FANUC常用PMC信号表

FANUC常用PMC信号表
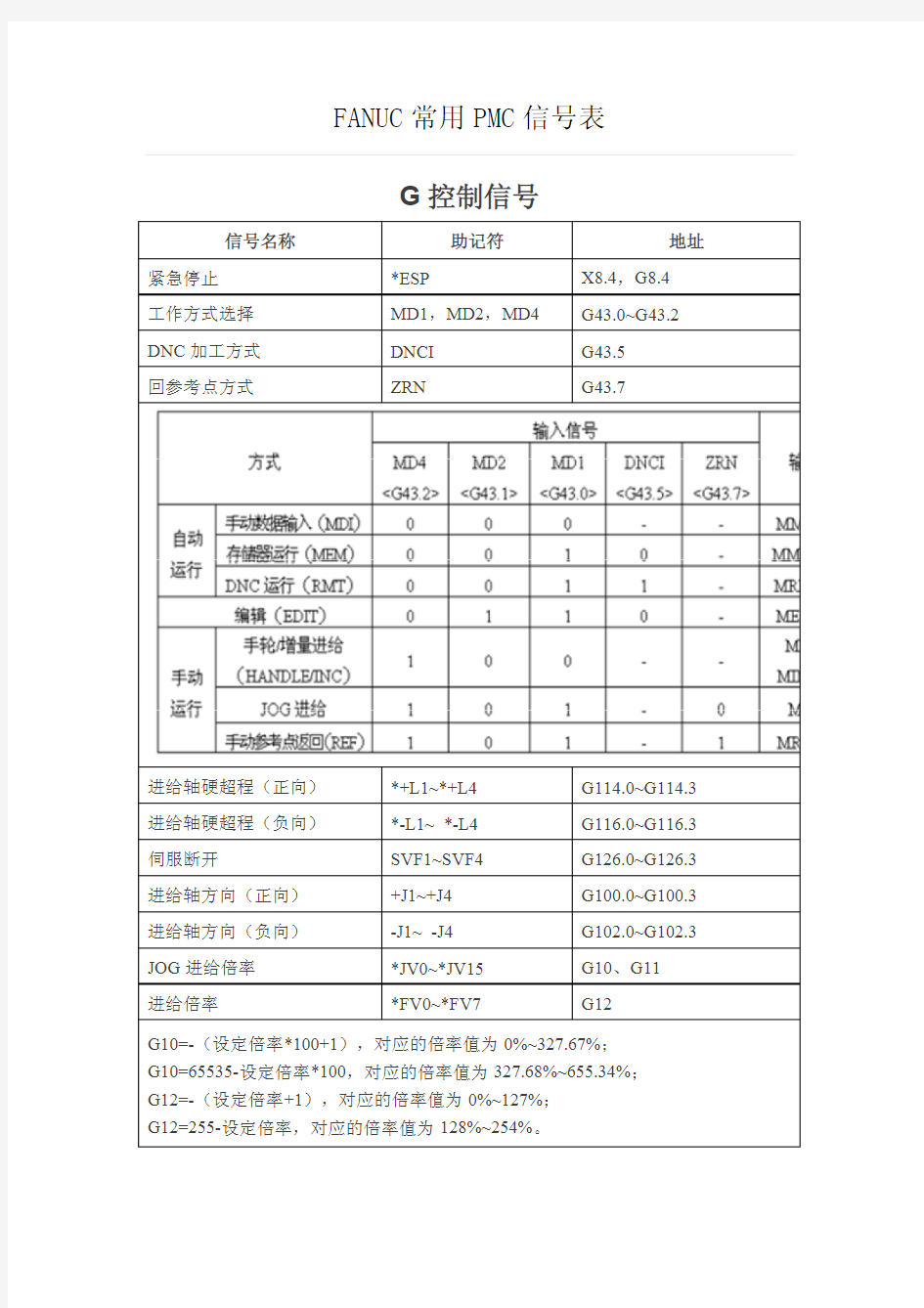
G控制信号
信号名称助记符地址紧急停止*ESP X8.4,G8.4
工作方式选择MD1,MD2,MD4G43.0~G43.2 DNC加工方式DNCI G43.5
回参考点方式ZRN G43.7
进给轴硬超程(正向)*+L1~*+L4G114.0~G114.3进给轴硬超程(负向)*-L1~ *-L4G116.0~G116.3伺服断开SVF1~SVF4G126.0~G126.3进给轴方向(正向)+J1~+J4G100.0~G100.3进给轴方向(负向)-J1~ -J4G102.0~G102.3 JOG进给倍率*JV0~*JV15G10、G11
进给倍率*FV0~*FV7G12
G10=-(设定倍率*100+1),对应的倍率值为0%~327.67%;
G10=65535-设定倍率*100,对应的倍率值为327.68%~655.34%;
G12=-(设定倍率+1),对应的倍率值为0%~127%;
G12=255-设定倍率,对应的倍率值为128%~254%。
快速进给倍率ROV1,ROV2G14.0、G14.1
手动快速进给RT G19.7
手轮进给轴选择HS1A~HS1D G18.0~G18.3
手轮进给/增量进给倍率MP1,MP2G19.4、G19.5
回零点减速*DEC1~*DEC4X1009.0~X1009.3循环启动ST G7.2
进给暂停*SP G8.5
单程序段运行SBK G46.1
空运行DRN G46.7
程序段选跳BDT G44.0、G45
程序再启动SRN G6.0
辅助功能锁住AFL G5.6
机床锁住MLK G44.1
各轴独立的机床锁住MLK1~MLK4G108.0~G108.3进给轴锁住*IT G8.0
进给轴分别锁住*IT1~*IT4G130.0~G130.3各轴各方向锁住(正向)+MIT1~+MIT4G132.0~G132.3各轴各方向锁住(负向)-MIT1~ -MIT4G134.0~G134.3启动锁住(车床专用)STLK G7.1
镜像加工MI1~MI4G106.0~G106.3程序保护KEY G46.3~G46.6辅助功能完成FIN G4.3
M功能完成信号MFIN G5.0
S功能完成信号SFIN G5.2
T功能完成信号TFIN G5.3
倍率无效OVC G6.4
倒带RRW G8.6
外部复位ERS G8.7
工件号检索PN1,PN2,PN4,PN8,
PN16
G9.0~G9.4
跳转SKIP X4.7
模拟主轴实际传动级GR1,GR2G28.1、G28.2齿轮挡位选择GR21G29.0
主轴转速到达SAR G29.4
主轴定向SOR G29.5
主轴停止转动*SSTP G29.6
主轴转速倍率SOV0~SOV7G30
第1串行主轴选择SWS1G27.0
第1串行主轴停止*SSTP1G27.3
串行主轴实际传动级CTH2A,CTH1A G70.2、G70.3串行主轴正转SFRA G70.5
串行主轴反转SRVA G70.4
串行主轴定向指令ORCMA G70.6
串行主轴准备好MRDYA G70.7
串行主轴报警复位ARSTA G71.0
串行主轴急停*ESPA G71.1
F状态信号
信号名称助记符地址NC准备好MA F1.7
伺服准备好SA F0.6
CNC复位RST F1.1
CNC报警AL F1.0
电池报警BAL F1.2
进给暂停中SPL F0.4
自动循环启动灯STL F0.5
自动(存储器)方式运行OP F0.7
增量进给方式MINC F3.0
手轮进给方式MH F3.1
JOG进给方式MJ F3.2
MDI方式MMDI F3.3
DNC方式MRMT F3.4
存储器运行方式MMEM F3.5
编辑方式MEDT F3.6
示教方式MTCHIN F3.7
跳过任选程序段MBDT1、MBDT2~MBDT9F4.0、F5
机床锁住MMLK F4.1
单程序段MSBK F4.3
辅助功能锁住MAFL F4.4
手动返回参考点方式MREF F4.5
程序再启动SRNMV F2.4
空运行MDRN F2.7
手动回参考点结束ZP1~ZP4F94.0~F94.3
参考点建立ZRF1~ZRF4F120.0~F120.3
轴移动中MV1~MV4F102.0~ F102.3
轴到位INP1~INP4F104.0~ F104.3
轴运动方向MVD1~MVD4F106.0~ F106.3
镜像有效MMI1~MMI4F108.0~ F108.3
正向行程限位到达+OT1~+OT4F124.0~ F124.3
负向行程限位到达-OT1~ -OT4F126.0~ F126.3
插补脉冲分配结束DEN F1.3
M代码选通MF F7.0
S代码选通SF F7.2
T代码选通TF F7.3
M30,M02,M01,M00译码DM30, DM02, DM01, DM00F9.4, F9.5, F9.6, F9.7 M功能代码M00~M31F10~F13
S功能代码S00~S31F22~F25
T功能代码T00~T31F26~F29
主轴报警SPAL F35.0
第1串行主轴报警ALMA F45.0
第1串行主轴零速SSTA F45.1
第1串行主轴速度检测SDTA F45.2
第1串行主轴速度到达SARA F45.3
第1串行主轴定向完成ORARA F45.7
第1串行主轴编码器零位PC1DTA F47.0
绝对式编码器电池电压为零报警PBATZ F172.6
绝对式编码器电池电压低报警PBATL F172.7
FANUC数控系统技术概述
FANUC 数控系统简介 一、FANUC数控系统的发展 FANUC 公司创建于1956年,1959年首先推出了电液步进电机,在后来的若干年中逐步发展并完善了以硬件为主的开环数控系统。进入70年代,微电子技术、功率电子技术,尤其是计算技术得到了飞速发展,FANUC公司毅然舍弃了使其发家的电液步进电机数控产品,一方面从GETTES公司引进直流伺服电机制造技术。1976年FANUC公司研制成功数控系统5,随时后又与SIEMENS 公司联合研制了具有先进水平的数控系统7,从这时起,FANUC公司逐步发展成为世界上最大的专业数控系统生产厂家,产品日新月异,年年翻新。 1979年研制出数控系统6,它是具备一般功能和部分高级功能的中档CNC 系统,6M适合于铣床和加工中心;6T适合于车床。与过去机型比较,使用了大容量磁泡存储器,专用于大规模集成电路,元件总数减少了30%。它还备有用户自己制作的特有变量型子程序的用户宏程序。 1980年在系统6的基础上同时向抵挡和高档两个方向发展,研制了系统3和系统9。系统3是在系统6的基础上简化而形成的,体积小,成本低,容易组成机电一体化系统,适用于小型、廉价的机床。系统9是在系统6的基础上强化而形成的具备有高级性能的可变软件型CNC系统。通过变换软件可适应任何不同用途,尤其适合于加工复杂而昂贵的航空部件、要求高度可靠的多轴联动重型数控机床。 1984年FANUC公司又推出新型系列产品数控10系统、11系统和12系统。该系列产品在硬件方面做了较大改进,凡是能够集成的都作成大规模集成电路,其中包含了8000个门电路的专用大规模集成电路芯片有3种,其引出脚竟多达179个,另外的专用大规模集成电路芯片有4种,厚膜电路芯片22种;还有32位的高速处理器、4兆比特的磁泡存储器等,元件数比前期同类产品又减少30%。由于该系列采用了光导纤维技术,使过去在数控装置与机床以及控制面板之间的几百根电缆大幅度减少,提高了抗干扰性和可靠性。该系统在DNC方面能够实现主计算机与机床、工作台、机械手、搬运车等之间的各类数据的双向传送。它的PLC装置使用了独特的无触点、无极性输出和大电流、高电压输出电路,能促使强电柜的半导体化。此外PLC的编程不仅可以使用梯形图语言,还可以使用PASCAL语言,便于用户自己开发软件。数控系统10、11、12还充实了专用宏功能、自动计划功能、自动刀具补偿功能、刀具寿命管理、彩色图形显示CRT 等。 1985年FANUC公司又推出了数控系统0,它的目标是体积小、价格代,适用于机电一体化的小型机床,因此它与适用于中、大型的系统10、11、12一起组成了这一时期的全新系列产品。在硬件组成以最少的元件数量发挥最高的效能为宗旨,采用了最新型高速高集成度处理器,共有专用大规模集成电路芯片6种,其中4种为低功耗CMOS专用大规模集成电路,专用的厚膜电路3种。三
传感器与信号处理电路习题答案
第1章 传感器与检测技术基础 1.某线性位移测量仪,当被测位移由4.5mm 变到5.0mm 时,位移测量仪的输出电压由3.5V 减至 2.5V ,求该仪器的灵敏度。 解:该仪器的灵敏度为 25 .40.55.35.2-=--=S V/mm 2.某测温系统由以下四个环节组成,各自的灵敏度如下: 铂电阻温度传感器: 0.45Ω/℃ 电桥: 0.02V/Ω 放大器: 100(放大倍数) 笔式记录仪: 0.2cm/V 求:(1)测温系统的总灵敏度; (2)记录仪笔尖位移4cm 时,所对应的温度变化值。 解: (1)测温系统的总灵敏度为 18.02.010002.045.0=???=S cm/℃ (2)记录仪笔尖位移4cm 时,所对应的温度变化值为 22.2218 .04==t ℃ 6.有三台测温仪表,量程均为0~800℃,精度等级分别为2.5级、2.0级和1.5级,现要测量500℃的温度,要求相对误差不超过2.5%,选那台仪表合理? 解:2.5级时的最大绝对误差值为20℃,测量500℃时的相对误差为4%;2.0级时的最大绝对误差值为16℃,测量500℃时的相对误差为3.2%;1.5级时的最大绝对误差值为12℃,测量500℃时的相对误差为2.4%。因此,应该选用1.5级的测温仪器。 10.试分析电压输出型直流电桥的输入与输出关系。 答:如图所示,电桥各臂的电阻分别为R 1、 R 2、 R 3、R 4。U 为电桥的直流电源电压。当四臂电阻R 1=R 2=R 3=R 4=R 时,称为等臂电桥;当R 1=R 2=R ,R 3=R 4=R ’(R ≠R ’)时,称为输出对称电桥;当R 1=R 4=R ,R 2=R 3 =R ’(R ≠R ’)时,称为电源对称电桥。 D 直流电桥电路 当电桥输出端接有放大器时,由于放大器的输入阻抗很高,所以可以认为电桥的负载电阻为无穷大,这时电桥
通信原理报告 数字基带信号HDB3码型编码转换实现
通信原理课程设计报告 题目:数字基带信号HDB3码型编码转换实现 专业班级: 姓名: 学号: 指导教师:
设计任务要求: 仿真实现数字基带通信系统信源输入24位二进制序列产生HDB3码,通过高斯白噪声信道,接收端滤波、解码的时域图及频谱图。以矩形波为例,要求实现输入24位二进制序列产生AMI码,HDB3码,接收端滤波、解码上述码型。
摘要 HDB3码全称三阶高密度双极性码(英语:High Density Bipolar of Order 3,简称:HDB3码)是一种适用于基带传输的编码方式,它是为了克服AMI码的缺点而出现的,具有能量分散,抗破坏性强等特点。HDB3码实行转换一般分为三个步骤,先将消息码转换AMI码然后加“V”,接着加“B”,这几部我们可以使用C语言进行编程实现。为了实现HDB3码的编码与转换,同时加深对通信系统工作原理的了解,我们采用了MATLAB软件进行编码仿真,同时学习掌握MATLAB软件的基础使用。 关键词:AMI码;HDB3码;编码;解码;MATLAB;仿真
目录 1. 设计原理 (4) 1.1 HDB3码的介绍 (4) 1.2 HDB3码的编码转换规则 (5) 1.3 HDB3码的解码转换规则 (5) 1.4 HDB3码的软件程序设计 (6) 2. MATLAB软件仿真结果及其分析 (10) 2.1 MATLAB软件的介绍 (10) 2.2 仿真结果图示 (12) 2.3 仿真结果分析 (15) 3. 设计总结及心得体会 (22) 4. 参考文献 (22) 5. 致谢 (23)
正文 1.设计原理 1.1 HDB3码的介绍 HDB3码即三阶高密度双极性码(英语:High Density Bipolar of Order 3,简称:HDB3码)是一种适用于基带传输的编码方式,“三阶”通俗讲就是最多3个连0码元,“高密度双极性”就是没有直流分量,不会连续出现+1或-1,它是为了克服AMI码的缺点而出现的,具有能量分散,抗破坏性强等特点。 三阶高密度双极性码用于所有层次的欧洲E-carrier系统,HDB3码将4个连续的"0"位元取代成"000V"或"B00V"。这个做法可以确保连续的相隔单数的一般B记号。 1.2 HDB3的编码转换规则 HDB3码的编码规则主要分为3步: 1 .先将消息代码变换成AMI码,若AMI码中连0的个数小于4,此时的AMI 码就是HDB3码; 2 .若AMI码中连0的个数大于等于4,则将每4个连0小段的第4个0变换成与前一个非0符号(+1或-1)同极性的符号,用表示(+V,-V);
几种常见传感器总结
几种常见传感器总结 1、红外对管: 红外对管是根据红外辐射式传感器原理制作的一种红外对射式传感器。与一般红外传感器一样,红外对管也由三部分构成:光学系统(发射管)、探测器(接收管)、信号调理及输出电路。红外探测器是利用红外辐射与物质相互作用所呈现的物理效应来探测红外辐射的。在此接收管通过对发射管所发出的红外线做出反应实现,实现信号的采集,再通过后续信号处理电路完成信号的采集和输出。 2、霍尔传感器: 霍尔传感器是基于霍尔效应的一种传感器。霍尔效应是指置于磁场中的静止载流导体, 当它的电流方向与磁场方向不一致时, 载流导体上平行于电流和磁场方向上的两个面之间产生电动势的现象。该电势称霍尔电势。霍尔传感器是利用霍尔效应实现磁电转换的一种传感器,它具有灵敏度高,线性度好,稳定性高、体积小和耐高温等特点。对测速装置的要求是分辨能力强、高精度和尽可能短的检测时间。目前市场上的霍尔传感器都是集成了外围的测量电路输出的是数字信号,即当传感器检测到磁场时将输出高低电平信号。传感器主要包括两部分,一为检测部分的霍尔元件,一为提供磁场的磁钢。霍尔电流传感器反应速度一般在7微妙,根本不用考虑单片机循环判断的时间. 3、光电开关: 光电开关是一种利用感光元件对变化的入射光加以接收, 并进行光电转换, 同时加以某种形式的放大和控制, 从而获得最终的控制输出“开”、“关”信号的器件。上图为典型的光电开关结构图。是一种反射式的光电开关,它的发光元件和接收元件的光轴在同一平面且以某一角度相交,交点一般即为待测物所在处。当有物体经过时, 接收元件将接收到从物体表面反射的光, 没有物体时则接收不到。透射式的光电开关, 它的发光元件和接收元件的光轴是重合的。当不透明的物体位于或经过它们之间时, 会阻断光路, 使接收元件接收不到来自发光元件的光, 这样起到检测作用。光电开关的特点是小型、高速、非接触, 而且与TTL、MOS等电路容易结合。此类传感器目前也多为开关量传感器,输出的为1,0开关量信号,可以和单片机直接连接使用。光电开关广泛应用于工业控制、自动化包装线及安全装置中作光控制和光探测装置。可在自控系统中用作物体检测,产品计数, 料位检测,尺寸控制,安全报警及计算机输入接口等用途。 4、超声波传感器: 利用超声波在超声场中的物理特性和各种效应而研制的装置可称为超声波换能器、探测器或传感器。超声波探头按其工作原理可分为压电式、磁致伸缩式、电磁式等, 而以压电式最为常用。压电式超声波探头常用的材料是压电晶体和压电陶瓷, 这种传感器统称为压电式超声波探头。它是利用压电材料的压电效应来工作的: 逆压电效应将高频电振动转换成高频机械振动, 从而产生超声波, 可作为发射探头; 而利用正压电效应, 将超声振动波转换成电信号, 可用为接收探头。超声波探头主要由压电晶片组成,既可以发射超声波,也可以接收超声
各种传感器的分类、比较和应用
传感器的定义传感器是一种能把物理量或化学量转变成便于利用的电信号的器件。国际电工委员会(IEC:International Electrotechnical Committee)的定义为:“传感器是测量系统中的一种前置部件,它将输入变量转换成可供测量的信号”。按照Gopel等的说法是:“传感器是包括承载体和电路连接的敏感元件”,而“传感器系统则是组合有某种信息处理(模拟或数字)能力的系统”。传感器是传感系统的一个组成部分,它是被测量信号输入的第一道关口。 传感器把某种形式的能量转换成另一种形式的能量。有两类:有源的和无源的。有源传感器能将一种能量形式直接转变成另一种,不需要外接的能源或激励源。 无源传感器不能直接转换能量形式,但它能控制从另一输入端输入的能量或激励能,传感器承担将某个对象或过程的特定特性转换成数量的工作。其“对象”可以是固体、液体或气体,而它们的状态可以是静态的,也可以是动态(即过程)的。对象特性被转换量化后可以通过多种方式检测。对象的特性可以是物理性质的,也可以是化学性质的。按照其工作原理,它将对象特性或状态参数转换成可测定的电学量,然后将此电信号分离出来,送入传感器系统加以评测或标示。 传感器原理结构在一段特制的弹性轴上粘贴上专用的测扭应片并组成变桥,即为基础扭矩传感器;在轴上固定着:(1)能源环形变压器的次级线圈,(2)信号环形变压器初级线圈,(3)轴上印刷电路板,电路板上包含整流稳定电源、仪表放大电路、V/F变换电路及信号输出电路。在传感器的外壳上固定着: (1)激磁电路,(2)能源环形变压器的初级线圈(输入),(3) 信号环形变压器次级线圈(输出),(4)信号处理电路 工作过程 向传感器提供±15V电源,激磁电路中的晶体振荡器产生400Hz的方波,经过TDA2030功率放大器即产生交流激磁功率电源,通过能源环形变压器T1从静止的初级线圈传递至旋转的次级线圈,得到的交流电源通过轴上的整流滤波电路得到±5V的直流电源,该电源做运算放大器AD822的工作电源;由基准电源AD589与双运放AD822组成的高精度稳压电源产生±4.5V的精密直流电源,该电源既作为电桥电源,又作为放大器及V/F转换器的工作电源。当弹性轴受扭时,应变桥检测得到的mV级的应变信号通过仪表放大器AD620放大成 1.5v±1v的强信号,再通过V/F转换器LM131变换成频率信号,通过信号环形变压器T2 从旋转的初级线圈传递至静止次级线圈,再经过外壳上的信号处理电路滤波、整形即可得到与弹性轴承受的扭矩成正比的频率信号,该信号为TTL电平,既可提供给专用二次仪表或频率计显示也可直接送计算机处理。由于该旋转变压器动--静环之间只有零点几毫米的间隙,加之传感器轴上部分都密封在金属外壳之内,形成有效的屏蔽,因此具有很强的抗干扰能力。 传感器分类倾角传感器 倾角传感器在军事、航天航空、工业自动化、工程机械、铁路机车、消费电子、海洋船舶等领域得到广泛运用。辉格公司为国内用户提供全球最全面、最专业的产品方案和服务。提供超过500种规格的伺服型、电解质型、电容型、电感型、光纤型等原理的倾角传感器。 加速度传感器(线和角加速度)
通信原理报告数字基带信号HDB3码型编码转换实现
通信原理课程设计报告题目:数字基带信号HDB3码型编码转换实现 专业班级: 姓名: 学号:
指导教师: 设计任务要求: 仿真实现数字基带通信系统信源输入24位二进制序列产生HDB3码,通过高斯白噪声信道,接收端滤波、解码的时域图及频谱图。以矩形波为例,要现输入24位二进制序列产生AMI码,HDB3码,接收端滤波、解码上述码型。
摘要 HDB3码全称三阶高密度双极性码(英语:High Density Bipolar of Order 3,简称:HDB3码)是一种适用于基带传输的编
码方式,它是为了克服AMI码的缺点而出现的,具有能量分散,抗破坏性强等特点。HDB3码实行转换一般分为三个步骤,先将消息码转换AMI码然后加“V”,接着加“B”,这几部我们可以使用C语言进行编程实现。为了实现HDB3码的编码与转换,同时加深对通信系统工作原理的了解,我们采用了MATLAB软件进行编码仿真,同时学习掌握MATLAB软件的基础使用。 关键词:AMI码;HDB3码;编码;解码;MATLAB;仿真 目录 1. 设计原理 (4) 1.1 HDB3码的介绍 (4)
1.2 HDB3码的编码转换规则 (5) 1.3 HDB3码的解码转换规则 (5) 1.4 HDB3码的软件程序设计 (6) 2. MATLAB软件仿真结果及其分析 (10) 2.1 MATLAB软件的介绍 (10) 2.2 仿真结果图示 (12) 2.3 仿真结果分析 (15) 3. 设计总结及心得体会 (22) 4. 参考文献 (22) 5. 致 (23)
正文 1.设计原理 1.1 HDB3码的介绍 HDB3码即三阶高密度双极性码(英语:High Density Bipolar of Order 3,简称:HDB3码)是一种适用于基带传输的编码方式,“三阶”通俗讲就是最多3个连0码元,“高密度双极性”就是没有直流分量,不会连续出现+1或-1,它是为了克服AMI码的缺点而出现的,具有能量分散,抗破坏性强等特点。 三阶高密度双极性码用于所有层次的欧洲E-carrier系统,HDB3码将4个连续的"0"位元取代成"000V"或"B00V"。这个做法可以确保连续的相隔单数的一般B记号。 1.2 HDB3的编码转换规则 HDB3码的编码规则主要分为3步: 1 .先将消息代码变换成AMI码,若AMI码中连0的个数小于4,此时的AMI 码就是HDB3码;
FANUC数控系统PMC功能的妙用完整版
F A N U C数控系统P M C功能的妙用标准化管理处编码[BBX968T-XBB8968-NNJ668-MM9N]
pmc 意思PMC与PLC分别是什么共同点和区别 PLC (Programmable Logic Controller)用于通用设备的自动控制,称为可编程控制器。PLC用于数控机床的外围辅助电气的控制,称为可编程序机床控制器(Programmable Machine Controller/Programmable Machine Tool Controller)。有些数控系统厂商,如FANUC,等将其称之为PMC,而另一些如SIEMENS,还是将其称之为PLC。 也就是说PMC是PLC的一个子集,某些厂商将专用于数控机床的PLC称为PMC,所以PMC 和PLC是非常相似的。与传统的继电器控制电路相比较,PMC的优点有:时间响应快,控制精度高,可靠性好,控制程序可随应用场合的不同而改变,与计算机的接口及维修方便。另外,由于PMC使用软件来实现控制,可以进行在线修改,所以有很大的灵活性,具备广泛的工业通用性。 你们的概念都十分模糊或者说干脆不懂。PLC是最基本的逻辑控制,为什么机床叫的PLC 叫PMC,M就是MACHINE,他体现出了区别,首先PLC 对外只有INPUT,OUTPUT的概念,而PMC增加了与数控系统的专用接口,FANUC用F和G地址来区分,SIEMENS用DB来区分,举个例子,比如主轴旋转指令,PLC处理时先有主轴旋转指令输入信号,然后根据逻辑要求处理完后直接有输出外围设备直接执行,而PMC有输入信号后,有可能要先传送到PMC 处理互锁信号(如卡盘夹紧,刀具锁紧,防护门关闭)然后PMC再将处理结果传送到数控系统专用地址,然后数控系统将指令发给伺服系统执行,数控系统如果执行或没有执行都要将信号在传送给PMC,PMC再处理执行或没有执行的输出。FANUC的PMC是属于专用的PLC,地址有详细的划分,不能独立出来使用。SIEMENS的PLC是以标准S7-300为基础的,他将一些必要的动作已经编辑好了标准功能块,如FC8是刀具管理,FC9同步子程序控制。FC13手轮单元控制,FC15是PMC控制轴定位等等功能。 、 PMC输出 (BEIJING FANUC 0i MC)
基带信号常用码型转换
通信原理大作业 用matlab仿真 1.幅频失真 S(t)=sint+1/3sin3t, S’(t)=sint+sin3t; 相频失真 S(t)=sint+1/3sin3t, S’(t)=sin(t+2pi)+1/3sin(3t+3pi). 程序: x=0:pi/20:3*pi; y1=sin(x)+(sin(3*x))/3; y2=sin(x)+sin(3*x); y3=sin(x+2*pi)+(sin(3*x+3*pi))/3; figure(1) plot(x,y1); hold on plot(x,y2,'r-'); legend('S(t)=sint+1/3sin3t','S(t)=sint+sin3t') figure(2) plot(x,y1); hold on plot(x,y3,'r-'); legend('S(t)=sint+1/3sin3t','S(t)=sin(t+2*pi)+1/3sin(3t+3*pi)')
幅频失真 相频失真
2. 将输入的一串0,1编码 1) 转换成AMI 码 2) 转换成HDB3码 3) 转换成双相码 4) 转换成Miller 码 5) 转换成CMI 码 总流程 开始 输入数组 依次显示五种码形 结束 转换成AMI 码 转换成CMI 码 转换成 HDB3 码 转换成双相码 转换成Miller 码
转化成五种码具体流程 思路:数组xn 中0保持不变;并统计1个数,当为偶数1保持不变;当为奇数1变换为-1 1) 转换成AMI 码 no no no 得到数组xn Xn (i )是否=1 num=num+1 num 是否为偶数 得到数组xn 长度k i=1; num=0 yn(i)=xn(i) yn(i)=xn(i) yn(i)= -xn(i) i 是否=k 得到数组yn i=i+1
实验3基带信号的常见码型变换
信息院 14电本 基带信号的常见码型变换实验 一、实验目的 1.熟悉RZ 、BNRZ 、BRZ 、CMI 、曼彻斯特、密勒、PST 码型变换原理及工作过程; 2.观察数字基带信号的码型变换测量点波形。 二、实验仪器 1.时钟与基带数据发生模块,位号:G 2.20M 双踪示波器1台 三、实验工作原理 在实际的基带传输系统中,传输码的结构应具有下列主要特性: 1) 相应的基带信号无直流分量,且低频分量少; 2) 便于从信号中提取定时信息; 3) 信号中高频分量尽量少,以节省传输频带并减少码间串扰; 4) 不受信息源统计特性的影响,即能适应于信息源的变化; 5) 编译码设备要尽可能简单 1.1 单极性不归零码(NRZ 码) 单极性不归零码中,二进制代码“1”用幅度为E 的正电平表示,“0”用零电平表示,单极性码中含有直流成分,而且不能直接提取同步信号。 0000 E +1111 图16-1 单极性不归零码 1.2 双极性不归零码(BNRZ 码) 二进制代码“1”、“0”分别用幅度相等的正负电平表示,当二进制代码“1”和“0”等概出现时无直流分量。 10111000E +E -0 图 16-2 双极性不归零码 1.3 单极性归零码(RZ 码) 单极性归零码与单极性不归零码的区别是码元宽度小于码元间隔,每个码元脉冲在下一个码元到来之前回到零电平。单极性码可以直接提取定时信息,仍然含有直流成分。
0000 1111E +0 图 16-3 单极性归零码 1.4 双极性归零码(BRZ 码) 它是双极性码的归零形式,每个码元脉冲在下一个码元到来之前回到零电平。 0000 1111E +0E - 图 16-4 双极性归零码 1.5 曼彻斯特码 曼彻斯特码又称为数字双相码,它用一个周期的正负对称方波表示“0”,而用其反相波形表示“1”。编码规则之一是:“0”码用“01”两位码表示,“1”码用“10”两位码表示。 例如: 消息代码: 1 1 0 0 1 0 1 1 0… 曼彻斯特码:10 10 01 01 10 01 10 10 01… 曼彻斯特码只有极性相反的两个电平,因为曼彻斯特码在每个码元中期的中心点都存在电平跳变,所以含有位定时信息,又因为正、负电平各一半,所以无直流分量。 0000 1111E +E -0 图 16-5 曼彻斯特编码 1.6 CMI 码 CMI 码是传号反转码的简称,与曼彻斯特码类似,也是一种双极性二电平码,其编码规则: “1”码交替的用“11“和”“00”两位码表示; “0”码固定的用“01”两位码表示。 例如: 消息代码:1 0 1 0 0 1 1 0… CMI 码: 11 01 00 01 01 11 00 01… 或: 00 01 11 01 01 00 11 01…
FANUC系统PMC编程.doc
FANUC系统 PMC 编程重点 FANUC系统的 PMC 在哪里呢我们似乎无法看见完全的 PMC。其实, FANUC PMC是典型的与CNC集成在一起的内装式 PLC,其 CPU和存储器就在 CNC控制单元的主板上。因此, FANUC PMC控制系统的硬件如图 1 所示。 I/O 单元与 PMC CPU通过接口JD1A/JD51A传输信号,而机床侧输入输出元件与 I/O 单元则通过接口 CB104、CB105、CB106、 CB107 传输信号。 图1 FANUC PMC硬件组成 相关实用书籍推荐
1 外部标准输入 / 输出信号 FANUC机床侧标准输入/ 输出信号接入电路如图 2 所示。输出信号电路中中间继电器线圈上要并联二极管,以便当线圈断电时,为感应电流提供放电回路,否则极易损坏驱动电路。这个二极管称为续流二极管。
图2 FANUC外部标准输入 / 输出信号 2 PMC 地址及信号种类 (1)地址表示 每个 PMC 输入 / 输出接口( interface )信号用地址( address)来区别。所谓地址是指与机床侧的输入 / 输出信号、与 CNC之间的输入 / 输出信号、内部继电器、计数器、保持型继电器、数据表等各信号的存在场所的号码。
PMC 地址由字节组成,即一个地址可以表示8 个信号。地址由地址号和位号组成,地址号的前面必须要有一个字母,它表示信号的种类。如图 3 所示。 图3 PMC 地址表示 某一个信号可以采用助记符(symbol)来方便记忆,如这个地址表示第 4 轴回参考点时的减速信号, *DEC4(通常是英文简写)就是其助记符;是紧停信号,*ESP就是其助记符。 (2)地址种类 FANUC PMC地址种类( address type )主要有 X、Y、G、F 等,如图 4 所示。 CNC 与 PMC 之间的 G、 F 信号及地址是由FANUC公司确定的,PMC 编程者只可使用不能改变。而CNC
数字基带传输常用码型的MATLAB表示
数字基带传输常用码型的MATLA表示 在某些具有低通特性的有线信道中,特别是传输距离较近的情况下,数字基带信号不经调制可以直接传输,这种系统称为数字基带系统。而具有调制解调过程的数字系统称为数字带通传输系统。在第七章中,将列举数字带通传输系统仿真的例子,在本章中,我们重点讨论数字基带常用码型的产生,即数字基带信号的产生。教材中,我们以单极性不归零码和单极性不归零码的实现作为参考。 单极性不归零码MATLA程序如下: function y=snrz(x) % 本函数实现输入二进制码,输出编号的单极性非归零码 % 输入x 为二进制码,输出y 为单极性非归零码 num=200; % 单极性非归零码每一个码元包含的点 t=0:1/num:length(x); for i=1:length(x); if x(i)==1; for j=1:num; y((i-1)*num+j)=1; % 对应的点赋值为1 end else for j=1:num; y((i-1)*num+j)=0; % 对应的点赋值为0 end end end y=[y,x(i)]; % 为了绘制图形,注意要将y 序列加最后一位 plot(t,y); grid on; axis([0 i -0.2 1.2]); title(' 单极性非归零码1 0 0 1 0 1'); % 绘图 在MATLA命令行窗口中键入x的值,并调用函数snrz(x),就可以得到对应的单极性不归零码。如输入以下指令,将出现图 1 所示的结果。
单极性不归零码MATLA 程序如下: fun ctio n y=srz(x) %本函数实现输入二进制码,输出编号的单极性归零码 %输入x 为二进制码,输出y 为单极性归零码 plot(t,y); grid on; axis([0 i -0.2 1.2]); title(' 单极性非归零码 1 0 0 1 0 1'); num=200; %单极性非归零码每 t=0:1/num:le ngth(x); for i=1:le ngth(x); if x(i)==1; for j=1: nu m/2; y((i*2-2)* num/2+j)=1; % y((i*2-1)*num/2+j)=0; % end else for j=1: num; y((i-1)*num+j)=0; % end end end y=[y,x(i)]; % 个码元包含的点 对1而言,前半部分时间值为1 对1而言,后半部分时间值为0 对应的点赋值为0 为了绘制图形,注意要将 y 序列加最后一位 单极性非归零码1 0 0 1 0 1 图1单极性不归零码
数字基带信号传输码型发生器设计
武汉理工大学《FPGA原理与应用》课程设计 课程设计任务书 学生姓名:蒋立豪专业班级:通信1303 指导教师:陈适工作单位:信息工程学院 题目: 数字基带信号传输码型发生器设计 初始条件: FPGA芯片(型号不限),ISE仿真软件。 要求完成的主要任务: (包括课程设计工作量及技术要求,以及说明书撰写 等具体要求) 要求每位选课同学提交一篇关于FPGA的应用设计报告,选择的FPGA芯片不限,选用的仿真工具不限。格式要求按照课程设计报告的标准格式完成,包括:常见的几种基带码: 1.单极性非归零码 2.双极性非归零码 3.单极性归零码 4.双极性归零码 5.差分码 6.交替极性码 7.分相码 8.编码信号反转码 指导教师签名:年月日 系主任(或责任教师)签名:年月日 武汉理工大学《FPGA原理与应用》课程设计
武汉理工大学《FPGA原理与应用》课程设计 摘要 数字通信是信息经编码变换处理后,以数字信号在信道上传输的,较之于模拟通信有很大的优点。数字通信有基带传输和频带传输两种方式,而基带传输系统在数字通信中有重要的代表性。在实际的基带传输系统中,并不是所有类型的基带电波形都能在信道中传输,因此,基带传输的传输码型变换是传输过程的重要环节,因此对于传输码型的设计有一定的要求。了解常用码型及存在的误码原因,对传输码型进行初步的研究。本文主要设计一个基于FPGA 的数字基带信号发生器,首先简要介绍了单极性非归零码、双极性非归零码、单极性归零码、双极性归零码、差分码、交替极性码、分相码、传号反转码等基带码的基本特点,然后根据码型转换原理设计发生器模块。由于EDA 技术可以简化电路,集成多块芯片,减小电路体积,所以程序采用VHDL 进行描述,并用ISE 软件仿真实现所有功能,最后将功能集成到FPGA 上,并设计电路,产生的基带码稳定、可靠,可满足不同数字基带系统传输需要。 关键词:数字通信,基带传输,EDA,VHDL,FPGA I 武汉理工大学《FPGA原理与应用》课程设计 Abstract Digital communication is information after processing, transform coding, to digital signal transmission in the channel. Compared with analog communication has great advantages. Digital communication baseband transmission and the transmission frequency band in two ways, and baseband transmission system in digital communication have an important representative. In the actual baseband transmission system, and not all types of baseband wave form can transmit in the channel, therefore, baseband transmission of the transmission code transformation is an
FANUCPMC培训
FANUC基础调试培训 1、FANUC PMC概要。 2、I/O硬件的联接和地址设定 3、PMC画面操作和设定 4、常用PMC应用案例
PMC概要
【CNC 与PMC】 CNC(Computerized Numerical Control:计算机控制的数控装置)和PLC (Programmable Logic Controller:可编程顺序逻辑控制器)的各项处理由几部分构成。 CNC 中系统的控制软件已安装完毕,只需要制作完成机械动作控制即可。PMC 是安装在CNC 内部负责机床控制的顺序控制器。
【PMC信号】 ?X:来自机床侧的输入信号。如接近开关、极限开关、压力开关、操作按钮等输入信号元件。PMC 接收从机床侧各装置的输入信号,在梯形图中进行逻辑运算,作为机床动作的条件及对外围设备进行诊断的依据。?Y:由PMC 输出到机床侧的信号。在PMC 控制程序中,根据机床设计的要求,输出信号控制机床侧的电磁阀、接触器、信号灯等动作,满足机床运行的需要。 ?F:由控制伺服电机与主轴电机的系统部分侧输入到PMC 信号。系统部分就是将伺服电机和主轴电机的状态,以及请求相关机床动作的信号(如移动中信号、位置检测信号、系统准备完成信号等),反馈到PMC 中去进行逻辑运算,作为机床动作的条件及进行自诊断的依据。 ?G:由PMC 侧输出到系统部分的信号。对系统部分进行控制和信息反馈(如轴互锁信号、M代码执行完毕信号等)。 ?R\E:内部继电器R、扩展继电器E。在顺序程序执行处理中使用于运算结果的暂时存储的地址。内部继电器的地址包含有PMC 的系统软件所使用的预留区,预留区的信号不能在顺序程序中写入。 ?A:信息显示的信号地址。顺序程序所使用的指令中,备有在CNC画面上进行信息显示的指令( DISPB ) ?非易失性存储器地址:定时器( T )、计数器( C )、保持型继电器( K )、数据表( D )在断电时要保持其中的值。这4 个叫做PMC 参数。PMC 参数的显示和设定方法请看“设定PMC 参数”部分。
数字基带信号及常用的编码
数字基带信号 1.1 基带信号的基本概念 数字基带信号可以来字计算机、电传机等终端数据的各种数字代码,也可以来自模拟信号经数字化处理后的脉冲编码(PCM)信号等,是未经载波信号调制而直接传输的信号,所占据的频谱从零频或很低频开始。 1.2 几种数字基带信号的基本波形 1.2.1 单极性波形 这是一种最简单的基带信号波形,用正电平和零电平分别表示对应二进制“1”和“0”,极性单一,易于用TTL 和CMOS 电路产生。缺点是有直流分量,要求传输线路具有直流传输能力,因而不适用有交流耦合的远距离传输,只适用于计算机内部或者极进距离的传输,信号波形图如图1-1所示。 1 011 100+E 图1-1 单极性波 1.2.2 双极性波形 这种波形用正、负电平的脉冲分别表示二进制代码“1”和“0”,其正负电平 的幅度相等、极性相反,当“1”和“0”等概率出现时无直流分量,有利于在信道中传输,并且在接受端恢复信号的判决电平为零,因而不熟信道特性的变化的影响,扛干扰能力也叫强,信号波形图如图1-2所示。 1 011 100+E -E 图1-2 双极性波 1.2.3 单极性归零波形 这种波形是指它的有电脉冲宽度τ小于码元Ts ,即信号电压在一个码元终止 时刻前总要回到零电平,通常归零波使用半占空码,即占空比(τ/Ts )为50%,从单极性波可以直接提取定时信息,是其他码型提取位同步信息时常采用的一种过渡波形。 1 011 100+E +E
图1-3 单极性归零波 1.2.4 双极性归零波形 这种波形兼有双极性和归零波形的特点,由于其相邻脉冲之间存在零电位的间隔,是的接受端很容易识别出每个码元的起止时间,从而使收发双方能保持位的同步。波形如图1-4所示。 1 011 100+E -E +E -E 图1-4 双极性归零波 1.2.5 差分波形 这种波形是用相邻码元的电平的跳变和不变来表示消息代码,而与码元本身的点位或极性无关,电平跳变表示“1”,电平的不变表示“0”,当然这种规定也可以反过来,也称为相对码波形,而相应地称前面的单极性或双极性波形为绝对码波形,这种波形传输代码可以消除设备初始状态的影响。波形如图1-5所示。 1 011 100+E -E +E -E 图1-5 差分波形 1.2.6 多电平波形 上述波形的电平取值只有两种,即一个二进制码对应一个脉冲,为了提高频带利用率,可以采用多电平波形或多值波形。其编码规则是,用多个二进制码表示一个脉冲。在波特率相同(传输带宽相同)的条件下,比特率提高了,因此多电平波形在频带受限的告诉数据传输系统中得到了广泛的应用。 表示信息码元的单个脉冲的波形并非一定是矩形的,根据实际情况,还可以是高斯脉冲、升余弦脉冲等其他形式。
实验1 基带信号的常用码型变换实验
实验1 基带信号的常用码型变换实验 一、实验目的 1.熟悉RZ 、BNRZ 、BRZ 、CMI 、曼彻斯特、密勒码型变换原理及工作过程; 2.观察数字基带信号的码型变换测量点波形; 二、实验仪器 1.AMI/HDB3编译码模块,位号:F (实物图片如下) 2.时钟与基带数据发生模块,位号:G 3.20M 双踪示波器1台 4.信号连接线3根 三、实验工作原理 (一)基带信号及其常用码型变换 在实际的基带传输系统中,传输码的结构应具有下列主要特性: 1) 相应的基带信号无直流分量,且低频分量少; 2) 便于从信号中提取定时信息; 3) 信号中高频分量尽量少,以节省传输频带并减少码间串扰; 4) 不受信息源统计特性的影响,即能适应于信息源的变化; 5) 编译码设备要尽可能简单。 1.1 单极性不归零码(NRZ 码) 单极性不归零码中,二进制代码“1”用幅度为E 的正电平表示,“0”用零电平表示,单极性码中含有直流成分,而且不能直接提取同步信号。 0000 E +1111 图1-1 单极性不归零码 1.2 双极性不归零码(BNRZ 码) 二进制代码“1”、“0”分别用幅度相等的正负电平表示,当二进制代码“1”和“0”等概出现时无直流分量。 10111000 E +E -0 图 1-2 双极性不归零码
1.3 单极性归零码(RZ 码) 单极性归零码与单极性不归零码的区别是码元宽度小于码元间隔,每个码元脉冲在下一个码元到来之前回到零电平。单极性码可以直接提取定时信息,仍然含有直流成分。 0000 1111E +0 图 1-3 单极性归零码 1.4 双极性归零码(BRZ 码) 它是双极性码的归零形式,每个码元脉冲在下一个码元到来之前回到零电平。 0000 1111E +0 E - 图 1-4 双极性归零 1.5 曼彻斯特码 曼彻斯特码又称为数字双相码,它用一个周期的正负对称方波表示“0”,而用其反相波形表示“1”。编码规则之一是:“0”码用“01”两位码表示,“1”码用“10”两位码表示。 例如: 消息代码: 1 1 0 0 1 0 1 1 0… 曼彻斯特码:10 10 01 01 10 01 10 10 01… 曼彻斯特码只有极性相反的两个电平,因为曼彻斯特码在每个码元中期的中心点都存在电平跳变,所以含有位定时信息,又因为正、负电平各一半,所以无直流分量。 0000 1111E +E -0 图 1-5 曼彻斯特编码 1.6 CMI 码 CMI 码是传号反转码的简称,与曼彻斯特码类似,也是一种双极性二电平码,其编码规则: “1”码交替的用“11“和”“00”两位码表示; “0”码固定的用“01”两位码表示。 例如: 消息代码:1 0 1 0 0 1 1 0… CMI 码: 11 01 00 01 01 11 00 01… 或: 00 01 11 01 01 00 11 01…
传感器技术及传感器信号处理
传感器技术及其信号处理方法 第一章传感器概述 1.1 传感器技术基础 传感器(sensor)是一种把物理量转换成电信号的器件。可以说,传感器代表了物理世界与电气设备(如计算机)世界接口的一部分。这种接口的另一部分由把电信号转换成物理量的执行器(actuator)表示。 为什么我们这么关心这个接口?近年来,电子行业拥有了巨大的信息处理能力。其中最明显的例子是个人计算机。此外,价格低廉的微处理器的使用对汽车、微波炉、玩具等嵌入式计算产品的设计产生了重大影响。最近几年,使用微处理器进行功能控制的产品越来越多。在汽车行业,为满足污染限制要求必须利用微处理器的这种信息处理能力。而在其他行业,这种能力又带来了降低产品成本、提高产品性能的优势。 所有这些微处理器都需要输人电压以接收指令和数据、因此,随着廉价微处理器的出现,传感器在各种产品中的应用也越来越多。此外,由于传感器输出的是电信号,因而传感器也就能够按电子没备的描述方式来插述。同电子产品数据手册一样,很多传感器数据手册也都遵照某种格式撰写。然而,目前存在很多种格式,而且传感器规格说明的国际标准还没有制订,这样,传感器系统设
计师就会遇到对同一传感器性能参数存在不同的解释,这常常令人混淆。这种混淆并非由于这些术语的含义无法理解,而是在于传感器界不同的人群习惯于使用不同的术语,认识到这一点至关重要。 1.1.1 传感器数据手册 为了解决上述术语使用的差异向题,有必要首先命绍数据手册的功用,数据手册主要是一份营销文件,用来突出某一传感器的优点,強调其潜在的应用,但是有可能忽视该传感器的不足。很多情况下,传感器是设计用来满足特定用户的特定性能要求的,而数锯手册就集中了该用户最感兴趣的性能参数。这种情况下,传感器制造商和客户就有可能越来越习惯于使用某种约定的传感器性能参数定义,而这种定义却未必通用,这样,这种传感器未来的新用户必须认清这种情形以便恰当地理解这些参数。人们常常遇到不同的定义。此外,大多数传感器数据手册都缺少对特定应用有用的信息。 1.1.2 传感器性能特征定义 下面是一些较重要的传感器性能特征。 1.传递函数 传递函数表示物理输入信号与电瑜出信号之间的函数关系。通常,这种关系以输入输出信号关系图来表示,具体的关系构成了对传感器性能特点的完整描述。对需逐
FANUC系统PMC的在线诊断
项目1 FANUC系统PMC的诊断功能 任务目的1)了解FANUCˉOiD/OiMateD系统PMC接口定义与工作原理 2)掌握FANUCˉOiD/OiMateD系统PMC常见故障与诊断方式 3)熟悉LADDER软件在线监测 实践设备 FANUC 0i Mate-D数控系统实验台 实践项目1)PMC数据状态、梯形图在线监控界面操作 2)PMC I/O接口与电气连接 3)PMC LADDER在线联机操作 工作过程知识介绍 1、PMC 所谓PMC(Programmable Machine Controller),就是利用内置在CNC 的PC (Programmable Controller)执行机床的顺序控制(主轴旋转、换刀、机床操作面板的控制等)的可编程机床控制器。所谓顺序控制,就是按照事先确定的顺序或逻辑,对控制的每一个阶段依次进行的控制。用来对机床进行顺序控制的程序叫做顺序程序,通常广泛应用于基于梯图语言(Ladder language)的顺序程序。 2、PMC的基本配置 3、PMC的相关地址
4、数控机床工作状态开关PMC控制 (1) 数控机床状态开关 图1 图2 (2)数控机床状态开关的功能 编辑状态(EDIT):在此状态下,编辑存储到CNC 内存中的加工程序文件。 存储运行状态(MEM):在此状态下,系统运行的加工程序为系统存储器内的程序。 手动数据输入状态(MDI):在此状态下,通过MDI 面板可以编制最多10 行的程序并被执行,程序格式和通常程序一样。 手轮进给状态(HND):在此状态下,刀具可以通过旋转机床操作面板上的手摇脉冲发生器微量移动。 手动连续进给状态(JOG):在此状态下,持续按下操作面板上的进给轴及其方向选择开关,会使刀具沿着轴的所选方向连续移动。 机床返回参考点(REF):在此状态下,可以实现手动返回机床参考点的操作。通过返回机床参考点操作,CNC系统确定机床零点的位置。 DNC状态(RMT):在此状态下,可以通过阅读机(加工纸带程序)或RS-232通信口与计算机进行通信,实现数控机床的在线加工 (3)数控机床方式选择的地址 方式选择信号是由MD1、MD2、MD4的三个编码信号组合而成的,可以实现程序编辑EDIT、存储器运行MEM、手动数据输入MDI、手轮/增量进给HANDLE/INC、手动连续进给JOG、JOG示教、手轮示教,此外,存储器运行于DNC1信号结合起来可选择DNC运行方式。手动连续进给方式与ZRN信号的组合,可选择手动返回参考点方式: