android camera驱动

android camera(一):camera模组CMM介绍
一、摄像头模组(CCM)介绍:
1、camera特写
摄像头模组,全称CameraCompact Module,以下简写为CCM,是影像捕捉至关重要的电子器件。先来张特写,各种样子的都有,不过我前一段时间调试那个有点丑。
2、摄像头工作原理、camera的组成各组件的作用
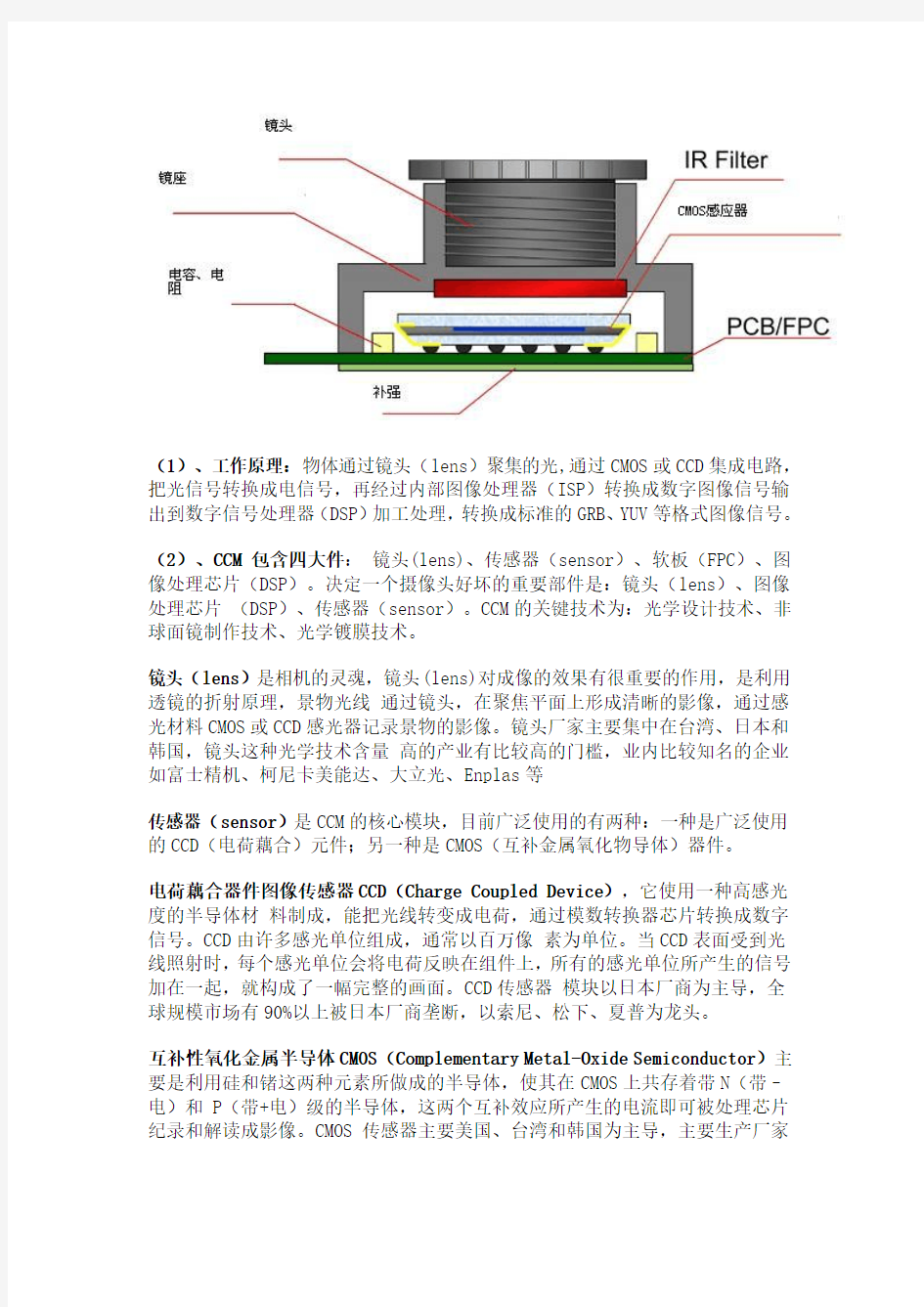
想完全的去理解,还得去深入,如果是代码我们就逐步分析,模组的话我们就把它分解开来,看他到底是怎么工作的。看下它是有那些部分构成的,如下图所示:
(1)、工作原理:物体通过镜头(lens)聚集的光,通过CMOS或CCD集成电路,把光信号转换成电信号,再经过内部图像处理器(ISP)转换成数字图像信号输出到数字信号处理器(DSP)加工处理,转换成标准的GRB、YUV等格式图像信号。
(2)、CCM 包含四大件:镜头(lens)、传感器(sensor)、软板(FPC)、图像处理芯片(DSP)。决定一个摄像头好坏的重要部件是:镜头(lens)、图像处理芯片(DSP)、传感器(sensor)。CCM的关键技术为:光学设计技术、非球面镜制作技术、光学镀膜技术。
镜头(lens)是相机的灵魂,镜头(lens)对成像的效果有很重要的作用,是利用透镜的折射原理,景物光线通过镜头,在聚焦平面上形成清晰的影像,通过感光材料CMOS或CCD感光器记录景物的影像。镜头厂家主要集中在台湾、日本和韩国,镜头这种光学技术含量高的产业有比较高的门槛,业内比较知名的企业如富士精机、柯尼卡美能达、大立光、Enplas等
传感器(sensor)是CCM的核心模块,目前广泛使用的有两种:一种是广泛使用的CCD(电荷藕合)元件;另一种是CMOS(互补金属氧化物导体)器件。
电荷藕合器件图像传感器CCD(Charge Coupled Device),它使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯片转换成数字信号。CCD由许多感光单位组成,通常以百万像素为单位。当CCD表面受到光线照射时,每个感光单位会将电荷反映在组件上,所有的感光单位所产生的信号加在一起,就构成了一幅完整的画面。CCD传感器模块以日本厂商为主导,全球规模市场有90%以上被日本厂商垄断,以索尼、松下、夏普为龙头。
互补性氧化金属半导体CMOS(Complementary Metal-Oxide Semiconductor)主要是利用硅和锗这两种元素所做成的半导体,使其在CMOS上共存着带N(带–电)和 P(带+电)级的半导体,这两个互补效应所产生的电流即可被处理芯片纪录和解读成影像。CMOS 传感器主要美国、台湾和韩国为主导,主要生产厂家
有美国 OmniVision、Agilent、Micron,台湾的锐像、原相、泰视等,韩国的三星、现代。
图像处理芯片(DSP)是CCM的重要组成部分,它的作用是将感光芯片获得的数据及时快速地传递中央处理器并刷新感光芯片,因此DSP芯片的好坏,直接影响画面品质(比如色彩饱和度,清晰度等)。
FPC柔性电路板(柔性PCB): 简称"软板", 又称"柔性线路板",连接芯片和手机。起到电信号传输作用。
3、camera模组的装配方式
(1)、定焦模组装配图
CCM分为定焦模组和自动变焦模组,其中定焦模组主要由镜头、镜座、感光集成电路、软性线路板、补强和钢片装配而成,其装配图如下:
(2)、自动变焦模组装配图
以前我不知道手机上的光学变焦是怎么会事,以为那些都是忽悠人的,看这个图这下明白了,如果你也不知道,看下这个图,原来里面有个音圈马达,这个只有高像素的模组才有,这个我们不用管,知道怎么光学变焦就可以了。
自动变焦模组由镜头、音圈马达、底座支架、感光集成电路、驱动集成电路和连接器组成,其装配图如下:
(3)、3D模组
传说中的3D是怎么会事,多几台摄像机拍摄。手机上也有了??有点强大
看人家手机上用的,感觉看着不太好看,高科技的东西开始就是做得丑了一点,我们了解有这个东西就行了:
4、摄像头的一些技术指标
(1)、图像解析度/分辨率(Resolution)
(2)、图像格式(imageFormat/Colorspace)
RGB24,420是目前最常用的两种图像格式。
RGB24:表示R、G、B三种颜色各8bit,最多可表现256级浓淡,从而可以再现256*256*256种颜色。
I420:YUV格式之一。其它格式有:RGB565,RGB444,YUV4:2:2等。
(3)、自动白平衡调整(AWB)
定义:要求在不同色温环境下,照白色的物体,屏幕中的图像应也是白色的。色温表示光谱成份,光的颜色。色温低表示长波光成分多。当色温改变时,光源中三基色(红、绿、蓝)的比例会发生变化,需要调节三基色的比例来达到彩色的平衡,这就是白平衡调节的实际。
(4)、图像压缩方式
JPEG:(joint photo graphicexpert group)静态图像压缩方式。一种有损图像的压缩方式。压缩比越大,图像质量也就越差。当图像精度要求不高存储空间有限时,可以选择这种格式。目前大部分数码相机都使用JPEG格式。
(5)、彩色深度(色彩位数)
反映对色彩的识别能力和成像的色彩表现能力,实际就是A/D转换器的量化精度,是指将信号分成多少个等级。常用色彩位数(bit)表示。彩色深度越高,获得的影像色彩就越艳丽动人。现在市场上的摄像头均已达到24位,有的甚至是32位
(6)、图像噪音
指的是图像中的杂点干挠。表现为图像中有固定的彩色杂点。
(7)、视角
与人的眼睛成像是相成原理,简单说就是成像范围。
(8)、输出/输入接口
串行接口(RS232/422):传输速率慢,为115kbit/s
并行接口(PP):速率可以达到1Mbit/s
红外接口(IrDA):速率也是115kbit/s,一般笔记本电脑有此接口
通用串行总线USB:即插即用的接口标准,支持热插拔。USB1.1速率可达12Mbit/s,USB2.0可达480Mbit/s
IEEE1394(火线)接口(亦称ilink):其传输速率可达100M~400Mbit/s
今天有点晚了,后继续分析camera sensor接口、s5pv310 CAMIF接口、V4L2、FIMC、和我们最终的sensor驱动。
二/摄像头工作原理、s5PV310 摄像头接口(CAMIF)
一、摄像头工作原理
上一篇我们讲了摄像头模组的组成,工作原理,做为一种了解。下面我们析摄像头从寄存器角度是怎么工作的。如何阅读摄像头规格书(针对驱动调节时用到关键参数,以GT2005为例)。
规格书,也就是一个器件所有的说明,精确到器件每一个细节,软件关心的寄存器、硬件关心的电气特性、封装等等。单单驱动方面,我们只看对我们有用的方面就可以了,没必要全部看完。主要这样资料全都是鸟语(En),全部看完一方面时间上会用的比较多,找到关键的地方就行了。
1、camera的总体示意图如下:控制部分为摄像头上电、IIC控制接口,数据输出为摄像头拍摄的图传到主控芯片,所有要有data、行场同步和时钟号。
GT2005/GT2015是CMOS接口的图像传感器芯片,可以感知外部的视觉信号并将其转换为数字信号并输出。
我们需要通过MCLK给摄像头提供时钟,RESET是复位线,PWDN在摄像头工作时应该始终为低。PCLK是像素时钟,HREF是行参考信号,VSYNC是场同步信号。一旦给摄像头提供了时钟,并且复位摄像头,摄像头就开始工作了,通过HREF,VSYNC和PCLK同步传输数字图像信号。数据是通过D0~D7这八根数据线并行送出的。
(1)、Pixel Array
GT2005阵列大小为 1268 列、1248 行,有效像素为 1616 列, 1216 行。也就是说摄像头为1600X1200的时候,像素点要多于这个,去除边缘一部分,保证图像质量吧。
(2)、IIC 这个不用说了,摄像头寄存器初始化的数据都从这里传输的,所有的IIC器件都一样的工作,来张图吧,后面做详细分析;
下面这一部分在调试驱动的过程中比较重要了:
(3)、MCLK
电子元件工作都得要个时钟吧,摄像头要工作,这个就是我们所要的时钟,在主控制芯片提供,这个时钟一定要有,要不然摄像头不会工作的。
(4)、上下电时序,这个要接规格书上来,注间PWDN、RESETB这两个脚,不同的摄像头不太一样,这个图是上电时序,上电时参考一下,知道在那里看就行;
(5)PCLK \D1~D7
摄像头得到的数据要传出来吧,要有数据,当然数据出来要有时钟和同步信号了,看下它的时序,和LCD显示的时序一样,道理是一样的:
(6)、主要的寄存器:分辨率、YUV顺序、X轴、Y轴镜相、翻转
以上工作完成后,也许还有一些问题,分辨率太小; YUV顺序不对图像不对; XY 图像方向。这些工作完成后,如果还有什么细节的问题,如果你想花时间,看规格书里面的寄存器可以解决的,如果不想看,找模组厂的FAE,他们专业的,很快会帮你搞定。
(7)、摄像头的硬件接口
二、S5pv310上Camera主控芯片上的硬件接口
1、CAMIF Camera Interface
先看一下摄像头接口框图:(这个看着有点抽像,我们放这里,先了解一下,其实驱动中一般不会涉及到这里,不过我们这里分析了,就把这个带出来了)
(1)、摄像头接口的主要属性:
a、支持多种输入接口:(就是上面我们看到的四模式)
DMA (AXI 64-bitinterface) 模式;
MIPI (CSI) 模式;
ITU-R BT 601/ 656/ 709模式;
Direct FIFO (PlayBack)模式;
b、支持多种输出模式:
DMA (AXI 64-bitinterface) 模式;
Direct FIFO 模式;
c、支持数码变焦Digital Zoom In (DZI) capability;
d、支持多摄像头输入;
e、支持视频同步信号极性可编程控制;
f、支持最大输入分辨率为8192X8192;
g、支持图像翻转(X轴、Y轴镜相,90、180、270翻转);
h、支持多种图片格式;
i、支持捕获帧控制;
j、支持的图像特效。
2、FIMC Fully InteractiveMobile Camera
摄像头的采集的数据要CPU无法直接处理,主控芯片里面集成了Camera控制器,叫FIMC(FullyInteractive Mobile Camera)。摄像头需要先把图像数据传给控制器,经过控制器处理(裁剪拉升后直接预览或者编码)之后交给CPU 处理。实际上摄像头工作需要的时钟(MCLK)也是FIMC给它提供的。
在s5pv310上的摄像头接口是一个FIMC(完全交互式移动相机接口),支持ITUR BT-601-605标准、AMX接口、MIPI接口
MIPI 、ITU、AMX
(1)、ITU国际电信联盟无线电通信部门ITU-RRadiocommunication Sector of ITU 简称ITU-R ITU-R BT.601 16位数据传输;Y、U、V信号同时传输,是并行
数据,行场同步单独输出。
ITU-R BT.6568/10位数据传输;不需要同步信号;串行数据传输;传输速率是601的2倍;先传Y,后传UV。行场同步信号嵌入在数据流中。
(2)、MIPI(移动行业处理器接口)是MobileIndustry Processor Interface 的缩写 MIPI 规范:Camera工作组:MIPI Camera Serial Interface
1.0specification .Camera Serial Interface 2 v1.0 (CSI-2)
(3)、AMX(Advanced eXtensible Interface)是一种总线协议,该协议是ARM 公司提出的AMBA(Advanced Microcontroller BusArchitecture)3.0协议中最重要的部分,是一种面向高性能、高带宽、低延迟的片内总线。
3、接口信息
FIMC信号定义如下所示(YCbCr模式)
通过CAM_MCLK给摄像头提供时钟,RST是复位线,PWDN在摄像头工作时应该始终为低。HREF是行参考信号,PCLK是像素时钟,VSYNC是场同步信号。一旦给摄像头提供了时钟,并且复位摄像头,摄像头就开始工作了,通过HREF,PCLK 和VSYNC同步传输数字图像信号。数据是通过DATA0~DATA7这八根数据线并行送出的。
4、不同接口模式的工作时序
ITU-R BT 656输入时序图,这种方式下同步信号已经内嵌到视频数据中了,因此
不需要额外的行和帧同步信号。
要同步信号。
(ITU-R BT 601: 16位数据传输;21芯;Y、U、V信号同时传输。
ITU-R BT 656: 9芯,不需要同步信号;8位数据传输;串行视频传输;传输速率是601的2倍;先传Y,后传UV。)
同步信号的时延参数
? t1:表示VSYNC前、后插入周期
? t2:表示HREF前插入周期
? t3:表示 HREF宽度
? t4:表示HREF后插入周期
5、camera的时钟域,三个时钟:系统时钟、PCLK、MCLK
每个摄像头接口包括三个时钟域,每一个时钟域是系统总线时钟,第二个是摄像头像素时钟PCLK,第三个时钟域为内部时钟MCLK。系统总线时钟必需高于PCLK, CAM_MCLK 必需固定频率分频,如PLL时钟。如果有外部时钟晶振,CAM_MCLK 空掉。不需要同步MMCLK,PCLK应该与schmitt-triggered电平移位器连接。
主控芯片上的接口:
camera 接口
android camera(三):camera V4L2 FIMC
前面两篇说的有点多了,不过多了解点东西也挺好的,遇到问题时可以有更多的思路,真正驱动是从这一块开始。一般BSP的camera都是完好的,我们只用关心驱动这些就可以了。
1. V4L2
1)简介
在Linux中,摄像头方面的标准化程度比较高,这个标准就是V4L2驱动程序,这也是业界比较公认的方式。
V4L全称是Video for Linux,是Linux内核中标准的关于视频驱动程序,目前使用比较多的版本是Video for Linux 2,简称V4L2。它为Linux下的视频驱动提供了统一的接口,使得应用程序可以使用统一的API操作不同的视频设备。从内核空间到用户空间,主要的数据流和控制类均由V4L2驱动程序的框架来定义。
V4L2驱动程序一般只提供Video数据的获得,而如何实现视频预览,如何向上层发送数据,如何把纯视频流和取景器、视频录制等实际业务组织起来,都是camera的硬件抽象层需要负责的工作。
V4L2驱动核心实现为如下文件:drivers/media/video/v4l2-dev.c。
V4l2-dev.h中定义的video_device是V4L2驱动程序的核心数据结构,它为具体的摄像头sensor驱动提供了接口调用。
V4l2的采集过程(应用程序):
1) 打开设备,获得文件描述符;
2) 设置图片格式;
3) 分配缓冲区;
4) 启动采集过程,读取数据;
5) 停止采集,关闭设备。
2)数据结构
V4L2的主要数据结构是video_device,定义在v4l2_dev.h中:[cpp]view plaincopy
1.struct video_device
2.{
3. /* device ops */
4. const struct v4l2_file_operations *fops; /*接口函数指针
*/
5.
6. /* sysfs */
7. struct device dev; /* v4l 设备结构 */
8. struct cdev *cdev; /* 字符设备结构*/
9.
10. /* Set either parent or v4l2_dev if your driver uses v4l2_d
evice */
11. struct device *parent; /* 设备父指针 */
12. struct v4l2_device *v4l2_dev; /* v4l2设备指针*/
13.
14. /* device info */
15. char name[32]; /*设备名称*/
16. int vfl_type;
17. /* 'minor' is set to -1 if the registration failed */
18. int minor; /*次设备号*/
19. u16 num;
20. /* use bitops to set/clear/test flags */
21. unsigned long flags;
22. /* attribute to differentiate multiple indices on one physi
cal device */
23. int index;
24.
25. /* V4L2 file handles */
26. spinlock_t fh_lock; /* Lock for all v4l2_fhs */
27. struct list_head fh_list; /* List of struct v4l2_fh */
28.
29. int debug; /* debug 级别*/
30.
31. /* Video 标准变量 */
32. v4l2_std_id tvnorms; /* Supported tv norms */
33. v4l2_std_id current_norm; /* Current tvnorm */
34.
35. /* 回调函数 */
36. void (*release)(struct video_device *vdev);
37.
38. /* ioctl 回调函数 */
39. const struct v4l2_ioctl_ops *ioctl_ops;
40.};
主要接口函数有:
intvideo_register_device(struct video_device *vdev, int type, int nr);
static intv4l2_ioctl(struct inode *inode, struct file
*filp, unsigned int cmd, unsigned long arg);
2. FIMC
1)简介
FIMC这个模块不仅仅是一个摄像头的控制接口,它还承担着V4L2的output功能和overlay的功能。
FIMC的驱动在内核中的位置:drivers/media/video/samsung/fimc
它包含下边的文件:
fimc_regs.c
fimc_capture.c
fimc_dev.c
fimc_output.c
fimc_overlay.c
fimc_v4l2.c
它们的组织关系如下:
可以看到,FIMC的驱动实现了v4l2所有的接口,可以分为v4l2-input设备接口,v4l2-output设备接口以及v4l2-overlay设备接口。这里我们主要关注
v4l2-input设备接口,因为摄像头属于视频输入设备。
fimc_v4l2.c里面注册了很多的回调函数,都是用于实现v4l2的标准接口的,但是这些回调函数基本上都不是在fimc_v4l2.c里面实现的,而是有相应的.c 分别去实现。比如:
v4l2-input设备的操作实现:fimc_capture.c
v4l2-output设备的操作实现: fimc_output.c
v4l2-overlay设备的操作实现: fimc_overlay.c
这些代码其实都是和具体硬件操作无关的,这个驱动把所有操作硬件寄存器的代码都写到一个文件里面了,就是fimc40_regs.c。这样把硬件相关的代码和硬件无关的代码分开来实现是非常好的方式,可以最大限度的实现代码复用。
2)数据结构
FIMC的主要数据结构fimc_control,定义在fimc.h中:
[cpp]view plaincopy
1.struct fimc_control {
2. int id; /* 控制器 id */
3. char name[16];
4. atomic_t in_use;
5. void __iomem *regs; /* 寄存器 i/o */
6. struct clk *clk; /* interface clock */
7. struct regulator *regulator; /* pd regulator */
8. struct fimc_meminfo mem; /* for reserved mem */
9.
10. /* kernel helpers */
11. struct mutex lock; /* controller lock */
12. struct mutex alloc_lock;
13. struct mutex v4l2_lock;
14. wait_queue_head_t wq;
15. struct device *dev;
16. int irq;
17.
18. /* v4l2 related */
19. struct video_device *vd;
20. struct v4l2_device v4l2_dev;
21.
22. /* fimc specific */
23. struct fimc_limit *limit; /* H/W limitation */
虚拟声卡驱动程序VirtualAudioCable使用方法
一:安装软件 点击 选择是(Y) 选择I accept 选择Install 安装成功,点击“确定”按钮即完成安装。 二、软件的设置 点击桌面开始按钮所有程序---Virtual Audio Cable —Control panel 进入软件初始化 设置。 在Cables 中选择1(即首次设置一个虚拟通道),点击旁边的Set 按钮生成通道Cable1. 在参数设置区将Line 、Mic (可选可不选)、S/PDIF (可选可不选)三个选项后面的方框打钩,选中之后点击参数设置区内的设置按钮Set ,即完成了,对虚拟声卡通道1 的设置。 鼠标右键点击桌面右下角的喇叭------ 调整音频属性---- < 或者点击开始—控制面板--- 声音、 语音和音频设备--- 声音和音频设备>弹出: 选择语音 此时语音部分的设置为原系统默认的设备,保持不变。 选择音频: 改变声音播放、录音的选项内容:
如上图将声音播放、录音的默认设备全部改为Virtual Cable 1 。点击应用--- 确定即可。 三、打开录音机录音--- 录制电脑里播放出来的音频(不包含麦克风 里的声音) - 即“内录” 开始--- 所有程序—附件--- 娱乐--- 录音机 点击确定即可开始录音(注:此时可在电脑中打开相应的音频文件,开始录音) 此时音频波段显示有声音输入,但是电脑的耳机听不到正在播放的音频文件(属正常现象)。若想同时听到音频文件的内容点击桌面开始按钮所有程序---Virtual Audio Cable —Audio Repeater 。 修改为 点击Start 即可听到正在录制的音频文件。此时的录音即是通过虚拟声卡通道录制电脑里的声音的。 四、同时录电脑里播放的声音和麦克风收集的外部声音----- 即混录 <通过这种方法解决现有笔记本无“立体声混音”或“波形音”选项的问题> 在《三打开录音机录音--- 录制电脑里播放出来的音频(不包含麦克风里的声音)------------ 即“内录”》的同时,在打开一个irtual Audio Cable —Audio Repeater 窗口将其设置为: 即将外部麦克风收集的声音转移到虚拟声卡通道Cable1 中,同电脑里播放的声音一起被录音软件收录为音频文件。
编译hello设备驱动程序详细过程
编译hello world设备驱动程序详细过程 1、安装与你的开发板相同的内核版本的虚拟机,我的板子内核是2.6.8.1,虚拟机是2.6.9, 一般是虚拟机的内核只能比板子内核新,不能旧 #uanme –a [1](在任何目录下,输入此命令,查看虚拟机的内核版本,我的内核版本是2.6.9) 2、在虚拟机上设置共享目录,我的共享目录在linux下的/mnt/hgfs/share [2]share是自己命名的,我的物理机上,即Windows下的目录是G:/share, 3、在Windows下,把开发板的的交叉开发工具链[3],内核源码包[4],复制到物理机的共享目录下[5] 即Windows下的目录是G:/share, 4、#cp /mnt/hgfs/share/cross-3.3.2.tar.bz2 /usr/local/arm [6] 在Linux下,把交叉工具链,复制到/usr/local/arm目录下 5、#cd /usr/local/arm 6、#tar jxvf cross-3.3.2.tar.bz2 [7] 并在当前目录/usr/local/arm下解压它cross-2.95.3.tar.bz2和gec2410-linux-2.6.8.tar.bz2也是用同样的命令去解压 7、#export PATH=/usr/local/arm/3.3.2/bin:$PATH [8] 安装交叉工具链,在需要使用交叉编译时,只要在终端输入如下命令 #export PATH=/usr/local/arm/版本/bin:$PATH 即可,在需要更改不同版本的工具链时,重新启动一个终端,然后再一次输入上面的命令即可,使用哪个版本的交叉工具链,视你要编译的内核版本决定,编译2.4版本的内核,则用2.95.3版本的交叉工具链,而2.6版本内核的,则要用3.3.2版本的交叉工具链。 8、#cp gec2410-linux-2.6.8.tar.bz2 /root [9]把内核拷贝到/root目录下, 9、#cd /root 10、#tar gec2410-linux-2.6.8.tar.bz2 [10] 在/root解压开发板的内核源码压缩包gec2410-linux-2.6.8.tar.bz2,得到gec2410-linux-2.6.8.1文件夹 11、#cd /root/ gec2410-linux-2.6.8.1 12、#cp gec2410.cfg .config [11] gec2410.cfg文件是广嵌开发板提供的默认内核配置文件,在这里首先把内核配置成默认配置,然后在此基础上用make menuconfig进一步配置,但在这里,不进行进一步的配置,对于内核配置,还需要看更多的知识,在这里先存疑。 13、#make [12]在内核源代码的根目录gec2410-linux-2.6.8.1下用make命令编译内核,注意,先安装交叉工具链,再编译内核,因为这里编译的hello.ko驱动模块最终是下载到开发板上运行的,而不是在虚拟机的Linux系统运行的,如果是为了在虚拟机的Linux系统运行的,则不用安装交叉编译工具链arm-linux-gcc,而直接用gcc,用命令#arm-linux-gcc –v 可以查看当前已经安装的交叉编译工具链的版本。这里编译内核不是为了得到内核的映象文件zImage(虽然会得到内核的映象文件zImage),而是为了得到编译hello.o模块需要相关联,相依赖(depends on)的模块。 14、#cd /root 12、#mkdir hello [13]在/root目录下建立hello文件夹, 13、#cd hel 14 、#vi hello.c [12]编辑hello.c文件,内容是《Linux设备驱动程序》第三版22页的hello world程序。 15、#vi Makefile [13]在hello文件夹下编辑Makefile文件, 16、obj-m := module.o [14] 这是Makefile的内容,为obj-m := module.omodule.o视你编辑的.c文件而定,这里则要写成hello.o,写完后,保存退出。 17、cd /root/hello
Android驱动开发实例(控制LED灯)(精)
Android驱动例子(LED灯控制) 本例子,讲述在Android2.1上完全自已开发一个驱动去控制硬件口并写应用测试该驱动,通过这样一个例子,解析android下的驱动开发流程的应用调用流程,可以说是很好的入门引导 要达到的效果:通过Android的应用,调用驱动程序,在开发板上控制4个LED的亮灭。 一、硬件原理 如上图,通过4个IO口控制这LED,低电平LED亮, 这4个IO口分别是GPM1, GPM2, GPM3, GPM4, 二、驱动程序 1、在kernel文件夹下的driver目录,新键驱动文件夹 # cd kernel_Android_2.6.28.6/drivers 进到开发板的kernel目录,建驱动文件夹 #mkdir ledtest
2、在/driver/ledtest目录下,新建leddriver.c ,leddriver.h , Kconfig, Makefile 等4个文件leddriver.c leddriver.c 1. #include 2. #include 3. #include 4. #include/* For __init/__exit/... */ 5. #include 6. #include 7. #include 8. #include 9. #include 10. #include 11. #include 12. #include 13. #include 14. #include 15. #include 16. #include 17. #include//for register_chrdev( 18. #include 19. #include 20. #include"leddriver.h" 21. #include/* For MODULE_ALIAS_MISCDEV 22. (WATCHDOG_MINOR */ 23. #include/* For the watchdog specific items */ 24. #include/* For file operations */ 25. #define Viberator_MAJOR 97 //?÷éè±?o? 26. #define SCULL_NR_DEVS 4 27. #define SCULL_QUANTUM 4000 28. #define SCULL_QSET 1000 29. //---do as the GIO driver
android系统开发--HAL层开发基础
android系统开发--HAL层开发基础 Android HAL层,即硬件抽象层,是Google响应厂家“希望不公开源码”的要求推出的新概念 1,源代码和目标位置 源代码:/hardware/libhardware目录,该目录的目录结构如下: /hardware/libhardware/hardware.c编译成libhardware.so,目标位置为/system/lib目录 /hardware/libhardware/include/hardware目录下包含如下头文件: hardware.h 通用硬件模块头文件 copybit.h copybit模块头文件 gralloc.h gralloc模块头文件 lights.h 背光模块头文件 overlay.h overlay模块头文件 qemud.h qemud模块头文件 sensors.h 传感器模块头文件 /hardware/libhardware/modules目录下定义了很多硬件模块 这些硬件模块都编译成xxx.xxx.so,目标位置为/system/lib/hw目录 2,HAL层的实现方式 JNI->通用硬件模块->硬件模块->内核驱动接口 具体一点:JNI->libhardware.so->xxx.xxx.so->kernel 具体来说:android frameworks中JNI调用/hardware/libhardware/hardware.c中定义的hw_get_module函数来获取硬件模块, 然后调用硬件模块中的方法,硬件模块中的方法直接调用内核接口完成相关功能 3,通用硬件模块(libhardware.so) (1)头文件为:/hardware/libhardware/include/hardware/hardware.h 头文件中主要定义了通用硬件模块结构体hw_module_t,声明了JNI调用的接口函数 hw_get_module hw_module_t定义如下: typedef struct hw_module_t { /** tag must be initialized to HARDWARE_MODULE_TAG */ uint32_t tag; /** major version number for the module */ uint16_t version_major; /** minor version number of the module */ uint16_t version_minor; /** Identifier of module */ const char *id; /** Name of this module */ const char *name;
虚拟设备驱动程序的设计与实现
虚拟设备驱动程序的设计与实现 由于Windows对系统底层操作采取了屏蔽的策略,因而对用户而言,系统变得 更为安全,但这却给众多的硬件或者系统软件开发人员带来了不小的困难,因为只要应用中涉及到底层的操作,开发人员就不得不深入到Windows的内核去编写属 于系统级的虚拟设备驱动程序。Win 98与Win 95设备驱动程序的机理不尽相同,Win 98不仅支持与Windows NT 5.0兼容的WDM(Win32 Driver Mode)模式驱动程序 ,而且还支持与Win 95兼容的虚拟设备驱动程序VxD(Virtual Device Driver)。下面介绍了基于Windows 9x平台的虚拟环境、虚拟设备驱动程序VxD的基本原理和 设计方法,并结合开发工具VToolsD给出了一个为可视电话音频卡配套的虚拟设备 驱动程序VxD的设计实例。 1.Windows 9x的虚拟环境 Windows 9x作为一个完整的32位多任务操作系统,它不像Window 3.x那样依 赖于MS-DOS,但为了保证软件的兼容性,Windows 9x除了支持Win16应用程序和 Win32应用程序之外,还得支持MS-DOS应用程序的运行。Windows 9x是通过虚拟机 VM(Virtual Machine)环境来确保其兼容和多任务特性的。 所谓Windows虚拟机(通常简称为Windows VM)就是指执行应用程序的虚拟环 境,它包括MS-DOS VM和System VM两种虚拟机环境。在每一个MS-DOS VM中都只运 行一个MS-DOS进程,而System VM能为所有的Windows应用程序和动态链接库DLL(Dynamic Link Libraries)提供运行环境。每个虚拟机都有独立的地址空间、寄存器状态、堆栈、局部描述符表、中断表状态和执行优先权。虽然Win16、Win32应用程序都运行在System VM环境下,但Win16应用程序共享同一地址空间, 而Win32应用程序却有自己独立的地址空间。 在编写应用程序时,编程人员经常忽略虚拟环境和实环境之间的差异,一般认为虚拟环境也就是实环境。但是,在编写虚拟设备驱动程序VxD时却不能这样做 ,因为VxD的工作是向应用程序代码提供一个与硬件接口的环境,为每一个客户虚 拟机管理虚设备的状态,透明地仲裁多个应用程序,同时对底层硬件进行访问。这就是所谓虚拟化的概念。 VxD在虚拟机管理器VMM(Virtual Machine Manager)的监控下运行,而VMM 实 际上是一个特殊的VxD。VMM执行与系统资源有关的工作,提供虚拟机环境(能产
嵌入式linux android驱动工程师 面试题总汇
嵌入式linux android驱动工程师面试题总汇 1. 嵌入式系统中断服务子程序(ISR) 收藏中断是嵌入式系统中重要的组成 部分,这导致了很多编译开发商提供一种扩展—让标准C支持中断。具代表事实是,产生了一个新的关键字__interrupt。下面的代码就使用了__interrupt 关键字去定义了一个中断服务子程序(ISR),请评论一下这段代码的。 __interrupt double compute_area (double radius) { double area = PI * radius * radius; printf(" Area = %f", area); return area; } 1). ISR 不能返回一个值。2). ISR 不能传递参数。3). 在许多的处理器/编译器中,浮点一般都是不可重入的。有些处理器/编译器需要让额处的寄存器入栈,有些处理器/编译器就是不允许在ISR中做浮点运算。此外,ISR应该是短而有效率的,在ISR中做浮点运算是不明智的。4). 与第三点一脉相承,printf()经常有重入和性能上的问题。 2.C语言中对位的操作,比如对a的第三位清0,第四位置1.本来应该会的,一犯晕写反了,以后注意! #define BIT3 (1<<3) #define BIT4 (1<<4) a &= ~BIT3; a |= BIT4; 3.考到volatile含义并举例:理解出错,举了很具体的例子,连程序都搬上去了,有些理解不深的没举出来…… volatile表示这个变量会被意想不到的改变,每次用他的时候都会小心的重新读取一遍,不适用寄存器保存的副本。 volatile表示直接存取原始地址 例: 并行设备的硬件寄存器(状态寄存器) 在多线程运行的时候共享变量也要时时更新 一个中断服务子程序中访问到的的非自动变量(不太清楚,正在查找资料ing……) 4.要求设置一绝对地址为0x67a9 的整型变量的值为0xaa66 当时我的写法:#define AA *(volatile unsigned long *)0xaa66 AA = 0x67a9; 答案:
《设备驱动程序开发技术》大作业
《设备驱动程序开发技术》 大作业 WDM驱动程序的开发流程和要点班级:计算机科学与技术1004
摘要 DWDM(Windows Driver Model)是Microsoft公司推出的一种符合Windows2k/XP下的内核模式驱动程序的分层体系结构的驱动程序模式。它源于 Windows NT的分层32位设备驱动程序模型,它支持更多的特性,如即插即用( PnP ,Plug and Play )、电源管理( PM ,Power Management )、Windows管理诊断( WMI ,Windows Management Instrumentation )和 NT 事件。它为Windows操作系统的设备驱动程序提供了统一的框架,在Windows平台上,WDM将成为主流的驱动模式。WDM是Windows98和Windows2000使用的新的驱动程序设计规范。使用WDM使得硬件驱动程序更加稳定,让操作系统对硬件更加有效地控制硬件。除了定义一个驱动程序与操作系统连接的标准接口以外,WDM也指明了驱动程序应该采用的更加模块化的设计。 关键词: WDM、驱动程序、操作系统
1 概述 WDM(Windows Driver Model)是Microsoft公司推出的一种符合Windows2k/XP下的内核模式驱动程序的分层体系结构的驱动程序模式。相对于以前的KDM、VXD来说,它的性能更高、系统之间移植更加方便。随着Microsoft的操作系统的不断升级,WDM已逐步取代了KDM、VXD,成为了Microsoft系统下驱动程序开发的主流。 WDM是通过一个128位的全局唯一标识符(GUID)实现驱动程序的识别。应用程序与WDM 驱动程序通信时,应用程序将每个用户请求形成I/O请求包(IRP)发送到驱动程序。驱动程序识别出IRP请求后指挥硬件执行相应操作。 2 WDM驱动模型 WDM模型为存在于Windows 98和Windows 2000操作系统中的设备驱动程序提供了一个参考框架。尽管对于最终用户来说这两个操作系统非常相似,但它们的内部工作却有很大不同。 Windows 2000概述 图1是以我的视点所看到的Windows 2000操作系统,该图着重了驱动程序开发者所关心的特征。软件要么执行在用户模式中,要么执行在内核模式中。当用户模式程序需要读取设备数据时,它就调用Win32 API函数,如ReadFile。Win32子系统模块(如KERNEL32.DLL)通过调用平台相关的系统服务接口实现该API,而平台相关的系统服务将调用内核模式支持例程。在ReadFile调用中,调用首先到达系统DLL(NTDLL.DLL)中的一个入口点,NtReadFile 函数。然后这个用户模式的NtReadFile函数接着调用系统服务接口,最后由系统服务接口调用内核模式中的服务例程,该例程同样名为NtReadFile。
虚拟块设备驱动程序设计与分析
如果只是为了应付考试,这个文档就太啰嗦了,不用看,不过还是可以帮助记忆,考试只会考其中加粗字体的几个函数中的一个,至于是哪个我不能断定,因此要记的还是比较多的,要是能理解就更好了,结合课本和下面的解释应该能大体上弄明白这个虚拟块设备驱动的 实现过程,毕竟设备驱动是内核的一部分,光看下面的解释也是还是很头晕的,不过坚持看下去还是有收获的,我也差不多花了半天时间,不过,要是打算……的话就可以直接跳过了。 #define MAJOR_NR 70 //我们创造的虚拟块设备的主设备号 #define DEVICE_NAME “bdemo”//我们创造的虚拟块设备的名字,当设备加载成功后可用lsmod命令查看到该设备模块名 #define blkdemo_devs 2 //虚拟块设备的个数 #define blkdemo_rahead 2 //读取块设备时预读的扇区个数 #define blkdemo_size 4 //每个虚拟块设备的大小,单位为KB #define blkdemo_blksize 1024 //设备每个数据块的大小,即block,单位为字节 #define blkdemo_hardsect 512 //设备每个扇区的大小,单位为字节 struct blkdemo_device { // 这里定义了我们将要创造的虚拟块设备的数据结构 int size; // 用来记录真实块设备的容量,即下面data指针所指向数据存储区的大小 int use_cnt; // 用来记录正在使用该块设备的程序的个数 int hardsect; // 用来保存该块设备每个扇区的大小,单位为字节,即设备的使用计数 u8 *data; // 该指针所指向的内存区域就是该块设备真正用来存储数据的区域,在该设备还未被加载函数初始化时,该指针为// 空,即系统还没有为该设备分配内存区域。 }; static int blkdemo_sizes[blkdemo_devs]; //用来保存我们创建的所有虚拟块设备的大小,单位为KB static int blkdemo_blksizes[blkdemo_devs]; //用来保存我们创建的所有虚拟块设备中每个数据块的大小,单位为字节static int blkdemo_hardsects[blkdemo_devs];//用来保存我们创建的所有虚拟块设备中每个扇区的大小,单位为字节 //上面的这三个数组将会在我们加载这些设备时被注册到内核的数据结构中(即让内核中与之相关的一些指针指向它们,让内核能够读取我们所创建的设备的一些重要信息 //对于一个新的设备,内核肯定不知道他为何物,要想让内核识别我们自己创造的设备,则必须将该设备的一些信息、使用这个设备的方//法等告诉内核,由于内核早已编译成型,至于如何去告诉内核就早已模式化。内核中有几个指针数组(书本page81)专门用来完成上面的部分任务: // blk_size[]; // blksize_size[]; // hardsect_size[]; // read_ahead[]; //这几个数组都为每一个主设备号留有一个位置,对于2.4的内核,主设备号和次设备号均用8位二进制来表示(即短整型的高八位和//低八位),因此这几个数组都包含有256个元素,每个元素都是与主设备号对应的一个指针,如果主设备号所对应的设备不存在,则该//指针置为空(NULL),其实其中很多指针都为空,因为一般电脑上都没有那么多不同类型的块设备,当然,对于我们所创造的这个块设//备而言,它与系统中所存在的其他块设备的类型都不同,要为其确定一个主设备号,这个没什么硬性的规定,只要找一个没被使用的主//设备号就可以了,这个程序中使用的是70(前面的MOJOR_NR宏)。上面我们定义了保存有虚拟块设备信息的数组,现在只要将他们的//首地址赋给这几个数组中下标70(主设备号)所对应的指针元素即可。这一过程是在后面的加载函数中完成的。 static int blksize = blkdemo_blksize; struct blkdemo_device blkdemo_dev[blkdemo_devs];//这里才真正创建了我们虚拟块设备对应的结构体变量(一个全局数组),//每个元素为对应一个虚拟块设备 虚拟块设备的打开函数(open()): int blkdemo_open(struct inode *inode, strcut file *filp) { //设备文件对应的节点(inode)结构中包含有对应的设备号 int num; num = DEVICE_NR(inode->i_rdev);//用DEVICE_NR宏可求出该节点所对应设备的次设备号,所以num即为次设备号if (!blkdemo_dev[num].use_cnt) { //如果该设备的使用计数为0,则说该设备没有被任何程序使用,当虚拟块设备没有被//任何程序使用时,内核先前为该设备所分配的存储区很可能已经被释放掉了,甚至对于可移动设备而言,有可能该设备都被拔掉了(当//然,我们的虚拟块设备是不可能的),因此,在打开该设备时要进行严格的检查,不然会导致设备打开出错而造成系统崩溃。 check_disk_change(inode->i_rdev);//首先检查该块设备是否发生了变化,比如已经被移除了(该设备不可能,所以//此处没有用if来判断,只是形式的调用了一下该函数。 if (!blkdemo_dev[num].data)//然后判断该设备的数据存储区域是否已经被释放掉了 return –ENOMEM; //如果是,则返回,告知系统该设备无法打开,-ENOMEM是一个内核中定义的宏,它代表的意思是//“error,no memory”。 }//如果上述情况均未发生,一切正常,则打开设备,对于这个虚拟的块设备,其实没有什么好打开的,不过还是意思一下:blkdemo_dev[num].use_cnt++; //将设备的使用计数加1,表示又多了个程序使用该设备。 MOD_INC_USE_COUNT; //并且将内核所管理的模块使用计数也加1,好让内核也知道多了一个程序使用该虚拟设备模块。模块使//用计数是内核管理模块时要用的,只有当一个设备的模块使用计数为0时才能卸载该模块,这个值也可以通过lsmod命令查看到return(0);//返回0,表示设备已成功打开 } 虚拟块设备的释放函数(release()): int blkdemo_release(struct inode *inode, struct file *filp) {//释放并不代表将此设备从内核中移除了,他是对调用它的程序而言的,只表示这个程序不再使用该设备了int num;
Android移动应用开发习题答案
Android移动应用开发习题答案 单元1 Android开发环境搭建与模拟器创建 1.填空题 (1) 2008 (2) Linux、操作系统 (3) 应用程序层、应用程序框架层、核心类库、Linux内核 (4) Java C++/C (5) 应用框架 (6) 应用程序 (7) 模拟器、Android模拟器 (8) IntelliJ IDEA Android 2.选择题 (1)创建程序的过程中,填写Application Name表示()。 正确答案:A (2)Android操作系统的手机可以有以下几个方法进行软件安装()。(多选题)ABCD (3)Android操作系统主要的特点是:()。(多选题) 正确答案:ABC (4)以下对Android操作系统描述正确的是:()。(多选题) 正确答案:ABCD (5)以下哪些是Android Stuido的优势()。(多选题) 正确答案:ABCD (6)以下哪些是Genymotion模拟器的优势()。(多选题) 正确答案:ABCD 3.简答题 (1)Android的四层架构分别包括哪几层?分别起到什么作用? 参考答案: Linux内核层(Linux Kernel):基于Linux内核,内核为上层系统提供了系统服务。 核心类库层(Libraries):系统库基于C/C++语言实现,通过接口向应用程序框架层提
基于Android Studio的移动应用开发任务驱动教程 供编程接口。 应用框架层(Application Framework):为开发者提供了一系列的Java API,包括图形用户界面组件View、SQLite数据库相关的API、Service组件等。 应用程序层(Applications):包含了Android平台中各式各样的应用程序。 (2)简述Android开发环境安装的步骤。 参考答案: 下载并安装JDK,配置JDK的环境变量; 从Anroid官网上下载Android开发组件(包含Eclipse和Android SDK、ADT); 安装Android开发环境(包括配置Android SDK的环境变量、打开Eclipse通过菜单设定Android SDK路径)。 (3)简述Android Studio的优势。 参考答案:略。 (4)简述Genymotion模拟器的优势。 参考答案:略。 (5)简述Android应用程序创建和运行的步骤。 参考答案: 通过菜单创建Android应用程序,设置应用程序名、Android版本等基本信息。 单击菜单中的运行按钮可以直接运行Android项目(也可以通过菜单配置运行参数, 指定运行的模拟器)。 单元2 Android Studio的组成结构与基本操作 1.填空题 (1) res/layout (2) Activity、Bundle (3) XML (4) java代码文件 (5) AndroidManifest.xml (6) 打包成.apk文件 2.选择题 (1)如果需要创建一个字符串资源,需要将字符串放在res\values的哪个文件中?()B (2)新建的Android程序默认的布局方式是相对布局(RelativeLayout),该布局中包含一个()控件。 B (3)要让布局文件或者控件能够显示在界面上,必须要设置RelativeLayout和控件的
Linux设备驱动程序的概念、作用以及模块
Linux设备驱动程序的概念、作用以及模块 我们首先对linux系统整个框架要有个了解。Linux简化了分段机制,使得虚拟地址与线性地址总是一致,因此,Linux的虚拟地址空间也为0~4G。 Linux 内核将这4G字节的空间分为两部分,分别是用户空间(0~3G)和内核空间(3G~4G)。其中,用户空间存放的是应用程序,而内核空间存放的是内核,设备驱动和硬件。 为什么需要存在设备驱动呢?我们知道,内核是操作系统基本的部分,而操作系统是不能够直接控制硬件的,这样我们就需要设备驱动作为操作系统和硬件设备间的粘合剂,相当于一个中间人吧,负责上下两边的沟通。驱动负责将操作系统的请求传输,转化为特定物理设备控制器能够理解的命令。 这样我们就知道,驱动需要完成两大功能: 1、为linux内核提供调用接口。 2、控制硬件。因为寄存器是控制硬件的操作,所以驱动程序控制硬件,也就是要通过读写硬件寄存器达到控制硬件的目的。 内核是为应用程序服务的,其本质其实是函数的集合,内核要实现的功能我们可以分为两部门:基本功能和扩展功能。其中,基本功能包括进程管理,线程管理等等,而扩展功能,可以根据用户的需求自行添加。 下面我们就来探讨一下怎样向内核添加一项功能呢? 1、我们首先想到,肯定需要写一个功能函数,假如我们命名为fun.c,那么函数写好后,必须要和linux源码一起编译,生成zImage内核镜像文件。 2、重新编译内核。 这样就得到了新的内核,这种添加的方式我们称为静态添加。大家发现,每次修改一次fun.c,都要重新编译一次内核,灰常的麻烦,所以引进了内核模块机制,只需要加载或卸载模块,就可以动态的增加或者删除内核的功能,不用每次都重新编译,是不是很方便?那么接下来我们会想到,这个模块怎么就能和内核连接在一起呢?其实很简单,fun.c文件除了要实现功能呢,还需要包含和内核的接口,内核也提供了模块的接口,只要这两个接口一致,模块就可以融入内核,成为内核的一部分。Linux驱动程序都是以模块的形式存在的,所以我们称之为驱动模块。 所以我们总结出添加模块的步骤是: 1、写功能函数fun.c。 怎么样编写模块的源码文件,我们以一个Hello模块实例分析。 #include
51CTO学院-Android驱动与HAL开发实战视频课程
Android驱动与HAL开发实战视频课程 课程目标 本教程主要讲解了如何开发Android底层的驱动程序(Linux驱动),以及Android HAL的开发。并使用蜂鸣器等demo来讲解。 适用人群 了解Android的基本知识,想从事Android底层开发的学员。 课程简介 课程目标: 本教程主要讲解了如何开发Android底层的驱动程序(Linux驱动),以及Android HAL的开发。并使用蜂鸣器等demo来讲解。 适合对象: 了解Android的基本知识,想从事Android底层开发的学员。 学习条件: 熟悉Linux的基本操作和C语言 1 Android底层开发概述 [免费观看] 47分钟 本讲主要介绍了Android底层开发概况、Android底层架构、Linux驱动程序的基本结构等内容。 2 搭建开发环境 [免费观看] 44分钟 本讲主要介绍了如何搭建用于开发Android底层的开发环境。 3 源代码下载和编译 45分钟 本讲主要介绍了如何编译Android源代码和Linux内核源代码。并且如何下载这些系统的源代码。 4
搭建S3C6410开发板的测试环境 40分钟 本讲主要介绍了如何搭建S3C6410开发板(Android系统)的开发测试环境。本教程后面的蜂鸣器、LED驱动开发都会使用这个开发板进行开发和测试,其他类似的开发板也同样适用。不过需要向厂家或销售商索要相应的驱动。其余的例子也可以在手机和平板电脑上测试。 5 第一个Linux驱动_读写设备文件(1) [免费观看] 45分钟 本讲主要介绍了如何开发第一个有读写功能的Linux驱动程序(第一部分) 6 第一个Linux驱动_读写设备文件(2) [免费观看] 47分钟 本讲主要介绍了实现第一个Linux驱动的第二部分。 7 实现LED驱动(1) 42分钟 本讲主要介绍了实现LED驱动的基本方法,并实现了这个LED驱动(第一部分)。 8 实现LED驱动(2) 42分钟 本讲主要介绍了实现LED驱动的基本方法,并实现了这个LED驱动(第二部分)。 9 实现LED驱动(3) 47分钟 本讲主要介绍了实现LED驱动的基本方法,并实现了这个LED驱动(第三部分)。 10
虚拟声卡驱动程序Virtual Audio Cable使用方法
一:安装软件 点击setup.exe 选择是(Y) 选择I accept 选择Install 安装成功,点击“确定”按钮即完成安装。
二、软件的设置 点击桌面开始按钮----所有程序---Virtual Audio Cable—Control panel进入软件初始化设置。 在Cables中选择1(即首次设置一个虚拟通道),点击旁边的Set按钮生成通道Cable1. 在参数设置区将Line、Mic(可选可不选)、S/PDIF(可选可不选)三个选项后面的方框打钩,选中之后点击参数设置区内的设置按钮Set,即完成了,对虚拟声卡通道1的设置。
鼠标右键点击桌面右下角的喇叭----调整音频属性----<或者点击开始—控制面板---声音、语音和音频设备---声音和音频设备>弹出: 选择语音 此时语音部分的设置为原系统默认的设备,保持不变。
选择音频: 改变声音播放、录音的选项内容: 如上图将声音播放、录音的默认设备全部改为Virtual Cable 1。点击应用---确定即可。
三、打开录音机录音---录制电脑里播放出来的音频(不包含麦克风里的声音)----即“内录” 开始---所有程序—附件---娱乐---录音机 点击确定即可开始录音(注:此时可在电脑中打开相应的音频文件,开始录音)
此时音频波段显示有声音输入,但是电脑的耳机听不到正在播放的音频文件(属正常现象)。若想同时听到音频文件的内容点击桌面开始按钮----所有程序---Virtual Audio Cable—Audio Repeater。 修改为 点击Start即可听到正在录制的音频文件。 此时的录音即是通过虚拟声卡通道录制电脑里的声音的。
驱动程序的句柄
设备驱动程序通知应用程序的几种方法 1 异步过程调用(APC) Win32应用程序使用CreateFile()函数动态加载设备驱动程序,然后定义一个回调函数backFunc(),并且将回调函数的地址&backFunc()作为参数,通过DeviceIoControl()传送给设备驱动程序。设备驱动程序获得回调函数的地址后,将它保存在一个全局变量(如callback)中,同时调用Get_Cur_Thread_Handle()函数获取它的应用程序线程的句柄,并且将该句柄保存在一个全局变量(如appthread)中。当条件成熟时,设备驱动程序调用_VWIN32_QueueUserApc()函数,向Win32应用程序发送消息。这个函数带有三个参数:第一个参数为回调函数的地址(已经注册);第二个参数为传递给回调函数的消息;第三个参数为调用者的线程句柄(已经注册)。Win32应用程序收到消息后,自动调用回调函数(实际是由设备驱动程序调用)。回调函数的输入参数是由设备驱动程序填入的,回调函数在这里主要是对消息进行处理。 2 事件方式(VxD) 首先,Win32应用程序创建一个事件的句柄,称其为Ring3句柄。由于虚拟设备驱动程序使用事件的Ring0句柄,因此,需要创建Ring0句柄。用LoadLibrary()函数加载未公开的动态链接库Kernel32.dll,获得动态链接库的句柄。然后,调用GetProcAddress(), 找到函数OpenVxDHandle()在动态链接库中的位置。接着,用OpenVxDHandle()函数将Ring3事件句柄转化为Ring0事件句柄。Win32应用程序用CreateFile()函数加载设备驱动程序。如果加载成功,则调用DeviceIoControl()函数将Ring0事件句柄传给VxD;同时,创建一个辅助线程等待信号变成有信号状态,本身则可去干其它的事情。当条件成熟时,VxD置Ring0事件为有信号状态(调用_VWIN32_SetWin32Event()函数),这马上触发对应的Ring3事件为有信号状态。一旦Ring3事件句柄为有信号状态,Win32应用程序的辅助线程就对这个消息进行相应的处理。 3 消息方式 Win32应用程序调用CreateFile()函数动态加载虚拟设备驱动程序。加载成功后,通过调用DeviceIoControl()函数将窗体句柄传送给VxD,VxD利用这个句柄向窗体发消息。当条件满足时,VxD调用SHELL_PostMessage()函数向Win32应用程序发送消息。要让该函数使用成功,必须用#define来自定义一个消息,并且也要照样在应用程序中定义它;还要在消息循环中使用ON_MESSAGE()来定义消息对应的消息处理函数,以便消息产生时,能够调用消息处理函数。SHELL_PostMessage()函数的第一个参数为Win32窗体句柄,第二个参数为消息ID号,第三、四个参数为发送给消息处理函数的参数,第五、六个参数为回调函数和传给它的参数。Win32应用程序收到消息后,对消息进行处理。
Android驱动---LED驱动的编写汇总
Android驱动---LED驱动的编写 1.编写Android驱动时,首先先要完成Linux驱动,因为android驱动其实是在linux驱动基础之上完成了HAL层(硬件抽象层),如果想要测试的话,自己也要编写Java程序来测试你的驱动。 2.android的根文件系统是eclair_2.1版本。我会上传做好的根文件系统提供大家。这里要说的是,android底层内核还是linux的内核,只是进行了一些裁剪。做好的linux内核镜像,这个我也会上传给大家。android自己做了一套根文件系统,这才是android自己做的东西。android事实上只是做了一套根文件系统罢了。 假设linux驱动大家都已经做好了。我板子上有四个灯,通过ioctl控制四个灯,给定不同的参数,点亮不同的灯。 linux驱动代码因平台不同而有所不同,这就不黏代码了。 这是我测试linux驱动编写的驱动,代码如下: [cpp] view plaincopy #include
字符设备驱动程序课程设计报告
中南大学 字符设备驱动程序 课程设计报告 姓名:王学彬 专业班级:信安1002班 学号:0909103108 课程:操作系统安全课程设计 指导老师:张士庚 一、课程设计目的 1.了解Linux字符设备驱动程序的结构; 2.掌握Linux字符设备驱动程序常用结构体和操作函数的使用方法; 3.初步掌握Linux字符设备驱动程序的编写方法及过程; 4.掌握Linux字符设备驱动程序的加载方法及测试方法。 二、课程设计内容 5.设计Windows XP或者Linux操作系统下的设备驱动程序; 6.掌握虚拟字符设备的设计方法和测试方法; 7.编写测试应用程序,测试对该设备的读写等操作。
三、需求分析 3.1驱动程序介绍 驱动程序负责将应用程序如读、写等操作正确无误的传递给相关的硬件,并使硬件能够做出正确反应的代码。驱动程序像一个黑盒子,它隐藏了硬件的工作细节,应用程序只需要通过一组标准化的接口实现对硬件的操作。 3.2 Linux设备驱动程序分类 Linux设备驱动程序在Linux的内核源代码中占有很大的比例,源代码的长度日益增加,主要是驱动程序的增加。虽然Linux内核的不断升级,但驱动程序的结构还是相对稳定。 Linux系统的设备分为字符设备(char device),块设备(block device)和网络设备(network device)三种。字符设备是指在存取时没有缓存的设备,而块设备的读写都有缓存来支持,并且块设备必须能够随机存取(random access)。典型的字符设备包括鼠标,键盘,串行口等。块设备主要包括硬盘软盘设备,CD-ROM等。 网络设备在Linux里做专门的处理。Linux的网络系统主要是基于BSD unix的socket 机制。在系统和驱动程序之间定义有专门的数据结构(sk_buff)进行数据传递。系统有支持对发送数据和接收数据的缓存,提供流量控制机制,提供对多协议的支持。 3.3驱动程序的结构 驱动程序的结构如图3.1所示,应用程序经过系统调用,进入核心层,内核要控制硬件需要通过驱动程序实现,驱动程序相当于内核与硬件之间的“系统调用”。