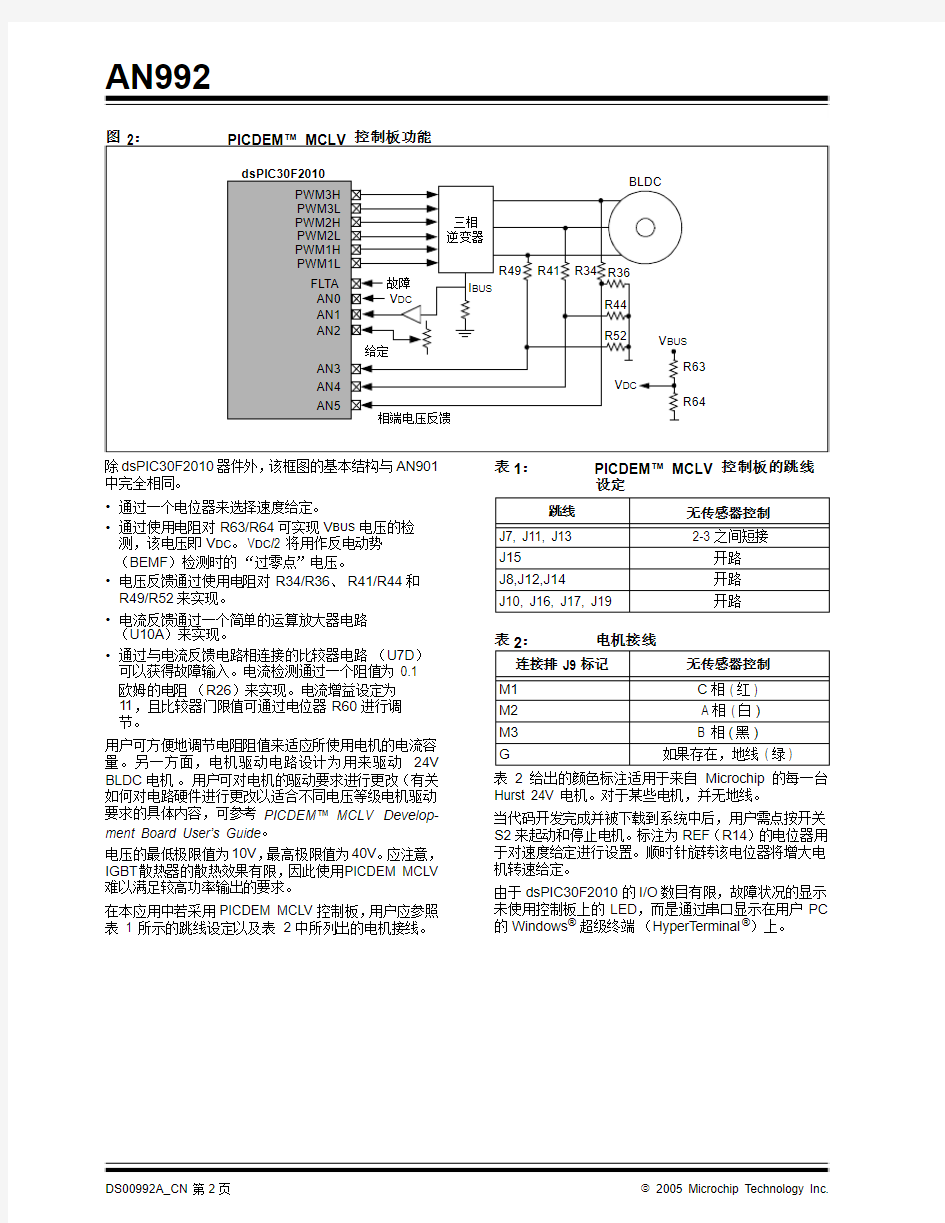
图2 给出了无传感器BLDC电机控制应用的简化结构框图。该图有助于用户自己开发硬件来驱动无传感器的BLDC电机。PICDEM MCLV 控制板的原理图附录A中给出。
图1:PICDEM? MCLV 开发板
用dsPIC30F2010控制无传感器BLDC电机
2005 Microchip Technology Inc.DS00992A_CN第1页
AN992
DS00992A_CN 第2页 2005 Microchip Technology Inc.
图 2:
PICDEM? MCLV 控制板功能
除dsPIC30F2010器件外,该框图的基本结构与AN901中完全相同。 ?通过一个电位器来选择速度给定。
?通过使用电阻对R63/R64可实现V BUS 电压的检测,该电压即V DC 。 V DC /2 将用作反电动势(BEMF )检测时的“过零点”电压。
?电压反馈通过使用电阻对R34/R36、R41/R44和 R49/R52来实现。 ?电流反馈通过一个简单的运算放大器电路(U10A )来实现。
?通过与电流反馈电路相连接的比较器电路(U7D )可以获得故障输入。电流检测通过一个阻值为0.1 欧姆的电阻(R26)来实现。电流增益设定为11,且比较器门限值可通过电位器R60进行调节。 用户可方便地调节电阻阻值来适应所使用电机的电流容量。另一方面,电机驱动电路设计为用来驱动24V BLDC 电机 。 用户可对电机的驱动要求进行更改(有关如何对电路硬件进行更改以适合不同电压等级电机驱动要求的具体内容,可参考PICDEM? MCLV Develop-ment Board User’s Guide 。 电压的最低极限值为10V ,最高极限值为40V 。应注意,IGBT 散热器的散热效果有限,因此使用PICDEM MCLV 难以满足较高功率输出的要求。 在本应用中若采用PICDEM MCLV 控制板,用户应参照表1 所示的跳线设定以及表2中所列出的电机接线。
表1:
PICDEM? MCLV 控制板的跳线设定
表2:
电机接线
表2给出的颜色标注适用于来自Microchip 的每一台Hurst 24V 电机。对于某些电机,并无地线。 当代码开发完成并被下载到系统中后,用户需点按开关S2来起动和停止电机。标注为REF (R14)的电位器用于对速度给定进行设置。顺时针旋转该电位器将增大电机转速给定。
由于dsPIC30F2010的I/O 数目有限,故障状况的显示未使用控制板上的LED ,而是通过串口显示在用户PC 的Windows ?超级终端(HyperTerminal ?)上。
三相逆变器
AN1PWM3H PWM3L PWM2H PWM2L PWM1H PWM1L FLTA 故障BLDC
dsPIC30F2010
AN3AN4AN5
AN0V DC
I BUS
AN2给定
相端电压反馈R49R41
R34R36
R44R52
V BUS
V DC
R63
R64跳线
无传感器控制J7, J11, J13 2-3之间短接
J15开路J8,J12,J14
开路J10, J16, J17, J19
开路
连接排 J9标记
无传感器控制M1C 相 (红) M2 A 相 (白)M3 B 相(黑)G
如果存在,地线 (绿)
AN992
对dsPIC30F2010编程
借助PICDEM MCLV控制板可实现对dsPIC30F2010编程。由于dsPIC30F2010的I/O资源有限,串口引脚与编程引脚复用。在对器件进行编程时,DIP开关S4应置于PRGM方向。当编程完成后,应将DIP开关置于DEBUG位置以执行程序。如果ICD2连接到 PICDEM MCLV控制板作为调试器使用,那么编程后J6 连接器应保持连接。如果ICD2作为编程器使用,编程后应将 J6连接器从ICD2拔除,以确保单片机独立正常执行程序。
为使本应用程序在PICDEM MCLV 控制板上正常工作,需进行以下的配置设定:
振荡源:主振荡器
主振荡器模式:XT w/PLL 8x
通信端口选择: EMUC2
和 EMUD2
根据需要可使能或禁止其他设定,或在应用程序中对其进行修改。
软件改动:
与AN901相比,本应用中的软件并未作较大的修改,但去除了LCD用户接口以及调试程序。有关串行接口的内容将在下一部分进行介绍。用户接口的确增加了代码长度并且在应用开发阶段需要使用一片dsPIC30F3010。在开发模式时,应设置:
#define DEVELOPMODE TRUE
defs.h文件中的该项设置使得代码中的所有条件语句自动使能UART并运行于用户接口模式。在代码全部开发完成后,可选择:
#define DEVELOPMODE FALSE
defs.h文件中的该项设置禁止串行用户接口并将参数硬编码到闪存存储器中。
为确保代码长度适合dsPIC30F2010,应使用 C30编译器选项中的存储空间优化选项。从MPLAB主菜单中选择Project>Build Options>Project。当显示Build Options 对话框时,应选择MPLAB? C30选项卡并设置Catego-ries>Optimization>Optimization level>s(用于存储空间优化)。用户接口
需要通过用户接口对无传感器BLDC电机控制应用中使用的不同参数进行调整。本应用中共有45个可以修改的用户参数。有关这些参数及其功能/用法以及如何对其调整的具体内容,请参见《dsPIC30F在无传感器BLDC 控制中的应用》(AN901)应用笔记。
在AN901中,用户参数的修改是通过一个LCD显示器和按钮来实现。由于PICDEM MCLV电路板上未配置LCD显示器,因此用户接口已更改为双线串行接口。本应用中采用的新用户接口使用dsPIC30F2010 上的RS-232端口与通信终端(例如, Windows 超级终端)连接来实现,通信速率为19200波特率。
借助通信终端,通过用户接口可实现对参数的更改。AN901中所有参数通过电机控制开发板上配置的LCD 屏进行设定,而现在这些参数的设定都通过串行接口来实现。
表3 列出了参数的名称,缩写形式以及说明。可通过用户接口对全部45个控制参数进行设置。
参数可归类为:
?电机参数- 与电机有关的参数
?起动参数 - 与起动有关的参数
?控制参数- 与软件中使用的不同PI或PID控制有关的参数
?极限参数- 与软件中的各种极限设置有关的参数
?控制板参数- 与控制板上元器件以及它们如何与软件交互有关的参数
注:可从Microchip网站
(https://www.360docs.net/doc/c816009017.html,)获得该应用程序的
源代码,附于本应用笔记电子(pdf)版本
后。
2005 Microchip Technology Inc.DS00992A_CN第3页
AN992
DS00992A_CN 第4页 2005 Microchip Technology Inc.
表3:
电机控制参数
参数
键入缩写形式
说明
电机参数DIRECTION DD 0或DD 10 = 正向1 = 反向No. Motor Poles MP <值>电机极数
Blanking Count BC <值> Windmilling Dem WD <值> 起动参数Lock Pos.1 Time
LP1T <值>单位为10 ms 间隔Lock Pos.2 Time LP2T <值>单位为10 ms 间隔Lock Pos.1 Dem LP1D <值>PWM 占空比百分比Lock Pos.2 Dem LP2D <值>PWM 占空比百分比Ramp Start Speed RSS <值>加速起始转速,单位为RPM Ramp End Speed RES <值>加速终止转速,单位为 RPM Ramp Start Dem RSD <值>PWM 占空比百分比Ramp End Dem RED <值>PWM 占空比百分比Ramp Duration RD <值>单位为10 ms 间隔Tolerance Check TC <值>Auto Re-acquire ARA 0 或 ARA 1 0 = 禁止1 =使能Starting Control SC 0 和SC 10 = 电压控制1 = 电流控制Acquire Method AM 0 或AM 10 = 方法11 = 方法2
ZeroX Enable Spd
ZXES <值>
过零检测使能时的电机转速
2005 Microchip Technology Inc.DS00992A_CN 第5页
AN992
控制参数
CONTROL MODE
CM 0,CM 1,CM 2或CM 30 =电压闭环 1 = 电流闭环 2 = 电压开环 3 = 电流开环
Phase Adv. Enable Spd PAES <值>Phase Adv. Slope PAS <值> Current P Gain CKP <值>Current I Gain CKI <值>Current D Gain CKD <值>Speed P Gain SKP <值>Speed I Gain SKI <值> Voltage Demand VD <值>Volts P Gain VKP <值>Volts I Gain VKI <值> 极限参数Stall Time Limit STL <值>Over Speed Limit OSL <值>过速极限值,单位为RPM Over Volts Limit OVL <值> Over Current Lim OCL <值> 控制板参数
Current Scale X CSX <值>Current Scale /CSD <值>Volts Scale X VSX <值>Volts Scale / VSD <值>Zero X Level Thd ZXL <值>Acquire Threshld AT <值>Acquire Level Td AL <值> Rotation Timeout RT <值>Pot / for Duty PDD <值>Pot / for Currnt PDC <值>Pot X for Speed PXS <值>Braking Ramp T
BRT <值>
表3:
电机控制参数(续)
参数
键入缩写形式
说明
AN992
DS00992A_CN 第6页 2005 Microchip Technology Inc.
串行用户接口的使用
只有在待机或系统处于复位状态时才能对用户参数进行修改。当电机运行时,通信终端将显示电机转速以及PWM 占空比。
应将通信终端连接到PICDEM MCLV 控制板的RS232连接器(J1)。应如下设置系统运行参数。命令集格式为大小写敏感。如果键入的命令不正确,系
统将显示如图3所示的消息。欲获得有关命令集的更多信息,可键入
?? <回车键>
图4中所示的响应消息提示了更为具体的请求。欲获得一类具体命令集的有关信息,可键入一个问号符后跟对应该命令集类型的字母。
图3
:不正确的命令信息
图4:命令集帮助菜单
波特率19200数据位8奇偶校验无停止位1流控制
无
2005 Microchip Technology Inc.DS00992A_CN 第7页
AN992
电机参数
键入以下命令将显示电机参数:?M<回车键>
如图5所示,响应消息中列出了电机参数及其当前值。欲对参数值进行改动,应键入参数缩写并随后键入新的参数值(两者之间由空格分隔)。DIRECTION 参数(DD )只使用两个参数值: 0或 1。欲改变电机旋转方向,应键入:
DD<空格>1<回车键>
注意,DD 为大写形式,且参数缩写和参数值1之间存在一个空格。 命令及其响应如图6所示。设定值从00000改为00001( 相反方向)。假定将电机极数从10改至8,应如下键入:
MP<空格>8<回车键>
该命令格式及其响应如图7所示。设定值从00010改至00008。
图5:
电机参数
图6:电机转向命令及其响应
AN992
DS00992A_CN 第8页 2005 Microchip Technology Inc.
图7:
电机极数命令及其响应
控制参数
作为“?C ”命令的响应,将如图8所示显示控制参数名称及其当前值。
欲对控制参数进行修改,需键入该参数的缩写形式并随
后键入期望的修改值。例如,如果期望将速度积分增益从40改至200时,应键入“SKI 200”。
图8:控制参数
AN992
起动参数
起动参数用于对无传感器起动控制算法进行微调并且是
改动最为频繁的参数。由于其中一些参数的变化间隔为
数十毫秒,因此请注意表3 中的说明并仔细阅读AN901
中的相关内容。
图9:起动参数
2005 Microchip Technology Inc.DS00992A_CN第9页
AN992
DS00992A_CN 第10页 2005 Microchip Technology Inc.
极限参数
极限参数如图10所示。
图10:
极限参数
控制板参数
图11中显示了控制板参数。有关这些参数的具体内容请参考应用笔记AN901。
图11:控制板参数
2005 Microchip Technology Inc.DS00992A_CN 第11页
AN992
运行模式
如前所述,只有在待机模式下才能查看参数。 在电机实际运行过程中,电机转速以及PWM 占空比将如图12所示不断更新。
图12:
速度和占空比的实时显示
故障情形
如果在电机起动或运行过程中出现故障,它将以如图13所示的形式进行报告。 报告的故障包括:?起动失败(FAILED TO START )?过电流(OVER CURRENT )?过电压(OVER VOLTAGE )? 硬件故障(HARDWARE TRIP )?过速(OVER SPEED )
?转子位置丢失(SENSORLESS LOST )?堵转(STALLED )
用户必须通过点按控制板上的S2以复位故障或停止电机运行。当系统复位后,用户可对必要参数进行编辑修改。
图13:故障消息
AN992
结论
28引脚的dsPIC30F2010为实现无传感器BLDC电机控
制提供了理想的低成本解决方案。通过本文中介绍的具
有较高灵活性的串行用户接口,用户可对起动和运行无
传感器 BLDC电机应用所需的应用参数进行微调。有关
内容在AN901中进行了具体介绍。
DS00992A_CN 第12页 2005 Microchip Technology Inc.
AN992附录A:原理图
2005 Microchip Technology Inc.DS00992A_CN第13页
AN992
DS00992A_CN 第14页 2005 Microchip Technology Inc.
2005 Microchip Technology Inc.DS00992A_CN 第15页
提供本文档的中文版本仅为了便于理解。Microchip Technology Inc.及其分公司和相关公司、各级主管与员工及事务代理机构对译文中可能存在的任何差错不承担任何责任。建议参考Microchip Technology Inc.的英文原版文档。本出版物中所述的器件应用信息及其他类似内容仅为您提供便利,它们可能由更新之信息所替代。确保应用符合技术规范,是您自身应负的责任。Microchip 对这些信息不作任何明示或暗示、书面或口头、法定或其他形式的声明或担保,包括但不限于针对其使用情况、质量、性能、适销性或特定用途的适用性的声明或担保。Microchip 对因这些信息及使用这些信息而引起的后果不承担任何责任。未经Microchip 书面批准,不得将Microchip 的产品用作生命维持系统中的关键组件。在Microchip 知识产权保护下,不得暗中或以其他方式转让任何许可证。
商标
Microchip 的名称和徽标组合、Microchip 徽标、Accuron 、dsPIC 、K EE L OQ 、micro ID 、MPLAB 、PIC 、PICmicro 、PICSTART 、PRO MATE 、PowerSmart 、rfPIC 和
SmartShunt 均为Microchip Technology Inc .在美国和其他国家或地区的注册商标。
AmpLab 、FilterLab 、Migratable Memory 、MXDEV 、MXLAB 、PICMASTER 、SEEVAL 、SmartSensor 和The Embedded Control Solutions Company 均为Microchip Technology Inc .在美国的注册商标。
Analog-for-the-Digital Age 、Application Maestro 、dsPICDEM 、https://www.360docs.net/doc/c816009017.html, 、dsPICworks 、ECAN 、ECONOMONITOR 、FanSense 、FlexROM 、fuzzyLAB 、In-Circuit Serial Programming 、ICSP 、ICEPIC 、Linear Active Thermistor 、MPASM 、MPLIB 、MPLINK 、MPSIM 、PICkit 、PICDEM 、https://www.360docs.net/doc/c816009017.html, 、PICLAB 、PICtail 、
PowerCal 、PowerInfo 、PowerMate 、PowerTool 、rfLAB 、rfPICDEM 、Select Mode 、Smart Serial 、SmartTel 、Total Endurance 和WiperLock 均为Microchip Technology Inc .在美国和其他国家或地区的商标。
SQTP 是Microchip Technology Inc .在美国的服务标记。在此提及的所有其他商标均为各持有公司所有。? 2005, Microchip Technology Inc .版权所有。
请注意以下有关Microchip 器件代码保护功能的要点:?Microchip 的产品均达到Microchip 数据手册中所述的技术指标。
?Microchip 确信:在正常使用的情况下,Microchip 系列产品是当今市场上同类产品中最安全的产品之一。
?
目前,仍存在着恶意、甚至是非法破坏代码保护功能的行为。就我们所知,所有这些行为都不是以Microchip 数据手册中规定的操作规范来使用Microchip 产品的。这样做的人极可能侵犯了知识产权。?Microchip 愿与那些注重代码完整性的客户合作。
?
Microchip 或任何其他半导体厂商均无法保证其代码的安全性。代码保护并不意味着我们保证产品是“牢不可破”的。
代码保护功能处于持续发展中。Microchip 承诺将不断改进产品的代码保护功能。任何试图破坏Microchip 代码保护功能的行为均可视为违反了《数字器件千年版权法案(Digital Millennium Copyright Act )》。如果这种行为导致他人在未经授权的情况下,能访问您的软件或其他受版权保护的成果,您有权依据该法案提起诉讼,从而制止这种行为。
Microchip 位于美国亚利桑那州Chandler 和Tempe 及位于加利福尼亚州Mountain View 的全球总部、设计中心和晶圆生产厂均于2003年10月通过了ISO/TS-16949:2002 质量体系认证。公司在PICmicro ? 8位单片机、K EE L OQ ?跳码器件、串行EEPROM 、单片机外设、非易失性存储器和模拟产品方面的质量体系流程均符合ISO/TS-16949:2002。此外,Microchip 在开发系统的设计和生产方面的质量体系也已通过了ISO 9001:2000
认证。
DS00992A_CN 第16页 2005 Microchip Technology Inc.
全球销售及服务网点
06/09/05
美洲
公司总部Corporate Office 2355 West Chandler Blvd.Chandler, AZ 85224-6199Tel: 1-480-792-7200 Fax: 1-480-792-7277技术支持:
https://www.360docs.net/doc/c816009017.html, 网址:https://www.360docs.net/doc/c816009017.html, 亚特兰大Atlanta Alpharetta, GA
Tel: 1-770-640-0034 Fax: 1-770-640-0307波士顿Boston Westborough, MA Tel: 1-774-760-0087 Fax: 1-774-760-0088芝加哥Chicago Itasca, IL
Tel: 1-630-285-0071 Fax: 1-630-285-0075达拉斯Dallas Addison, TX
Tel: 1-972-818-7423 Fax: 1-972-818-2924底特律Detroit
Farmington Hills, MI Tel: 1-248-538-2250Fax: 1-248-538-2260科科莫Kokomo Kokomo, IN
Tel: 1-765-864-8360Fax: 1-765-864-8387洛杉矶Los Angeles Mission Viejo, CA Tel: 1-949-462-9523 Fax: 1-949-462-9608圣何塞San Jose Mountain View, CA Tel: 1-650-215-1444Fax: 1-650-961-0286加拿大多伦多Toronto Mississauga, Ontario, Canada
Tel: 1-905-673-0699 Fax: 1-905-673-6509
亚太地区
中国-北京
Tel: 86-10-8528-2100 Fax: 86-10-8528-2104中国-成都
Tel: 86-28-8676-6200 Fax: 86-28-8676-6599中国-福州
Tel: 86-591-8750-3506 Fax: 86-591-8750-3521中国-香港特别行政区Tel: 852-2401-1200 Fax: 852-2401-3431中国-上海
Tel: 86-21-5407-5533 Fax: 86-21-5407-5066中国-沈阳
Tel: 86-24-2334-2829 Fax: 86-24-2334-2393中国-深圳
Tel: 86-755-8203-2660 Fax: 86-755-8203-1760中国-顺德
Tel: 86-757-2839-5507 Fax: 86-757-2839-5571中国-青岛
Tel: 86-532-8502-7355 Fax: 86-532-8502-7205中国-武汉
Tel: 86-27-5980-5300 Fax: 86-27-5980-5118台湾地区-高雄Tel: 886-7-536-4818Fax: 886-7-536-4803台湾地区-台北
Tel: 886-2-2500-6610 Fax: 886-2-2508-0102台湾地区-新竹Tel: 886-3-572-9526Fax: 886-3-572-6459
亚太地区
澳大利亚Australia - Sydney Tel: 61-2-9868-6733 Fax: 61-2-9868-6755印度India - Bangalore Tel: 91-80-2229-0061 Fax: 91-80-2229-0062印度India - New Delhi Tel: 91-11-5160-8631Fax: 91-11-5160-8632日本Japan - Kanagawa Tel: 81-45-471- 6166 Fax: 81-45-471-6122韩国Korea - Seoul Tel: 82-2-554-7200 Fax: 82-2-558-5932 或82-2-558-5934
马来西亚Malaysia - Penang Tel:011-604-646-8870Fax:011-604-646-5086菲律宾Philippines - Manila Tel: 011-632-634-9065Fax: 011-632-634-9069新加坡Singapore Tel: 65-6334-8870 Fax: 65-6334-8850
欧洲
奥地利Austria - Weis Tel: 43-7242-2244-399Fax: 43-7242-2244-393丹麦Denmark - Ballerup Tel: 45-4450-2828 Fax: 45-4485-2829法国France - Massy Tel: 33-1-69-53-63-20 Fax: 33-1-69-30-90-79德国Germany - Ismaning Tel: 49-89-627-144-0 Fax: 49-89-627-144-44意大利Italy - Milan Tel: 39-0331-742611 Fax: 39-0331-466781荷兰Netherlands - Drunen Tel: 31-416-690399 Fax: 31-416-690340英国England - Berkshire Tel: 44-118-921-5869Fax: 44-118-921-5820
BLDC无位置传感器控制技术
BLDC无位置传感器控制技术 2014.11.12 duguqiubai1234@https://www.360docs.net/doc/c816009017.html, BLDC电机是一种结合了直流电机和交流电机优点的改进型电机。其转子采用永磁材料励磁,体积小、重量轻、结构简单、维护方便。BLDC电机又具有控制简便、高效节能等一系列优点,已广泛应用于仪表和家用电器等领域。 本文主要讨论高压BLDC风机无位置传感器起动和运行技术。 一、无位置传感器技术简介 BLDC电机最简单的控制方法是安装三个位置传感器,使用六步换相法控制。但传感器器会增大电机的体积和成本,另外传感器的位置精度影响电机的运行;特别对于极对数较多的电机,传感器偏差少许机械角度也可能引起电角度偏差很多。在某些恶劣环境下,如高温、潮湿、腐蚀性气体等环境,传感器易损坏,因而无法使用。 使用无位置传感器方式则可以克服上述缺点。 无传感器BLDC在性能上也存在一些不足: (1)难以实现重负载(例如额定转矩)起动。好在风机属于轻负载起动的情况。 (2)难以快速起动。例如很难实现1秒内从静止加速到全速。好在风机通常不要求很短时间内完成加速。 (3)无法实现全速范围内任意调速。有传感器BLDC能够实现0%~100%额定转速范围内的调速,而无传感器BLDC通常只能实现10%~100%额定转速范围内的调速。好在风机通常不要求10%额定转速以下运行。 经过以上分析,可以看出风机非常适合使用无位置传感器方式控制。 国内高压无位置传感器BLDC技术仍处于不成熟阶段。使用该技术的产品应以稳定可靠为主要要求,而不是以性能优越为主要要求。高压无传感器BLDC如果追求性能优越,则成本太高,技术难度过大。 风机类产品通常起动后连续工作时间较长,所以通常不要求快速起动,不也要求反复起停。
无刷电机工作及控制原理(图解)
无刷电机工作及控制原理(图解) 左手定则,这个就是电机转动受力分析得基础,简单说就就是磁场中得载流导体,会受到力得作用。 让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力得方向,我相信喜欢玩模型得人都还有一定物理基础得哈哈.
让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生得电动势方向。为什么要讲感生电动势呢?不知道大家有没有类似得经历,把电机得三相线合在一起,用手去转动电机会发现阻力非常大,这就就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生与转动方向相反得力,大家就会感觉转动有很大得阻力。不信可以试试. 三相线分开,电机可以轻松转动 三相线合并,电机转动阻力非常大 右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指得那一端就就是通电螺旋管得N极。
状态1 当两头得线圈通上电流时,根据右手螺旋定则,会产生方向指向右得外加磁感应强度B(如粗箭头方向所示),而中间得转子会尽量使自己内部得磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。 当转子磁场方向与外部磁场方向垂直时,转子所受得转动力矩最大.注意这里说得就是“力矩”最大,而不就是“力”最大。诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。补充一句,力矩就是力与力臂得乘积。其中一个为零,乘积就为零了. 当转子转到水平位置时,虽然不再受到转动力矩得作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管得电流方向,如下图所示,转子就会继续顺时针向前转动, 状态2 如此不断改变两头螺线管得电流方向,内转子就会不停转起来了。改变电流方向得这一动作,就叫做换相。补充一句:何时换相只与转子得位置有关,而与其她任何量无直接关系。 第二部分:三相二极内转子电机 一般来说,定子得三相绕组有星形联结方式与三角联结方式,而“三相星形联结得二二导通方式”最为常用,这里就用该模型来做个简单分析。
无刷直流电机工作原理详解
无刷直流电机工作原理详解 日期: 2014-05-28 / 作者: admin / 分类: 技术文章 1. 简介 本文要介绍电机种类中发展快速且应用广泛的无刷直流电机(以下简称BLDC)。BLDC被广泛的用于日常生活用具、汽车工业、航空、消费电子、医学电子、工业自动化等装置和仪表。顾名思义,BLDC不使用机械结构的换向电刷而直接使用电子换向器,在使用中BLDC相比有刷电机有许多的优点,比如: 能获得更好的扭矩转速特性; 高速动态响应; 高效率; 长寿命; 低噪声; 高转速。 另外,BLDC更优的扭矩和外形尺寸比使得它更适合用于对电机自身重量和大小比较敏感的场合。 2. BLDC结构和基本工作原理 BLDC属于同步电机的一种,这就意味着它的定子产生的磁场和转子产生的磁场是同频率的,所以BLDC并不会产生普通感应电机的频差现象。BLDC中又有单相、2相和3相电机的区别,相类型的不同决定其定子线圈绕组的多少。在这里我们将集中讨论的是应用最为 广泛的3相BLDC。 2.1 定子 BLDC定子是由许多硅钢片经过叠压和轴向冲压而成,每个冲槽内都有一定的线圈组成了绕组,可以参见图2.1.1。从传统意义上讲,BLDC的定子和感应电机的定子有点类似,不过在定子绕组的分布上有一定的差别。大多数的BLDC定子有3个呈星行排列的绕组,每 个绕组又由许多内部结合的钢片按照一定的方式组成,偶数个绕组分布在定子的周围组成了偶数个磁极。
BLDC的定子绕组可以分为梯形和正弦两种绕组,它们的根本区别在于由于绕组的不同连接方式使它们产生的反电动势(反电动势的相关介绍请参加EMF一节)不同,分别呈现梯形和正弦波形,故用此命名了。梯形和正弦绕组产生的反电动势的波形图如图2.1.2和图 2.1.3所示。
电动车无刷马达控制器硬件电路详解
电动车无刷马达控制器硬件电路详解 电动车无刷电机是目前最普及的电动车用动力源,无刷电机以其相对有刷电机长寿,免维护的特点得到广泛应用,然而由于其使用直流电而无换向用的电刷,其换向控制相对有刷电机要复杂许多,同时由于电动车负载极不稳定,又使用电池作电源,因此控制器自身的保护及对电机,电源的保护均对控制器提出更多要求。 自电动车用无刷电动机问世以来,其控制器发展分两个阶段:第一阶段为使用专用无刷电动机控制芯片为主组成的纯硬件电路控制器,这种电路较为简单,其中控制芯片的代表是摩托罗拉的MC33035,这个不是这里的主题,所以也不作深入介绍。第二阶段是以MCU为主的控制芯片。这是这篇文章介绍的重点,在MCR版本的设计中,揉和了模拟、数字、大功率MOSFET 驱动等等许多重要应用,结合MCU智能化控制,是一个非常有启迪性的设计。 今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1: 整机电路看起来很复杂,我们将其简化成框图再看看:
图2:电路框图 电路大体上可以分成五部分: 一、电源稳压,供应部分; 二、信号输入与预处理部分; 三、智能信号处理,控制部分; 四、驱动控制信号预处理部分; 五、功率驱动开关部分。 下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。 图3:PIC16F72在控制器中的各引脚应用图 我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振
荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT 的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。内部软件资源我们在软件部分讲解,这里并不需要很关心。 各引脚应用如下: 1:MCLR复位/烧写高压输入两用口 2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。正常运转时电压应在0-1.5V左右 3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。正常时电压应在 3V以上 4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。 5:模拟/数字量输入口:刹车信号电压输入口。可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。 6:数字量输入口:1+1助力脉冲信号输入口,当骑行者踏动踏板使车前行时,该口会收到齿轮传感器发出的脉冲信号,该信号被单片机接收到后会给电机输出一定功率以帮助骑行者更轻松地往前走。 7:模拟/数字量输入口:由于电机的位置传感器排列方法不同,该口的电平高低决定适合于哪种电机,目前市场上常见的有所谓120°和60°排列的电机。有的控制器还可以根据该口的电压高低来控制起动时电流的大小,以适合不同的力度需求。 8:单片机电源地。 9:单片机外接振荡器输入脚。 10:单片机外接振荡器反馈输出脚。 11:数字输入口:功能开关1 12:数字输入口:功能开关2 13:数字输出口:PWM调制信号输出脚,速度或电流由其输出的脉冲占空比宽度控制。 14:数字输入口:功能开关3 15、16、17:数字输入口:电机转子位置传感器信号输入口,单片机根据其信号变化决定让电机的相应绕组通电,从而使电机始终向需要的方向转动。这个信号上面讲过有120°和60°之分,这个角度实际上是这三个信号的电相位之差,120°就是和三相电一样,每个相位和前面的相位角相差120°。60°就是相差60°。 18:数字输出口:该口控制一个LED指示灯,大部分厂商都将该指示灯用作故障情况显示,当控制器有重大故障时该指示灯闪烁不同的次数表示不同的故障类型以方便生产、维修。 19:单片机电源地。 20:单片机电源正。上限是5.5V。 21:数字输入口:外部中断输入,当电流由于意外原因突然增大而不在控制范围时,该口有低电平脉冲输入。单片机收到此信号时产生中断,关闭电机的输出,从而保护重要器件不致损坏或故障不再扩大。 22:数字输出口:同步续流控制端,当电流比较大时,该口输出低电平,控制其后逻辑电路,使同步续流功能开启。该功能在后面详细讲解。 23--28:数字输出口:是功率管的逻辑开关,单片机根据电机转子位置传感器的信号,由这里输出三相交流信号控制功率MOSFET开关的导通和关闭,使电机正常运转。
无位置传感器的无刷直流电机 (
基于中颖SH79F168单片机的航模无刷电调方案 摘要:本文提出了一种采用中颖8位单片机SH79F168作为主控芯片的航模无刷电调方案,用AD采样的方法进行反电动势检测以控制无位置传感器的无刷直流电机。该芯片内部集成了PWM、ADC、增强外部中断等有针对性的功能模块,使软硬件设计都大为简化。经实际项目应用,该系统运行稳定可靠,且与市面上的其它控制方案相比具有成本优势。 关键词:航模 无刷电调SH79F168 无位置传感器BLDC 反电动势法 1 概述 无位置传感器的无刷直流电机(Brushless Direct Current Motor, BLDCM)由于其快速、可靠性高、体积小、重量轻等特点,在航模领域得到了广泛的应用。但是与有刷电机和有位置传感器的无刷直流电机相比,其控制算法要复杂得多。加上航模设计中对重量和体积的要求非常严格,因此要求硬件电路尽可能简单,更增加了软件的难度。 本文提出了一种基于中颖8位单片机SH79F168的控制方案,借助于该芯片片内集成的针对电机控制的功能模块,只需很少的外围电路即可搭建控制系统,实现基于反电动势法的无位置传感器BLDC控制,在保证稳定性和可靠性的基础上大大降低了系统成本。而且该芯片与传统8051完全兼容,易于上手,从而也降低了研发成本。 2 系统硬件设计 本方案选用中颖的8位单片机 SH79F168做为主控芯片。该芯片采用优化的单机器周期8051核,内置16K FLASH存储器,兼容传统8051所有硬件资源,采用JTAG仿真方式,内置16.6M 振荡器,同时扩展了如下功能: 双DPTR指针. 16位 x 8乘法器和16位/8除法器. 3通道12位带死区控制PWM,6路输出,输出极性可设为中心或边沿对齐 模式;同时集成故障检测功能,可瞬时 关闭PWM输出; 7通道10位ADC模块; 内置放大器和比较器,可用作电流放大采样和过流保护; 增强的外部中断,提供4种触发方式; 提供硬件抗干扰措施; Flash自编程功能,方便存储参数; 主系统硬件架构如图1所示,从图中可以看出该系统大部分功能都由片内集成的模块完成。外围电路的简化一方面可以提高系统可靠性,另一方面也降低了成本。
永磁同步电机无位置传感器
Performance Comparison of Permanent Magnet Synchronous Motors and Controlled Induction Motors in Washing Machine Applications using Sensorless Field Oriented Control Aengus Murray, Marco Palma and Ali Husain Energy Saving Products Division International Rectifier El Segundo, CA 90245 Abstract—This paper describes two alternative variable speed motor drive systems for washing machine applications. Three phase induction motors with tachometer feedback and direct drive permanent magnet synchronous motors with hall sensor feedback are two drive systems commonly used in North American washers today. Appliance manufacturers are now evaluating sensorless drive systems because of the low reliability and high cost of the speed and position feedback sensors. A Field Oriented Control Algorithm with an embedded rotor flux and position estimation algorithm enables sensorless control of both permanent magnet synchronous motors and induction motors. The estimator derives rotor shaft position and speed from rotor flux estimates obtained from measured stator currents and the applied voltages. Sampling of currents in the dc link shunt simplifies stator current measurement and minimizes cost. Field oriented control algorithm allows good dynamic control of torque and enables an extended speed range through field weakening. The digital control algorithm runs on a unique hardware engine that allows algorithms to be designed using graphical tools. A common hardware platform can run either the PMSM or IM using sensorless field oriented control in a front loading washer application. Test results are presented for both drives in standard wash cycles. Keywords-component; Advanced Control; Field Oriented Control Algorithm;, Appliance control architecture; I.I NTRODUCTION Accurate control of drum speed is required in both horizontal and vertical axis washer machines [1]. In front loading horizontal axis washers, the drum speed determines the washing action. There is a critical drum RPM, depending on the drum radius, above which the clothes stick to the inside edge of the drum. At this speed, the centrifugal force due to rotation balances the weight of the wet clothes. At speeds below this, the clothes will stick to the side of the drum until the component of the weight acting along the radius is greater than the centrifugal force. Once this angle is reached, the clothes fall back down into the base of the drum. The speed of the drum determines how vigorously the clothes are washed and allows a gentle wash cycle to be selected for delicate items. In the spin mode, the water is drained and the drum speed is increased well beyond the critical speed and the water forced out of the cloths by the centrifugal force. In traditional top loading vertical axis machines, the agitation action is produced mechanically using a gearbox and clutch. However, the introduction of speed control systems not only simplifies the mechanical system but also allows for wash cycle control. The control of the speed and angle of stroke allows the system designer to better manage the washing action and so develop wash cycles that use less water. European front-loading washers have used variable speed control for many years and typically use a universal ‘brush type’ motor. However, the American washer uses a larger drum size, which requires a motor with a power range beyond that of the universal motor solution. The front-loading drive solutions on the market today include direct drive permanent magnet synchronous motor drives or a belt drive using an induction motor. Appliance manufacturers are now evaluating these two drive types in top-loading machine to reduce cost and improve performance. However, both these drive systems use shaft feedbacks sensors. The direct drive PMSM typically uses a Hall Effect sensor for position feedback while the induction motor drive typically uses an analog or digital tachometer for speed feedback. The ideal universal drive can run either a PMSM or an induction motor without shaft feedback sensors. However, a single hardware platform can efficiently run either a PMSM or an induction motor using sensorless field oriented control algorithm. In both cases, speed and position estimates derive from motor terminal voltages and currents. Induction motors were initially preferred for washing machine drives because of the ease of running in high speed field weakening mode even with simple scalar control methods. However, the PMSM is now becoming a viable solution because field oriented control approach enables high speed field weakening. In an induction motor, the torque producing current flows in both the rotor and stator windings while the air gap field generation needs additional field current. Therefore, in washing mode, the total copper losses are more than double
无刷直流电机无位置传感器控制方法综述
无刷直流电机无位置传感器控制方法综述所谓的无位置传感器控制,正确的理解应该是无机械的位置传感器控制。在电机运转的过程中,作为逆变桥功率器件换向导通时序的转子位置信号仍然是需要的,只不过这种信号不再由位置传感器来提供,而应该由新的位置信号检测措施来代替,即以提高电路和控制的复杂性来降低电机的复杂性。所以,目前永磁无刷直流电机无位置传感器控制研究的核心和关键就是架构一转子位置信号检测线路,从软硬件两个方面来间接获得可靠的转子位置信号,借以触发导通相应的功率器件,驱动电机运转。 1.反电势过零点法(端电压法):基于反电动势过零点的转子位置检测方法是 在忽略永磁无刷直流电机电枢反应影响的前提下。通过检测断开相反电动势过零点。依次得到转子的六个关键位置信号。但是存在如下缺点:反电动势正比于转速,低速时不能通过检测端电压来获得换相信息故这种方法严重影响了电机的调速范围。使电机起动困难;续流二极管导通引起的电压脉冲可能覆盖反电动势信号。尤其是在高速、重载、或者绕组电气时间常数很大等情况下,续流二极管导通角度很大,可能使得反电动势法无法检测。 反电势过零检测法的改进策略:针对以上缺点,利用神经网络的非线性任意逼近特性, 提出一种基于神经元网络的电机相位补偿控制。首先由硬件电路获得有效的反电动势信息, 再利用BP 神经网络进行正确相位补偿, 实现无刷直流电机的无位置传感器控制, 获得了较好的效果[1]。还有一种采用人工神经元网络的永磁无刷直流电机反电势预测新方法, 采用神经元网络方法对永磁无刷直流电动机反电势波形准确预测的结果进一步用于电机动、静态特性的仿真或预测, 这将比假设电机反电势波形为理想正弦波或梯形波所进行的仿真更接近电机的实际运行结果。较之传统的路和场的计算方法, 达到了快速性和准确性的统一, 且由于神经元网络的自学习神经元网络成功训练后, 就可以用以预测所研究类型的永磁无刷直流电机的反电势波形[2]。 直接检测法,通过比较逆变器直流环中点电压和电机断开相绕组端电压的关
无刷直流电机的无位置传感器控制_0813
无位置传感器控制技术是无刷直流电机研究的热点之一,国内外相关研究已经取得阶段性成果。 在无刷直流电机工作过程中,各相绕组轮流交替导通,绕组表现为断续通电。在绕组不通电时,由于绕组线圈的蓄能释放,会产生感应电动势,该感应电动势的波形在绕组两端有可能被检测出来。利用感应电动势的一些特点,可有取代转子上的位置传感器功能,来得到需要的换相信息。由此,就出现了无位置传感器的无刷直流电动机。 尽管无位置传感器控制方式使得转子位置检测的精确度有所降低,但由于取消了位置传感器,电机的结构更加简单,安装更加方便,成本降低,可靠性进一步提高,在对体积和可靠性有要求的领域以及不适合安装位置传感器的场合,无位置传感器无刷直流电机应用广泛。 无位置传感器控制方式下的无刷直流电机具有可靠性高、抗干扰能力强等优点,同时在一定程度上克服了位置传感器安装不准确引起的换相转矩波动。 无位置传感器技术是从控制的硬件和软件两方面着手,以增加控制的复杂性换取电机结构复杂性的降低。 以采用120o电角度两两导通换相方式的三相桥式Y接无刷直流电机为例,讨论基于现代控制理论和智能算法的无刷直流电机无位置传感器控制方法。 转子位置间接检测法 目前无刷直流电机中主要采用电磁式、光电式、磁敏式等多种形式的位置传感器,但位置传感器的存在限制了无刷直流电机在某些特定场合的应用,主要体现在: 1、位置传感器可使电机系统的体积增大; 2、位置传感器使电机与控制系统之间导线增多,使系统易受外界干扰影响; 3、位置传感器在高温、高压和湿度较大等恶劣工况下运行时灵敏度变差,系统运行 可靠性降低 4、位置传感器对安装精度要求较高,机械安装偏差引起的换相不准确直接影响电机 的运行性能。 无位置传感器控制技术越来越受到重视,并得到了迅速发展。依据检测原理的不同,无刷直流电机无位置传感器控制方法主要包括反电势法、磁链法、电感法及人工智能法等。 反电势法 反电势法(感应电动势过零点检测法)目前是技术最成熟、应用最广泛的一种位置检测方法。该方法将检测获得的反电势过零点信号延迟30o电角度,得到6个离散的转子位 置信号,为逻辑开关电路提供正确的换相信息,进而实现无刷直流电机的无位置传感器控制。 无刷直流电机反电势过零点与换相时刻的对应关系如图所示,图中e A、e B、e C为相位互差120o电角度的三相梯形波反电势,Q1~Q6为一个周期内的6个换相点,分别滞后相应反电势过零点30o电角度。
无位置传感器直流无刷电机原理
无位置传感器直流无刷电机原理 位置传感器的直流无刷电机的换向主要靠位置传感器检测转子的位置,确 定功率开关器件的导通顺序来实现的,由于安装位置传感器增大了电机的体积, 同时安装位置传感器的位置精度要求比较高,带来组装的难度。 研究过程中发现,利用电子线路替代位置传感器检测电机在运行过程中产 生的反电动势来确定电机转子的位置,实现换向。从而出现了无位置传感器的 直流无刷电机,其原理框图如图3.1所示。 武汉理工大学硕士学位论文 图2-1无位置传感器无刷直流电机原理图 无位置传感器无刷直流电机(BLDCM)具有无换向火花、无无线电干扰、寿 命长、运行可靠、维护简便等特点,而且不必为一般无刷直流电机所必须的位 置传感器带来的对电机体积、成本、制造工艺的较高要求和抗干扰性差问题而 担忧,因此应用前景广阔。 由图2-1无刷直流电动机的运行原理图可知,当电机在运行
过程中,总有 一相绕组没有导通,此时可以在该相绕组的端口检测到该绕组产生反电动势, 该反电动势60度的电角度是连续的,由于电机的规格,制造工艺的差别,导致 相同电角度的反电动势值是不同,如要通过检测反电动势的数值来确定转子的 位置难度极大。因此必须找到该反电动势与转子位置的关系,才能确定转子的 位置。 由于BLDCM的气隙磁场、反电势、以及电流波型是非正弦的,因此采用 直交轴坐标变化不是很有效的分析方法。通常直接利用电机本身的相变量来建 立数学模型。假设三相绕组完全对称,磁路不饱和,不计涡流和磁滞损耗,忽 略齿槽相应,则三相绕组的电压平衡方程则可以表示为:根据电压方程得电机的等效电路图,如图2.2所示:
2.3.2反电势法电机控制的原理 无刷直流电机中,受定子绕组产生的合成磁场的作用,转子沿着一定的方 向转动。电机定子上放有电枢绕组,因此,转子一旦旋转,就会在空间形成导 体切割磁力线的情况,根据电磁感应定律可知,导体切割磁力线会在导体中产 生感应电热。所以,在转子旋转的时候就会在定子绕组中产生感应电势,即运 动电势,一般称为反电动势或反电势哺1。· 对于稀土永磁无刷直流电机,其气隙磁场波形可以为方波,也可以是梯形 波或正弦波,与永磁体形状、电机磁路结构和磁钢充磁等有关,由此把无刷直 流电机分为方波电机和正弦波电机。对于径向充磁结构,稀土永磁体直接面对 均匀气隙,由于稀土永磁体的取向性好,所以可以方便的获得具有较好方波形 状的气隙磁场,对于方波气隙磁场的电机,当定子绕组采用集中整距绕组,即 每极每槽数q=l时,定子绕组中感应的电势为梯形波,如图加
无刷直流电机工作原理详解
日期: 2014-05-28 / 作者: admin / 分类: 技术文章 1. 简介 本文要介绍电机种类中发展快速且应用广泛的无刷直流电机(以下简称BLDC)。BLDC被广泛的用于日常生活用具、汽车工业、航空、消费电子、医学电子、工业自动化等装置和仪表。顾名思义,BLDC不使用机械结构的换向电刷而直接使用电子换向器,在使用中BLDC相比有刷电机有许多的优点,比如: 能获得更好的扭矩转速特性; 高速动态响应; 高效率; 长寿命; 低噪声; 高转速。 另外,BLDC更优的扭矩和外形尺寸比使得它更适合用于对电机自身重量和大小比较敏感的场合。 2. BLDC结构和基本工作原理 BLDC属于同步电机的一种,这就意味着它的定子产生的磁场和转子产生的磁场是同频率的,所以BLDC并不会产生普通感应电机的频差现象。BLDC中又有单相、2相和3相电机的区别,相类型的不同决定其定子线圈绕组的多少。在这里我们将集中讨论的是应用最为 广泛的3相BLDC。 定子 BLDC定子是由许多硅钢片经过叠压和轴向冲压而成,每个冲槽内都有一定的线圈组成了绕组,可以参见图。从传统意义上讲,BLDC的定子和感应电机的定子有点类似,不过在定子绕组的分布上有一定的差别。大多数的BLDC定子有3个呈星行排列的绕组,每 个绕组又由许多内部结合的钢片按照一定的方式组成,偶数个绕组分布在定子的周围组成了偶数个磁极。 BLDC的定子绕组可以分为梯形和正弦两种绕组,它们的根本区别在于由于绕组的不同连接方式使它们产生的反电动势(反电动势的相关介绍请参加EMF一节)不同,分别呈现梯形和正弦波形,故用此命名了。梯形和正弦绕组产生的反电动势的波形图如图和图
无刷电机工作及控制原理(图解)
无刷电机工作及控制原理(图解) 左手定则,这个是电机转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用。 让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈。
让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。为什么要讲感生电动势呢?不知道大家有没有类似的经历,把电机的三相线合在一起,用手去转动电机会发现阻力非常大,这就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生和转动方向相反的力,大家就会感觉转动有很大的阻力。不信可以试试。 三相线分开,电机可以轻松转动 三相线合并,电机转动阻力非常大 右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
状态1 当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。 当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大。注意这里说的是“力矩”最大,而不是“力”最大。诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。补充一句,力矩是力与力臂的乘积。其中一个为零,乘积就为零了。 当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,
无刷电机控制器基本原理
无刷电机控制器基本原理 电动车采用的电机分有刷电机和无刷电机两种,由于无刷电机具有噪声低、寿命长的特点,因而在电动车中获得比较广泛应用。无刷电机的控制器要比有刷电机控制器复杂得多,在维修上有一定的难度,因此,本文从无刷控制器的原理入手介绍维修要点,以期对广大维修爱好者有所帮助。 基本原理 电动车无刷控制器主要由单片机主控电路、功率管前级驱动电路、电子换向器、霍尔信号检测电路、转把信号电路、欠电检测电路、限流/过流检测电路、刹车信号电路、限速电路、电源电路等部分组成,其原理框图如图1所示,下面介绍主要电路的工作原理。 1. 电子换向器 无刷电机与有刷电机的根本区别就在于无刷电机用电子换向器代替了有刷电机的机械换向器,因而控制方法也就大不相同,复杂程度明显提高。在无刷电机控制器中,用6个功率MOSFET管组成电子换向器,其结构如图2所示。图中MOSFET管VT1、VT4构成无刷电机A相绕组的桥臂,VT3、VT6 构成无刷电机B相绕组的桥臂,VT5、VT2构成无刷电机C相绕组的桥臂,在任何情况,同一桥臂的上下两管不能同时导通,否则要烧坏管子。 6只功率MOSFET管按一定要求顺次导通,就可实现无刷电机A、B、C 三相绕组的轮流通电,完成换相要求,电机正常运转。在电动车无刷电机控制器中,这6只功率管有二二通电方式和三三通电方式的运用,二二通电方式即每一瞬间有两只功率管同时通电,三三通电方式即每一瞬间有三只功率管同时通电。对于二二通电方式,功率管须按VT1、VT2;VT2、VT3;VT3、VT4;VT4、VT5;VT5、VT6;VT6、VT1;VT1、VT2??的通电顺序,电机才能正常运转。对于三三通电方式,功率管须按VT1、VT2、VT3;VT2、VT3、VT4;VT3、VT4、VT5;VT4、VT5、VT6;VT5、VT6、VT1; VT6、VT1、VT2;VT1、VT2 、VT3??的次序通电,电机才能正常运转。
(完整版)三相无刷直流电机系统结构及工作原理
三相无刷直流电机系统结构及工作原理 2.1电机的分类 电机按工作电源种类可分为: 1.直流电机: (1)有刷直流电机: ①永磁直流电机: ·稀土永磁直流电动机; ·铁氧体永磁直流电动机; ·铝镍钴永磁直流电动机; ②电磁直流电机: ·串励直流电动机; ·并励直流电动机; ·他励直流电动机; ·复励直流电动机; (2)无刷直流电机: 稀土永磁无刷直流电机; 2.交流电机: (1)单相电动机; (2)三相电动机。 2.2无刷直流电机特点 ·电压种类多:直流供电交流高低电压均不受限制。 ·容量范围大:标准品可达400Kw更大容量可以订制。 ·低频转矩大:低速可以达到理论转矩输出启动转矩可以达到两倍或更高。 ·高精度运转:不超过1 rpm.(不受电压变动或负载变动影响)。 ·高效率:所有调速装置中效率最高比传统直流电机高出5~30%。 ·调速范围:简易型/通用型(1:10)高精度型(1:100)伺服型。 ·过载容量高:负载转矩变动在200%以内输出转速不变。 ·体积弹性大:实际比异步电机尺寸小可以做成各种形状。 ·可设计成外转子电机(定子旋转)。 ·转速弹性大:可以几十转到十万转。 ·制动特性良好可以选用四象限运转。 ·可设计成全密闭型IP-54IP-65防爆型等均可。 ·允许高频度快速启动电机不发烫。 ·通用型产品安装尺寸与一般异步电机相同易于技术改造。
2.3无刷直流电机的组成 直流无刷电动机的结构如图2.1所示。它主要由电动机本体、位置传感器和电子开关线路三部分组成。电动机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。其定子绕组一般制成多相(三相、四相、无相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。 图2.1 直流无刷电动机的结构原理图 当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生的转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关电路,从而使定子各相绕组按一定顺序导通,定子相电流随转子位置转子位置的变化而按一定的次序换相。由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换相作用。如图2.2所示。 图2.2 无刷直流电动机基本结构图 因此,所谓直流无刷电动机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电动机以及位置传感器三者组成的“电动机系统”。其原理框图如图2.3所示。
无刷直流电机驱动器原理
无刷直流电机驱动器原理Newly compiled on November 23, 2020
图1 第2章 无刷直流电机的驱动原理 驱动方式的理论分析 一、主要器件MOSFET MOSFET 又称金属-氧化物半导体场效应晶体管,可分为N 型和P 型两种,又被称为NMOSFET 与PMOSFET 。 如图1所示,一块P 型硅半导体材料作衬底, 在其面上扩散了两个N 型区,再在上面覆盖一层二 氧化硅(SiO2)绝缘层,最后在N 区上方用腐蚀的方 法做成两个孔,用金属化的方法分别在绝缘层上及两个孔内做成三个电极:G(栅极)、S (源极)及D (漏极),如图所 示。在驱动器上用到的MOSFET 是在其上反并联一个二极管,该二极 管通常被称为寄生二极管。由于添加了二极管的缘故,从而使其没有 了反向电压阻断的能力。一般使用时在栅源极间施加一个-5V 的反向偏执电压,目的是为了保证是器件导通,噪声电压必须阈值门控(栅极)电压和负偏置电压之和。 MOSFET 的使用方法和三极管的使用方法几乎类似,都是采用小电流的方式来控制大电流,这在模拟电路中经常用到。如图2所示,在无刷电机驱动器中使用MOSFET 主要是在MOSFET 的栅源极施加一个寄生二极管。 二、单相半波逆变器原理 如图3所示是单相半波逆变器的原理图。对其 工作状态分析如下: 图2 图2
第一个工作状态,v1导通,负载电压等于Ud/2,从而使负载电流与电压同向。 第二个工作状态,v2关短后,负载电流流向vd2,使得负载上的电压变为-Ud/2。但随着时间的推移会使负载的电流最终变为0。 第三个工作状态,v2导通,使得负载中出现了负电压和负电流。 第四个工作状态,v2关断造成vd2正向偏置,得负载电压变为Ud/2。 如果电压为横坐标u,电流为竖坐标i的话,那么通过上面四个状态就可以是电流和电压在四个象限内轮流工作。因此,采用一定的方法通过控制v1和v2的导通时间就可以达到控制负载上电流和电压按照一定的频率来轮换着工作。 但是上面的变换有一些缺点。例如,在任何时刻加载在负载上的电压都是全部电压的一半。假如咋某个时刻对于功率额定的器件,电压减半后会使电流变为原来的两倍,同时又欧姆定律可知这时的发热会变为原来的次方倍。这对于器件来说会造成更大的风险。另外电压只能在最大电压的一半,没办法为0V,那就会是器件造成更大的波纹度。 三、三相逆变电路 原理如图所示 由单项桥的原理来分析三相桥电路。每个负载由两个上下桥臂共同连接,中间是连接在一起的没有中心线的 星型连接方式。中点电压 有桥臂上下开关器件的开 关状态所决定。假定每一 相的桥臂在任意给定时刻 均有一个开关器件的导
无刷电机电调电路图
电动自行车作为一种环保的交通工具已得到了广泛使用。直流无刷电机及控制器是电动自行车中的关键部件,其性能决定了整个系统的电能转换效率。控制器根据霍尔传感器输出信号,驱动3相全桥电路,实现对直流无刷电机的控制,因此霍尔信号的准确性及换相的实时性会直接影响电机的性能。在现有电动自行车控制器方案中,霍尔传感器信号的采集均采用软件扫描形式进行,换相操作也通过软件处理,换相误差大,实时性差,尤其对中高速电机更为明显。而英飞凌公司的XC866/846可以支持硬件霍尔信号采集、换相操作,且无需额外电路即可实现同步整流控制,单片机利用率高,电机控制性能好。 直流无刷电机控制 传统的直流无刷电机采用梯形波驱动方式,系统结构框图如图1a所示,MCU根据三个霍尔传感器信号调制PWM输出,PWM驱动波形如图1b所示。由于在这种控制方式下,电机端电压波形为梯形波,因此也称为梯形波控制。从图1中可以看出,PWM输出存在6种状态,对于每种状态,逆变桥的6个功率管中仅有2个工作,例如,当状态等于5时,CC60和COUT62对应通道开通。 图1:直流无刷电机控制拓扑结构及PWM驱动信号波形。 在PWM开通和关断期间,逆变桥内的电流如图2所示(以状态5为例)。当PWM开通时,电流经过M1,经过电机及M6返回电源。当PWM关闭时,续流电流经由D2(M2中的寄生二极管)、电机相线和M6返回电源。由于二极管D2的导通压降为0.6~1V左右,因此续流电流在这个二极管上会产生较大的损耗,当电机负载大、续流电流大的时候,损耗问题更加严重,将影响逆变器效率。
图2:简单梯形波控制中的电流示意图。 为减少续流电流在寄生二极管上产生的损耗,在一些应用中使用MOSFET作为逆变元件。由于MOFSET具有导通阻抗低、电流可以双向流动的特点,在M1关断,进入续流阶段时,开通M 2,使续流电流流经M2,由于MOSFET的导通阻抗极低,损耗很小,例如当续流电流为10A,MOSFET导通电阻10mΩ,二极管D2压降0.7v时,若续流电流流经D2时产生损耗为7W,而流经MOSFET时产生损耗仅为1W,因此使用这种控制方式可以减少损耗,提高逆变器的效率,在续流电流大的情况下效果更加明显。这种控制方式亦称为同步整流,电流示意图如图3a。由于MOSFET的上、下管需要交替开通,为避免直通的危险,需要添加死区时间。采用同步整流控制时,6路PWM的驱动波形如图3b所示。 图3:同步整流控制中的PWM驱动及电流示意图。 CCU6E霍尔传感器模式 捕获/比较单元6(CCU6E)是英飞凌的8/16位单片机中包含的专用电机驱动单元,内部结构如图4所示。CCU6E包含两个专用16位定时器(T12,T13),可以产生各种PWM调制信号,支持交流电机、直流无刷电机、开关磁阻电机等多种电机控制,结构框图如图4所示。CCU6E还提供支持块交换和多相电机控制的多通道模式,并集成专用霍尔传感器模式,可在使用极少CPU 资源的前提下实现直流无刷电机的控制。