时C =c ,A =a (n x ≥0,n z ≥0)C =-c ,A =a (n x ≤0,n z ≥0)C =c -180°,A =a (n x ≤0,n z ≤0)C =180°-c ,A =a (n x ≥0,n z ≤0)
671机械科学与技术第22卷
当45°< a 时
此时不能用卧轴加工,提示错误。
可得坐标值为
(X,Y,Z,1)=(-x,y,z,1)T1T2T3 2 程序的设计与实现
根据解释执行的原则,后置处理程序采用面向对象的方法开发,表1描述了主要对象类所实现的操作。
表1 主要对象类及其功能
类 名功 能
CCm dGo to直线插补计算
CCm dC ircle圆弧插补计算
CCm dFedrat给进速度计算
CCm dEndO fPath子程序段结束标识符
具体流程为:读出刀位文件中一条完整的记录(行),根据命令字分析该记录的类型,并产生对应的类对象,然后将产生的类对象依次存入CO bL ist对象中,直到刀位文件结束,在解释执行的过程中,再将类对象从CO bL ist对象中依次取出,并根据类对象类型确定是进行坐标变换还是进行文件代码的替换,输入机床旋转中心坐标和工件原点坐标,运用上述算法,根据加工指令、加工参数将刀位文件进行转换,生成一个完整的数控程序段,并写到数控程序文件中去。
程序的转换结果经加工试验证明完全正确。
3 结束语
现代工业中,复杂零件和自由曲面的加工,都广泛的在使用五轴联动数控机床,由于五轴加工的复杂性,而且对于不同的类型的数控机床,其后置处理的算法又有些差异,因此研究新的机床运动形式和相应的后置处理方法是数控编程的重要内容。笔者通过对DM U60P机床的后置处理分析,基本上解决了五轴联动数控机床后置处理的一般问题,具有一定的参考价值。
[参考文献]
[1] 马誉贤.通用后置处理软件的开发[J].CAM与数控加工,
2001,(6):33~34
[2] 任军学,刘维伟,汪文虎等.五坐标数控机床后置处理算法
[J].航空计算技术,2000,30(1):40~43
[3] 刘日良,张承瑞等.5轴数控机床坐标系统的一个特例及其
后置处理方法[J].机械设计与制造工程,2002,(31)3:61~62
[4] 刘雄伟等.数控加工理论与编程技术[M].北京:机械工业
出版社
,1994(上接第174页)
根据表1不难看出,在相同的位移加载条件下,随着加载频率的增加,阻尼滞后角和阻尼损耗因子随之升高,通过比较发现,理论曲线与实测曲线拟合的非常好(见图4)。
图4 10H Z时的迟滞回线理论值与实测值
4 结论分析
(1)当变形幅值保性持不变时,载荷频率对金属橡胶材料的弹性、阻尼特性有一定影响。原因在于提高载荷频率,将引起金属丝接触面之间的磨损速率增大,使线匝之间的接触特性随频率发生变化[1,5],这点与橡胶等普通粘弹性材料相似。
(2)由于金属橡胶是金属丝组成的弹性多孔状材料,其力学性能与温度具有小相关性,即温度对其阻尼的稳定性没有太大影响[1]。而普通橡胶是一种高分子材料,温度对其阻尼性能有很大影响,只有在一定温度区它才能有稳定的阻尼性能[4]。这方面,金属橡胶明显优于普通橡胶材料。
(3)由于此种减振器构型的特殊性,使得它在变形过程中,各个部分参与变形的程度要明显大于一般的实心圆柱构件,能有效地提高材料的阻尼耗能,易制成减振效果优异的大阻尼减振器[3]。
[参考文献]
[1] 契戈达耶夫(俄)等.李中郢等译.金属橡胶构件的设计
[M].北京:国防工业出版社,2000
[2] 邓剑波.新型结构阻尼材料金属橡胶性能的理论与应用实验
研究[D].北京:北京航空航天大学,1998
[3] 黄协清,张铁山,张俊华.金属橡胶材料隔振特性研究[J].
机械科学与技术,2000,19(6):977~980
[4] 戴德沛.阻尼技术的工程应用[M].北京:清华大学出版社,
1991
[5] 白鸿柏.滞迟振动系统及其工程应用[M].北京:科学出版
社,2002
771
增 刊胡寅亮等:五轴联动数控机床的后置处理方法
简介五轴联动数控机床
五轴联动数控机床是一种科技含量高、精密度高专门用于加工复杂曲面的机床,这种机床系统对一个国家的航空、航天、军事、科研、精密器械、高精医疗设备等等行业有着举足轻重的影响力。 简介 装备制造业是一国工业之基石,它为新技术、新产品的开发和现代工业生产提供重要的手段,是不可或缺的战略性产业。即使是发达工业化国家,也无不高度重视。近年来,随着我国国民经济迅速发展和国防建设的 需要,对高档的数控机床提出了迫切的大量需求。机床是一个国家制造业水平的象征。而代表机床制造业最高境界的是五轴联动数控机床系统,从某种意义上说,它反映了一个国家的工业发展水平状况。长期以来,以美国为首的西方工业发达国家,一直把五轴联动数控机床系统作为重要的战略物资,实行出口许可证制度。特别是冷战时期,对中国、前苏联等社会主义阵营实行封锁禁运。爱好军事的朋友可能知道著名的“东芝事件”:上世纪末,日本东芝公司卖给前苏联几台五轴联动的数控铣床,结果让前苏联用于制造潜艇的推进螺旋桨,上了几个档次,使美国间谍船的声纳监听不到潜艇的声音了,所以美国以东芝公司违反了战略物资禁运政策,要惩处东芝公司。 五轴机床的种类 有摇篮式、立式、卧式、NC工作台+NC分度头、NC工作台+90°B轴、NC工作台+45°B 轴、NC工作台+ A轴°、二轴NC 主轴等。 A轴和C轴最小分度值一般为0.001度,这样又可以把工件细分成任意角度,加工出倾斜面、倾斜孔等。A轴和C轴如与XYZ三直线轴实现联动,就可加工出复杂的空间曲面,当然这需要高档的数控系统、伺服系统以及软件的支持。这种设置方式的优点是主轴的结构比较简单,主轴刚性非常好,制造成本比较低。但一般工作台不能设计太大,承重也较小,特别是当A轴回转大于等于90度时,工件切削时会对工作台带来很大的承载力矩。另一种是依靠立式主轴头的回转。主轴前端是一个回转头,能自行环绕Z轴360度,成为C轴,回转头上还有带可环绕X轴旋转的A轴,一般可达±90度以上,实现上述同样的功能。这种设置方式的优点是主轴加工非常灵活,工作台也可以设计的非常大,客机庞大的机身、巨大的发动机壳都可以在这类加工中心上加工。这种设计还有一大优点:我们在使用球面铣刀加工曲面时,当刀具中心线垂直于加工面时,由于球面铣刀的顶点线速度为零,顶点切出的工件表面质量会很差,采用主轴回转的设计,令主轴相对工件转过一个角度,使球面铣刀避开顶点切削,保证有一定的线速度,可提高表面加工质量。这种结构非常受模具高精度曲面加工的欢迎,这是工作台回转式加工中心难以做到的。为了达到回转的高精度,高档的回转轴还配置了圆光栅尺反馈,分度精度都在几秒以内,当然这类主轴的回转结构比较复杂,制造成本也较高。 国外五轴联动数控机床是为适应多面体和曲面零件加工而出现的。随着机床复合化技术的新发展,在数控车床的基础上,又很快生产出了能进行铣削加工的车铣中心。五轴联动数控机床的加工效率相当于两台三轴机床,有时甚至可以完全省去某些大型自动化生产线的投资,大大节约了占地空间和工作在不同制造单元之间的周转运输时间及费用。市场的需求推动了我国五轴联动数控机床的发展,CIMT99 展览会上国产五轴联动数控机床第一次登上机床市场的舞台。自江苏多棱数控机床股份有限公司展出第一台五轴联动龙门加工中心以来,北京机电研究院、北京第一机床厂、桂林机床股份有限公司、济南二机床集团有限公司等企业也相继开发出五轴联动数控机床。 当前,国产五轴联动数控机床在品种上已经拥有立式、卧式、龙门式和落地式的加工中心,适应不同大小尺寸的杂零件加工,加上五轴联动铣床和大型镗铣床以及车铣中心等的开发,基本涵盖了国内市场的需求。精度上,北京机床研究所的高精度加工中心、宁江机械集
五轴联动数控机床技术现状与发展趋势
五轴联动数控机床技术现状与发展趋势 摘要:介绍五轴联动数控机床在工业加工中的优势和重要性,从国、国外两个方面阐述目前五轴联动数控机床发展的现状,最后从目前机床工业发展动态出发展望五轴联动数控机床的发展趋势。 关键词:五轴联动数控机床技术现状发展趋势 一、简介 五轴联动数控机床是一种科技含量高、精密度高专门用于加工复杂曲面的机床,这种机床系统对一个国家的航空、航天、军事、科研、精密器械、高精医疗设备等等行业有着举足轻重的影响力。目前,五轴联动数控机床系统是解决叶轮、叶片、船用螺旋桨、重型发电机转子、汽轮机转子、大型柴油机曲轴等等加工的唯一手段。 二、国外研究现状 则仕,秋菊2005年提出一种五轴联动机器人运动学建模与仿真研究,探讨在VC++6.0集成编程环境下,调用OpenGL实现机器人的建模与仿真。对一种五轴联动机器人首先建立几何模型,对其正逆运动学问题进行分析求解,然后建立友好人机交互界面,对机器人示教再现过程进行模拟,最终实现让机器人走空间直线路径的轨迹规划仿真。该方法为五轴联动机器人研究开辟新的道路,为五轴联动机器人的实用化做好理论实践经验。 世田,殿柱,肖霞2006年提出基于UG/POST五轴联动加工中心专用后置处理器的研发,通过结舍UG/Post Builder后置处理器开发工具和上述后置处理算法,开发了该机床的专用后置处理器,并通过试验进一步验证了该后置处理器的正确性和实用性。 德国兹默曼公司2007年开发出FZ25龙门铣床,标志着Zimmermann(兹默曼)公司再次扩展了其高度专业化的五轴联动HSC龙门铣床的应用围。FZ 25非常适合大工件的干式切削,尤其是轻型的复合材料的加工,例如碳纤维和玻璃纤维强化塑料、环氧树脂、亚安酯、聚苯乙稀等。 杜玉湘,陆启建,明灯2007年提出五轴联动数控机床的结构和应用,介绍了五轴联动数控机床的几种结构及其特点和发展趋势;阐述了几种五轴联动机床加工的加工造型、编程(CAD/CAM系统)及其优缺点;详细描述了五轴联动数控机床对数控系统的要求及四开公司五轴联动数控系统的关键参数;列举了四开公司历年来参展的五轴联动数控机床及现场加工工件的情况。 燕红波,庆东,芳在2007年提出五轴联动的数控加工技术的研究及应用,五轴联动加工以其高柔性,高复合性,优良的切削位置姿态赢得越来越多用户的青睐,但编程的抽象和操作的复杂已经成为提高数控加工技术的一大瓶颈问题.本文介绍了多轴联动数控加工中心的结构模型,提出了基于典型的CAD/CAM软件UG的多轴后处理方法和加工实例,并对某一新型的五轴联动机床阐述了其各轴的坐标变换关系,开发了后处理系统,为多轴联动加工方案的制定提供了参考。 培楠,郭锐锋,黄艳等在2008年提出四元数五轴联动插补算法的研究,设计一种基于四元数五轴联动的插补算法,不仅简化了插补计算量,同时能够使刀具从一点平稳的运动到另一点,而且插补的轨迹更光滑连续.文章引入四元数理论,重点研究了四元数在构造数学模型和运动变换中的应用,并在Matlab中成功的进行了仿真.实验结果表明了该算法的可行性。四元数是最简单的超复数,那可不可以引入其他元数理论,产生的效果将会是怎么样呢? 士玉,徐树洛在2008年提出五轴联动龙门加工中心现状与发展探讨,通过对五轴联动龙门加工中心现状的分析,总结了机床总体结构特点,找出了国外机床在技术上的差距。提出了高端机床发展的相关理念。高端机床也意味着高技术,高投入和高产出。向高端技术发展,
五轴联动数控加工中的刀具补偿方法
五轴联动数控加工中的刀具补偿方法 刀具补偿是现代计算机数控(CNC)系统所具有的重要功能之一,可分为刀具半径补偿和长度补偿两种。就目前而言,应用于二维轮廓加工的两坐标联动数控系统基本都具备刀具补偿功能,而多坐标(三坐标以上)联动数控系统中对于刀具补偿功能还未能得到较好解决。特别是五轴联动加工中,由于刀具的旋转运动,使得五轴联动刀具补偿较难实现。 国外几个主要CNC生产商在其高档的五轴联动数控系统中已经带有刀具补偿功能,如SIEMENS的SINUMERIC840D系统具有将三维空间向量转换为实际机械轴角度的计算能力的“3D Tool Radius Compensation”功能,而所带的坐标转换(或位置变换)功能其实质就是五轴刀具长度补偿。国内有关五轴联动加工刀具补偿方法的研究并不多,因此,本文将对五轴加工中的刀具补偿问题进行深入研究,分别对五轴加工中的刀具半径补偿和长度补偿的实现方法进行详细叙述,以期能建立并完善五轴联动CNC系统的刀具半径和长度补偿功能。 一、五坐标加工数控程序的生成 五坐标加工主要应用于复杂曲面零件如整体叶轮等的加工,因此其数控程序的生成必须借助于一些自动编程软件如UGII、HyperMill等。在应用这些软件进行五坐标数控编程时得到的刀位文件(CLF)是不依赖于具体机床结构和形式的,而且它提供了五轴曲面加工时刀具底端面中心(以下简称为刀具中心)在工件坐标系下要求位移到的位置坐标以及刀轴的方位矢量等信息,但CLF文件的生成却依据了选用刀具的形式(如平底刀等)和刀具半径等参数。 因此,五轴加工程序的生成与刀具参数设定有密切的关系。另外,利用编程软件的后置处理模块根据选用五轴数控机床的结构形式等参数将CLF文件转换成加工曲面所需的数控程序。假定某加工程序段为:G01XxYyZzAaCc其中位置坐标值x、y、z可以是刀具中心坐标也可以是机床主轴端(Spindle none)的坐标a、c分别为绕X轴、Z轴的角度坐标值。当x、y、z为刀具中心坐标时称为刀具中心编程,当x、y、z为主轴端坐标时称为主轴端编程,如图1所示。 但无论哪种编程方式都需数控系统具有刀具自动补偿功能才能加工出我们所需要的零件。以下将以图2所示结构形式五轴数控机床和刀具(平底刀)中心编程为例分别叙述五轴联动加工中的刀具半径补偿和长度补偿。 二、现行五轴数控编程在刀具半径补偿方面的不足 上节中叙述的五坐标数控加工编程方式和得到的数控指令格式是根据国际标准化组织(ISO)有关数控编程的标准ISO 6983进行的。对平面两轴或两轴半的加工而言,在ISO 6983中常使用G41/G42功能来补偿刀具半径。补偿时根据数控程序中提供的相关信息如G17/G18/G19进行加工平面选择配合G41/G42左右刀具补偿选取,利用一般较低档的控制器即可完成。 但是,对于三轴特别是五轴加工,即刀具半径的补偿要在三维空间完成,ISO 6983中所提供的信息则显得不足,如G17/G18/G19、G41/G42等已经失效,插补程序段中提供的数据信息又仅仅是刀具中心点坐标和刀具轴的方位角,刀具半径补偿实际上不可能进行,因为控制
数控机床机械原点的调整与修复
数控机床机械原点的调整与修复 1、引言 在数控机床制造和生产的过程中,为了能够更加有效的保证机床的正常运行,首先应该对机床建立一个原点始终在一个位置的坐标系,在设计的过程中通常都是将坐标原点之前设置一个行程开关,因其所在的位置也经常被人们称作原点开关,将开关所要执行的程序输入到PLC当中就可以十分有效的保证轴机床参数设计的合理性和科学性。 2、可能发生的问题及调整与修复的方法 当机床机械原点经过调试确定以后,为方便用户观察,一般由制造商在该轴相对运动部件上牢靠打上对应的两个醒目的红箭头,以便用户确认每次开机后“回零”操作的正确性。同时我们知道,在数控机床的制造过程中,为最大限度地保证数控轴的精度,般有一个使用精密仪器检测后对其丝杠螺距误差及丝杠反向间隙误差的补偿工作。这项工作的基础是建立在上面所述的坐标系的原点上的,并规定这一点误差为零。 (1)为了便于对问题进行具体的分析,这一次我们将机械原点的方向设置为正方向,如果固定在机床上的部件或者是感应块相对较短,感应块就非常容易超出自己工作的范围,在这样的情况下执行回零操作就会使得轴在起初的阶段向距离零点越来越远的方向上运动,当遇到了限位的时候就会出现回零失败的现象,出现这种问题的主要原因是设计上的缺陷,针对这样的问题可以有两种解决方式:首先是在每次进行回零操作之前,应该用专业的工具将移动键的位置进行适当的调整,最好是移动到该轴承的负行程范围内,在这之后再进行回零操作就不会出现回零失败的问题。其次是在进行设计的过程中就应该将感应块的长度设计得更加合理一些,这样就能够保证运行的整个过程中不会受到其他方面的一些负面的影响。 (2)在工作的过程中偶尔会撞动原点开关,或者是因为一些原因对原点开关进行了更换,这个时候机械的机床原点也会出现一定的变化。解决这一问题的过程中一定要进行详细的分析,伺服电动机和直连滚珠丝杠杆的相对位置没有发生变化,数控轴会员店后的零点位置就是按照螺旋距离而不断变化的,在这样的情况下原点开关的安装位置也就形成了一个相对合理的区间,这个距离的范围就是一整个罗选距的范围。在重新调整的过程中,应该将开关放置在一个相对比较好的位置上,然后再对回零后的原点红箭头的位置进行仔细的观察,如果红箭头是完全对奇和重合的,那也就说明已经恢复到了原点的位置,如果二者是一个稍稍靠前,一个稍稍靠后的关系就说明原点没有恢复到其原来的位置,应该及时对其进行调整。
FANUC数控机床机械原点的设置及回零常见故障分析
FANUC数控机床机械原点的设置及回零常见故障分析 当前大多数数控机床均采用通过减速档块的方式回零,但谊方式在日常使用中故障率却艰高,有时甚至出现机械原点的丢失。本文以FANUC系统的台中精机VCENTER-70加工中心为例浅析了数控机床机械原点的设置方法,并对该类数控机床常见回零故障的各种形式式进行了分析与总结。 机械原点是机床生产厂家在生产机床时任机床上设置的一个物理位置,可以使控制系统和机床能够同步,从而建立起一个用于测量机床运动坐标的起始位置点,通常也是程序坐标的参考点。大多数数控机床在开机后都需要回零即回机械原点的操作。本文以FANUC系统的台中精机VCENTER-70加工中心为例浅析了数控机床机械原点的设置方法,并对此类数控机床常见回零故障的各种形武进行了分析与总结。 1 机械原点设置 1.1 机械原点丢失的原因 台中精机生产的VCENTER-70加工中心采用增量编码器作为机床位置的检测装置。系统断电后,工件坐标系的坐标值就会失去记忆,尽管靠电池能够维持坐标值的记忆,但只是记忆机床断电前的坐标值而不是机床的实际位置,所以机床首次开机后要进行返回参考点操作。而当系统断电遇到电池没电或特殊情况失电时,就会造成机械原点的丢失.从而使机床回参考点失败而无法正常工作。此时机床会产生。#306 n轴电池电压0#的报警信息,并且还会产生机械坐标丢失报警。#300第n轴原点复位要求”(n代指X、Y、Z)。 1.2 机械原点的设置 在通常情况下,设置数控机床机械原点的方法主要有以下两种:1)手动使X、Y、Z三轴超程印利用三轴的极限位置选择机械原点。2)利用各坐标轴的伺服检溯反馈系统提供相应基准脉冲来选择机床参考点即机械原点。由于第一种方法是机床厂家通常建议的也是较为简便和实用的方法.因此本文在此详细介绍第1种做法。以X轴为例,设置步骤如下: (1)将机床操作面板上的方式选择开关设定为MDI方式。 (2)按下机床MDI面板上的功能键[OFS/SET]数次,进入设定画面。 (3)将写参数中的0改为1,由此,系统进入了参数可写状态。此时机床出现。SWO 100参数写入开关处于打开”的报警信息。忽略这条报警信息,设置完参数后改回为0即可。 (4)按下功能键lsYSTEM】,进入系统参数键面。通过参数搜索找到参数1815(如表l 所示)通常情况下,X轴的#4APZ或#5 APC会显示为0,若不为0就将其设定为0。 (5)找到参数1320,此参数为存储各轴正向行程的坐标值。将其X轴的正向行程设定为最大值999999。目的是让X轴的正向软限位位置值大于其正向硬限位的位置值。 (6)将方式选择开关打到手轮方式,然后摇动手轮使工作台碰及X轴的正向限位档块,此时机床会出现“#500+X过行程”报警。
两种数控车床坐标系原点设置方式的比较
两种数控车床坐标系原点设置方式的比较 刘 浏 (常州技术师范学院机械系,江苏常州213001) 摘要:数控车床坐标轴及其方向的设定均按标准,但坐标系原点的设置却不一定雷同。本文比较了全功能型数控车床与CK6432普及型数控车床坐标系原点设置的不同情况,并分析了由此带来的问题。 关键词:数控车床;机床坐标系;坐标原点 中图分类号:TG5 文献标识码:B 文章编号:1001-3881(2002)5-194-1 数控机床因生产柔性大、加工能力强、加工精度高、可与计算机共享信息等特点,已成为现代机械制造业的主力设备。数控车床是装备量最大的数控机床,约占总数的42%。在我国,根据数控车床的性能,可将其分为以下几类: (1)教学型:采用最简单的单片机控制系统,步进电机,开环控制,主轴电机功率很小,只能进行数控加工的演示,谈不上加工能力。 (2)经济型:采用单片机数控系统,步进电机,开环控制,一般是在普通车床的基础上改装而成。在发达国家早已淘汰。但在我国,受经济、技术条件的制约,再加上其加工能力及精度较普通车床要高,在我国仍有一定市场。据统计,2000年,全国该类机床的总销售量达1万台。 (3)全功能型:也称车削中心。一般采用FANUC 、SI EMENS 等名牌数控系统,交流伺服电机,半闭环控制,主轴变频电机,斜导轨,多工位转塔刀架,配对刀仪,脉冲当量为0 001m m,价格在50~70万之间。若具备动力刀架、C 轴控制功能,就成为车铣中心。 (4)普及型:在全功能型的基础上简化而得,售价不到20万。 (5)高精度型:脉冲当量达到0 0001mm,只装备个别部门,用于超高零件的加工。 作者所在单位是国家、江苏省职教师资重点培训基地。为搞好数控技术培训,学院购买了四台南京第二机床厂生产的CK6432车床,这是一种普及型数控车床。采用FANUC 0TD 系统,交流伺服电机,半闭环控制,45 斜导轨。另外,与台湾友嘉集团签定了购买一台全功能型数控车床的意向协议。 C K6432与车削中心(如日本WASI NO 公司的LJ10 MC 车铣中心)两者的机床坐标系相比较,坐标轴及其方向的设置是一致的,但坐标系原点并不相同,见图1。车削中心的原点一般设在主轴端面与主轴轴线交汇处。机床参考点(换刀点)的位置由机床厂设定,Z 、X 方向拖板上相应位置安装有机械挡块。LJ 10MC X 方向机械挡块距主轴轴线500mm,Z 方向机械 挡块距主轴端面有四个位置,可供用户选择:640m m 、 800mm 、900m m 、1120mm 。而C K6432将机床坐标系的原点设置在参考点(换刀点)处。 在操作步骤上,开机后,都要执行 回零 操作。一旦X 、Z 回零 指示灯亮,CK6432的数控系统确定机床坐标系原点在当前位置,建立如图1(a)所示机床坐标系。而LJ-10MC 的数控系统则通过事先输入的参考点在机床坐标系中的坐标值,建立如图1(b)所示机床坐标系。 图1 X-Z 机床坐标系,X -Z 工作坐标系 两种不同的原点设置方式,主要影响对刀和工件坐标系设定这两步操作。 车削中心的原点设置方式,与人们对车床加工的习惯性理解是一致的,而且对数控车床的使用带来了很多方便。 图2 对刀仪示意图刀具种类,规格繁多,在刀架上的安装位置每次又不尽相同,必须进行X 、Z 方向刀具长度补偿。最方便的就是使用对刀仪。Z 轴 零点 是主轴端面,X 轴 零点 是主轴轴线,可以 通过一根精密芯棒体现。以此为基准,精确测定对刀仪所有测头在机床坐标系中的X 或Z 坐标值。当刀尖沿X (或Z)方向与测头接触后,根据测头X (或Z)坐标、刀架X (或Z)坐标,就可确定刀具在X (或Z)方向的补偿值。 数控车床加工,编程工作在工件坐标系中完成。工件坐标系坐标同机床坐标系,原点多设在轴线右端面与轴线交汇处。除非使用机械手,或设置定位元件,工件装夹位置在机床上并不固定,必须确定工件坐标系原点在机床坐标系中的位置,并将此值输入数控系 (下转第44页)
LG马扎克数控车床刀塔原点设置
LGMAZAK伺服刀塔原点丢失故障处理方法 4.1 利用操作面板和软体键来恢复原点 利用操作面板和软体键来恢复原点的处理步骤如下: (1)在手动状态下,按“刀箱拆散”使刀塔处于松开状态。 (2)同时按“MACHINE”→“OPTION”→“MFI+TURRET MODE”,使“TuRRET MODE”菜单反转显示。 (3)按手动转动刀具让刀具编号1的位置向主轴中心线方向移动。通过目测使刀盘和刀塔底座的上面基本对正。在操作过程中最好把1号刀装上中心钻,这样便于对正位置。 (4)再次选择“TURRET MODE”,使反转解除。 (5)选择“刀箱拆散”,将刀塔锁紧,此时要确认刀塔是否能顺利锁紧。锁紧时,如果发出异常声音或者振动时,需从步骤(1)开始重新操作。 (6)再次选择“刀箱拆散”使刀塔处于松开状态。 (7)再次同时按“MFI+TURRET MODE”,使菜单反显。 (8)选中“POSlTlON SET”,然后按刀塔旋转按扭,刀塔旋转.到达最初位置时会自动停止,参考点绝对位置即可确定。 (9)执行步骤(6)。 (10)执行步骤(4)。 (11)执行步骤(5)。 (12)选择“TURRET MODE”,使反转解除。 (13)选择“刀箱拆散”,将刀塔锁紧。 (14)关NC电源,断总电源开关。 再度通电,确认刀塔转动是否正常。 4.2 利用MR—J2—100CT软件来恢复原点 利用软件设定刀塔原点,需要知道刀塔丢失的是机械原点还是电气原点。电气原点丢失是非法断电引起的机床记忆原点丢失,刀塔实际机械位置正确;机械原点丢失是刀塔实际机械位置偏离。 4.2.1 电气原点设定 电气原点设定步骤如下: (1)在HOME模式下点刀箱拆散,使之红色反衬显示。 (2)将鼠标置于位置画面左下角,调出Windows(开始]菜单.按顺序选择[程序]→(MR—J2
双转台五轴联动数控机床对刀方法介绍
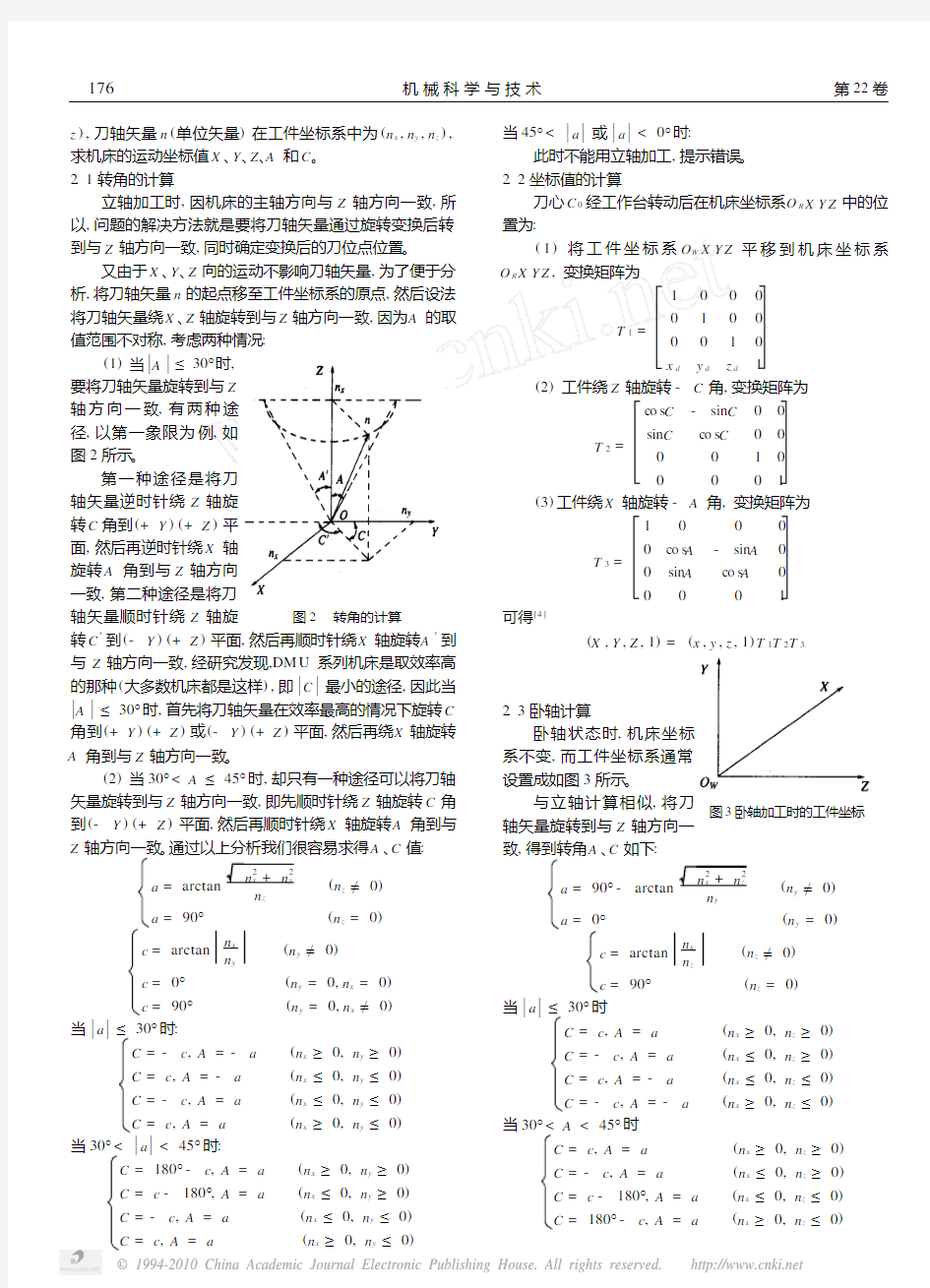
双转台五轴联动数控机床对刀方法介绍 发表时间:2014/8/5 作者:易军 关键字:双转台五轴联动数控机床对刀 投稿收藏好文推荐打印 轴联动数控机床是高效率、高精度加工空间曲面类零件。般将双转台的旋转轴线的交点作为加工坐标原点。双转台机床的对刀也就是要找到双转台旋转轴线的交点。轴联动,双转台五轴联动数控机床对刀方法介绍。 一引言 装备制造业是一国工业之基石,它为新技术、新产品的开发和现代工业生产提供重要的手段,是不可或缺的战略性产业。即使是发达工业化国家,也无不高度重视。近年来,随着我国国民经济迅速发展和国防建设的需要,对高档的数控机床提出了急迫的大量需求。五轴联动数控机床是高效率、高精度加工空间曲面类零件,如各类模具、水轮机和汽轮机叶片、三元流离心压气机、船用螺旋桨和推进器及螺旋锥齿轮的关键设备。代表机床制造业最高境界,从某种意义上说,也反映了一个国家的工业发展水平状况。 二双转台五轴联动数控机床结构 图1-1 双转台五轴联动机床结构简图 双转台五轴联动数控机床运动坐标包括3个移动坐标X、Y、 Z和两个个旋转坐标B、C(两个旋转轴均属转台类),B轴旋转平面为YZ平面,C轴旋转平面为XY平面。一般两个旋转轴结合为一个整体构成双转台结构,放置在工作台面上。( 3+2轴)。其特点是:加工过程中工作台旋转并摆动,可加工工件的尺寸受转台尺寸的限制,适合加工体积小、重量轻的工件;主轴始终为竖直方向,刚性比较好,可以进行切削量较大的加工。 三双转台五轴联动数控机床对刀方法 对刀的概念就是将编程坐标系和机床操作中的加工坐标 系重合起来,机床就会按照编写的程序进行加工。双转台五 轴机床的加工坐标,一般将双转台的旋转轴线的交点作为加工坐标原点,因此,双转台机床的对刀也就是要找到双转台旋转轴线的交点,加工原点的X、Y、Z轴坐标均由转台旋转轴线交点确定。 1.校正双转台
FANUC数控机床机械原点的设置及回零常见故障分析
F A N U C数控机床机械原点的设置及回零常见 故障分析 集团文件版本号:(M928-T898-M248-WU2669-I2896-DQ586-M1988)
FANUC数控机床机械原点的设置及回零常见故障分析 当前大多数数控机床均采用通过减速档块的方式回零,但谊方式在日常使用中故障率却艰高,有时甚至出现机械原点的丢失。本文以FANUC系统的台中精机VCENTER-70加工中心为例浅析了数控机床机械原点的设置方法,并对该类数控机床常见回零故障的各种形式式进行了分析与总结。 机械原点是机床生产厂家在生产机床时任机床上设置的一个物理位置,可以使控制系统和机床能够同步,从而建立起一个用于测量机床运动坐标的起始位置点,通常也是程序坐标的参考点。大多数机床在开机后都需要回零即回机械原点的操作。本文以FANUC系统的台中精机VCENTER-70加工中心为例浅析了数控机床机械原点的设置方法,并对此类数控机床常见回零故障的各种形武进行了分析与总结。 1 机械原点设置 1.1 机械原点丢失的原因 台中精机生产的VCENTER-70加工中心采用增量编码器作为机床位置的检测装置。系统断电后,工件坐标系的坐标值就会失去记忆,尽管靠电池能够维持坐标值的记忆,但只是记忆机床断电前的坐标值而不是机床的实际位置,所以机床首次开机后要进行返回参考点操作。而当系统断电遇到电池没电或特殊情况失电时,就会造成机械原点的丢失.从而使机床回参考点失败而无法正常工作。此时机床会产生。#306 n轴电池电压0#的报警信息,并且还会产生机械坐标丢失报警。#300第n轴原点复位要求”(n代指X、Y、Z)。
五轴联动数控机床技术现状与发展趋势
万方数据
万方数据
万方数据
五轴联动数控机床技术现状与发展趋势 作者:梁铖, 刘建群, Liang Cheng, Liu Jianqun 作者单位:广东工业大学机械电子学院,广州,510006 刊名: 机械制造 英文刊名:MACHINERY 年,卷(期):2010,48(1) 被引用次数:3次 参考文献(15条) 1.范超毅透过CIMT2007看五轴联动加工机床的发展[期刊论文]-机床与液压 2008(08) 2.林胜五轴数控机床发展及应用 2005(41) 3.蕊阳机床工业亟须发展五轴数控技术 2003(04) 4.匿名我国数控机床技术发展与展望[期刊论文]-机械工程师 2007(02) 5.中国机床工具工业协会市场部CIMT精品荟萃[期刊论文]-世界制造技术与装备市场 2007(02) 6.沈福金更加灵巧的铣头 2008(04) 7.杨红华数控机床技术发展现状[期刊论文]-湖南农机 2008(05) 8.李东茹我国数控技术发展与展望[期刊论文]-世界制造技术与装备市场 2006(01) 9.郑东喜;邹传平浅析数控机床的发展趋势及国内形势 2006(23) 10.吴志衡;徐旋波数控机床技术发展趋势[期刊论文]-机电工程技术 2004(09) 11.安胜谈我国数控机床技术发展趋势[期刊论文]-农机使用与维修 2007(06) 12.盛博浩;唐华数控机床技术发展浅析[期刊论文]-航空制造技术 2002(06) 13.沈福金加工中心的主要发展动向一第23届日本国际机床展(JIMTOF2006)评述[期刊论文]-航空制造 2007(02) 14.樊小年数控技术的应用与发展趋势初探 2005(02) 15.孙杰数控机床技术发展趋势[期刊论文]-内蒙古科技与经济 2007(22) 本文读者也读过(2条) 1.杜玉湘.陆启建.刘明灯.DU Yu-xiang.LU Qi-jian.LIU MING-deng五轴联动数控机床的结构和应用[期刊论文]-机械制造与自动化2008,37(3) 2.张惠敏.ZHANG Huimin五轴联动数控机床的设计[期刊论文]-机床与液压2010,38(8) 引证文献(3条) 1.孙杰.金珊经济型五轴数控机床后置处理系统研究与应用[期刊论文]-制造技术与机床 2011(10) 2.唐勇关于我国数控机床行业发展之路的探讨[期刊论文]-科技创新导报 2011(21) 3.Li LU.Shusheng LIU.Shenggen SHI.Jianzhong YANG An Open CAM System for Dentistry on the Basis of China-made 5-axis Simultaneous Contouring CNC Machine Tool and Industrial CAM Software[期刊论文]-华中科技大学学报(医学)(英德文版) 2011(5) 本文链接:https://www.360docs.net/doc/d4201668.html,/Periodical_jxzz201001002.aspx
数控机床机械原点丢失的恢复档
1.数控机床零点得有关概念 我们讨论得问题涉及到这样两个概念,机床原点与参考点,机床原点又称做机床零点,就是指由机床制造商设置在机床上得一个物理位置,其作用就是使机床与控制系统同步,建立测量机床运动坐标得起使点。机床参考点就是指为建立机床坐标系而在机床上专门设置得固定点。 机床参考点与机床原点得相对位置就是固定得,在机床出厂前由机床制造厂家经精密测量确定,并通过机床参数予以设置.机床执行返回参考点得运动就是建立坐标系得一方法,即在任何情况下,通过进行返回参考点运动,都可以使机床坐标轴运动到参考点并定位,系统自动以参考点为基准建立机床坐标系。机床坐标系一旦建立,在机床不断电、不急停得前提下机床坐标就保持不变. 因为参考点、机床原点位置都就是固定不变得.机床得软限位、螺距补偿、加工区域限制等功能均以之为基准才得以实现,同时也为机床自动换刀等辅助动作提供了一个定位基准. 2.目前数控机床回零得方式 (1)采用绝对编码器机床得回零方式采用绝对编码器检测数控机床位置时,系统断电后位置检测装置靠电池来维持坐标值实际位置得记忆,所以机床开机时,不需要进行返回参考点得操作。 (2)采用增量编码器机床得回零方式采用增量编码器检测机床位置时,系统断电后,工件坐标系得坐标值就失去记忆,机械坐标值尽管靠电池维持坐标值得记忆,但只就是记忆机床断电前得坐标值而不就是机床得实际位置,所以机床首次开机后要进行返回参考点得操作。 3.机床坐标原点得丢失 我们单位得FV80加工中心就是采用绝对编码器检测机床位置得,通常就是不需要进行返回参考点得操作,机床本身依靠记忆来保存坐标位置信息,其优点就是机床制造成本低、维修简单。但如果由于某种特殊原因使电池没电或就是系
五轴联动数控机床技术现状与发展趋势
五轴联动数控机床技术现 状与发展趋势 Last revision date: 13 December 2020.
五轴联动数控机床技术现状与发展趋势摘要:介绍五轴联动数控机床在工业加工中的优势和重要性,从国内、国外两个方面阐述目前五轴联动数控机床发展的现状,最后从目前机床工业发展动态出发展望五轴联动数控机床的发展趋势。 关键词:五轴联动数控机床技术现状发展趋势 Abstract:The advantages and impo~ance of five—axis CNC machine tools in industrial machining are presented. The status quo of development of five—axis CNC machine tools at home and abroad is described and their developing prospect given. Key Words:Five——axis CNC M achine Tools Technology Status Developing Trends[17] 一、简介 五轴联动数控机床是一种科技含量高、精密度高专门用于加工复杂曲面的机床,这种机床系统对一个国家的航空、航天、军事、科研、精密器械、高精医疗设备等等行业有着举足轻重的影响力。目前,五轴联动数控机床系统是解决叶轮、叶片、船用螺旋桨、重型发电机转子、汽轮机转子、大型柴油机曲轴等等加工的唯一手段。 二、国内外研究现状 陈则仕,张秋菊2005年提出一种五轴联动机器人运动学建模与仿真研究,探讨在VC++6.0集成编程环境下,调用OpenGL实现机器人的建模与仿真。对一种五轴联动机器人首先建立几何模型,对其正逆运动学问题进行分析求解,然后建立友好人机交互界面,对机器人示教再现过程进行模拟,最终实现 让机器人走空间直线路径的轨迹规划仿真[1]。该方法为五轴联动机器人研究开 辟新的道路,为五轴联动机器人的实用化做好理论实践经验。 赵世田,孙殿柱,孙肖霞2006年提出基于UG/POST五轴联动加工中心专用后置处理器的研发,通过结舍UG/Post Builder后置处理器开发工具和上述后置处理算法,开发了该机床的专用后置处理器,并通过试验进一步验证了该 后置处理器的正确性和实用性[2]。 德国兹默曼公司2007年开发出FZ25龙门铣床,标志着Zimmermann(兹默曼)公司再次扩展了其高度专业化的五轴联动HSC龙门铣床的应用范围。FZ 25非常适合大工件的干式切削,尤其是轻型的复合材料的加工,例如碳纤维和 玻璃纤维强化塑料、环氧树脂、亚安酯、聚苯乙稀等[3]。 杜玉湘,陆启建,刘明灯2007年提出五轴联动数控机床的结构和应用,介绍了五轴联动数控机床的几种结构及其特点和发展趋势;阐述了几种五轴联动机床加工的加工造型、编程(CAD/CAM系统)及其优缺点;详细描述了五轴联动数控机床对数控系统的要求及四开公司五轴联动数控系统的关键参数;列举了 四开公司历年来参展的五轴联动数控机床及现场加工工件的情况[4]。
详解五轴联动数控加工编程与操作技术培训的发展前景
详解五轴联动数控加工编程与操作技术培训的发展前景 前景性发展分析 (中文学名:深圳卓越模具数控培训官网;英文学址:www.0755ug.com) 【内容摘要】目前cnc正向五轴cnc的方向发展.因为, 三轴已经不能满足现代化工业加工的要求, 加工复杂工件必须采用五轴才能达到加工要求,五轴cnc与三轴cnc相比, 它不仅能够满足用户的加工需求, 而且还可以帮助用户提高生产效率, 降低操作难度。五轴会慢慢取代三轴在工业加工的市场需求,五轴是未来的一个发展趋势。 【关键词】五轴数控 【文章分类号】Q34 【文章标识号】U19 五轴发展前景 目前cnc正向五轴cnc的方向发展.因为, 三轴已经不能满足现代化工业加工的要求, 加工复杂工件必须采用五轴才能达到加工要求,五轴cnc与三轴cnc相比, 它不仅能够满足用户的加工需求, 而且还可以帮助用户提高生产效率, 降低操作难度。五轴会慢慢取代三轴在工业加工的市场需求,五轴是未来的一个发展趋势。 而深圳卓越模具数控高级培训在cnc数控编程五轴教育培训中有着独特的优势,专门购进五轴联动机床实战,因此而吸引到了广大学员。深圳卓越模具数控高级培训负责人表示:五轴编程较三轴编程难点:首先,编程难度增加,三轴加工中心在加工时,刀轴方向是不会改变的,运动方式也有限,编程相对简单。五轴加工,由于刀具和工件的相互位置在加工过程中随时调整,刀轴方向不断改变,要注意干涉。其次,现在一般都用专门的编程软件进行辅助编程,我这里以UG为例;相对三轴,五轴加工编程很重要的两点:驱动方法和刀轴,这两项的设定很重要。另外,为完整切削要加工的面,避免过切或切削不完整,“指定部件”和“指定检查”也很重要。最后是,后处理,五轴比三轴复杂,要考虑的参数更多。所以,深圳卓越模具数控高级培训负责人建议大家如果想要学到真正的五轴编程技术,最好找个像深圳卓越模具数控高级培训这样负责任的培训机构进行学习。
完整word版,五轴联动加工中心
五轴联动数控机床 百科名片 五轴联运数控机床 五轴联动数控机床是一种科技含量高、精密度高专门用于加工复杂曲面的机床,这种机床系统对一个国家的航空、航天、军事、科研、精密器械、高精医疗设备等等行业有着举足轻重的影响力。目前,五轴联动数控机床系统是解决叶轮、叶片、船用螺旋桨、重型发电机转子、汽轮机转子、大型柴油机曲轴等等加工的唯一手段。 目录 简介 五轴机床的种类 五轴联动加工中心 国外五轴联动数控机历史及现状 五轴联动数控机床系统 编辑本段 简介 装备制造业是一国工业之基石,它为新技术、新产品的开发和现代工业生产提供重要的手段,是不可或缺的战略性产业。即使是发达工业化国家,也无不高度重视。近年来,随着我国国民经济迅速发展和国防建设的需要,对高档的数控机床提出了迫切的大量需求。机床是一个国家制造业水平的象征。而代表机床制造业最高境界的是五轴联动数控机床系统,从某种意义上说,它反映了一个国家的工业发展水平状况。长期以来,以美国为首的西方工业发达国家,一直把五轴联动数控机床系统作为重要的战略物资,实行出口许可证制度。特别是冷战时期,对中国、前苏联等社会主义阵营实行封锁禁运。爱好军事的朋友可能知道著名的“东芝事件”:上世纪末,日本东芝公司卖给前苏联几台五轴联动的数控铣床,结果让前苏联用于制造潜艇的推进螺旋桨,上了几个档次,使美国间谍船的声纳监听不到潜艇的声音了,所以美国以东芝公
司违反了战略物资禁运政策,要惩处东芝公司。 编辑本段 五轴机床的种类 有摇篮式、立式、卧式、NC工作台+NC分度头、NC工作台+90°B轴、NC工作台+45°B轴、NC工作台+ 通用卧式五轴联动数控机床 [1] A轴°、二轴NC 主轴等。 编辑本段 五轴联动加工中心 五轴联动加工中心有高效率、高精度的特点,工件一次装夹就可完成五面体的加工。若配以五轴联动的高档数控系统,还可以对复杂的空间曲面进行高精度加工,更能够适应像汽车零部件、飞机结构件等现代模具的加工。立式五轴加工中心的回转轴有两种方式,一种是工作台回转轴,设置在床身上的工作台可以环绕X轴回转,定义为A轴,A轴一般工作范围+30度至-120度。工作台的中间还设有一个回转台,在图示的位置上环绕Z轴回转,定义为C轴,C轴都是360度回转。这样通过A轴与C 轴的组合,固定在工作台上的工件除了底面之外,其余的五个面都可以由立式主轴进行加工。A轴和C轴最小分度值一般为0.001度,这样又可以把工件细分成任意角度,加工出倾斜面、倾斜孔等。A轴和C轴如与XYZ三直线轴实现联动,就可加工出复杂的空间曲面,当然这需要高档的数控系统、伺服系统以及软件的支持。这种设置方式的优点是主轴的结构比较简单,主轴刚性非常好,制造成本比较低。但一般工作台不能设计太大,承重也较小,特别是当A轴回转大于等于90度时,工件切削时会对工作台带来很大的承载力矩。另一种是依靠立式主轴头的回转。主轴前端是一个回转头,能自行环绕Z轴360度,成为C轴,回转头上还有带可环绕X轴旋转的A轴,一般可达±90度以上,实现上述同样的功能。这种设置方式的优点是主轴加工非常灵
五轴联动数控机床加工中心基本知识介绍
五轴联动数控机床加工中心基本知识介绍 几十年来,人们普遍认为五轴数控加工技术是加工连续、平滑、复杂曲面的惟一手段。一旦人们在设计、制造复杂曲面遇到无法解决的难题,就会求助五轴加工技术。早在20世纪60年代,国外航空工业生产中就开始采用五轴数控铣床。目前五轴数控机床的应用仍然局限于航空、航天及其相关工业。 五轴联动数控是数控技术中难度最大、应用范围最广的技术,它集计算机控制、高性能伺服驱动和精密加工技术于一体,应用于复杂曲面的高效、精密、自动化加工。国际上把五轴联动数控技术作为一个国家生产设备自动化水平的标志。由于其特殊的地位,特别是对于航空、航天、军事工业的重要影响,以及技术上的复杂性,西方工业发达国家一直把五轴数控系统作为战略物资实行出口许可证制度,对我国实行禁运。因而,研究五轴数控加工技术对国家科技力量和综合国力的提高有重要意义。 符合数控机床发展的新方向 近几年国际、国内机床展表明,数控机床正朝着高速度、高精度、复合化的方向发展。复合化的目标是在一台机床上利用一次装夹完成大部分或全部切削加工,以保证工件的位置精度,提高加工效率。国外数控镗铣床、加工中心为适应多面体和曲面零件加工,均采用多轴加工技术,包括五轴联动功能。在加工中心上扩展五轴联动功能,可大大提高加工中心的加工能力,便于系统的进一步集成化。最近国际机床业出现了一个新概念,即万能加工,数控机床既能车削又能进行五轴铣削加工。五轴数控机床在国内外的实际应用表明,其加工效率相当于两台三轴机床,甚至可以完全省去某些大型自动化生产流水线的投资,大大节约了占地空间和工件在不同制造单元之间的周转运输的时间和花费。 发展和推广的难点及阻力何在 显然,人们早已认识到五轴数控技术的优越性和重要性。但到目前为止,五轴数控技术的应用仍然局限于少数资金雄厚的部门,并且仍然存在尚未解决的难题。五轴数控技术为何久久未能得以广泛普及?五轴数控加工由于干涉和刀具在加工空间的位姿控制,其数控编程、数控系统和机床结构远比三轴机床复杂得多。目前,五轴数控技术在全球范围内普遍存在以下问题。 五轴数控编程抽象、操作困难 这是每一个传统数控编程人员都深感头疼的问题。三轴机床只有直线坐标轴,而五轴数控机床结构形式多样;同一段NC代码可以在不同的三轴数控机床上获得同样的加工效果,但某一种五轴机床的NC代码却不能适用于所有类型的五轴机床。数控编程除了直线运动之外,还要协调旋转运动的相关计算,如旋转角度行程检验、非线性误差校核、刀具旋转运动计算等,处理的信息量很大,数控编程极其抽象。
五轴联动数控机床
五轴联动数控机床 五轴联动数控机床指的是一台机床上至少有五个坐标轴(三个直线坐标和两个旋转坐标),而且可以在计算机数控(CNC)系统的控制下同时协调运动进行加工。那这样的五轴联动数控加工与一般三轴数控加工相比优势在哪呢? 一、五轴联动数控机床可以加工一般三轴数控机床所不能加工或很难一次装夹完成加工的连续、平滑的自由曲面。如航空发动机和汽轮机的叶片,舰艇用的螺旋推进器,以及许许多多具有特殊曲面和复杂型腔、孔位的壳体和模具等,如用普通三轴数控机床加工,由于其刀具相对于工件的位姿角在加工过程中不能变,加工某些复杂自由曲面时,就有可能产生干涉或欠加工(即加工不到)。而用五轴联动数控机床加工时,则由于刀具/工件的位姿角在加工过程中随时可调整,就可以避免刀具工件的干涉并能一次装夹完成全部加工; 二、五轴联动数控机床可以提高空间自由曲面的加工精度、质量和效率。例如,三轴机床加工复杂曲面时,多采用球头铣刀,球头铣刀是以点接触成形,切削效率低,而且刀具/工件位姿角在加工过程中不能调,一般就很难保证用球头铣刀上的最佳切削点(即球头上线速度最高点)进行切削,而且有可能出现切削点落在球头刀上线速度等于零的旋转中心线上的情况。而采用五轴联动数控机床加工,由于刀具/工件位姿角随时可调,则不仅可以避免这种情况的发生,而且还可以时时充分利用刀具的最佳切削点来进行切削,或用线接触成形的螺旋立铣刀来代替点接触成形的球头铣刀,甚至还可以通过进一步优化刀具/工件的位姿角来进行铣削,从而获得更高的切削速度、切削线宽,即获得更高的切削效率和更好的加工表面质量; 三、模具加工的优势。在传统的模具加工中,一般用立式加工中心来完成工件的铣削加工。随着模具制造技术的不断发展,立式加工中心本身的一些弱点表现得越来越明显。现代模具加工普遍使用球头铣刀来加工,球头铣刀在模具加工中带来好处非常明显,但是如果用立式加工中心的话,其底面的线速度为零,这样底面的光洁度就很差,如果使用五轴联动数控机床技术加工模具,可以克服上述不足。采用五轴联动机床加工模具可以很快的完成模具加工,交货快,更好的保证模具的加工质量,使模具加工变得更加容易,并且使模具修改变得容易。
五轴联动数控加工中心的组成、结构、功能
五轴联动数控加工中心的组成、结构与功能 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 一、五轴联动数控加工中心的结构 五轴联动加工中心大多是3+2的结构,即x,y,z三个直线运动轴加上分别围绕x,y,z轴旋转的a,b,c三个旋转轴中的两个旋转轴组成。 这样,从大的方面分类,就有x,y,z,a,b;x,y,z,a,c;x,y,z,b,c三种形式;由二个旋转轴的组合形式来分,大体上有双转台式、转台加上摆头式和双摆头式三种形式。 这三种结构形式由于物理上的原因,分别决定了机床的规格大小和加工对象的范围。其中,双转台结构的五轴联动机床由于在加工工件时工件需要在两个旋转方向运动,所以只适合加工小型零件,如小型整体涡轮、叶轮、小型精密模具等,由于结构最为简单,所以相对价格较为低廉,就应用来讲,这是数量最多的一类五轴联动数控机床。 转台加上摆头式结构的五轴联动机床由于转台可以是a轴、b轴或c轴,摆头也是一样,可以分别是a轴、b轴或c轴,所以转台加上摆头式结构的五轴联动机床可以有各种不同的组合,以适应不同的加工对象,如加工汽轮发电机的叶片,需要a轴加上b轴,其中a轴需要用尾座顶尖配合顶住工件,如果工件较长同时直径又细,则需要两头夹住并且拉伸工件来进行加工,当然这里一个必要条件是两个转台必须严格同步旋转;再如加工如图2所示零件,采用c轴加上b轴,由于工件仅在c轴上旋转运动,所以工件可以很小,也可以较大,直径范围可由几