重庆理工大学机械原理课程设计说明书牛头刨床设计说明书2013
机械原理课程设计说明书牛头刨床设计说明书
班级:
学号:
姓名:
组别:
指导老师:
目录
一概论 (3)
1、设计目的 (3)
2、设计任务 (3)
3. 扭头刨床机构简介及工作原理 (3)
二导杆机构的运动分析 (4)
1、刨头位移线图 (11)
2、速度分析 (6)
三凸轮机构设计 (11)
1、凸轮设计要求 (11)
2、凸轮机构从动件位移、速度、加速度线图 (13)
四齿轮机构设计 (14)
1、齿轮设计要求 (14)
2、齿轮计算 (15)
3、绘制齿轮啮合区图 (18)
五课程设计评价与分析
六课程设计的心得体会 (18)
七课程设计参考文献 (20)
一、概论
1.1机械原理课程设计目的
机械原理课程设计是培养学生掌握机械系统运动方案设计能力的技术基础课程,它是机械原理课程学习过程中的一个重要实践环节。机械原理课程设计目的在于巩固和加深所学的理论知识,培养学生独立解决有关本课程实际问题的能力,使学生对于常用机构(连杆机构、凸轮机构和齿轮机构)设计和运动分析有比较完整的认识,。以及熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,进一步提高设计计算和解决工程技术问题的能力。
1.2机械原理课程设计任务及要求
机械原理课程设计任务是对主体机构进行设计和运动分析,并根据给定机器的工作要求,在此基础上绘制凸轮、齿轮;或对各机构进行运动分析。要求:1、学生根据设计任务在规定时间内完成1# 设计图一张,3# 设计图两张,设计说明书一份(20页左右)。2、要求计算正确、作图规范,图面整洁,说明书步骤清晰有条理,书写端正。
1.3牛头刨床机构简介及工作原理
1.3.1扭头刨床简介
牛头刨床是刨削类机床中应用较广的一种。它适合刨削长度不超过1000mm的中、小型零件。牛头刨床的主运动为电动机→变速机构→摇杆机构→滑枕往复运动;牛头刨床的进给运动为电动机→变速机构→棘轮进给机构→工作台横向进给运动。
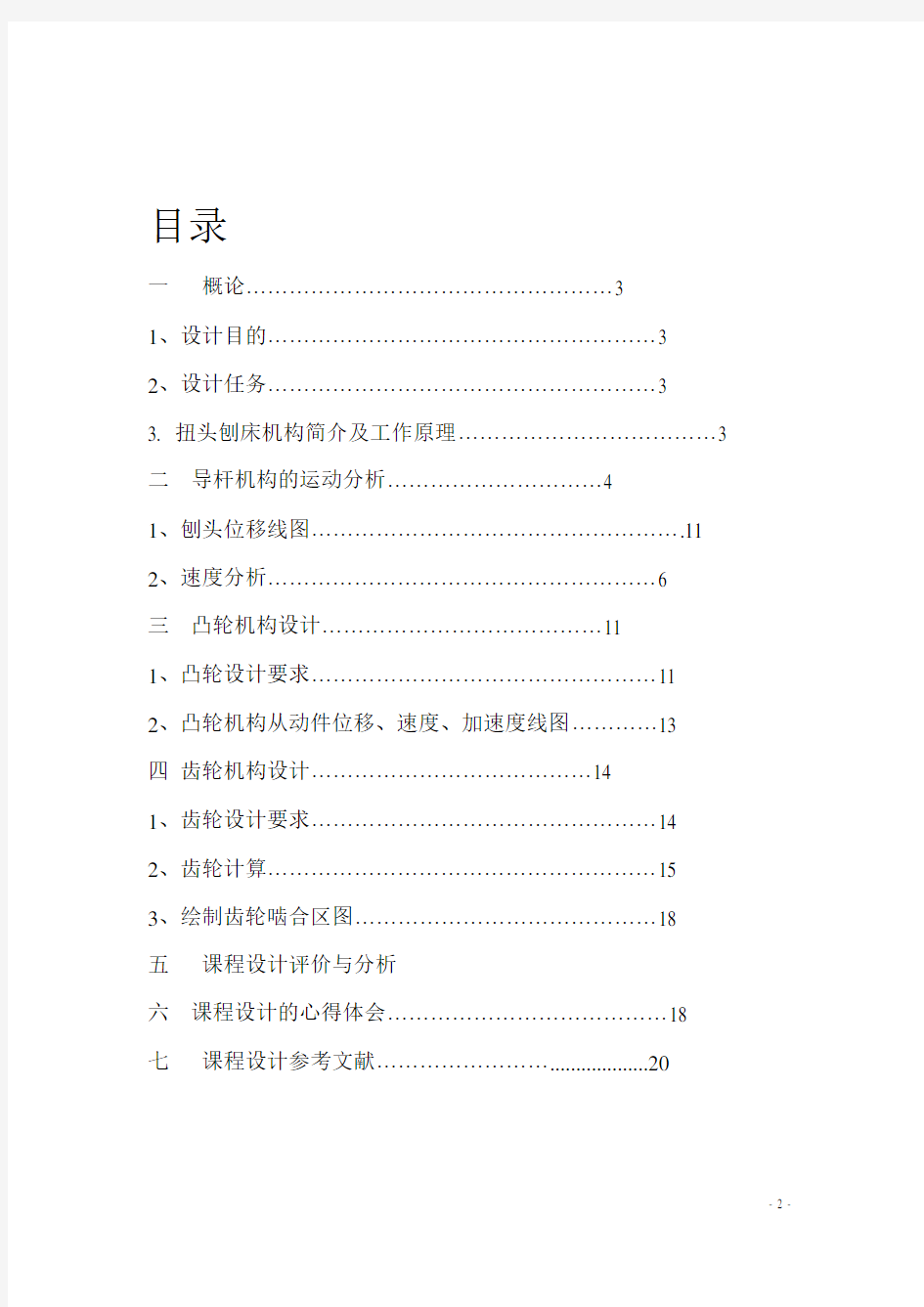
1—横梁2—进刀机构3—变速机构4—摆杆机构5—床身6—滑枕7—刀架8—工作台
牛头刨床的主要组成部份及作用如下:
(1)床身床身5用于支承和连接刨床的各部件,其顶面导轨供滑枕6作往复运动,侧面导轨供横梁1和工作台8升降。床身内部装有传动机构。
(2)滑枕用于带动刨刀作直线往复运动(即主运动),其前端装有刀架7。(3)刀架刀架用以夹持刨刀,并可作垂直或斜向进给。扳转刀架手柄9时,滑板7即可沿转盘6上的导轨带动刨刀作垂直进给。滑板需斜向进给时,松开转盘6上的螺母,将转盘扳转所需角度即可。滑板7上装有可偏转的刀座1,刀座中的抬刀板2可绕轴5向上转动。刨刀安装在刀夹3上。在返回行程时,刨刀绕轴5自由上抬,可减少刀具后刀面与工件的摩擦。
1—刀座2—抬刀板3—刀夹4—紧固螺钉5—轴6—刻度转盘7—滑板8—刻度环9—手柄
(4)工作台用于安装工件,可随横梁上下调整,并可沿横梁导轨横向移动或横向间歇进给。
(5)横梁:可带动工作台沿床身垂直导轨作升降运动,其空腔内装有工作台进给丝杆。
1.3.2扭头刨床工作原理
图一
牛头刨床是一种用于平面切削加工的机床,如图一,电动机经皮带和
齿轮传动,带动曲柄2 和固接在其上的凸轮8。刨床工作时,由导杆机构2-3-4-5-6带动滑枕6和刨刀7作往复运动。要求工作行程时,滑枕6应速度较低,且近似等速移动,而空回行程时,滑枕具有较高速度,实现快速返回。另外,齿轮等速转动时,通过四杆机构带动棘轮G转动。棘轮与丝杆相连,实现自动进刀。刨床机构在一个工作循环内,主轴速度波动很大,为此,常采用飞轮调整速度波动。
二、牛头刨床导杆机构的运动分析
2.1牛头刨床导杆机构设计已知条件
符号
n2 K H Lo2o4 LBC/LO4B r/min mm mm
1 60 1.5 480 550 0.25
2.2导杆机构设计要求
导杆机构设计应根据连杆5传力给滑枕的最有利条件确定摆动导杆长度和滑枕导路X—X的位置,即曲柄和摆杆转动副连线应垂直于导路X—X,且X—X应位于摆杆端点所画圆弧高的平分线上。作机构运动位置图。以滑枕6的左极限位置时曲柄的位置作为起始点1,每隔30°取一个位置,共12个位置。每个小组
的每一个人分配liang个位置(特殊位置除外)作运动分析,绘速度多边形.
以刨头左极限点为基点,收集12个位置测量出的位移,绘出刨头位移线图。分析连杆机构的结构组成(拆分杆组),并说明该机构的级别。
2.2.3(1)选取曲柄特定的位置(xxx)作机构运动简图
(2)拆分杆组
该六杆机构可看成由一个Ⅰ级基本杆组、两个I级基本杆组组成的,即可将机构分解成图示三部分。
2.4测得各个位置刨头位移如下表所示,并绘出刨头位移线图
2.5速度分析
(1)确定各杆件的长度:
360
1
K 1K 180=+-=
)(θ
30
π
ωn =
=6.28rad/s LO2A=170.0mm L04B=776.7mm LBC=194.2mm (2)速度分析:
位置 1 2 3 4 5 6 7 8 9 10 11 12 位移 0
24 84 165 285 342 441 474 452 345
171
36
选取速度比例尺μ=0.05(m ∕s )∕mm
V
V
V L V A 1A 2
A 2
A 1
O 2A
1
A 1
1.66m/s
+===ω
大小:1.66 ? ? 方向:⊥O2A ⊥O4A ∥O4B VA2=1.66*sin6.7=0.194m/s W2=VA2/O4A=0.65rad/s VB=W2*O4B=0.534m/s VC=VB+VCB 大小: ? 0.534 ? 方向:水平 ⊥O4B ⊥CB 量得VC=0.45m/s
三、凸轮机构设计
3.1凸轮机构设计已知条件
本组选择第一种方案
3.2凸轮设计要求
1根据牛头刨床导杆机构结构选定凸轮轴径(25~40mm);
2凸轮基圆直径大于或等于轴径的(1.6~2)倍;
3凸轮滚子半径等于基圆半径的(0.1~0.5)倍;
4绘制凸机构从动件位移、速度、加速度线图
5根据反转法原理绘制凸轮轮廓。
根据设计要求,本小组取轴径为30mm,基圆直径为轴径的2倍,凸轮滚子半径为基圆半径的0.1倍。
3.3、根据以上数据及运动规律得运动方程如下
Ψ=h[(б∕б0) -sin(2лб∕б0)( 2л)]
每隔十度进行角位移求解带入得
Ψ1=20°[(10∕120) -sin(2л×10∕120)( 2л) ]
Ψ2=20°[(20∕120) -sin(2л×20∕120)( 2л) ]
3.4、(1)绘制凸轮廓线图
(2)绘制凸轮机构从动件位移线图
(3)、绘制凸轮机构从动件速度线图
(4)、绘制凸轮机构从动件加速度线图
四齿轮机构设计
4.1 齿轮机构设计已知条件
方案参数Z1 Z2 m(㎜) α(°)
1 15 60 10 20
4.2齿轮设计要求
要求齿轮不根切,且实际中心距的尾数取为0或5,设计该传动并完成计算和验算;绘制齿轮啮合区图(可以不绘制齿廓形状),标出基圆、齿顶圆、节圆、啮合角、啮合起始点B2、B1和啮合极限点N1、N2,并注明单齿啮合区和双齿啮合区;用图上量取的实际啮合线段B2B1确定重合度,并与公式计算值进行比较。
4.3齿轮数据计算及校核
计算过程:
已知:Z1=15 Z2=60 m=10 ɑ=20° h a*=1 c*=0.25 分度圆:d1=mz1=150mm d2=mz2=600mm
标准中心距: a=m(z1+z2)/2=375mm
实际中心距:a’=375mm
啮合角:ɑ’=ɑ=20°
变位系数:x1+x2=0 x1=(17-z1)/17=0.118 x2=-0.118
中心距变动系数:y=(ɑ’-ɑ)/m=0
齿顶高降低系数:Δy=(x1+x2)+y=0
节圆:d1’=d1cosɑ/ cosɑ’=150mm
d2’=d2cosɑ/ cosɑ’=600mm
齿顶圆:da1=d1+2ha*= d1+2(ha*+x1-Δy)m=172.36mm
da2=d2+2ha*= d2+2(ha*+x2-Δy)m=617.64mm
齿根圆:d f1=d1-2h f1=d1-2(ha*+c*-x1)m=127.36mm
d f2=d2-2h f2=d2-2(ha*+c*-x2)m=572.64mm
基圆:d b1= d1cosɑ=61.21mm
d b2= d2cosɑ=244.84mm
ɑa1=arcos(r1cos/r a1)=35.14°
ɑa2=arcos(r2cos/r a2)=24.10°
S1=(л/2+2x1tana)m=16.6mm
S2=(л/2+2x2tana)m14.84mm
Sa1=s1*ra1/r1-2ra1(invaa1-inva)=5.62mm
Sa2=s2*ra2/r2-2ra2(invaa2-inva)=8.03mm
Sa1>0.4m=4mm
Sa2>0.4m=4mm
所以齿轮合格。
理论重合度:XXX=[z1(tanɑa1-tanɑ’)+Z2(tanɑa2-tanɑ’)] =1.67
由作图得:B1B2=44.8mm
P b=Pcosɑ=лmcosɑ=29.4mm
=B1B2/ P b=1.52>1
相对误差η=|εα-εα’|/εα=8.9% 综上,齿轮矫正合格。
4.4绘制齿轮啮合图
五、课程设计分析及其评价
1,机构具有确定运动,F=3*5-(2*7+1)=1,曲柄为机构原动件。
2,通过曲柄带动摆动导杆机构和滑块机构使刨刀往复移动,实现切削
功能,能满足功能要求.且滑块行程可以根据杆长任意调整;
3,工作性能, 工作行程中,刨刀速度较慢,变化平缓符合切削要求, 摆动导杆机构使其具有急回作用,可满足任意行程速比系数K的要求;4,传递性能, 机构传动角恒为90度,传动性能好,能承受较大的载荷,机构运动链较长,传动间隙较大;
5,动力性能,传动平稳,冲击震动较小.
6,结构合理性,结构简单合理,尺寸和重量也较小,制造和维修也较易. 7,经济性,无特殊工艺和设备要求,成本较低.
六.课程设计心得体会
通过一段时间的设计,让我对所学知识得到了更深的理解,也学会了运用各种资料、工具,体会到了同伴之间的密切合作的重要性等等。同时这之间的种种工作也离不开老师的热情指导,在此表示深深的谢意。
首先,对机械原理这门课程有了更深入的了解.平时的只停留在一个初等的感性认识水平,没有真正的理解透所学的具体原理的应用问题,但在自己做设计过程中老在问为什么,如何解决,通过这样的想法,是自己对自己所学的理论有了深入的理解.在设计过程中,如何才能
把所学的理论运用到实际中,这才是我们学以所获,学以致用的真正
宗旨,这也是当我们从这个专业毕业后所必需具有的能力,这也更是
从学到时间的过程,才能为自己在以后的工作中游刃有余,才能为机
械工业的发展尽绵薄之力.
其次对所学的专业课产生了很大的兴趣.在做设计的过程中,发现机
械的很多东西渗透在我们生活的方方面面,小到钟表,大到航天器,都用到了机械的相关内容。这也给自己很大的学习范围和任务,更给了自己很大的发展空间和兴趣的培养。
同时,我也深深体会到,过而能改,善莫大焉。在课程设计过程中,我们不断发现错误,不断改正,不断领悟,不断获取。最终的检测调试环节,本身就是在践行“过而能改,善莫大焉”的知行观。这次课程设计终于顺利完成了,在设计中遇到了很多问题,最后在老师的指导下,终于游逆而解。在今后社会的发展和学习实践过程中,一定要不懈努力,不能遇到问题就想到要退缩,一定要不厌其烦的发现问题所在,然后一一进行解决,只有这样,才能成功的做成想做的事,才能在今后的道路上劈荆斩棘,而不是知难而退,那样永远不可能收获成功,收获喜悦,也永远不可能得到社会及他人对你的认可!
课程设计诚然是一门专业课,给我很多专业知识以及专业技能上的提升,同时又是一门讲道课,一门辩思课,给了我许多道,给了我很多思,给了我莫大的空间。同时,设计让我感触很深。使我对抽象的理论有了具体的认识。
最后对团队的合作有了更深的体会。每个人不可能方方面面都会,这就需要团队组员各自发挥自己的优点,说出各自的想法,取长补短,这样才能从别人身上学到自己所缺的能力和品质,在现代的企业合作中,团队合作精神是很重要的,各个产品的开发都需要很多人倾注心血,这样才能是企业有长远的发展。团结就是力量,只有互相之间默契融洽的配合才能换来最终完美的结果。
此次设计也让我明白了思路即出路,有什么不懂不明白的地方要及时请教或上网查询,只要认真钻研,动脑思考,动手实践,就没有弄不懂的知识,收获颇丰。
虽然这次设计已告一段落,但是我知道学海无涯、学无止境,这是一个结尾,同时也只是一个开始。今后,我会以更饱满的热情投入到今后的学习生活中,做一个不断探索,勇于创新的大学生。
七、参考文献
[1] 孙恒,陈作模。机械原理(第七版)。北京:高等教育出版社,2006.5
[2] 李笑刘福利陈明。机械原理课程设计指导书(试用稿)。哈尔滨:哈尔滨工业大学出版社,2004.7
[3] 牛鸣歧王保民王振甫。机械原理课程设计手册. 重庆:重庆大学出版社,2001
[4]王知行李瑰贤. 机械原理电算程序设计. 哈尔滨,哈尔滨工业大学出版社.2003
[5] 孟宪源姜琪. 机构构型与应用. 北京:机械工业出版社,2003
[6] 申永胜. 机械原理教程. 北京:清华大学出版社,1999
[7 ] 陈明等. 机械系统方案设计参考图册
牛头刨床机构设计.
机械原理设计说明书 设计题目:牛头刨床机构设计 学生:汪在福 班级:铁车二班 学号:20116473 指导老师:何俊
机械原理设计说明书 设计题目:牛头刨床机构设计 学生姓名汪在福 班级铁车二班 学号20116473 一、设计题目简介 牛头刨床是用于加工中小尺寸的平面或直槽的金属切削机床,多用于单件或小批量生产。 为了适用不同材料和不同尺寸工件的粗、精加工,要求主执行构件—刨刀能以数种不同速度、不同行程和不同起始位置作水平往复直线移动,且切削时刨刀的移动速度低于空行程速度,即刨刀具有急回现象。刨刀可随小刀架作不同进给量的垂直进给;安装工件的工作台应具有不同进给量的横向进给,以完成平面的加工,工作台还应具有升降功能,以适应不同高度的工件加 二、设计数据与要求
电动机轴与曲柄轴2平行,刨刀刀刃D点与铰链点C的垂直距离为50mm,使用寿命10年,每日一班制工作,载荷有轻微冲击。允许曲柄2转速偏差为±5%。要求导杆机构的最大压力角应为最小值;凸轮机构的最大压力角应在许用值[α]之内,摆动从动件9的升、回程运动规律均为等加速等减速运动。执行构件的传动效率按0.95计算,系统有过载保护。按小批量生产规模设计 回 6 三、设计任务 1、根据牛头刨床的工作原理,拟定2~3个其他形式的执行机构(连杆机构),并对这些机构进行分析对比。 2、根据给定的数据确定机构的运动尺寸。并将设计结果和步骤写在设计说明书中。 3、用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。。 4、导杆机构的动态静力分析。通过参数化的建模,细化机构仿真模型,并给系统加力,写出外加力的参数化函数语句,打印外加力的曲线,并求出最大平衡力矩和功率。 5、凸轮机构设计。根据所给定的已知参数,确定凸轮的基本尺寸(基圆半径ro、机架lO2O9和滚子半径rr),并将运算结果写在说明书中。将凸轮机构放在直角坐标系下,在软件中建模,画出凸轮机构的实际廓线,打印出从动件运动规律和凸轮机构仿真模型。 6、编写设计说明书一份。应包括设计任务、设计参数、设计计算过程等。 四.设计过程 (一)方案选择与确定 方案一:如图(1)采用双曲柄六杆机构ABCD,曲柄AB和CD不等长。
机械原理课程设计-牛头刨床(完整图纸)
机械原理课程设计说明书 系部名称: 机电系 专业班级: 04机制三班 姓名: 学号: 0405110057 目录
概述 (3) 设计项目...............................1.设计题目 (4) 2.机构简介 (4) 3.设计数据 (4) 设计内容...............................1.导杆机构的设计 (5) 2.凸轮机构的设计 (12) 3.齿轮机构的设计 (17) 设计体会 (20) 参考文献 (21) 附图····························· 概述
. 一、机构机械原理课程设计的目的: 机械原理课程设计是高等工业学校机械类专业学生第一次较全面的 机械运动学和动力学分析与设计的训练,是本课程的一个重要实践环节。其基本目的在于: (1)进一步加深学生所学的理论知识,培养学生独立解决有关本课程实际问题的能力。 (2)使学生对于机械运动学和动力学的分析设计有一较完整的概念。 (3)使学生得到拟定运动方案的训练,并具有初步设计选型与组合以及确定传动方案的能力。 (4)通过课程设计,进一步提高学生运算、绘图、表达、运用计算机和查阅技术资料的能力。 二、机械原理课程设计的任务: 机械原理课程设计的任务是对机械的主体机构(连杆机构、凸轮机构、齿轮机构以及其他机构)进行设计和运动分析、动态静力分析,并根据给定机器的工作要求,在此基础上设计凸轮、齿轮;或对各机构进行运动分析。要求学生根据设计任务,绘制必要的图纸,编写说明书。 三、械原理课程设计的方法: 机械原理课程设计的方法大致可分为图解法和解析法两种。图解法几何概念较清晰、直观;解析法精度较高。根据教学大纲的要求,本设计主要应用图解法进行设计。 [设计名称]牛头刨床 一.机构简介: 机构简图如下所示:
牛头刨床设计 机械原理课程设计
中南大学 机械原理课程设计 ——说明书 班级:机械1007 姓名:台永丰 学号:0806100904 指导老师:何竞飞 分组:Ⅵ方案 题目:牛头刨床
目录 第1章 1.1设计题目........................................ (3) 1.2机构简介 (3) 1.3设计任务 (4) 第2章 2.1电动机的选择 (5) 2.2齿轮变速装置设计 (5) 2.3导杆机构尺寸设计 (6) 2.4机构的运动分析 (7) 2.5机构的动态静力分析 (16) 2.6速度波动的调节与飞轮设计 (19) 第3章 3.1体会心得 (22) 参考文献 (23)
第1章 1.1设计题目 牛头刨床 1.2机构简介 牛头刨床是一种用于平面切削加工的机床,如图1-1 a。电动机经一级带传动和二级齿轮传动驱动执行机构,使刨头6和刨刀7作往复直线运动。刨头右行时,刨刀进行切削加工,称为工作行程,要求速度较低并且均匀。刨头左行时,刨刀不进行切削,称为空回行程,要求速度快以节省时间。因此刨头在整个运动循环中受力变化大,对主轴(曲柄2)匀速运转有很大影响,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减小电动机功率。同时,要求刨刀不进行切削的过程中,工件随工作台实现自动进给运动。 图1-1
1.3设计任务 (1)电动机的选择; (2)设计齿轮变速装置; (3)设计导杆机构; (4)设计刨程及其位置的调节方法; (5)机构运动分析; (6)机构的动态静力分析; (7)速度波动的调节与飞轮设计。 图1-2
第2章2.1电动机的选择 电动机转速选择1440r.p.m 2.2齿轮变速装置设计 如图1-2 i13H=n1?n H n3?n5=?z2z3 z1z2 ……………………………………[2-1] * 式中i——转速比 n——转速 z——齿数 i45=n4 n3=?z5 z4 …………………………………………[2-2] i67=n6 n7=?z7 z6 …………………………………………[2-3] 联立以上各式,并令n1n H n H n7 =24,可选取z1=50,z2=50,z3=150,z4=55,z5=78 可得各齿轮数据
牛头刨床主传动机构设计
目录 一、牛头刨床主传动机构设计 二、机械系统运动方案的拟定 三、所选机构的运动分析与设计 四、所选机构的动力分析与设计 五、设计原理说明 六、参考文献 七、心得体会
一课程设计题目 1题目:牛头刨床主传动机构设计 2设计数据: 内容导杆机构的运动分析 符号n2L O2O4L O2A L o4B L BC L o4s4xS6yS6单位r/min mm 方案Ⅱ64 350 90 580 0.3L o4B0.5 L o4B200 50 3课程设计要求 牛头刨床主传动机构的设计,要求将电动机 输出的旋转运动动转换为刨刀的直线运动。整个 行程中,工作行程要求速度较低,以提高切削质量。工作行程结束后,为提高工作效率,需要有 急回运动,整个机构要求简洁实用。 二机械系统运动方案的拟定 方案一: 电动机输出转速经变速箱变速到达齿轮带 动齿轮转动,同时通过齿轮轴带动圆弧齿轮转动,工作行程结束或由附属的弹簧机构将刨刀迅速拉 回工作开始位置。
评价:该机构为齿轮传动机构,传动精确稳定,机会性较好,但工作冲击较大,且圆弧齿轮与齿条初始咬合时,冲击较大因而机构寿命短,维修保养费用高。 方案二: 电动机带曲柄,曲柄带动连杆,连杆带动滑块直线运动。 评价:该方案机构设计简单,传动性能价差,不宜承受较大的工作阻力,急回性能不够好,效率较低不宜选用。 方案三: 电动机带动曲柄,曲柄带动滑块移动滑块带
动摇杆摆动,摇杆带动另一滑块直线运动。 评价:该方案的工作性能相当好,无论从传动性还是急回性。精确性上相比较,都很合适。 三所选机构的运动分析与设计
取1和8为工作行程起点和终点所对应的曲柄位置,1’和7’为切削起点和终点所对应的曲柄位置,其余2、3…12等,是由位置1起,顺ω2方向将曲柄圆作12等分的位置(如上图)。 取第Ⅱ方案的第4位置和第10位置(如上图)速度分析 以速度比例尺:(0.01m/s)/mm和加速度比例尺:( 0.01m/s2)/mm用相对运动的图解法作该两个位 的置的速度多边形和加速度多边形如下图,
重庆理工大学机械原理课程设计任务书
机械原理课程设计任务书 一、题目:牛头刨床机构设计 牛头刨床简介 牛头刨床是一种用于平面切削加工的机床,如图1,电动机经皮带和齿轮传动,带动曲柄2 和固接在其上的凸轮8。刨床工作时,由导杆机构2-3-4-5-6带动滑枕6和刨刀7作往复运动。要求工作行程时,滑枕6应速度较低,且近似等速移动,而空回行程时,滑枕具有较高速度,实现快速返回。 另外,齿轮等速转动时,通过四杆机构带动棘轮G转动。棘轮与丝杆相连,实现自动进刀。 图1 二、题目数据 1、牛头刨床导杆机构设计及运动分析(表1) 表1导杆机构设计及运动分析
2.凸轮机构设计(表2) 3、齿轮机构设计(表3) 图2 符号说明: 2n ——曲柄A O 2转速(与齿轮、凸轮、飞轮为同一运动单元) K ——行程速比系数
H ——滑枕6冲程 1Z 、2Z ——齿轮1、2的齿数 m 、α——齿轮1、2的模数和压力角 max ψ——摆杆O 9 D 最大摆角 ][α、]['α——凸轮推程、回程许用压力角 01δ、02δ——凸轮推程、回程运动角 3δ——凸轮远休止角 三、设计要求 1、牛头刨床导杆机构的设计和分析(1号图一张) (1)、作机构运动简图。曲柄位置如图2,以滑枕6的左极限位置时曲柄A O 2 的位置作为起始点1,每隔 30取一个位置,共12个位置。全班分为四个小组,每组9~10人。初始位置每人必画,其余每人分配一个位置,并按该位置绘制机构简图。
(2)、 B O L 4长度和滑枕导路X ——X 的位置,应根据连杆5传力给滑枕的最有利
条件确定,即轴线42O O 应垂直于导路X ——X ,且X ——X 应位于点所画圆弧高的平分线上。 (3)、以小组为单位,比较每个同学确定的各杆长度,最后,按统一的合理尺寸作机构运动简图。 (4)、收集12个位置测量出的位移,以实线绘出位移线图。 (5)、分析连杆机构的结构组成(拆分杆组) 2、凸轮机构设计(2号图一张) ? 根据牛头刨床导杆机构结构选定凸轮轴径(范围25~40mm )。 ? 凸轮基圆直径大于或等于轴径的(1.6——2)倍 。 ? 凸轮滚子半径等于基圆半径的(0.1——0.5)倍 。 ? 绘制凸轮位移、速度、加速度曲线 ? 绘制凸轮轮廓。 3、齿轮机构设计(2号图一张) ? 要求齿轮不根切,且实际中心距a 的尾数为0或5。设计齿轮传动, ? 参照第八版教材P207图10-20(七版教材P185图10-18), 绘制齿轮啮合 区图(不用绘制齿廓),一定要注明单齿啮合区和双齿啮合区。 [附录] 说明书技术规范 (1) 开本格式:A4 (2) 内容顺序安排格式 首 页: 机械原理课程设计设计任务书 次 页: 目录 主体正文: 机械原理课程设计计算说明书 末 页: 设计参考文献 主体正文的内容可按表1所列设计工作内容顺序编排,标题应按实际设计内容贴切编写. 设计计算说明书除系统地说明设计过程中所考虑的问题和全部的计算项目、结论数据外,还应具体阐明设计思想,论证设计的合理性。同时还应注意下列事项: 1)、计算正确完整,文字简洁通顺,书写整齐清晰。对计算内容只须写出计算公式,代入有关数据,直接得出最后结果。说明书中还应包括与文字叙述计算有关的必要简图。 2)、说明书中所引用的重要计算公式和数据,应注明出处(注出参考资料的统一编号)。 3)、对设计计算与分析的每一重要单元内容均应写出简明的结论。
牛头刨床课程设计方案
海南大学 机械原理课程设计说明书 设计题目:牛头刨床 小组成员: 20110504310007 20110504310006 专业班级:11级交通运输(一)班 指导老师:陈致水 2013年6月26日
目录 一、概述........................................................... (2) 二、机构简介与设计数据 (3) 三、课程设计的内容和步骤……………………………… ..4 四、参考文献 (11) 五、设计小结 (12)
一、概述 1.课程设计的题目 牛头刨床 2.课程设计的任务和目的 1)任务: a.导杆机构进行运动分析; b.导杆机构进行动态静力分析; c.齿轮机构设计; 2)目的:机械原理课程设计是培养学生掌握机械系统运动方案设计能力的技术基础课程,它是机械原理课程学习过程中的一个重要实践环节。其目的是以机械原理课程的学习为基础,进一步巩固和加深所学的基本理论、基本概念和基本知识,培养学生分析和解决与本课程有关的具体机械所涉及的实际问题的能力,使学生熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,并进一步提高计算、分析,计算机辅助设计、绘图以及查阅和使用文献的综合能力。 .3.课程设计的要求 牛头刨床的主传动的从动机构是刨头,在设计主传动机构时,要满足所设计的机构要能使牛头刨床正常的运转,同时设计的主传动机构的行程要有急回运动的特性,以及很好的动力特性。尽量是设计的结构简单,实用,能很好的实现传动功能。
二.机构简介与设计数据 2.1机构简介 牛头刨床是一种用于平面切削加工的机床。电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。刨头右行时,刨刀进行切削,称工作切削。此时要求速度较低且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。为此刨床采用急回作用得导杆机构。刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮机构带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。 2.2设计数据
毕业设计(论文)机器人行走机构 文献综述
重庆理工大学 毕业设计(论文)文献综述题目机器人行走机构设计 二级学院重庆汽车学院 专业机械设计制造及其自动化班级 姓名学号 指导教师系主任 时间
评阅老师签字:
机器人行走机构 吴俊 摘要:行走机器人是机器人学中的一个重要分支。行走机构可以是轮式的、履带式的 和腿式的等,能适应地上、地下、水中、空中、宇宙等作业环境的各种移动机构。本 文从国内外的研究状况着手,介绍了行走机器人的发展历史,研究现状和发展趋势。本文还介绍了国内最新的研究成果。 关键字:机器人行走机构发展现状应用 Keyword:robot travelling mechanism developing current situation application 一,前言 行走机器人是机器人学中的一个重要分支。关于行走机器人的研究涉及许多方面,首先,要考虑移动方式,可以是轮式的、履带式的和腿式的等;其次,必须考虑 驱动器的控制,以使机器人达到期望的行为;第三,必须考虑导航或路径规划。因此,行走机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体 的综合系统。机器人的机械结构形式的选型和设计,应该根据实际需要进行。在机器 人机构方面,应当结合机器人在各个领域及各种场合的应用,开展丰富而富有创造性 的工作。对于行走机器人,研究能适应地上、地下、水中、空中、宇宙等作业环境的 各种移动机构。当前,对足式步行机器人、履带式和特种机器人研究较多,但大多数 仍处于实验阶段,而轮式移动机器人由于其控制简单,运动稳定和能源利用率高等特点,正在向实用化迅速发展,从阿波罗登月计划中的月球车到美国最近推出的NASA 行星漫游计划中的六轮采样车,从西方各国正在加紧研制的战场巡逻机器人、侦察车 到新近研制的管道清洗检测机器人,都有力地显示出行走机器人正在以其使用价值和 广阔的应用前景而成为智能机器人发展的方向之一。 二、课题国内外现状 多足步行机器人是一种具有冗余驱动、多支链、时变拓扑运动机构, 是模仿多足 动物运动形式的特种机器人, 是一种足式移动机构。所谓多足一般指四足及四足其以上, 常见的多足步行机器人包括四足步行机器人、六足步行机器人、八足步行机器人等。 步行机器人历经百年的发展, 取得了长足的进步, 归纳起来主要经历以下几个 阶段: 第一阶段, 以机械和液压控制实现运动的机器人。 第二阶段, 以电子计算机技术控制的机器人。 第三阶段, 多功能性和自主性的要求使得机器人技术进入新的发展阶段。 三、研究主要成果 国内多足步行机器人的研究成果[1]: 1991年,上海交通大学马培荪等研制出JTUWM[1]系列四足步行机器人。JTUWM-III是模仿马等四足哺乳动物的腿外形制成,每条腿有3个自由度,由直流伺服
机械原理课程设计——牛头刨床
机械原理课程设计——牛头刨床(1)待续 2008-11-21 02:13 目录 一、概述 §1.1、课程设计的题目---------------------------------------2 §1.2.、课程设计的任务和目的-----------------------------2 §1.3、课程设计的要求---------------------------------------3 §1.4、课程设计的数据---------------------------------------3 二、运动分析及程序 §2.1、拆分杆组------------------------------------------------4 §2.2、方案分析------------------------------------------------4 §2.3、程序编写过程------------------------------------------5 §2.4、程序说明------------------------------------------------6 §2.5、C语言编程及结果------------------------------------6 §2.6、位移,速度,加速度图------------------------------10 三、各运动方案的分析与评价 §3.1 方案一的运动分析和评价--------------------------12 §3.2 方案二的运动分析和评价--------------------------13 §3.3 方案三的运动分析和评价--------------------------15 §3.4 方案四的运动分析和评价--------------------------16 四、小结--------------------------------------- 19 五、参考文献---------------------------------20 一、概述 §1.1.课程设计的题目 此次课程设计的题目是:牛头刨床的主传动结构的设计. §1.2.课程设计的任务和目的 1)任务: 1 牛头刨床的机构选型、运动方案的确定; 2 导杆机构进行运动分析; 3 导杆机构进行动态静力分析; 根据要求发挥自己的创新能力,设计4到5种牛头刨床的主传动机构,使其可以满足牛头刨床的传动需要。 2)目的:机械原理课程设计是培养学生掌握机械系统运动方案设计能力的技术基础课程,它是机械原理课程学习过程中的一个重要实践环节。其目的是以机械原理课程的学习为基础,进一步巩固和加深所学的基本理论、基本概念和基本知识,培养学生分析和解决与本课程有关的具体机械所涉及的实际问题的能力,使学生熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,并进一步提高计算、分析,计算机辅助设计、绘图以及查阅和使用文献的综合能力。 §1.3.课程设计的要求 牛头刨床的主传动的从动机构是刨头,在设计主传动机构时,要满足所设计的机构要能使牛头刨床正常的运转,同时设计的主传动机构的行程要有急回运动的特性,以及很好的动力特性。尽量是设计的结构简单,实用,能很好的实现传动功能。 §1.4.课程设计的数据 方案导杆机构的运动分析导杆机构的动态静力分析
牛头刨床机械原理课程设计5、12点
课程设计说明书—牛头刨床 1. 机构简介 牛头刨床是一种用于平面切削加工的机床。电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。为此刨床采用有急回作用的导杆机构。刨刀每次削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。因此刨头在整个运动循环中,受力变化是很大的,这就
影响了主轴的匀速运转,故需安装飞轮来减少主轴的速度波动,以提高切削质量和减少电动机容量。 图1-1 1.导杆机构的运动分析 已知曲柄每分钟转数n2,各构件尺寸及重心位置,且刨头导路x-x位于导杆端点B所作圆弧高的平分线上。 要求作机构的运动简图,并作机构两个位置的速度、加速度多边形以及刨头的运动线图。以上内容与后面动态静力分析一起画在1号图纸上。 1.1设计数据
牛头刨床是一种用于平面切削加工的机床。电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。刨头右行时,刨刀进行切削,称工作切削。此时要求速度较低且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。为此刨床采用急回作用得导杆机构。刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮机构带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需装飞轮来减小株洲的速度波动,以减少切削质量和电动机容量。 设计 导杆机构的运动分析 内容 符号n2L O2O4L O2A L o4B L BC L o4s4xS6yS6 mm 单位r/mi n 方案 60 380 110 540 0.25l o4B0.5 l o4B240 50 Ⅲ 1.2曲柄位置的确定
(重庆理工大学计算机学院)编译原理课程设计报告
编译原理课程设计报告 实验名称编译原理课程设计 班级 学号 姓名 指导教师 实验成绩 2013 年06月
一、实验目的 通过设计、编写和调试,将正规式转换为不确定的有穷自动机,再将不确定的有穷自动机转换为与之等价的确定的有穷自动机,最后再将确定有穷自动机进行简化。 通过设计、编写和调试构造LR(0)项目集规范簇和LR分析表、对给定的符号串进行LR分析的程序,了解构造LR(0)分析表的步骤,对文法的要求,能够从文法G出发生成LR(0)分析表,并对给定的符号串进行分析。 二、实验内容 正规式——>NFA——>DFA——>MFA 1.正规式转化为不确定的有穷自动机 (1)目的与要求 通过设计、编写和调试将正规式转换为不确定的有穷自动机的程序,使学生了解Thompson算法,掌握转换过程中的相关概念和方法,NFA的表现形式可以是表格或图形。 (2)问题描述 任意给定一个正规式r(包括连接、或、闭包运算),根据Thompson算法设计一个程序,生成与该正规式等价的NFA N。 (3)算法描述 对于Σ上的每个正规式R,可以构造一个Σ上的NFA M,使得L(M)=L(R)。 步骤1:首先构造基本符号的有穷自动机。 步骤2:其次构造连接、或和闭包运算的有穷自动机。
(4)基本要求 算法实现的基本要求是: (1) 输入一个正规式r; (2) 输出与正规式r等价的NFA。(5)测试数据 输入正规式:(a|b)*(aa|bb)(a|b)* 得到与之等价的NFA N
(6)输出结果 2.不确定的有穷自动机的确定化 (1)目的与要求 通过设计、编写和调试将不确定的有穷自动机转换为与之等价的确定的有穷自动机的程序,使学生了解子集法,掌握转换过程中的相关概念和方法。DFA的表现形式可以是表格或图形。(2)问题描述 任意给定一个不确定的有穷自动机N,根据算法设计一个程序,将该NFA N变换为与之等价的DFA D。 (3)算法描述 用子集法将NFA转换成接受同样语言的DFA。 步骤一:对状态图进行改造 (1) 增加状态X,Y,使之成为新的唯一的初态和终态。从X引ε弧到原初态结点, 从原终态结 点引ε弧到Y结点。 (2) 对状态图进一步进行如下形式的改变
牛头刨床课程设计方案
海南大学机械原理课程设计说明书 设计题目:牛头刨床 小组成员: 专业班级:11级交通运输(一)班 指导老师:陈致水 2013年6月26日 目录 一、概述........................................................... (2) 二、机构简介与设计数据 (3) 三、课程设计的内容和步骤……………………………… ..4 四、参考文献 (11) 五、设计小结 (12) 一、概述 1.课程设计的题目 牛头刨床 2.课程设计的任务和目的 1)任务: a.导杆机构进行运动分析;
b.导杆机构进行动态静力分析; c.齿轮机构设计; 2)目的:机械原理课程设计是培养学生掌握机械系统运动方案设计能力的技术基础课程,它是机械原理课程学习过程中的一个重要实践环节。其目的是以机械原理课程的学习为基础,进一步巩固和加深所学的基本理论、基本概念和基本知识,培养学生分析和解决与本课程有关的具体机械所涉及的实际问题的能力,使学生熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,并进一步提高计算、分析,计算机辅助设计、绘图以及查阅和使用文献的综合能力。 .3.课程设计的要求 牛头刨床的主传动的从动机构是刨头,在设计主传动机构时,要满足所设计的机构要能使牛头刨床正常的运转,同时设计的主传动机构的行程要有急回运动的特性,以及很好的动力特性。尽量是设计的结构简单,实用,能很好的实现传动功能。 二.机构简介与设计数据 机构简介 牛头刨床是一种用于平面切削加工的机床。电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀 7作往复运动。刨头右行时,刨刀进行切削,称工作切削。此时要求速度较低且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。为此刨床采用急回作用得导杆机构。刨刀每
牛头刨床课程设计心得
牛头刨床课程设计心得 篇一:牛头刨床的设计与分析 一、概述 、课程设计的任务 机械原理课程是高等学校机械类近机类专业本、专科学生较全面地运用已学过的知识,特别是机械原理部分已学过的知识的知识第一次较全面地对一项工程实际的应用问题从任务分析、调查研究、方案比较、方案确定、绘制出机构运动简图、进行机械运动和动力学分析与设计的基本训练,是该课程的一个重要实践环节。其目的在于运用已学过的知识培养学生创新能力,用创新思想确定出解决工程实际问题的方案及其有关尺寸,并学会将方案绘制出机构运动简图的能力。培养学生对确定的机构运动简图进行机构运动分析及动力分析,学会按任务进行调研、实验、查阅技术
资料、设计计算、制图等基本技能。、课程设计的任务 (1)按设计任务书要求调研、比较设计的可能方案,比较方案的优劣,最终确 定所选最优设计方案; (2)确定杆件尺寸; (3)绘制机构运动简图; (4)对机械行运动分析,求出相关点或相关构件的参数,如点的位移、速度、 加速度;构件的角位移、角速度、角加速度。列表,并绘制相应的机构运(5)根据给定机器的工作要求,在此基础上设计飞轮; (6)根据方案对各机构进行运动设计,如对连杆机构按行程速比系数进行设 计;对凸轮机构按从动件运动规律设计凸轮轮廓曲线;对齿轮机构按传动比要求设计齿轮减速机构,确定齿轮传动类型,传动比并进行齿轮几何尺
寸计算,绘制齿轮啮合图。按间歇运动要求设计间歇运动机等等; (7)要求学生根据设计任务,绘制必要的图纸; (8)编制设计计算程序及相应曲线、图形;编写设计说明书。 、课程设计的方法 (9)机械原理课程设计的方法,大致可分为图解法和解析法两种,图解法的几 何概念气清晰、直观,但需逐个位置分别分析设计计算精度较低; 1速度分析: 1、曲柄位置“1”速度分析,(列矢量方程,画速度图,加速度图) 取曲柄位置“1”进行速度分析。因构件2和3在A处的转动副相连,故V A2=V A3,其大小等于W2lO2A,方向垂直于O2 A线,指向与ω2一致。 ω2=2πn2/60 rad/s=/s υA3=υA2=ω2·lO2A=×/s=/s(⊥O2A) 取构件3和4的重合点A进行速度
人因工程课程设计
重庆理工大学 《人因工程学》课程设计报告 题目:基于人因工程学的公交车扶手分析、改善、评价专业:工业工程班级111040802 小组成员: 指导老师:
时间:2014616 —62014620 课程设计任务书 班级111040802 姓名_________________ 一、课程设计的题目 基于人因工程学的公交车扶手分析、改善、评价 二、课程设计主要解决的问题 (1)公交车扶手高度的问题分析以及改善_______________ (2)公交车扶手紧缺的问题分析以及改善_______________ (3)公交车扶手抓握不舒适的问题分析以及改善_________ 三、课程设计相关附件(如:表格、图纸、软件等) (1)公交车扶手的问题分析以及改善__________________ (2)关于公交车扶手的问题的调查问卷________________ (3)应用软件:auto CAD2007、WPS、VISIO _____________ 四、课程设计主要参考资料 (1)______________________ (2)刘焱,基于人机工程学的城市公交车设计方法研究
(3)______________ 五、任务发出日期:2014616完成日期:2014620 指导教师签字:___________________ 指导教师对课程设计的评语 指导教师签字:
目录 1.引言 (3) 2. 研究背景 (3) 3. 公交车扶手的问题 (4) 3.1问题一:扶手高高在上,乘客无可奈何 (4) 3.2问题二:无地儿可扶,扶手紧缺 (5) 3.3问题三:扶手设计不合理,抓握不舒适 (6) 4.分析与改善 (7) 4.1针对扶手高度问题 (9) 4.1.1扶手高度数据分析 (9) 4.1.2改善方案 (11) 4.2针对无地儿可扶,扶手紧缺问题 (12) 4.3针对扶手设计不合理,抓握不舒适问题 (13) 5. 改进方案的综合评价分析 (16) 6. ........................................................................ 设计体会16 参考文献 (17) 公交车扶手改善的设计
牛头刨床机械原理课程设计方案一位置和位置
牛头刨床机械原理课程设 计方案一位置和位置 Last updated on the afternoon of January 3, 2021
课程设计说明书 学院:_________xxxxxxxxxxxxxxx__ 班级:xxxxxxxxxxxxx 学生姓名: xxx 学号:xxxxxxxxxxx 设计地点(单位)___________xxxxxxxxxxxxxxxxxx ____________ 设计题目:_____________牛头刨床__________________________ 完成日期: 2015年 7 月 10日 成绩(五级记分制):______ __________ 教师签名:_________________________ 年月日 设计数据 (2) 1、概述 牛头刨床简介 (3) 运动方案分析与选择 (4) 2、导杆机构的运动分析 位置4的速度分析 (6) 位置4的加速度分析 (7) 位置9的速度分析 (11) 位置9的加速度分析 (12) 3、导杆机构的动态静力分析 位置4的惯性力计算 (15) 杆组5,6的动态静力分析 (15) 杆组的动态静力分析 (16)
平衡力矩的计算 (17) 4、飞轮机构设计 驱动力矩 (19) 等效转动惯量 (19) 飞轮转动惯量 (20) 5、凸轮机构设计 (22) 6、齿轮机构设计 (26) 1.概述 一、机构机械原理课程设计的目的: 机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要实践环节。其基本目的在于: (1)进一步加深学生所学的理论知识,培养学生独立解决有关本课程实际问题的能力。 (2)使学生对于机械运动学和动力学的分析设计有一较完整的概念。 (3)使学生得到拟定运动方案的训练,并具有初步设计选型与组合以及确定传动方案的能力。 (4)通过课程设计,进一步提高学生运算、绘图、表达、运用计算机和查阅技术资料的能力。 二、机械原理课程设计的任务:
牛头刨床机构设计方案
牛头刨床机构设计方案 一、机械原理课程设计的目的与任务 1、课程设计的目的 机械原理课程设计是继机械原理课程之后独立的设计课程。其目的是进一步加深学生对所学知识的理解。使学生对于机构分析与综合的基本理论、基本方法有一个系统的完整的概念,培养学生综合运用所学知识独立解决机构设计问题的能力和使用计算机解决工程技术问题的能力。同时培养学生的创新精神。 2、课程设计题目 牛头刨床机构设计或其他自选题目 3、课程设计的任务 课程设计的任务是根据要求拟定和论证机器的主体机构的设计方案,并对选定方案进行运动分析,确定飞轮转动惯量,对齿轮机构进行设计计算,最后完成设计图纸,设计说明书(A4纸)(如果在计算过程中借助计算机计算,则需要打印源程序和计算结果、图表结果)。设计说明书统一按《北京林业大学本科毕业论文》(教务处网站下载专区里有下载)的格式要求撰写。 课程设计包括,主体机构设计,齿轮机构设计两个部分。主体机构由学生自定设计方案,齿轮机构采用统一设计方案。 4、课程设计的准备和注意事项 在课程设计前要阅读指导书,复习有关课程内容,拟定主体机构的设计方案前要查阅有关资料,观看录像片,了解各种机构及其使用场合。
图1 切削力图2 牛头刨床机构 二、主体机构设计 主体机构是指实现刨刀往复运动(主运动)的传动机构,设计方案由学生在作方案比较和论证的基础上自选。 1、主体运动的运动要求和动力要求 (1)刨刀工作行程要求速度比较平稳,空回行程时刨刀快速退回,机构行程速比系数在1.2左右。 (2)刨刀行程H=300mm或H=150mm。曲柄转速、切削力、许用传动角等见表1。(3)切削力P大小及变化规律如图1所示,在切削行程的两端留出一点空程。 2、设计要求 在满足运动要求和动力要求的条件下,每组拟出1个设计方案(可自己设计,也可从3的建议中选取),对选定的方案用图解法作一个一般位置的运动分析,包括机构运动简图,速度,加速度图(要保留作图痕迹)。
重庆理工大学会计学专业培养计划
(会计学)专业培养方案 专业代码:110203学科二级类:工商管理类授予学位:管理学学士 一、有关说明 (一)业务培养目标 本专业培养具有较为深厚的管理学、经济学等相关学科的理论基础,具备良好的职业意识和扎实的会计学专业基础知识和专业能力,能在企业、事业及政府部门从事会计工作的高素质应用型高级专门人才。 (二)基本规格和要求 本专业学生主要学习会计、审计、管理学、法律、计算机等方面的基本理论和基本知识,受到会计方法和技能方面的基本训练,着重培养学生的会计实际工作能力和分析解决会计问题的基本能力。 毕业生应获得以下几方面的知识和能力:其一,掌握管理学、经济学和会计学的基本理论、基本知识;其二,掌握会计学的定性、定量分析方法和计算机的基本知识,具有较强的信息技术能力;其三,具有较强的语言与文字表达、人际沟通、信息获取能力及分析和解决会计问题的基本能力;其四,熟悉国内外与会计相关的方针、政策、法规及国际会计惯例;其五,了解本学科的理论前沿和发展动态;其六,掌握文献检索、资料查询的基本方法,具有一定的科学研究能力和实际工作能力。 (三)主干学科 管理学、经济学。 (四)主要课程 管理学、微观经济学、宏观经济学、统计学、会计学基础、管理信息系统、中级财务会计、高级财务会计、财务管理、管理会计、成本会计、审计学、会计信息化、市场营销学、经济法等。 (五)主要实践环节 军训、课程实习、专业实习、毕业实习、毕业论文等,共计27周。 (六)专业特色 本专业注重对学生专业理论知识、技能和综合应用能力的培养,强调专业知识的系统性与实际工作能力的训练,要求学生通晓国内外会计准则、经济法规和税收法规制度,熟练运用各种会计软件,具备分析和解决企业、公司财务会计实际问题的初步能力,具有良好的职业适应能力和专业拓展能力。
牛头刨床课程设计
牛头刨床课程设计文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256)
目录 工作原理 牛头刨床是一种用于平面切削加工的机床,如图a)所示。电动机经过皮带和齿轮传动, 带动曲柄2和固结在其上的凸轮8。刨床工作时,由导杆机构2-3-4-5-6带动刨头6和
刨刀7作往复运动。刨头左行时,刨刀不切削,称为空回行程,此时要求速度较高,以提高 生产率。为此刨床采用有急回运动的导杆机构。刨刀每切削完一次,利用空回行程的时间, 凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构(图中未画),使工作台连同工件 作一次进给运动,以便刨刀继续切削。刨头在工作过程中,受到很大的切削阻力(在切削的 前后各有一段的空刀距离,见图b),而空回行程中则没有切削阻力。因此刨头在 整个运动循环中,受力变化是很大的,这就影响了主轴的匀速转动,故需安装飞轮来减小主 轴的速度波动,以提高切削质量和减少电动机容量。 (a) (b) 图d
一.设计任务 1、运动方案设计。 2、确定执行机构的运动尺寸。 3、进行导杆机构的运动分析。 4、对导杆机构进行动态静力分析。 5、汇总数据画出刨头的位移、速度、加速度线图以及平衡力矩的变化曲线。 二.设计数据 本组选择第六组数据 表1 表2
三.设计要求 1、运动方案设计 根据牛头刨床的工作原理,拟定1~2个其他形式的执行机构(连杆机构),给出机构简图并简单介绍其传动特点。 2、确定执行机构的运动尺寸 根据表一对应组的数据,用图解法设计连杆机构的尺寸,并将设计结果和步骤写在设计说明书中。 注意:为使整个过程最大压力角最小,刨头导路位于导杆端点B所作圆弧高的平分线上(见图d)。 3、进行导杆机构的运动分析 根据表一对应组的数据,每人做曲柄对应的1到2个位置(如图2中1,2,3,……,12各对应位置)的速度和加速度分析,要求用图解法画出速度多边形,列出矢量方程,求出刨头6的速度、加速度,将过程详细地写在说明书中。 4、对导杆机构进行动态静力分析 根据表二对应组的数据,每人确定机构对应位置的各运动副反力及应加于曲柄上的平衡力矩。作图部分与尺寸设计及运动分析画在同一张纸上(2号或3号图纸)。
重庆理工大学个人简历模板word格式
大学生求职简历 个人简历模板下载 Word格式可编辑 应届生求职简要修改即可使用 多篇4页简历含封面和自荐信自我评价另附详细简历编辑说明 精选
王某历 希望有个平台让我展现自己的才华!H H Hope to have a platform let me show my talent! 求职意向:XWORDX 毕业院校:北京某某大学 所学专业:简历设计 联系电话:0123456789 电子邮箱:xxxxxx@xxxxxcomx
王某历 应聘岗位:XXXXX 现居住地:广州市海淀区 出生日期:1990.09.12 电话:0123456789 邮箱:xxxxx@xxxxcomx 2011.09~2015.06 广州应聘人大学 营销学 本科 ● 主修课程:管理学、经济学、管理信息系统、信息经济学、信息检索、计算机开发技术、数库原理与应用、应用统计学、组织行为学等 2012.10~2015.06 校学生会宣传部 部长 ● 负责校学生会相关活动的宣传工作,带领部门成员制作宣传海报、传单、横幅等宣传材料; ● 多次举办学校社区的“社区文化节”、“消防知识竞答赛”和“预防安全隐患征文大赛”等大型活动。 2011.09~2013.06 院学生会编辑部 部长 ● 积极参与学生会的各项活动,领导其他干事一起参与各类学生活动的策划; ● 负责学院活动的赞助拉取,制作活动赞助方案,并上门拜访企业拉取赞助,建立良好的合作关系;负责院刊的策划编辑工作,统筹小部分任务; ● 及时完成学生会的其他工作,工作得到学校老师认可。 实践经历 毕业院校 ● 获2013-2014学年度“省双优”称号 ● 获2013-2014学年度“优秀干部”称号 ● 获2013-2014学年度“三好学生”称号 ● 获2012-2013学年度“国家励志奖学金” ● 大学英语四级证书 ● 会计资格证书 ● 国家计算机等级二级证书(C 语言) ● 熟练使用office 办公软件 荣誉奖励 技能证书 自我评价 ● 个人介绍:营销学专业毕业,专业知识扎实;熟练掌握销售话术和销售技巧。 ● 工作方面:有丰富的营销实习和见习经历,熟悉销售工作的流程,有丰富的实际操作经验。 ● 性格方面:具备良好的沟通表达能力,人际关系良好,能很好与顾客沟通。 ● 学习方面:学习能力较强,能吃苦耐劳,有良好的团队协助能力及逻辑思维能力。
机械原理牛头刨床设计
牛头刨床设计 一、设计题目 (a) (b) 图 3-18 牛头刨床是一种用于平面切削加工的机床,如图3-18a 。电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。刨床工作时,刨头6和刨刀7作往复运动。刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量。刨头左行时,刨刀切削,称空回行程。此时要求速度较高,以提高生产率。刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。刨头在工作行程中,受到很大的切削阻力(在切削的前后各有一段约H 05.0的空刀距离,见图3-18b ),而空回行程中则没有切削阻力。因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转.故需安装飞轮来减小主轴的速度波动,以提高切削质量和减少电动机容量。 二、设计数据,见表3-1和表3-2 表3-1 方案 导杆机构的运动分析 导杆机构的动态静力分析 n 2 l O2O4 l O2A l O4B l BC l O4S4 x S6 y S6 G 4 G 6 P y p J S4 r/min mm N mm kg.m 2 1 60 380 110 540 0.25 l O4B 0.5l O4B 240 50 200 700 7000 80 1.1 2 64 350 90 580 0. 3 l O4B 0.5l O4B 200 50 220 800 9000 80 1.2 3 72 430 110 810 0.36 l O4B 0.5l O4B 180 40 220 620 8000 100 1.2 表3-2 方案 飞轮转动惯量的确定 凸轮机构设计 齿轮机构的设计 δ n O’ z 1 z O ’ z 1’ J O2 J O1 J O" J O ’ ψmax l O9D [α] Ф Фs Ф’ d O ’ d O" m 12 m O"1’ α r/min Kg.m 2 o mm o mm o 1 0.15 1440 10 20 40 0.5 0.3 0. 2 0.2 15 125 40 75 10 75 100 300 6 3.5 20 2 0.15 1440 1 3 16 40 0.5 0. 4 0.2 5 0.2 15 135 38 70 10 70 100 300 6 4 20