基于分块自适应压缩感知的可逆水印算法
第35卷第4期电子与信息学报Vol.35No.4 2013年4月Journal of Electronics & Information Technology Apr. 2013
基于分块自适应压缩感知的可逆水印算法
张秋余孙媛*晏燕
(兰州理工大学计算机与通信学院兰州 730050)
摘要:针对数字图像可逆水印的高嵌入容量和不可见性的权衡问题,该文提出一种基于分块自适应压缩感知的可逆水印算法(Reversible Watermarking Algorithm Based on Block Adaptive Compressed Sensing, BACS-RWA)。
该算法对载体图像分块,利用周围块与目标块的统计关系判断块类型,自适应地选择容量参数进行分块压缩感知,并利用整数变换嵌入水印;为提高水印嵌入容量将水印嵌入到经压缩感知后的平滑和普通载体图像块中,复杂载体图像块不做处理,以确保图像质量和不可感知性;采用分块压缩重构算法和可逆整数变换来恢复载体图像。通过对不同纹理图像实验并与同类算法对比,结果表明:当以Plane为载体图像时,最佳嵌入容量达1.87 bpp。分块自适应压缩感知理论的引入使算法具有良好的综合性能,在提高嵌入容量的同时,又能有效地降低嵌入数据后对原始图像质量的影响。
关键词:数字图像;压缩感知;可逆水印;嵌入容量;分块自适应
中图分类号:TP391文献标识码:A 文章编号:1009-5896(2013)04-0797-08 DOI: 10.3724/SP.J.1146.2012.00914
A Reversible Watermarking Algorithm Based on
Block Adaptive Compressed Sensing
Zhang Qiu-yu Sun Yuan Yan Yan
(School of Computer and Communication, Lanzhou University of Technology, Lanzhou 730050, China) Abstract:To balance high embedding capacity and imperceptibility of reversible watermarking algorithm for digital images, a novel Reversible Watermarking Algorithm based on Block Adaptive Compressed Sensing (BACS-RWA) is proposed. The host image is divided into blocks and the types of these blocks are determined with the statistical relationship between the surrounding image blocks and the target block. The capacity parameters are adaptively selected to do block compressed sensing and the watermarking is embedded with integer transformation. In order to improve embedding capacity, the smooth and normal blocks of compressed sensing host image are used to embed watermarking. Complex blocks are not processed to insure image quality and imperceptibility. Reconstruction algorithm of block compressed sensing and reversible integer transformation are used to reconstruct the host image accurately. Simulation of this algorithm is performed on different texture images and compared with similar algorithms. Experimental results show that the optimal embedding capacity can reach up to 1.87 bpp when Plane is used as host image. The introduction of block adaptive compressed sensing theory leads to better comprehensive performance. It can not only improve embedding capacity, but also reduce effectively the influence of embedding data on the quality of the host image.
Key words:Digital image; Compressed Sensing (CS); Reversible watermarking; Embedding capacity; Block adaptive
1引言
近年来,在医学诊断、军事图像和遥感图像处理等数据准确性要求较高的应用领域中,国内外学者进行深入研究,提出了可逆水印技术。该算法除具备传统数字水印特点外,还可在水印系统接收端无失真地恢复原始载体图像信号。该技术通常需要
2012-07-16收到,2013-01-11改回
国家自然科学基金(61064011)和甘肃省自然科学基金(0803RJZA024)资助课题
*通信作者:孙媛 412sunyuan@https://www.360docs.net/doc/db6330065.html, 满足一些技术要求[1],如不可见性、高容量、安全性等。
可逆水印最早出现在1999年柯达公司的一项美国专利[2]中,利用求模的嵌入方法在图像中嵌入数据,使得提取算法在恢复嵌入数据的同时,还能够完全得到原始图像,但该方法嵌入容量较小。一般来说,可逆水印算法的性能评估主要体现在嵌入容量和不可见性。鉴于此,国内外学者提出一系列算法。如基于直方图平移算法[35]?,基于压缩技术的算法[6],基于整数变换的算法[710]
?。然而,对于单
798 电子与信息学报第35卷
嵌入过程的算法,很少有嵌入率达到1.0 bpp。为提高可逆水印算法的嵌入容量,文献[11]在文献[12]的基础上提出一种高容量可逆水印算法,当采用“Lena”图像为载体时,其嵌入率达到了1.7 bpp。文献[13]提出多种可逆水印算法以提高水印嵌入容量。文献[14]在此基础上改进了文献[13]提出的利用奇偶特性、和值不变特性和差值调节的可逆水印方案。但是,这些算法大多数具有高嵌入容量而失真大的特点,不利于可逆水印算法的实际应用。
针对上述问题,本文提出一种基于分块的高容量自适应压缩感知可逆水印算法(BACS-RWA)。将载体图像分成互不重叠的小块,利用周围块与目标块统计特性判断目标块类型,将这些块分成3类:光滑块集合、普通块集合、复杂块集合。复杂块不嵌入水印以增强不可见性,光滑块和普通块进行压缩感知后,自适应地压缩感知嵌入水印从而提高水印嵌入容量。
2 相关理论知识
2.1采用分块思想的优势
现有可逆图像水印算法中,水印嵌入阶段大多是把整幅图作为处理对象,进行统一操作,该类算法主要存在两点不足:一方面,在自然图像中,局部区域的特征与整幅图表现出的特征常有不同,在利用整幅图的特征确定相关参数时局部特征常被忽略掉,而从整幅图的特征得到的可逆图像水印嵌入参数、灰度溢出控制参数等并不能保证适用于局部区域的最佳参数;另一方面,不同图像区域水印嵌入能力会有差别,全图统一处理的方式没有充分利用这种特性,通常是不加区分地统一对待不同特性的区域。
采用基于图像分块思想的可逆水印算法,通过操作对象区域化,各区域操作相互独立,可以改善以上采用全图统一操作不足,增加可逆图像水印算法的性能。
2.2块类型的划分
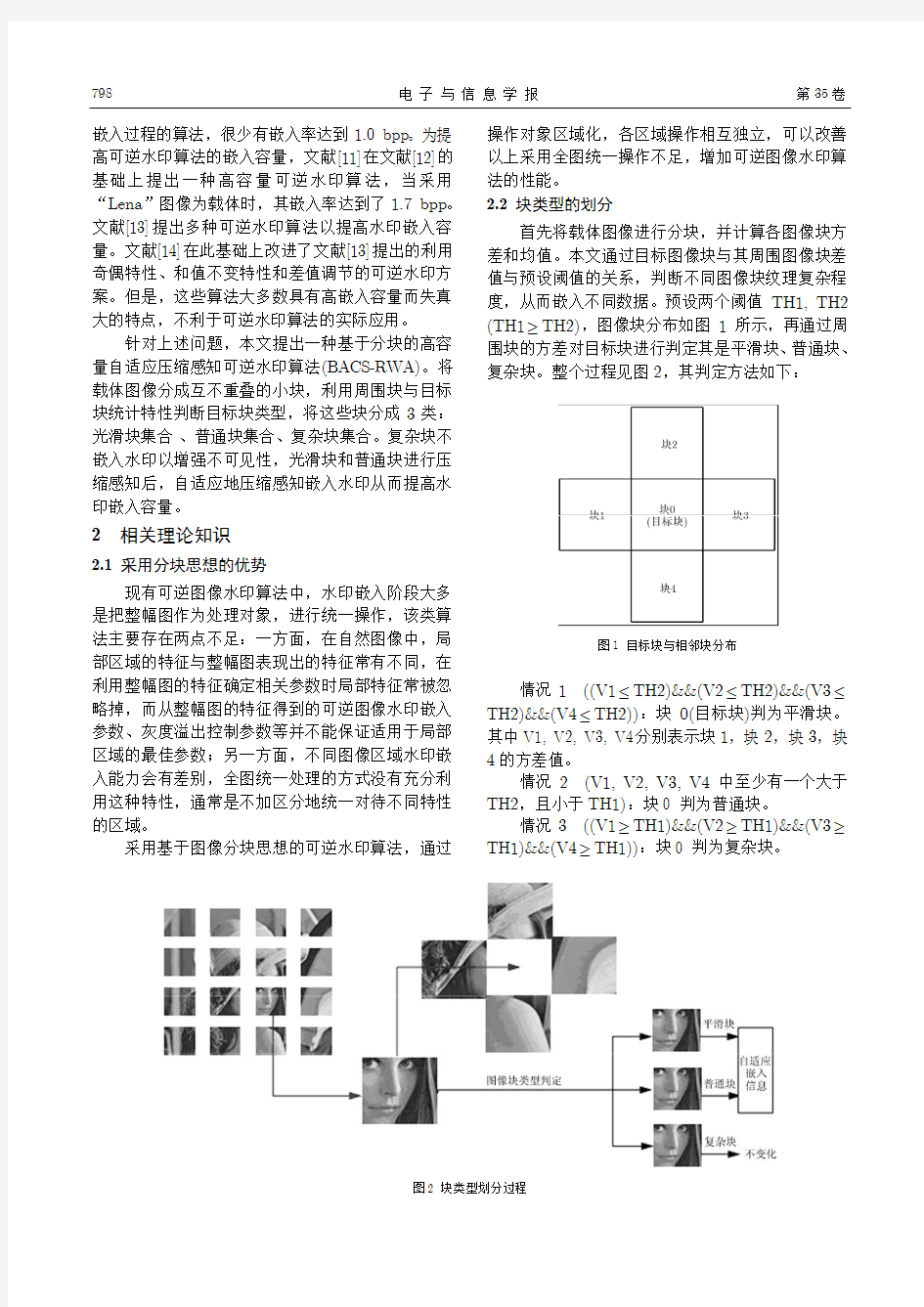
首先将载体图像进行分块,并计算各图像块方差和均值。本文通过目标图像块与其周围图像块差值与预设阈值的关系,判断不同图像块纹理复杂程度,从而嵌入不同数据。预设两个阈值TH1, TH2 (TH1≥TH2),图像块分布如图1所示,再通过周围块的方差对目标块进行判定其是平滑块、普通块、复杂块。整个过程见图2,其判定方法如下:
图1 目标块与相邻块分布
情况1 ((V1≤TH2)&&(V2≤TH2)&&(V3≤TH2)&&(V4≤TH2)):块0(目标块)判为平滑块。其中V1, V2, V3, V4分别表示块1,块2,块3,块4的方差值。
情况2 (V1, V2, V3, V4中至少有一个大于TH2,且小于TH1):块0 判为普通块。
情况3 ((V1≥TH1)&&(V2≥TH1)&&(V3≥TH1)&&(V4≥TH1)):块0 判为复杂块。
图2 块类型划分过程
第4期 张秋余等: 基于分块自适应压缩感知的可逆水印算法 799
2.3 基于分块的压缩感知
Candés 和 Donoho 于2006年正式提出了压缩感知(Compressed Sensing, CS)的概念,该理论突破了经典香农定理的瓶颈。其核心思想是将压缩与采样合并进行,首先采集信号的非自适应线性投影(测量值),然后根据相应重构算法由测量值重构原始信号。优点在于信号的投影测量数据量远远小于传统采样方法所获的数据量,使得高分辨率信号的采集成为可能。
大尺度整幅图像采样时,现有CS 方法存在计算复杂度高、存储压缩采样算子所需存储器规模大、重建时间长等问题,采用基于分块的压缩采样方法则能够实现较好的性能折中[15]。
首先将I r ×I c 维图像X 分成大小为B ×B 的小块,x i 为第i 个块的向量信号,i =1,",n , n =N /B 2, n 为块数,N 为像素数且满足N =n r ×n c ;然后对每个块采用相同的压缩采样算子,得到每个图像块的测量值向量y i ,即
i B i B i i i i ===y x s s ΦΦψΘ (1) 其中B Φ是个2B n B ×矩阵,其中测量维数n B = [nB 2/ N ],T i i i x =s ψ,对整幅图像来说观测矩阵Φ是一个具有如式(2)的块对角矩阵:
B B B ????????=????
????????%ΦΦΦΦ (2)
在分块CS 算法中仅需存储B Φ,而不需存储整
幅图像的测量矩阵Φ。采用l 2范数意义下的优化问题求解,则每个块的重构过程可表示为如式(3): T 121
min +TV(), s.t. i i i B i i λε? 1/2 221||||||, i i ε==∑x x 是期望 的噪声水平以控制重建的保真度,1λ是权重系数以权衡i ψ变换稀疏与有限差分稀疏性。式(3)可利用Lagrange 定理将其转化为式(4)的所示的无约束优化问题: 2 T 221 arg min i B i i i i λ?+x x y x Φψ (4) 式(4)中2λ是权重系数,在数据一致性与稀疏性之间进行权衡。本文在正交小波基下进行稀疏化,高斯矩阵作为测量矩阵,采用非线性共轭梯度算法和带回溯线搜索进行优化目标的重构[16]。 2.4 整数变换 设有两个整数数组101(,,,)n n +=∈x x x x Z ", =w 1(,w 2,,)()n n k ∈w w Z ",相应的数组y 与x ,w 关 系定义如下:101(,,,)(,)n n T Δ +==∈y y y y x w Z "。 00111()() ()n n n x x x x x x ααα?=?????=?+???????? ?=?+???y k y k w y k w # (5) 其中n , k 是两个整数且n ≥1, k >1, ()x α是个可逆 整数函数,定义如下: 2(1)(1)()2(1)n i i k k n x n α=????+????? =?+??????∑x (6) 其中??α表示对α下取整。 整数逆变换: 0001(1)1=++++12(+1)=()n i i i i i i i n k k n k n k k x α=?????????????????????????????????????+??? ∑y y y y x y w y x (7) 式(7)中x , y 分别代表给定像素块的原始值和嵌入水印后的值,w 代表嵌入的信息。 2.5 自适应整数变换 式(5)中基于整数变换的嵌入失真可以表示为式(8)的形式。 22220 ()(1)()n i i l i k V x =?=?≈?∑y x y x (8) 其中20()()n i i V x ==?∑x x ,由式(8)可得基于块的 嵌入失真主要由嵌入参数k 和方差V (x )决定。因此,为减少失真提高嵌入容量,需对k 进行自适应选择,k 需满足(k -1)2V (x )≤T , T 是预设值。 为避免数据溢出,设B ={x =(x 0,x 1,",x n )∈Z n : 0≤x i ≤255}是大小为n +1所有灰度图像的像素值数组,其子集为 0{:0()255, 0()256(1,,)}k i k x k x k i n αα=∈≤?≤≤?≤?=B x B x x " (9) 为提高嵌入容量,对于任意块x ∈B ,本文将自 适应地选择容量参数k x ,一般取为2的整数幂,令 式(5)中的k =k x ,则2log x k n bit 水印信息将嵌入到x 中,k x 的自适应选择过程如表1所示。 因此,自适应整数变换过程可由式(5)更改为如下: 00111()() ()x x n x n n k x k x k x ααα?=?????=?+???????? ?=?+???y x y x w y x w # (10) 综上可见,嵌入容量参数k x 主要由分块类型及 方差决定,方差越小,块越平滑,失真也小。故本 800 电 子 与 信 息 学 报 第35卷 表1 k x 的自适应选择过程 for pixel block x sized n +1; 计算像素块x 的方差V (x ); case1: V (x )>T , do k x =1; case2: T /9 case3: T /49 go to label 1; end if case4: V (x )≤T /49 判断x 是否属于B 8; if(x ∈B 8), then k x =8; else go to label 2; end if; end 文自适应地选择k x ,在相应的块中嵌入大量水印信息,以提高水印嵌入容量,保证较好的图像质量。 3 BACS-RWA 算法实现过程 3.1 嵌入算法步骤 步骤 1 将载体图像X 分成N 个非重叠小块x =(x 0,x 1,",x n )∈Z n +1, x i 是x 中任一块; 步骤 2 按照2.2节方法将所得小块分为3类块的集合:滑块集合I 1 ,普通块集合I 2 ,复杂块集合I 3; 步骤 3 利用光栅扫描的方式对嵌入区按照从右到左,从下到上的顺序扫描嵌入区,I 1, I 2进行分块CS 随机投影,I 3不做变化,相应地得到压缩感 知后的随机投影测量值12, '' I I 集合。利用2.4节自适应整数变换方法确定相应块的容量参数k x ; 步骤 4 根据上一步建立比特序列记录 Location Map(LM),其中 121, LM 0, i i ?∈? ?=? ?∈?? x I x I (11) 同时采用行程编码(Run-Length Encoding, RLE)对LM 进行无损压缩得到CLM 。 步骤 5 分别对1 2, ''I I 进行自适应整数变换,并根据k x 对1 2, ''I I 利用自适应整数变换嵌入水印信息,记录得到的y i 的LSB ,得到了一个二进制序列,利用LSB 替代嵌入CLM ,将二进制序列用整数变换 嵌入到x i 中,最后结合I 3即可得到含水印图像I w 。 嵌入算法的伪代码过程如表2所示。 表2 嵌入算法的伪代码过程 输入:载体图像I ,水印w 输出:水印图像I w for each pixel block x i in B k if x i ∈I 1, then 对I 1中的x i 1(即I 1类中的任意块x i )利用式(1)进行 分块CS 随机投影,即 1111i B i B i i i i ψ===y x s s ΦΦΘ 利用式(10)对y i 1进行自适应整数变换,嵌入 水印信息w 和CLM else if x i ∈I 2, then 对I 2中的x i 2(即I 2类中的任意块x i )利用式(1)进行 分块CS 随机投影,即 2222i B i B i i i i ===y x s s ΦΦψΘ 利用式(10)对y i 2进行自适应整数变换,嵌入 水印信息w 和CLM else x i ∈I 3, then 对I 3不做处理,即该块不嵌入信息 end end 3.2 提取算法步骤 水印提取算法流程图如图3所示。 步骤 1 将水印图像I w 分成N 个非重叠小块I w =(i w 0,i w 1,",i wn )∈Z n +1,i wi 是I w 中任一小块; 步骤 2 用与嵌入过程中光栅扫描顺序相反的顺序即从左到右,从上到下进行扫描图像块,读取i wi 的LSB ,得到压缩的位置图CLM ; 步骤 3 解压CLM 即得位置图LM ,从而得 图3 水印提取算法流程图 第4期 张秋余等: 基于分块自适应压缩感知的可逆水印算法 801 TH1, TH2, T ,据此判断出块类型,分为光滑块I 1,普通块I 2、复杂块I 3; 步骤 4 对得到的复杂块I 3不做处理, 利用2.3节基于块压缩感知的重构方法对平滑块I 1,普通快I 2利用重构算法进行块重构,得出压缩感知后的随机投影测量值; 步骤 5 根据步骤 3得到位置图相关信息确定 各块的容量参数k x , 对步骤4中I 1, I 2的重构结果进行自适应整数逆变换即可得到水印信息w 和原始载体I 。 4 实验结果及分析 所有实验均在Dell Inspiron N4010笔记本电脑,i3 CPU, 2 G 内存,Win7操作系统下以MATLAB7.8为实验平台得到。选择4幅标准的具有不同纹理特征的512×512的8 bit 灰度载体图像如图4(a)-4(d),包括Lena, Baboon, Plane(F-16)和Sailboat ,采用随机函数(rand)随机生成的随机比特序列作为水印信息,性能评价标准以数据嵌入比特率(BPP)和峰值信噪比(PSNR)来衡量。 4.1 阈值的选择 为提高水印嵌入容量,本文进行了2×2, 4×4, 8×8, 16×16分块实验。现以其一种情况为例说明阈值选择,其它分块情况原理相同。首先计算4类载体图像分块后对应的每个块中各像素的均值(mean)和方差(var),如表3,对应块号的数字组成顺序就是其分块后行列号。当分块为16×16时,分别对4种情况的方差和均值进行了相应计算并用于实验中阈值,权衡水印容量、图像质量及算法综合性能,自适应容量参数选择中T 取表3结果的4类载体块方差的均值1.3229e+003, TH1, TH2分别设为相应载体的方差的最大值和最小值,据文中判定方法可确定块类型。 4.2 不同分块数目对算法性能的影响 本文每个块的嵌入率为2/(1)log k n n +,嵌入容量随着图像块大小的增大而增大。但如果块太大, 其噪声越大,方差也越大。权衡嵌入容量和失真度,选择适当的块是非常重要的。 图5以Lena 为例可以看出由分块2×2到4×4时,嵌入容量较高且图像不可见性能较好。然而当增加到8×8时性能居两者之间,当分块为16×16 时PSNR 值略高于4×4,最大嵌入容量达到 1.8 bpp ,而其它分块最大嵌入容量均低于此值。其主要原因一方面在于块越大嵌入率就越大,但分块太大的话不能嵌入的点比较多,从而位置图比较大;另一方面由于本算法中采用了分块压缩感知理论,不同分块尺寸会影响重建效果和时间。随着分块尺寸的减小,在重建图像中子空间(或块)的边界更容易形成明显的块边界,视觉效果逐渐降低,得出的峰值信噪比也逐渐降低,当分块为16×16时其重建效果较好且重建时间适中,故表现出最优性能。而8×8分块重建时,块效应相对较突出,影响了其重建质量。 本文采用了4幅载体图像分别进行了2×2, 4×4, 8×8, 16×16分块嵌入,其对应的最大嵌入率如图6所示,经多次实验得最佳分块为16×16分块。采用本文嵌入算法后最大嵌入率也有差异,其中Lena 为1.8 bpp, Baboon 为0.8 bpp, Plane 为1.87 bpp, Sailboat 为1.6 bpp 。 4.3 算法综合性能与其他文献方法比较 为验证BACS-RWA 算法的优越性,实验选择16×16分块,采用相同载体图像和水印,选取文献[17],文献[18]和文献[19]3种可逆水印算法进行对比实验。从图7(a)-7(d)综合性能对比实验结果可以看出,BACS-RWA 具有较好的水印容量-失真性能。 图7(a)是基于局部水印嵌入能力差别较小的Lena 图像的综合性能对比曲线图。在高嵌入率下的质量较高,其PSNR 值在嵌入率高达1 bpp 时仍高于35 dB ;当嵌入率小于0.4时,文献[19]的算法在分块处理表现出的效果不太明显,PSNR 性能略低于文献[18]算法,而文献[17]算法性能在 1 bpp 范 图4 实验采用的载体图像 802 电子与信息学报第35卷 表3不同载体图像4×4块均值和方差 Lena Baboon Plane Sailboat 块号 均值方差(e+003) 均值方差(e+003)均值方差(e+003)均值方差(e+003) 11 123.5413 0.2624 124.0668 1.7230 189.9633 0.3354 147.4306 1.1835 12 137.6106 0.2944 95.3823 1.8727 195.7413 0.1074 121.3079 1.4559 13 144.6990 1.2286 108.7864 1.9628 194.9675 0.2629 121.7761 1.4267 14 114.5562 2.0189 132.9147 1.5379 189.8926 1.0079 155.5814 1.4043 21 118.4287 0.1662 108.4250 1.5525 146.6660 3.2963 152.4581 1.7514 22 118.0851 1.6739 156.6109 0.4061 183.9874 1.7994 23.2599 2.2239 23 128.1681 1.9387 161.8045 0.2561 182.7225 2.5382 128.2671 1.8985 24 128.1681 1.9387 129.9618 1.0715 198.6771 1.0127 162.1959 2.1322 31 108.3574 0.5092 118.8912 1.4724 150.8907 2.6315 92.1467 1.8175 32 94.0710 1.6999 135.9246 0.9624 142.0494 2.4056 80.6376 1.4181 33 116.7414 1.1679 139.6003 0.9971 150.5696 2.3135 84.1156 1.6172 34 160.1684 0.6794 101.3355 0.5821 213.5654 0.3162 95.4019 2.0796 41 98.8905 0.7236 147.5552 0.7078 207.6251 0.1298 134.7941 1.3503 42 87.2841 0.8948 146.0589 1.2674 179.4195 1.2269 126.3481 1.3048 43 152.6734 1.5852 139.0928 1.3496 173.7396 1.5642 140.7401 0.8559 44 121.2502 1.4567 127.2883 0.7370 166.4626 1.7131 146.2935 1.3890 平均122.0433 1.1399 129.6062 1.1536 179.1837 1.4163 119.5472 1.5818 图5 Lena 进行不同分块性能曲线图6 不同载体进行4种分块的嵌入率 图7 算法综合性能对比 第4期张秋余等:基于分块自适应压缩感知的可逆水印算法803 围内都低于其他算法,这是因为其灰度溢出采用的是灰度直方图最小合并项合并压缩的方案。本文算法最高嵌入容量可达到1.8 bpp,文献[19]算法嵌入容量不足1.4 bpp,文献[18]算法嵌入容量不足1.2 bpp,而文献[17]最大嵌入容量仅1 bpp。 图7(b)是基于载体图像为Baboon的综合性能对比曲线。由于Baboon是4幅图像中纹理最复杂的图像,图像的质量随着嵌入数据量的增多下降较快,在嵌入率为0.1 bpp时4种方法PSNR值差异不明显,当嵌入率达到0.4 bpp时,利用BACS-RWA 嵌入数据后的图像的 PSNR比文献[19],文献[18]和文献[17]算法分别高2 dB, 4 dB, 5 dB,表现出了良好的性能。随着嵌入信息量的增多,复杂的纹理对图像质量影响越来越严重,但其PSNR仍高于其他算法。 图7(c)采用了纹理较为简单的Plane(F-16)为载体图像,图像整体相对于其它3种载体最平滑,像素块的差值小,使用较小的阈值则可以将图像划分成不同的类型,平滑区域能产生较多的嵌入信息可用像素。因此,嵌入率比较高,图像质量较好,综合性能较稳定。而另外3种算法当嵌入率达1.2 bpp 附近时图像的PSNR均达到了30 dB,在嵌入率为0.7 bpp附近时,文献[19]算法与本文算法性能相差较小,本文算法最大嵌入率达到最大值1.87 bpp。 图7(d)是对Sailboat进行实验对比结果,嵌入率在0.2 bpp附近时文献[18]算法PSNR值略微高于本文算法,但随着其嵌入率的增大,文献[18]和文献[17]算法的PSNR值明显下降,而文献[19]算法中未对该载体图进行实验,本文算法的综合性能曲线则较平稳,且当达到最大嵌入率时其PSNR值依然高于24 dB。 本文选取3个固定嵌入率0.5 bpp, 1.0 bpp和1.2 bpp进行相应的PSNR对比,结果如表4所示。 表4中的“-”表示由于图像本身特性无法进行相应实验测量。从表中可以看出,在所选嵌入率相同的情况下,当在嵌入率为0.5 bpp时,本文算法的平均PSNR高于文献[18]2.84 dB,高于文献[19]2.1 dB;随着嵌入率升高,当达到1.0 bpp时,本文算法平均PSNR高于文献[18]2.3 dB,高于文献[19]1.3 dB;在相同嵌入率为1.2 bpp时,本文算法平均PSNR分别高于文献[18]3.15 dB,高于文献[19]1.45 dB。出现此差异主要原因是文献[17]采用的线性预测误差相比其他算法的预测误差要发散,相比而言,该算法性能稍差,但性能比较平稳,这归功于其灰度直方图调整采用了最小合并项的方案。文献[18]采用基于直方图位移的插值技术的可逆图像水印,由于取得较集中的预测误差直方图,在小嵌入量时算法性能较高,但不足的是灰度溢出控制方案对于在最亮或最暗端含有较大比例像素的宿主图像,由于辅助信息无法完整保存导致嵌入失效。文献[19]在水印嵌入能力强的局部区域水印分配的多,嵌入弱的分配的少,但其通过迭代处理后不可避免地产生了失真从而影响图像质量。由此可见,本文算法具有较好的图像质量,适于高容量水印信息嵌入。 5 结束语 本文提出一种基于分块自适应压缩感知的数字图像可逆水印算法。利用分块理论判断块类型并进行压缩感知,自适应选择嵌入容量系数进行整数变换嵌入信息,以提高水印容量。避免了噪声块引起的较大失真,更多的水印嵌入到光滑块和普通块中,提高了水印嵌入容量同时确保了图像质量,不可见性较好。实验结果表明:该算法较以往可逆水印算法相比在嵌入容量和不可见性等综合性能上都具有优越性。 表4相同嵌入率下PSNR值对比(dB) 嵌入率嵌入率为0.5 bpp时嵌入率为1.0 bpp时嵌入率为1.2 bpp时 载体图文献[18] 文献[19] 本文算法文献[18] 文献[19] 本文算法文献[18] 文献[19] 本文算法 Lena 42.5 42.8 44.1 33.2 34.5 35.9 -32.0 33.5 Baboon 30.9 32.5 35.5 - ----- Plane 42.8 43.1 45.1 34.3 35.0 36.2 30.9 33.2 34.6 Average 38.73 39.47 41.57 33.75 34.75 36.05 30.90 32.60 34.05 参考文献 [1]Tian J. Reversible data embedding using a difference expansion[J].IEEE Transactions on Circuits System Video Technology, 2003, 13(8): 890-896. [2]Honsinger C W, Jones P, Rabbani M, et al.. Lossless recovery of an original image containing embedded data[P]. US, Patent, US006278791B1, 2001-08-21. [3]Tai W L, Yeh C M, and Chang C C. Reversible data hiding based on histogram modification of pixel differences[J]. IEEE Transactions on Circuits System Video Technology, 2009, 19(6): 906-910. 804 电子与信息学报第35卷 [4]Chung Kuo-liang, Huang Yong-huai, Yan Wen-ming, et al.. Distortion reduction for histogram modification-based reversible data hiding[J]. Applied Mathematics Computation, 2012, 218(9): 5819-5826. [5]王俊祥, 倪江群, 潘金伟. 一种基于直方图平移的高性能可逆 水印算法[J]. 自动化学报, 2012, 38(1): 88-96. Wang Jun-xiang, Ni Jiang-qun, and Pan Jin-wei. A high performance reversible watermarking scheme based on histogram shifting[J]. Acta Automatica Sinica, 2012, 38(1): 88-96. [6]Celik M U, Sharma G, Tekalp A M, et al.. Lossless generalized-LSB data embedding[J]. IEEE Transactions on Image Processing, 2005, 14(2): 253-266. [7]Peng Fei, Li Xiao-long, and Yang Bin. Adaptive reversible data hiding scheme based on integer transform[J]. Signal Processing, 2012, 92(1): 54-62. [8]Alattar A M. Reversible watermark using the difference expansion of a generalized integer transform[J]. IEEE Transactions on Image Processing, 2004, 13(8): 1147-1156. [9]朱立, 赵耀, 倪蓉蓉. 基于混合整数变换的高容量可逆数字水 印[J]. 数据采集与处理, 2010, 25(2): 188-194. Zhu Li, Zhao Yao, and Ni Rong-rong. High-capacity reversible watermarking based on mixed integer transform[J]. Journal of Data Acquisition and Processing, 2010, 25(2): 188-194. [10]Arsalan M, Malik S A, and Khan A. Intelligent reversible watermarking in integer wavelet domain for medical images[J]. Journal of Systems and Software, 2012, 85(4): 883-894. [11]Chaumont M and Puech W. A high capacity reversible watermarking scheme[C]. Proceedings of the SPIE-IS&T Electronic Imaging, Visual Communications and Image Processing, San Jose, California, USA, Sept. 11-12, 2009, SPIE Vol. 7257: 1-9. [12]Coltuc D. Improved capacity reversible watermarking[C]. Proceedings of the 14th IEEE International Conference on Image Processing(ICIP’07), San Antonio, TX, USA, Sept. 16 -Oct. 19, 2007, Vol.3: 249-252. [13]翁韶伟. 数字图像的高容量可逆水印研究[D]. [博士论文]. 北 京交通大学, 2009. Weng Shao-wei. Research on high-capacity reversible watermarking algorithms[D]. [Ph.D. dissertation], Beijing Jiaotong University, 2009. [14]吕林涛, 张玺. 改进的大容量可逆数字水印嵌入算法[J]. 计算 机工程, 2011, 37(22): 107-109. Lv Lin-tao and Zhang Xi. Improved large capacity reversible digital watermark embedding algorithm[J]. Computer Engineering, 2011, 37(22): 107-109. [15]赵春晖, 刘巍. 基于分块压缩感知的图像半脆弱零水印算法 [J]. 自动化学报, 2012, 38(4): 609-617. Zhao Chun-hui and Liu Wei. Block compressive sensing based image semi-fragile zero-watermarking[J]. Acta Automatica Sinica, 2012, 38(4): 609-617. [16]Lustig M, Donoho D L, and Pauly J M. Sparse MRI: the application of compressed sensing for rapid MR imaging[J]. Magnetic Resonance in Medicine, 2007, 58(6): 1182-1195. [17]Tsai P, Hu Y C, and Yeh H L. Reversible image hiding scheme using predictive coding and histogram shifting[J]. Signal Processing, 2009, 89(6): 1129-1143. [18]Luo Li-xin, Zheng yong, Chen Ming, et al.. Reversible image watermarking using interpolation technique[J]. IEEE Transactions on Information Forensics and Security, 2010, 5(1): 187-193. [19]罗剑高. 可逆图像水印及可逆图像认证技术研究[D]. [博士论 文], 华南理工大学, 2011. Luo Jian-gao. Research of reversible image watermarking and reversible image authentication techniques[D]. [Ph.D. dissertation]. South of China University of Technology, 2011. 张秋余:男,1966年生,研究员,博士生导师,主要研究方向为网络与信息安全、信息隐藏与隐写分析、图像理解与识 别、多媒体通信技术. 孙媛:女,1986年生,硕士生,研究方向为多媒体信息安全、数字水印、隐写分析. 晏燕:女,1980年生,博士生,研究方向为多媒体信息安全、数字水印、隐写分析. 2011.No31 0 3.2 熟悉结构施工图 结构施工图是关于承重构件的布置,使用的材料、形状、大小及内部构造的工程图样,是承重构件以及其他受力构件施工的依据。 看结构施工图最难的就是钢筋,要把结施图看懂就要知道钢筋的分布情况,现在都是在使用平法来标示钢筋,所以也要把平法弄懂才行。在识读与熟悉结施图的过程中应该充分结合钢筋平法表示的系列图集,搞清楚: a 各结构构件的钢筋的品种,规格,以及受力钢筋在各构件的布置情况。 b 箍筋与纵向受力钢筋的位置关系。 c 各个构件纵向钢筋以及箍筋弯钩的角度及其长度。 d 熟悉各构件节点的钢筋的锚固长度。 e 熟悉各个构件钢筋的连接方式。 f 熟悉在钢筋的搭接区域内,钢筋的搭接长度。 g 核算钢筋的间距是否满足施工要求,尤其是各个构件节点处的钢筋间距。 h 弯起钢筋的弯折角度以及离连接点的距离。 除此以外,对于钢筋混凝土构件,还应该熟悉各个构件的砼保护层厚度,各个构件的尺寸大小、布置位置等。特别注意的是对于结施图的阅读应充分结合建施图进行。 4 结束语 在熟悉施工图纸的过程中,施工技术人员对于施工图纸中的疑问,和比较好的建议应该做好记录,为后续工作(图纸自审和会审)做好准备。 参考文献 [1]《建筑识图》周坚主编 中国电力出版社 2007年;[2]《建筑工程项目管理》银花主编 机械工业出版社 2010年; 摘 要 压缩感知(Compressive Sensing, CS)理论是一个充分利用信号稀疏性或可压缩性的全新信号采集、编解码理论。本文系一文献综述,主要介绍了压缩感知的三部分即信号的稀疏表示、测量矩阵的设计、信号恢复算法的设计。 关键词 压缩感知 稀疏表示 测量矩阵 信号恢复算法 1 引言 1928年由美国电信工程师H.奈奎斯特(Nyquist)首先提出,1948年信息论的创始人C.E.香农(Shannon)又对其加以明确说明并正式作为定理引用的奈奎斯特采样定理,是采样带限信号过程所遵循的规律。它指出:在进行模拟/数字信号的转换过程中,当采样频率fs.max大于信号中最高频率fmax的2倍时(fs.max>=2fmax),采样之后的数字信号完整地保留了原始信号中的信息。一般实际应用中保证采样频率为信号最高频率的5~10倍。该理论支配着几乎所有的信号/图像等的获取、处理、存储、传输等。随着科技的发展,成为目前信息领域进一步发展的主要瓶颈之一,主要表现在两个方面: (1)数据获取和处理方面。在许多实际应用中(例如超宽带信号处理、核磁共振、空间探测等),Nyquist采样硬件成本昂贵、获取效率低下,信息冗余及有效信息提取的效率低下,在某些情况甚至无法实现。 (2)数据存储和传输方面。通常的做法是先按照Nyquist方式获取数据,然后将获得的数据进行压缩,最后将压缩后的数据进行存储或传输,这样会造成很大程度的资源浪费。另外,为保证信息的安全传输,通常以某种方式对信号进行编码,这给信息的安全传输和接收带来一定程度的麻烦。 近年来,由D .D o n o h o (美国科学院院士)、E . Candes(Ridgelet, Curvelet创始人)及华裔科学家T. Tao(2006年菲尔兹奖获得者,2008年被评为世界上最聪明的科学家)等人提出了一种新的信息获取指导理论,即压缩感知(Compressive Sensing(CS),或称Compressed Sensing、Compressed Sampling)。该理论指出:对可压缩的信号通过远低于Nyquist标准的方式进行数据采样,仍能够精确地恢复出原压缩感知简介 刘太明1 黄 虎2 (1、成都理工大学,四川成都,610059;2、成都理工大学,四川成都,610059) 始信号。该理论一提出,就在信息论、信号/图像处理、医疗成像、模式识别、地质勘探、光学/雷达成像、无线通信等领域受到高度关注,并被美国科技评论评为2007年度十大科技进展。 2 CS基本原理 信号x∈R n×1压缩传感的测量过程可以表示为y=Ax∈R M×1,M< 第一大题:名词解释(1-9为重点) 1.隐秘信道:指允许进程以危害系统安全策略的方式传输信息的通信信道。利用计算机系统中的未使用和保留的空间,利用计算机系统中的隐通道,利用密码协议中的阈下信道。 2.隐写术:把秘密消息隐藏于其他信息当中,其中消息的存在形式较为隐秘。隐写术的目的是在不引起任何怀疑的情况下秘密传送消息,因此它的主要要求是不被检测到和大容量等。 3.数字水印:数字水印是指嵌在数字产品中的数字信号,可以是图像,文字,符号,数字等一切可以作为标识和标记的信息;其目的是进行版权保护、所有权证明、指纹(追踪发布多份拷贝)和完整性保护等。 4.数字指纹:每个水印都是一系列编码中唯一的一个编码,即水印中的信息可以唯一地确定每一个数字产品的拷贝,因此,称它们为指纹或标签。 5.脆弱水印:脆弱水印是一种在数字图像作品发生任何形式的改变时都无法检测出来的水印。 6.可见水印:电视屏幕左上角的电视台的台标是肉眼可以看见的水印,即可见水印。 7.嵌入域:指数字水印嵌入时载体的组织形式,一般有空间域和变换域。 8.盲隐藏:若在提取隐藏信息时不需要利用原始载体,则称为盲隐藏。 9.索引图像:是一种把像素值直接作为RGB 调色板下标的图像。索引图像可把像素值“直接 映射”为调色板数值。 10.数字内容:以数字形式存在的文本、图像、声音等信息,它可以存储在如光盘、硬盘等数字载体上,并通过网络等手段传播。 11.对称密钥加密:又叫专用密钥加密,即发送和接收数据的双方必须使用相同的密钥对明文进行加密和解密运算。 12.公钥加密:又叫非对称密钥加密,用两个密钥:一个公共密钥和一个专用密钥。用户要保障专用密钥的安全;公共密钥则可以发布出去。用公钥加密的信息只能用专用密钥解密。 13.空域信息隐藏技术:指在图像、视频、音频等载体的空间域上进行信息隐藏。通过直接改变宿主媒体的某些像素值(采样值)来嵌入数据。 14.变换域信息隐藏技术:信息隐藏过程是在变换域中进行的。借助信号进行正交变换后能量分布的特点,在变换域中进行信息隐藏,可以较好的解决不可感知性和稳健型的矛盾。 15.可逆数字水印:数字水印提取后,原宿主信息能无损恢复的数字水印方案被称为可逆数字水印。 16.LSB:即最不重要比特位。基于LSB的数字水印算法就是将水印信息嵌入到图像每个像素的最后一位,对图像效果影响很小。 17.鲁棒性:指数字图像经过一些处理、数字图像数据发生一定程度的变化后,版权所有者仍然可以证明水印的存在。 第二大题简答题(1-3题为重点) 1.数字图像有哪几种置乱算法,每一种算法有哪些特点? 答:①Arnold变换:可以看作是裁剪和拼接的过程。通过这一过程将离散化的数字图像矩阵中的点重新排列。由于离散数字图像是有限点集,这种反复变换的结果,在开始阶段s中像素点的位置变化会出现相当程度的混乱,但由于动力系统固有的特性,在迭代进行到一定步数时会恢复到原来的位置,所以保密性不高。 ②基于色彩空间的置乱加密技术是通过置乱原始图像象素的灰度值或色彩值,起到扰乱原图信息的目的。比如基于灰度变换的置乱加密方法,其思想来源于数字图像处理中的灰度直方图变换。 ③采用密码学加密算法对图像灰度进行变换,研究空间更广泛,算法运行时间较短。人们意识到置乱加密技术不仅可以考虑将图像的像素位置置乱,像素灰度值也可以进行置乱处理,因此提出了准逆序置乱和准抖动置乱,这是针对数字图像灰度空间中两种变换的置乱加密。在图像信息隐蔽存储与传输中具有重大的应用价值。 压缩感知的重构算法 算法的重构是压缩感知中重要的一步,是压缩感知的关键之处。因为重构算法关系着信号能否精确重建,国内外的研究学者致力于压缩感知的信号重建,并且取得了很大的进展,提出了很多的重构算法,每种算法都各有自己的优缺点,使用者可以根据自己的情况,选择适合自己的重构算法,大大增加了使用的灵活性,也为我们以后的研究提供了很大的方便。 压缩感知的重构算法主要分为三大类: 1.组合算法 2.贪婪算法 3.凸松弛算法 每种算法之中又包含几种算法,下面就把三类重构算法列举出来。 组合算法:先是对信号进行结构采样,然后再通过对采样的数据进行分组测试,最后完成信号的重构。 (1) 傅里叶采样(Fourier Representaion) (2) 链式追踪算法(Chaining Pursuit) (3) HHS追踪算法(Heavy Hitters On Steroids) 贪婪算法:通过贪婪迭代的方式逐步逼近信号。 (1) 匹配追踪算法(Matching Pursuit MP) (2) 正交匹配追踪算法(Orthogonal Matching Pursuit OMP) (3) 分段正交匹配追踪算法(Stagewise Orthogonal Matching Pursuit StOMP) (4) 正则化正交匹配追踪算法(Regularized Orthogonal Matching Pursuit ROMP) (5) 稀疏自适应匹配追踪算法(Sparisty Adaptive Matching Pursuit SAMP) 凸松弛算法: (1) 基追踪算法(Basis Pursuit BP) (2) 最小全变差算法(Total Variation TV) (3) 内点法(Interior-point Method) (4) 梯度投影算法(Gradient Projection) (5) 凸集交替投影算法(Projections Onto Convex Sets POCS)算法较多,但是并不是每一种算法都能够得到很好的应用,三类算法各有优缺点,组合算法需要观测的样本数目比较多但运算的效率最高,凸松弛算法计算量大但是需要观测的数量少重构的时候精度高,贪婪迭代算法对计算量和精度的要求居中,也是三种重构算法中应用最大的一种。下面分别就贪婪算法中的MP,OMP算法以及凸松弛算法中的BP算法进行详细的介绍。 三种重建算法 本节主要是介绍一些基本的重建算法,比如贪婪迭代算法中的匹配追踪算法,正交匹配追踪算法,以及凸松弛算法中的基追踪算法,对其原理进行了介绍,并用matlab代码重构出来一维和二维的图形,进而比较这几种算法的性能。 数字水印算法列举 湖南科技大学计算机科学与工程学院 ①基于LSB 的数字水印方案(空间域、不可逆、不可见和盲检测) 嵌入步骤: (1)先把水印信息转化为二进制比特流I。 (2)根据I的长度生成密钥K,并且严格保存。密钥K是对图像载体像素位置的一个映射。 (3)把I中的每一位依次根据密钥K,置换掉原始载体图像中相应位置的像素最后一位。提取步骤: (1)根据严格保存的密钥K遍历嵌入了水印的图像中的相应像素,提取出最后一位。 (2)将提取出来的每一位重新组合成水印信息。 ②基于差分扩展的数字水印方案(变换域、可逆、不可见和盲检测) 嵌入步骤: (1)将图像M分成像素点对(x,y),将水印信息转化为二进制比特流,比特流的每一位用m 表示。 (2)根据水印信息比特流的长度随机生成信息的嵌入位置k作为密钥信息严格保存。(3)对图像M计算均值l和差值h:?????-=+=y x h y x floor l 2((floor表示向下取整) (4)将水印比特信息m以差值扩展的方法嵌入到差值h中:m h h +?='2(5)将得到的h '代入(3)中,得到新的图像像素对,形成嵌入秘密信息后的图像C。提取步骤: (1)将图像C分成像素点对(x,y),读入密钥信息K。 (2)将图像C依旧按照嵌入步骤中的(3)式计算均值l和差值h。 (3)根据密钥k找到相应位置,提取差值h的最后一位比特信息m,再将差值h进行变换得到1>>='h h 。 (4)将提取到的比特信息m进行组合可以恢复水印信息,将得到的h '代入嵌入步骤的(3)中计算新的图像像素对可以恢复原始图像载体M。 ③基于直方图修改的数字水印算法(空间域、可逆、不可见和盲检测) 嵌入步骤:(1)找到直方图的零点z和峰值点p,将z v p <<的像素值v自加1。 (2)漂移后的直方图v=p处即为嵌入水印的位置,将水印信息转化为二进制流并记为k,按顺序嵌入,即k v v +=';(3)得到的由像素值v '组成的图像就是嵌入秘密信息后的图像。同时p、z以密钥的形式保存。 提取步骤: (1)读取密钥,得到p、z的值。 (2)遍历图像的每个像素,当像素v=p时,提取信息0并保持数据不变;当v=p+1时,提取信息1并将数据减1。 (3)当v压缩感知简介
数字内容安全原理与应用复习资料
压缩感知的重构算法
数字水印算法介绍