基于OpenCV的粒度分析方法
基于OpenCV的薄片粒度分析方法与应用
郭龙1陈金定1郭桂生2
1中海油能源发展采技服湛江实验中心
2 中石油新疆油田分公司开发公司
摘要:由于传统薄片鉴定方法人为因素干扰较大,数据重复性差,利用彩色图像摄像(CCD)系统处理薄片信息正受到人们越来越多的关注。彩色薄片图像分析系统中关键的是孔隙喉道识别技术、粒度分析技术。本文利用Intel公司的图形类库OpenCV尝试开发了一种新的利用分水岭颗粒识别算法和内连接去噪算法的颗粒粒度识别测量技术,在彩色碎屑岩薄片粒度图像分析上与主要的国产软件相比能更精确的识别颗粒并求取其粒度,为更精细准确的储层评价提供科学依据。
0引言
岩石薄片图像分析是利用CCD摄像设备将传统的薄片鉴定定量化的一种手段,它避免了传统薄片鉴定中数据重复性差的缺点。粒度统计是该分析中的一个重要部分,而粒度统计中最重要的是彩色图像分割技术。图像分割问题可以看作是颜色空间的分类问题[1-6]。目前研究者提出的分类方法大致有:Power等[7]的最大似然、决策树、K最近邻、神经元网络等方法。Hance等[8-10]比较了自适应阈值法、模糊C均值聚类、球坐标变换/中心分裂、主分量变换、分裂合并、多分辨率等6种边界识别算法,并提示自适应阈值法、主分量变换具有较高精确度和错判率。Ohlander等[9]提出了一种多维直方图阈值化方案。Guo等[10]对图像数据在多维特征空间的多峰概率密度函数采用基于直方图熵的分水岭算法。Kurugollu等[11]提出了一种多频谱图像分割方法。Lim等[12]把直方图阈值化和FCM相结合用于彩色图像分割。Michael等[13]在分析向量量化和聚类关系的基础上,以最小平方和作为准则实现分割。Cheng 等[14]提出了一种分层的分割方法,通过对同一性直方图进行阈值化操作来辨识同一个区域。Shafarenko等[15]通过对原图像进行形态“闭”运算来对“伪”谷底进行填充,以获得更有意义的局部极值点作为标记;Lezoray等[16]从贝叶斯分类器分类的结果中选取分水岭算法的种子。Prewitt[17]最早建议应该用模糊集合替代常规集合来表示图像分割结果。这些方法在石油工业实验室图像分析工作中大部分仍然处于研究性质,并未出现较成熟的标准方法,图像分析由于软件标准不统一给数据比对造成了一定困难。本文试图从上述图形学方法中找出最本质的边缘识别和去噪技术,用该技术实现标准识别软件,从而提供更好的薄片粒度图像分析方法。
1 方法研究
由于图像分析方法依赖于CCD摄像系统提供的二进制图像的计算机处理,我们选择Intel公司1999年为实现真实世界的实时视觉应用而开发的OpenCV函数库和32位C/C++编译系统(VS2005)作为软件开发平台。OpenCV是一个基于BSD许可证授权(开源)发行的跨平台计算机视觉库,可以运行在Linux、Windows和Mac OS操作系统上。[18]
1.1分水岭颗粒识别算法
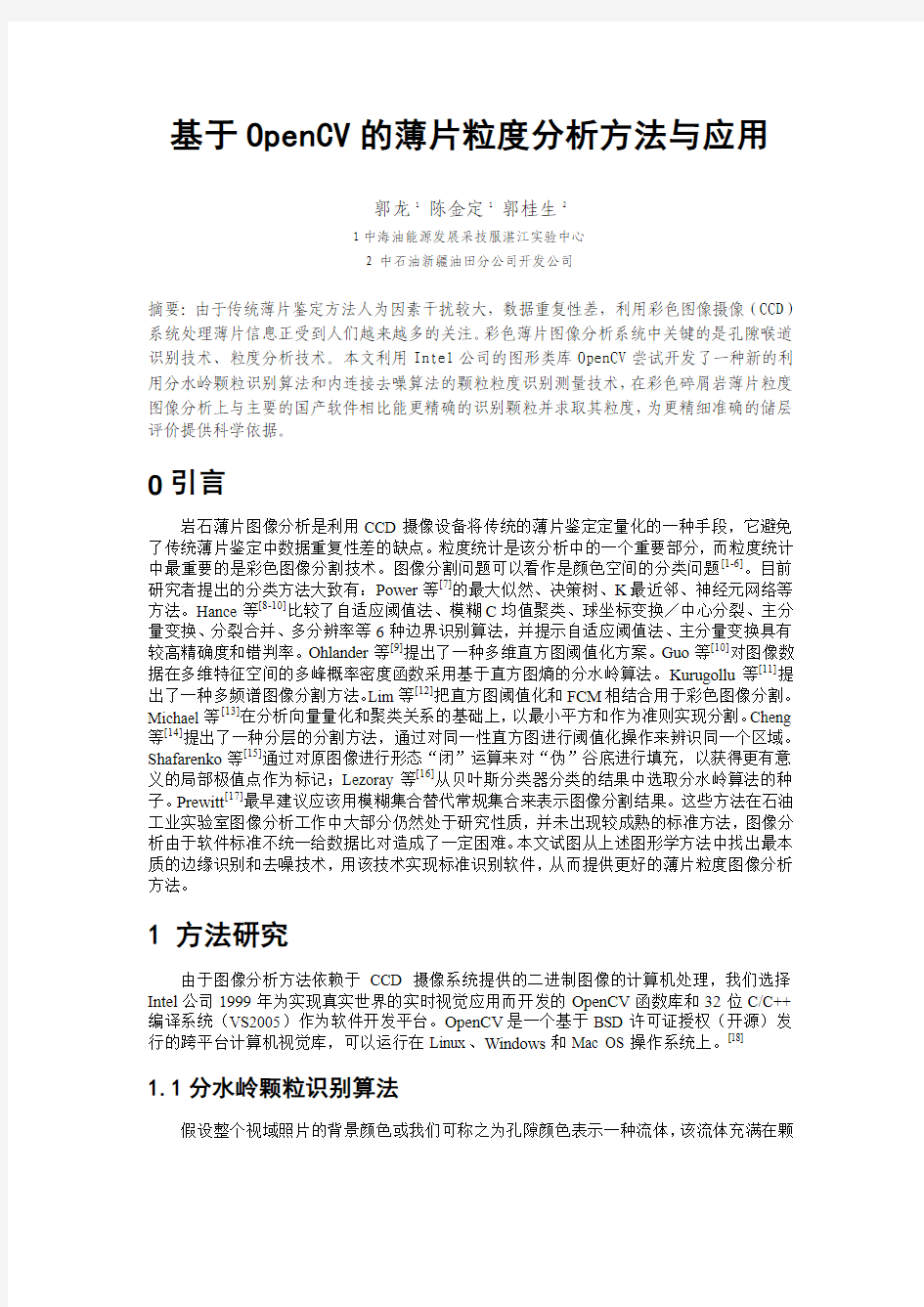
假设整个视域照片的背景颜色或我们可称之为孔隙颜色表示一种流体,该流体充满在颗
粒之间。这个视域可以被看作是地质学上的地形等高图,不同的颜色代表不同的海拔高度,越接近孔隙颜色的海拔越低。[15]在颜色空间中我们指定某一个海拔颜色为海平面,距离这种海拔颜色的欧氏距离被认为是海拔距离,如图1A 到图1B 将图片分割成为“海平面之下”和“海平面之上”两个部分。其中我们定义海平面以上的部分为颗粒,海平面以下的部分为孔隙,进而能将颗粒和孔隙区分开。想要对一个颗粒的长轴进行测量,下一步需要将两个邻
图1不同海拔高度的颗粒识别情况 1.2 颗粒边缘平滑分割
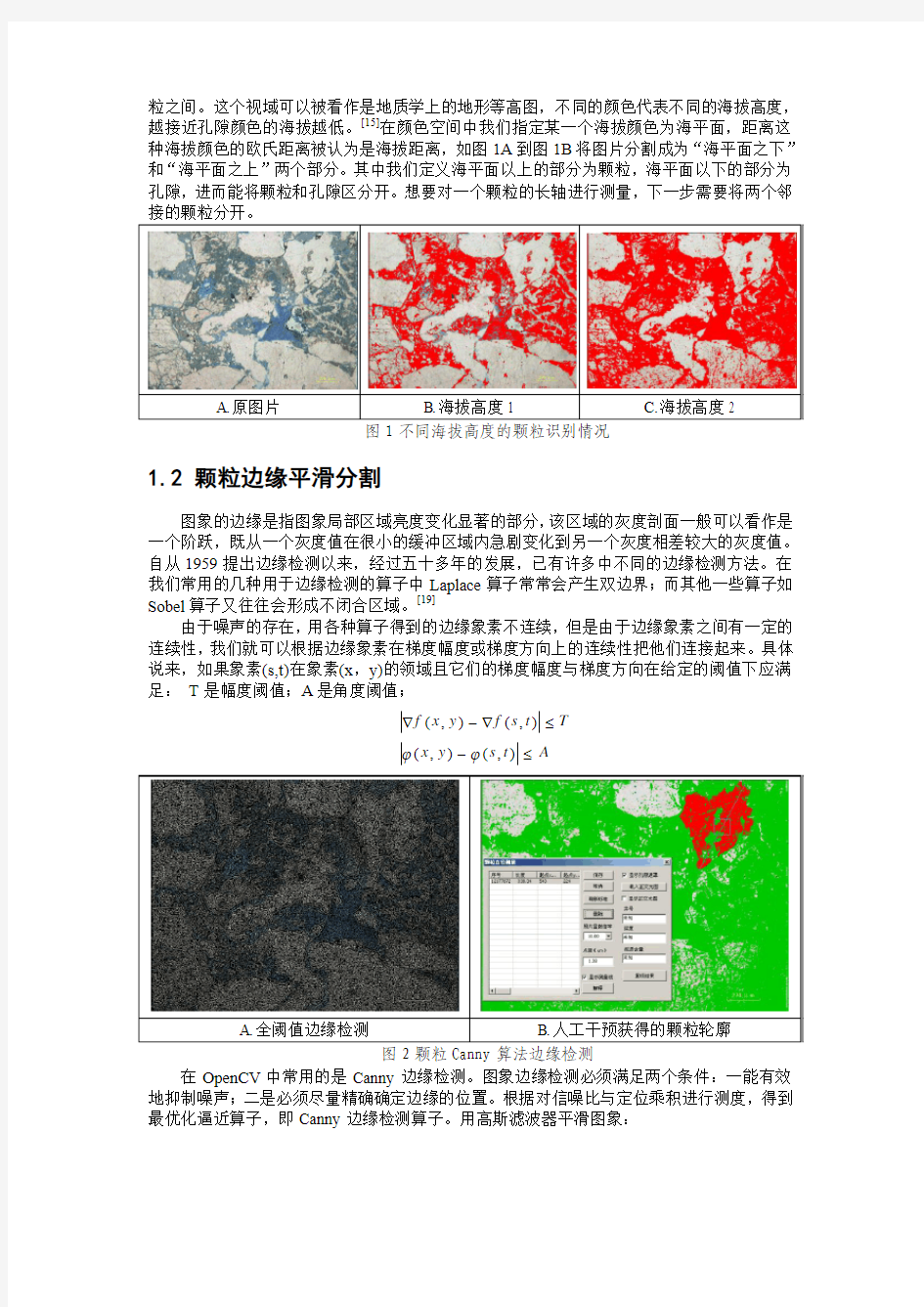
图象的边缘是指图象局部区域亮度变化显著的部分,该区域的灰度剖面一般可以看作是一个阶跃,既从一个灰度值在很小的缓冲区域内急剧变化到另一个灰度相差较大的灰度值。自从1959提出边缘检测以来,经过五十多年的发展,已有许多中不同的边缘检测方法。在我们常用的几种用于边缘检测的算子中Laplace 算子常常会产生双边界;而其他一些算子如
Sobel 算子又往往会形成不闭合区域。[19]
由于噪声的存在,用各种算子得到的边缘象素不连续,但是由于边缘象素之间有一定的连续性,我们就可以根据边缘象素在梯度幅度或梯度方向上的连续性把他们连接起来。具体说来,如果象素(s,t)在象素(x ,y)的领域且它们的梯度幅度与梯度方向在给定的阈值下应满足: T 是幅度阈值;A 是角度阈值;
A t s y x T
t s f y x f ≤-≤?-?
),(),(),(),(??
在OpenCV 中常用的是Canny 边缘检测。图象边缘检测必须满足两个条件:一能有效地抑制噪声;二是必须尽量精确确定边缘的位置。根据对信噪比与定位乘积进行测度,得到最优化逼近算子,即Canny 边缘检测算子。用高斯滤波器平滑图象:
)
,(*),(),(),(2222y x H y x f y x G e y x H b
a ==+-σ
用一阶偏导的有限差分来计算梯度的幅值和方向:
11111--=H 11112--=H
)/(tan ),()
,(*),(),()
,(*),(),(12122212211??θ?????-=+=
==n m y x H n m f n m y x H n m f n m
对梯度幅值进行非极大值抑制;用双阈值算法检测和连接边缘。利用该算法的全阈值图像如图2A 所示,得到该图像后利用手动干预可得到精确的颗粒边缘。但此时颗粒内部的噪点仍然影响颗粒直径和面积的测定。
1.3 颗粒内去噪
由于颗粒内一些部分被溶蚀风化或者在磨片时受到伤害核污染会导致一些细小的点状痕迹。这些痕迹并不能代表这个颗粒的原始状态,因此称其为噪音。要消除噪音必须给出一个判别方法,本文应用颗粒内部噪点的外接圆直径来判别该颗粒是否为噪点。为了检查去噪
内部连接算法首先从颗粒内部的一点出发,在4个方向上有限范围内寻找颗粒内空洞,如果找到测量在该方向上的所经过长度,若长度小于某一阈值T ,则将该空洞在该方向上填充为颗粒点。以此类推,遍历整个颗粒内点,即可将颗粒去噪。如图3A 所示,其中一点的
四个方向上经过颗粒和空洞,当空洞长度达不到一定阈值即会被消除即图3B。图3C、D显示在去噪之前图像中央部分高频成分较多,去噪之后可以明显看见中央区域高频成分(噪音点)减少较多,留下周围较多的低频分量。[20]
1.4 颗粒粒度测量
对Canny算法的得到的边缘上的每一个点遍历对另一个点求距离,将得到的最大距离保存为颗粒的粒径。
2 薄片图像粒度分析方法应用
应用上述方法对南海某井的铸体薄片单偏光图像进行分析,得到颗粒识别部分图像如图4A所示,我们用现有四川大学开发的另一套系统进行比对实验如图4B所示。图4中红色部分表示被识别出的颗粒,颗粒中间的反色线条代表该颗粒的长轴。从图4A和B两幅图的对比中可以明显看出中央部分的长条状长石颗粒被本文系统识别的很好,而仅仅基于颜色分割的川大的系统却无法识别这种颗粒。
图4 颗粒识别效果对比试验
遍历计算完每个颗粒的粒径后,即可在频率分布图中统计出每个粒级所对应的面积频率分布图和累计概率分布图。通过这两幅图(通常画在同一个图表中如图5所示)我们可以知道该样品的水动力条件历史以及沉积环境。图5中的结果的正确性已被生产实践所证明。
3.认识和结论
(1)利用Intel公司开源算法和图形图像处理库OpenCV编制了一套基于CCD摄像系统的薄片图像粒度分析程序,并用该程序对南海某井的铸体薄片图像进行处理,取得了较好的效果。
(2)本文首次联合了分水岭算法、Canny算法和颗粒内连接算法,并利用这些算法提高了程序对颗粒的识别能力。
(3)对比原有(四川大学研制)的薄片图像粒度分析程序,本文介绍的程序可得出更精确的分析结论。
参考文献:
[1]Lou X P,Tian J,Zhu G Y,eta1.A survey on image segmentation techniques[J].Pattern
Recognition and Artiifcial Intelligence,1999,12(3):300~312.
[2]Lin Y,Tian J.A suvrey on medical image segmentation methods[J]. Pattern Recongition and
Artiifcail Inteligence,2002,15(2):192~204.
[3]Cheng H D,Jiang X H,Sun Y,eta1.Color image segmentation:advances and
prospects[J].Pattern Recongition,2001,34(12):2259~2281.
[4]Ohta Y,Kanade T,Sakai T.Color information for region segmentation [J].Computer
Graphics and Image Processing,1980,13(3):222~241.
[5]Liu J Q,Y ang Y H.Muhiresolution color images segmentation [J].IEEE Transactions on
Pattern Analysis and Machine Inteligence,1994,16(7):689~700.
[6]Nevatia.A color edge detector and its use in scene segmentation [J].IEEE Transactionson
Systems,Manand Cybenretics,1977,7(11):820~826.
[7]Power W.Clist R.Comparison of supervised learning techniques applied to color
semgentation of fruit image[A].In:Proceeding of SPIE,Intelligent Roberts and ComputerVision.XV:Algorithms,Techniques,Active Vision,and Material Handing
[C].Boston,MA,USA,1996:370~381.
[8]Hance G A,Umbaugh SE,MossR H,eta1.Unsupervised color image segmentation with
application to skintunlor borders[J].IEEE Engineering in Medicine na d Biology.,1996,15(1):140~111.
[9]OhlanderR,Price K,Reddy D R.Picture semg entation using a recursive region splitting
method[J].Computer Graphics and Image Processing,1978,8(3):3l3~333.
[10]Guo G D,Y u S,Ma S D.Unsupevrised segmentation of colorimages A.In:Proceeding of
1998 IEEE Intemationla Cofnerenceon Image Processing[C].Chicago,IL,USA,1998:299~302.
[11]Kurugollu F,Sankur B,Harnmnei A E.Color imgae semgentation using histogram
multithresholding and fusion[J].Image and V ision Computing,2001,19(13):915~928.[12]Lim Y W,Lee S U.On the color image segmentation algoirthm based on the thresholding
and the fuzzyc-means techniques[J].Pattern Recongition,1990,23(9):935~952.[13]Michael T U,Arbib A.Color image semgentation using competitive learning[J].IEEE
Transactions on Pattern Analysis and Machine Intelligence,1994,16(12):1197~l206.[14]Cheng H D,Sun Y.A hierarchical apporach to color imgae semg entation using
homogeneity[J].IEEE Transactions on Imgae Processing,2000,9(12):207l~2082.[15]Shafarenko L,Petrou M,Kittler J.Automatic watesrhed segmentation of randomly textured
color imgaes[J].IEEE Trnasactions on Imgae Processing,1997,6(11):1530~154.
[16]Lezoray O,Cardot H.Cooperation of color pixel classification schemes and color watershed:
a study of rmicroscopic images[J].IEEE Trnasactions on Imgae Processing,2002,11(7):
783~789.
[17]Pal N R,Pla S K Aerviewonimagesemgentationtechniques[J].Pattern Recognition,1993,
26(9):1277~1294.
[18]Intel,Open Source Computer V ision Library Reference Manual [M].2001,1-111
[19]Pratt W K.Digital Image Processing[M].New Y ork:Wiley,1991.1-43
[20]徐建华.图像处理与分析[M].北京:科学出版社,1992.
粉末粒度分析方法
粉末粒度分析方法 0背景介绍 粉末粒度作为粉末性能一个最重要的方面,对粉末冶金材料性能及其制备有着密切的关系,粉末粒度的测定是粉末冶金生产中检验粉末质量以及调节和控制工艺过程的重要依据。粉末颗粒形状的复杂性和粒度范围的扩大,特别是超细粉末的应用使得准确而方便的的定粒度变得很困难。 1粉末粒度与粒度分布 1.1粒度和粒度组成 粉末粒度也称颗粒粒度,指颗粒占据空间的尺度,通常用mm或um表示。对于一个球形颗粒,粒度是单一的参数:直径D。然而,随之颗粒形状的复杂,近使用一个参数是不能表示粉末颗粒的尺寸,需要的粒度参数也增加。对于以个形状不规则的颗粒,粉末尺寸可以用投影高度H(任意)、最大长度M、水平宽度W、相等体积球的直径或具有相等表面积球的直径D来表达。这些表示颗粒粒径的方法称为等效粒径。表1为用不同等效粒径来表示某一不规则粉末颗粒的粒度。 由于组成粉末的无数颗粒一般粒径不同,故又用具有不同粒径的颗粒占全部粉末的百分含量表示粉末的粒度组成,又称粒度分布。但是通常所说的粉末粒度包含粉末平均粒度的意义,也就是粉末的某种统计性平均粒径。 1.2粒度基准 用长、宽、高三维尺寸的某种平均值来度量,称为几何学粒径。由于测量颗粒的几何尺寸非常麻烦,计算几何学平均径也较繁琐,因此又有通过测定粉末的沉降速度、比表面积、光波衍射或散射等性质,而用当量或名义直径表示粒度的
方法。可以采用下面四种粒径基准。 1)几何学粒径d g:用显微镜按投影几何学原理测得的粒径称投影径。 2)当量粒径d c:利用沉降法、离心法或水力学方法(风筛法、水簸法)测得的粉末粒度,称为当量粒径。当量粒径中有一种斯托克斯径,其物理意义是与被测粉末具有相同沉降速度且服从斯托克斯定律的同质球形粒子的直径。由于粉末的实际沉降速度还受颗粒形状和表面状态的影响,故形状复杂、表面粗糙的粉末,其斯托克斯径总是比按体积计算的几何学名义径小。 3)比表面积粒径d sP:利用吸附法、透过法和润湿热法测定粉末的比表面,再换算成具有相同比表面值的均匀球形颗粒的直径,称为比表面积径, d sP=6S v。 4)衍射粒径d sc:对于粒度接近电磁波波长的粉末,基于光与电磁波(如X光等)的衍射现象所测得的粒径称为衍射粒径。 1.3粒度分布基准 粉末粒度组成是指不同粒径的颗粒在粉末总量中所占的百分数,可以用某种统计分布曲线或统计分布函数描述。粒度的统计分布可以选择四种不同的基准,实际应用的是频度分布和质量基准分布。 1)个数基准分布:以每一粒径间隔内的颗粒数占全部颗粒总数∑n的百分数表示,又称频度分布。 2)长度基准分布:以每一粒径间隔内的颗粒总长度占全部颗粒的长度总和∑nD的百分数表示。 3)面积基准分布:以每一粒径间隔内的颗粒总表面积占全部颗粒的表面积总和∑nD2的百分数表示。 4)质量基准分布:以每一粒径间隔内的颗粒总质量占全部颗粒的质量总和∑nD3的百分数表示。 表2是某一种粉末的粒度的频度分布统计表,如果用各粒级的频度f i(%)除以该粒级的间隔Δu(表2中为1um),则得到相对相对频度,单位是%/um。以相对频度对平均粒径作图得到图2,为相对频度分布曲线。表2中累计百分数代表包括某一粒级在内的小于该粒级的颗粒的百分含量,对平均粒径作图得到图2负累计分布曲线。累计分布曲线上对应50%的粒径称中位径。该曲线斜率最大的
残留溶剂顶空分析报告方法验证方案设计模版2
方案批准 注:在方案批准部分签字表明签字者同意方案中规定的检测项目检测方法和记录要求。在执行本方案的过程中可能会出现影响严格执行本方案的偏差,对较小的偏差将通过偏差报告的形式来解决,对于关键性偏差,如对方法的调整、对参数或接受标准的调整必须制定出增补方案并按照原方案批准程序得到批准才能进行。所有的偏差报告和增补方案必须在提交验证报告供批准时一同提交。
目录 1.概述 (3) 2.参考资料 (4) 3. 职责 (4) 4. 色谱系统及色谱条件 (4) 5. 器材与试剂 (5) 6. 验证试验 (5) 6.1系统适应性 (5) 6.2专属性 (6) 6.3耐用性 (7) 6.4定量限 (8) 6.5检测限 (8) 6.6线性与围 (8) 6.7准确度 (9) 6.8精密度 (11) 7.再验证周期 (12) 8.偏差及纠正措施 (13) 9.最终审核和批准 (13) 药品残留溶剂顶空分析方法草案 (14)
1.概述 1.1根据ICH对药品中残留溶剂含量的要求及盐酸噻氯匹定生产工艺,必须控制盐酸噻氯匹定生产工艺中使用到的溶剂乙醇、丁酮、甲苯、N,N-二甲基甲酰胺(DMF)的残留量。限度分别为:乙醇≤5000ppm、丁酮≤5000ppm、甲苯≤890ppm、DMF≤880ppm。 1.2分析方法草案见附件。 1.3本分析方法属于杂质定量分析,因此需要验证的项目有:系统适应性、专属性、线性、 准确度、检测限、定量限、精密度、耐用性,具体参数及接受标准要求见下表:
2.参考资料 ICH Q3C (R3), November 2005. ICH Q2 (R1), November 2005. <467> Residual Solvents, United States Pharmacopoeia 31, November 2007. <20424> Residual Solvents, European Pharmacopoeia 6.0, June 2007. 3. 职责 4.1色谱系统
粒度分析的基础知识
什么叫颗粒? 颗粒其实就是微小的物体,是组成粉体的能独立存在的基本单元。这个问题似乎很简单,但是要真正了解各种粒度测试技术所得出的测试结果,明确颗粒的定义又是十分重要的。各种颗粒的复杂形状使得粒度分析比原本想象的要复杂得多。 粒度测试复杂的原因 比如,我们用一把直尺量一个火柴盒的尺寸,你可以回答说这个火柴盒的尺寸是 20×10×5mm。但你不能说这个火柴盒是20mm或10mm或5mm,因为这些只是它大小尺寸的一部分。可见,用单一的数值去描述一个三维的火柴盒的大小是不可能的。同样,对于一粒砂子或其它颗粒,由于其形状极其复杂,要描述他们的大小就更为困难了。比如对一个质保经理来说,想用一个数值来描述产品颗粒的大小及其变化情况,那么他就需要了解粉体经过一个处理过程后平均粒度是增大了还是减小了,了解这些有助于正确进行粒度测试工作。那么,怎样仅用一个数值描述一个三维颗粒的大小?这是粒度测试所面临的基本问题。等效球体 只有一种形状的颗粒可以用一个数值来描述它的大小,那就是球型颗粒。如果我们说有一个50μ的球体,仅此就可以确切地知道它的大小了。但对于其它形状的物体甚至立方体来说,就不能这样说了。对立方体来说,50μ可能仅指该立方体的一个边长度。对复杂形状的物体,也有很多特性可用一个数值来表示。如重量、体积、表面积等,这些都是表示一个物体大小的唯一的数值。如果我们有一种方法可测得火柴盒重量的话,我们就可以公式(1)把这一重量转化为一球体的重量。 重量= 4/3π×r3×ρ-------------------------------- (1) 由公式(1)可以计算出一个唯一的数(2r)作为与火柴盒等重的球体的直径,用这个直径来代表火柴盒的大小,这就是等效球体理论。也就是说,我们测量出粒子的某种特性并根据这种特性转换成相应的球体,就可以用一个唯一的数字(球体的直径)来描述该粒子的大小了。这使我们无须用三个或更多的数值去描述一个三维粒子的大小,尽管这种描述虽然较为准确,但对于达到一些管理的目的而言是不方便的。我们可以看到用等效法描述描述粒子的大小会产生了一些有趣的结果,就是结果依赖于物体的形状,见图2中圆柱的等效球体。如果此圆柱改变形状或大小,则体积/重量将发生变化,我们至少可以根据等效球体模型来判断出此圆柱是变大了还是变小了等。 假设有一直径D1=20μm(半径r=10μm),高为100μm的圆柱体。由此存在一个与该圆柱体积相等球体的直径D2。我们可以这样计算这一直径(D2):
图像处理opencv代码
#include "stdafx.h" #include "mymfc.h" #include "mymfcDlg.h" #include "afxdialogex.h" #include
CmymfcDlg::CmymfcDlg(CWnd* pParent /*=NULL*/) : CDialogEx(CmymfcDlg::IDD, pParent) , TheImage(NULL) , rePath(_T("")) { m_hIcon = AfxGetApp()->LoadIcon(IDR_MAINFRAME); } void CmymfcDlg::DoDataExchange(CDataExchange* pDX) { CDialogEx::DoDataExchange(pDX); } BEGIN_MESSAGE_MAP(CmymfcDlg, CDialogEx) ON_WM_SYSCOMMAND() ON_WM_PAINT() ON_WM_QUERYDRAGICON() ON_BN_CLICKED(IDC_ReadImg, &CmymfcDlg::OnBnClickedReadimg) ON_BN_CLICKED(IDC_EdgeDetect, &CmymfcDlg::OnBnClickedEdgedetect) ON_BN_CLICKED(IDC_Refresh, &CmymfcDlg::OnBnClickedRefresh) ON_BN_CLICKED(IDC_GrayProcess, &CmymfcDlg::OnBnClickedGrayprocess) ON_BN_CLICKED(IDC_Sobel, &CmymfcDlg::OnBnClickedSobel) ON_BN_CLICKED(IDC_Laplace, &CmymfcDlg::OnBnClickedLaplace) ON_BN_CLICKED(IDC_FFT2, &CmymfcDlg::OnBnClickedFft2) ON_BN_CLICKED(IDC_CImage, &CmymfcDlg::OnBnClickedCimage) ON_BN_CLICKED(IDC_Mirror, &CmymfcDlg::OnBnClickedMirror) ON_BN_CLICKED(IDC_CColor, &CmymfcDlg::OnBnClickedCcolor) ON_BN_CLICKED(IDC_MedianBlur, &CmymfcDlg::OnBnClickedMedianblur) ON_BN_CLICKED(IDC_Gaussian, &CmymfcDlg::OnBnClickedGaussian) ON_BN_CLICKED(IDC_BothSide, &CmymfcDlg::OnBnClickedBothside) ON_BN_CLICKED(IDC_Equally, &CmymfcDlg::OnBnClickedEqually) ON_BN_CLICKED(IDC_Corrosion, &CmymfcDlg::OnBnClickedCorrosion) ON_BN_CLICKED(IDC_Dilate, &CmymfcDlg::OnBnClickedDilate) END_MESSAGE_MAP() // CmymfcDlg 消息处理程序 BOOL CmymfcDlg::OnInitDialog() { CDialogEx::OnInitDialog();
usp 36 786 分析筛分法评估粒度分布
786分析筛分法评估粒度分布 筛分法是按粒子大小分布将粉末和颗粒分类的最古老的方法之一。通过使用编织筛布基本将颗粒按中等大小尺寸(如广度或宽度)进行排序。当大部分颗粒大于75 μm时,机械筛分则最合适。对更小的颗粒,筛分时由于重量轻不足以克服颗粒表面间的凝聚力和粘附力,导致颗粒间互相粘结留在筛上,因而导致颗粒可能通过筛子得到保留。对这样的材料,其它搅动方式如喷气筛分或声波筛分可能更合适。然而筛分法有时也用于一些平均颗粒尺寸小于75μm的粉末或颗粒此时方法需进行验证。在制药学上筛分法通常是作为将更粗糙的单粉或颗粒分类的选择。对于仅以粒子大小为基础进行分类的粉末来说筛分法是绝好的方法而且在大多数情况下分析能在干燥状态下进行。 筛分法的局限性是它需要一定重量的样粉(通常为至少25g,取决于粉末或颗粒的密度,和试验筛的直径),以及它对筛分容易堵塞滤网小孔的油性或其它粘性粉末存在困难。筛分法本质上是一种两维大小估计因为能否通过滤网小孔更多地取决于最大宽度与厚度而非长度。 此方法用来估计单一物料的总体粒子大小分布。它并不是用来测定粒子通过或未通过一个或两个滤网的比例。 除非在单独的专论里另有说明估计粒子大小分布在干燥筛分法里作了描述。它的困难在于难以到达终点比(如物料不容易通过滤网)或者有时需要使用筛分范围更细的粉末(小于75μm)使用备选颗粒大小方法时应慎重考虑。
在不会导致测试样品获得或失去水分的情况下应该实施筛分法测试。其中,筛分时环境的相对湿度应进行控制,以防止样品水分的吸收或损失。在没有对立证据情况下,筛分试验通常在环境湿度下执行。适用于某一特定材料的任何特殊条件在专论中应加以详尽描述。 分析筛分法原理——分析测试滤网由一个金属筛网构成编织简单上有方形小孔并被封入一个无盖圆柱形容器底部。基本分析法要求滤网按越来越粗糙的程度逐个叠加然后将测试粉末置于最上层滤网上。 这套滤网受一个标准搅拌周期控制留在每个滤网上的物料重量被准确测定。测试给出了每个滤网粒度范围的粉末重量百分比。 此估计制药单粉粒子大小分布的筛分过程通常用来筛分至少80%颗粒大于75μm的粉末。分析筛分法中测定粒子大小分布的粒度参数为通过粒子的最小方形小孔的边长。 测试滤网 适宜药用测试的测试滤网应符合最新版国际标准规范组织ISO3310-1的要求测试滤网——技术要求与测试(见表1)。除非在专论里另有说明,使用那些在表1中列出主要大小的ISO筛子。除非在专论里另有说明,使用那些在表1中特定区域推荐的ISO筛子。 表1 影响范围内系列标准滤网大小
“颗粒粒径分析方法”汇总大全
“颗粒粒径分析方法”汇总大全 来源:材料人2016-08-05 一、相关概念: 1、粒度与粒径:颗粒的大小称为粒度,一般颗粒的大小又以直径表示,故也称为粒径。 2、粒度分布:用一定方法反映出一系列不同粒径区间颗粒分别占试样总量的百分比称为粒度分布。 3、等效粒径:由于实际颗粒的形状通常为非球形的,难以直接用直径表示其大小,因此在颗粒粒度测试领域,对非球形颗粒,通常以等效粒径(一般简称粒径)来表征颗粒的粒径。等效粒径是指当一个颗粒的某一物理特性与同质球形颗粒相同或相近时,就用该球形颗粒的直径代表这个实际颗粒的直径。其中,根据不同的原理,等效粒径又分为以下几类:等效体积径、等效筛分径、等效沉速径、等效投影面积径。需注意的是基于不同物理原理的各种测试方法,对等效粒径的定义不同,因此各种测试方法得到的测量结果之间无直接的对比性。 4、颗粒大小分级习惯术语:纳米颗粒(1-100 nm),亚微米颗粒(0.1-1 μm),微粒、微粉(1-100 μm),细粒、细粉(100-1000 μm),粗粒(大于1 mm)。 5、平均径:表示颗粒平均大小的数据。根据不同的仪器所测量的粒度分布,平均粒径分、体积平均径、面积平均径、长度平均径、数量平均径等。 6、D50:也叫中位径或中值粒径,这是一个表示粒度大小的典型值,该值准确地将总体划分为二等份,也就是说有50%的颗粒超过此值,有50%的颗粒低于此值。如果一个样品的D50=5 μm,说明在组成该样品的所有粒径的颗粒中,大于5 μm的颗粒占50%,小于5 μm的颗粒也占50%。 7、最频粒径:是频率分布曲线的最高点对应的粒径值。 8、D97:D97指一个样品的累计粒度分布数达到97%时所对应的粒径。它的物理意义是粒径小于它的的颗粒占97%。这是一个被广泛应用的表示粉体粗端粒度指标的数据。 二、粒度测试的基本方法及其分析 激光法 激光法是通过一台激光散射的方法来测量悬浮液,乳液和粉末样品颗粒分布的多用途仪器。纳米型和微米型激光料度仪还可以通过安装的软件来分析颗粒的形状。现在已经成为颗粒测试的主流。 1、优点:(1)适用性广,既可测粉末状的颗粒,也可测悬浮液和乳浊液中的颗粒;(2)测试范围宽,国际标准ISO 13320 - 1 Particle Size Analysis 2 Laser Diffraction Meth 2 ods 2 Part 1: General Principles中规定激光衍射散射法的应用范围为0.1~3000 μm;(3)准确性高,重复性好;(4)测试速度快;(5)可进行在线测量。 2、缺点:不宜测量粒度分布很窄的样品,分辨率相对较低。 激光散射技术分类: 1、静态光散射法(即时间平均散射):测量散射光的空间分布规律采用米氏理论。测试的有效下限只能达到50纳米,对于更小的颗粒则无能为力。纳米颗粒测试必须采用“动态光散射”技术。 2、动态光散射法:研究散射光在某固定空间位置的强度随度时间变化的规律。原理基于ISO 13321分析颗粒粒度标准方法,即利用运动着的颗粒所产生的动态的散射光,通过光子相关光谱分析法分析PCS颗粒粒径。 按仪器接受的散射信号可以分为衍射法、角散射法、全散射法、光子相关光谱法,光子交叉相关光谱法(PCCS)等。其中以激光为光源的激光衍射散射式粒度仪(习惯上简称此类仪器为激光粒度仪)发展最为成熟,在颗粒测量技术中已经得到了普遍的采用。 激光粒度分析仪:
opencv函数目录-Cv图像处理
目录 1 梯度、边缘和角点 1.1 Sobel 1.2 Laplace 1.3 Canny 1.4 PreCornerDetect 1.5 CornerEigenValsAndVecs 1.6 CornerMinEigenVal 1.7 CornerHarris 1.8 FindCornerSubPix 1.9 GoodFeaturesToTrack 2 采样、插值和几何变换 2.1 InitLineIterator 2.2 SampleLine 2.3 GetRectSubPix 2.4 GetQuadrangleSubPix 2.5 Resize 2.6 WarpAffine 2.7 GetAffineTransform 2.8 2DRotationMatrix 2.9 WarpPerspective 2.10 WarpPerspectiveQMatrix 2.11 GetPerspectiveTransform 2.12 Remap 2.13 LogPolar 3 形态学操作 3.1 CreateStructuringElementEx 3.2 ReleaseStructuringElement 3.3 Erode 3.4 Dilate 3.5 MorphologyEx 4 滤波器与色彩空间变换 4.1 Smooth 4.2 Filter2D 4.3 CopyMakeBorder 4.4 Integral 4.5 CvtColor 4.6 Threshold 4.7 AdaptiveThreshold 5 金字塔及其应用 5.1 PyrDown 5.2 PyrUp 6 连接部件 6.1 CvConnectedComp
粉末材料粒度测定
粉末材料粒度测定是一个很复杂的问题,因为粒度的定义本身就不确定,没有那一本书能给出粒度的权威概念,这是因为对于一个球形的颗粒,我们可以用其直径来表示其大小,对一个立方体,我们可以用其棱长来表示其大小,对一个圆锥体,我们可以用其底面直径和其高两个尺寸来表示其大小,对长方体,就得用其长、宽、高三个尺寸来表示其大小。对一个任意形状的颗粒就很难表征其大小。一般都采用一个与该颗粒具有某种等效效应的颗粒的直径来表示该不规则颗粒的粒径大小。ISO国际标准化组织也是以下标表示粒度划分的基准,比如下标是1表示以长度为基准(或者是为权重)来划分例,如以机械力为驱动力的筛分析,以2来表示以面积为基准来划分,比如各种沉降的方法,BET法等等,以3来表示以等效体积球或者是等效质量的球为基准来划分,ISO国际组织还有一个在几种方法之间进行转化的讨论,但是这种划分本身就是无奈之举,因为不同的划分依据本身就是混乱的,现实中的颗粒基本都是不规则的,对于一个外形不规则颗粒的描述最详尽的办法就是三维尺度的描述,但是对于一个颗粒体系来说三维尺度的描述是不可能办到的,而且颗粒外形一般都不是有规律的。 对于同一样品不同次数的取样,结果也不一样,这就造成了各种测试方法之间的结果不能彼此很好的一一对应,经常听见颗粒测试仪器厂家之间为此的彼此攻击和谩骂,甚至于同一测试方法的不同厂家之间也是如此互相攻击。所以颗粒体系的测量应该是基于统计学理论,以样本为依据,对真实情况进行逼近,目前以各种手段想得到一个粉末体系的真实粒度分布是不可能的。 纳米粉末的粒度分布的测定来说,有很多种方法。举例来说, 1结合图像分析仪的扫描电镜或者是透射电镜, 2光子相关谱法(动态激光散射法), 3X射线小角散射法(文中包括同步辐射为光源的SA XS和中子小角散射法) 4离心沉降法,X射线离心沉降法, 5比表面积法(BET), 6拉曼(Raman)散射法, 7 探针扫描显微镜, 8X射线衍射峰宽化法(谢乐公式)。 这里先要澄清一个概念,对于金属材料或者是陶瓷材料来说,颗粒度是一个比晶粒度大的概念,一般来说,一个颗粒里面可能包含几个晶粒,而一个晶粒一般要小于等于所在颗粒的尺寸。由于X射线衍射线线宽化法(谢乐公式)是晶粒度的测量,不是本文要讨论的颗粒度,所以不与详细讨论。目前只有磁流体的是一个晶粒基本就是一个颗粒,磁流体依据谢乐公式的晶粒度测量可以是说明了其颗粒度的大小的,目前未听说其它材料也是这种情况。 https://www.360docs.net/doc/dc7455547.html,/A-sdjcxy200503006.html http://w https://www.360docs.net/doc/dc7455547.html,/article/a rticle.php/10589 https://www.360docs.net/doc/dc7455547.html,/v iew/950063.html http://w https://www.360docs.net/doc/dc7455547.html,/?v iew thread-21070.html 1. 透射电镜和扫描电镜是一种很经典,很传统的做法,具有直观、可靠的绝对尺度测定,原先一般认为透射电镜的分辨率高于扫描电镜,但现在好的扫描电镜分辨率也是很高,也可以达到10nm以下的。对于纳米颗粒,透射电镜可以观察其大小、形状,还可以根据像的衬度来估计颗粒的厚度,透射电子显微镜或者是扫描电子显微镜结合图像分析法还可以选择地进行观测和统计,分门别类给出粒度分布。如果将颗粒进行包埋、镶嵌和切片减薄制样,还可以对颗粒内部的微观结构作进一步地分析。比如北科大的方克明老师就发现一些碳纳米管的内部其实是碳纳米棒,但是这与操作人员的制样水平很有关系。当对于所检测的样品清晰成像后,还有一个测量和统计的问题。一种作法是选取足够多的视场进行照相,获得数百乃至数千个颗粒的电镜照片,再将每张照片经扫描进入图象分析仪进行分析统计。按标准刻度计算颗粒的等效投影面积直径,同时统计落在各个粒度区间的颗粒个数。然后计算出以个数为基准的粒度组成、平均粒度、分布方差等,并可输出相应的直方分布图。在应用软件中还包括个数分布向体积分布转换的功能,往往将这两种分布及相关的直方图和统计平均值等都出来。该方法的优点是直观,而且可以得到颗粒形状信息,缺点是要求颗粒要处于良好的分散状态,另外,由于用显微镜观测时所需试样量非常少,所以对试样的代表性要求严格。因此取样和制样的方法必须规范;而且要对大量的颗粒的粒径进行统计才能得到粒度分布值或平均粒径。 http://w ww.bjy https://www.360docs.net/doc/dc7455547.html,/jcxx/dx/200244.shtml http://w ww.hbh-ky https://www.360docs.net/doc/dc7455547.html,/instrume ... rumentID=0000000898 http://comm.dangda https://www.360docs.net/doc/dc7455547.html,/rev iew/782180.html 2光子相关谱法(动态激光散射法)是目前最为主要的纳米材料体系粒度分析方法,主要测量微粒在液体中的扩散系数来测定颗粒尺
(完整word版)方法验证试验的一般内容及要求
方法验证试验的一般内容及要求---青岛科标检测 方法验证一般要求: 1.标准编制组应编制方法验证方案,根据影响方法的精密度和准确度的主要因素和数理统计学的要求,选择合适的实验室、样品类型、含量水平、分析人员、分析设备、分析时间等内容。 2.标准编制组除可以使用有证标准物质/标准样品外,还应提供实际样品进行方法验证,实际样品应尽量覆盖方法标准的适用范围。 3.在方法验证前,参加验证的操作人员应熟悉和掌握方法原理、操作步骤及流程,必要时应接受培训。 4.方法验证过程中所用的试剂和材料、仪器和设备及分析步骤应符合方法相关要求。 5.参加验证的操作人员及标准编制组应按照要求如实填写《方法验证报告》中的“原始测试数据表”,若有必要,应附上与该原始测试数据表内容相符的图谱或其他由仪器产生的记录打印条等。 6.标准编制组根据方法验证数据及统计、分析、评估结果,最终形成《方法验证报告》。 具体要求 1.检出限的验证 确定检出限,按方法操作步骤及流程进行分析操作,计算结果的平均值、标准偏差、相对标准偏差、检出限等各项参数。最终的方法检出限为各验证实验室所得数据的最高值。 2.精密度的验证
有证标准物质/标准样品的测定:采用高、中、低3 种不同含量水平(应包括一个在测定下限附近的浓度或含量)的统一样品,每个样品平行测定6 次以上,分别计算不同浓度或含量样品的平均值、标准偏差、相对标准偏差等各项参数。实际样品的测定:各验证实验室应对1 ~3 个含量水平的同类型样品进行分析测试,按每个样品平行测定6 次以上,分别计算不同样品的平均值、标准偏差、相对标准偏差等 各项参数。 对各验证实验室的数据进行汇总统计分析,计算实验室间相对标准偏差、重复性限r 和再现性限R。 3.准确度的验证 若各验证实验室使用有证标准物质/标准样品进行分析测定确定准确度,则需对1 ~3个不同含量水平的有证标准物质/标准样品进行测定,按全程序每个有证标准物质/标准样品平行测定6 次以上,分别计算不同浓度或含量水平有证标准物质/标准样品的平均值、标准偏差、相对误差等各项参数。 若实验室对实际样品进行加标分析测定确定准确度,则需对每个样品类型的1 ~3 个不同含量水平的统一样品中分别加入一定量的有证标准物质/标准样品进行测定, 每个加标样品平行测定6 次以上,分别计算每个统一样品的加标回收率。 对各验证实验室的数据进行汇总统计分析,计算其相对误差或加标回收率的均值及变动范围。
粒度分析的基本原理
粒度分析的基本原理 (作者:Malvern 仪器有限公司Alan Rawle 博士,翻译:焉志东,整理:董青云) 什么叫颗粒? 颗粒其实就是微小的物体,是组成粉体的能独立存在的基本单元。这个问题似乎很简单,但是要真正了解各种粒度测试技术所得出的测试结果,明确颗粒的定义又是十分重要的。各种颗粒的复杂形状使得粒度分析比原本想象的要复杂得多。 (见图1略) 粒度测试复杂的原因 比如,我们用一把直尺量一个火柴盒的尺寸,你可以回答说这个火柴盒的尺寸是20×10×5mm 。但你不能说这个火柴盒是20mm 或10mm 或5mm ,因为这些只是它大小尺寸的一部分。可见,用单一的数值去描述一个三维的火柴盒的大小是不可能的。同样,对于一粒砂子或其它颗粒,由于其形状极其复杂,要描述他们的大小就更为困难了。比如对一个质保经理来说,想用一个数值来描述产品颗粒的大小及其变化情况,那么他就需要了解粉体经过一个处理过程后平均粒度是增大了还是减小了,了解这些有助于正确进行粒度测试工作。那么,怎样仅用一个数值描述一个三维颗粒的大小?这是粒度测试所面临的基本问题。 等效球体 只有一种形状的颗粒可以用一个数值来描述它的大小,那就是球型颗粒。如果我们说有一个50 u 的球体,仅此就可以确切地知道它的大小了。但对于其它形状的物体甚至立方体来说,就不能这样说了。对立方体来说,50u 可能仅指该立方体的一个边长度。对复杂形状的物体,也有很多特性可用一个数值来表示。如重量、体积、表面积等,这些都是表示一个物体大小的唯一的数值。如果我们有一种方法可测得火柴盒重量的话,我们就可以公式(1)把这一重量转化为一球体的重量。 重量= )1(r 3 4 3-----------------------ρ??π 由公式(1)可以计算出一个唯一的数(2r )作为与火柴盒等重的球体的直径,用这个直径来代表火柴盒的大小,这就是等效球体理论。也就是说,我们测量出粒子的某种特性并根据这种特性转换成相应的球体,就可以用一个唯一的数字(球体的直径)来描述该粒子的大小了。这使我们无须用三个或更多的数值去描述一个三维粒子的大小,尽管这种描述虽然较为准确,但对于达到一些管理的目的而言是不方便的。我们可以看到用等效法描述描述粒子的大小会产生了一些有趣的结果,就是结果依赖于物体的形状,见图2中圆柱的等效球体。如果此圆柱改变形状或大小,则体积/重量将发生变化,我们至少可以根据等效球体模型来判断出此圆柱是变大了还是变小了等等。如图2(略)。 假设有一直径D1=20um (半径r=10um ),高为100 um 的圆柱体。由此存在一个与该圆柱体积相等球体的直径D2。我们可以这样计算这一直径(D2): 圆柱体积V 1=)2()m (10000h r 3 2 ----------------μπ=??π
图像管理方案计划opencv代码
/. #include "stdafx.h" #include "mymfc.h" #include "mymfcDlg.h" #include "afxdialogex.h" #include
CmymfcDlg::CmymfcDlg(CWnd* pParent /*=NULL*/) : CDialogEx(CmymfcDlg::IDD, pParent) , TheImage(NULL) , rePath(_T("")) { m_hIcon = AfxGetApp()->LoadIcon(IDR_MAINFRAME); } void CmymfcDlg::DoDataExchange(CDataExchange* pDX) { CDialogEx::DoDataExchange(pDX); } BEGIN_MESSAGE_MAP(CmymfcDlg, CDialogEx) ON_WM_SYSCOMMAND() ON_WM_PAINT() ON_WM_QUERYDRAGICON() ON_BN_CLICKED(IDC_ReadImg, &CmymfcDlg::OnBnClickedReadimg) ON_BN_CLICKED(IDC_EdgeDetect, &CmymfcDlg::OnBnClickedEdgedetect) ON_BN_CLICKED(IDC_Refresh, &CmymfcDlg::OnBnClickedRefresh) ON_BN_CLICKED(IDC_GrayProcess, &CmymfcDlg::OnBnClickedGrayprocess) ON_BN_CLICKED(IDC_Sobel, &CmymfcDlg::OnBnClickedSobel) ON_BN_CLICKED(IDC_Laplace, &CmymfcDlg::OnBnClickedLaplace) ON_BN_CLICKED(IDC_FFT2, &CmymfcDlg::OnBnClickedFft2) ON_BN_CLICKED(IDC_CImage, &CmymfcDlg::OnBnClickedCimage) ON_BN_CLICKED(IDC_Mirror, &CmymfcDlg::OnBnClickedMirror) ON_BN_CLICKED(IDC_CColor, &CmymfcDlg::OnBnClickedCcolor) ON_BN_CLICKED(IDC_MedianBlur, &CmymfcDlg::OnBnClickedMedianblur) ON_BN_CLICKED(IDC_Gaussian, &CmymfcDlg::OnBnClickedGaussian) ON_BN_CLICKED(IDC_BothSide, &CmymfcDlg::OnBnClickedBothside) ON_BN_CLICKED(IDC_Equally, &CmymfcDlg::OnBnClickedEqually) ON_BN_CLICKED(IDC_Corrosion, &CmymfcDlg::OnBnClickedCorrosion) ON_BN_CLICKED(IDC_Dilate, &CmymfcDlg::OnBnClickedDilate) END_MESSAGE_MAP() // CmymfcDlg 消息处理程序 BOOL CmymfcDlg::OnInitDialog() { CDialogEx::OnInitDialog();
材料测试分析方法(究极版)
绪论 3分析测试技术的发展的三个阶段? 阶段一:分析化学学科的建立;主要以化学分析为主的阶段。 阶段二:分析仪器开始快速发展的阶段 阶段三:分析测试技术在快速、高灵敏、实时、连续、智能、信息化等方面迅速发展的阶段4现代材料分析的内容及四大类材料分析方法? 表面和内部组织形貌。包括材料的外观形貌(如纳米线、断口、裂纹等)、晶粒大小与形态、各种相的尺寸与形态、含量与分布、界面(表面、相界、晶界)、位向关系(新相与母相、孪生相)、晶体缺陷(点缺陷、位错、层错)、夹杂物、内应力。 晶体的相结构。各种相的结构,即晶体结构类型和晶体常数,和相组成。 化学成分和价键(电子)结构。包括宏观和微区化学成份(不同相的成份、基体与析出相的成份)、同种元素的不同价键类型和化学环境。 有机物的分子结构和官能团。 形貌分析、物相分析、成分与价键分析与分子结构分析四大类方法 四大分析:1图像分析:光学显微分析(透射光反射光),电子(扫描,透射),隧道扫描,原子力2物象:x射线衍射,电子衍射,中子衍射3化学4分子结构:红外,拉曼,荧光,核磁 获取物质的组成含量结构形态形貌及变化过程的技术 材料结构与性能的表征包括材料性能,微观性能,成分的测试与表征 6.现代材料测试技术的共同之处在哪里? 除了个别的测试手段(扫描探针显微镜)外,各种测试技术都是利用入射的电磁波或物质波(如X射线、高能电子束、可见光、红外线)与材料试样相互作用后产生的各种各样的物理信号(射线、高能电子束、可见光、红外线),探测这些出射的信号并进行分析处理,就课获得材料的显微结构、外观形貌、相组成、成分等信息。 9.试总结衍射花样的背底来源,并提出一些防止和减少背底的措施 衍射花样要素:衍射线的峰位、线形、强度 答:(I)花材的选用影晌背底; (2)滤波片的作用影响到背底;(3)样品的制备对背底的影响 措施:(1)选靶靶材产生的特征x射线(常用Kα射线)尽可能小的激发样品的荧光辐射,以降低衍射花样背底,使图像清晰。(2)滤波,k系特征辐射包括Ka和kβ射线,因两者波长不同,将使样品的产生两套方位不同得衍射花样;选择浪滋片材料,使λkβ靶<λk滤<λkα,Ka射线因因激发滤波片的荧光辐射而被吸收。(3)样品,样品晶粒为50μm左右,长时间研究,制样时尽量轻压,可减少背底。 11.X射线的性质; x射线是一种电磁波,波长范围:0.01~1000à X射线的波长与晶体中的原子问距同数量级,所以晶体可以用作衍射光栅。用来研究晶体结构,常用波长为0.5~2.5à 不同波长的x射线具有不同的用途。硬x射线:波长较短的硬x封线能量较高,穿透性较强,适用于金属部件的无损探伤及金属物相分析。软x射线:波长较长的软x射线的能量较低,穿透性弱,可用干分析非金属的分析。用于金属探伤的x射线波长为0.05~0.1à当x射线与物质(原子、电子作用时,显示其粒子性,具有能量E=h 。产生光电效应和康普顿效应等 当x射线与x射线相互作用时,主要表现出波动性。 x射线的探测:荧光屏(ZnS),照相底片,探测器
粉末冶金原理考试题标准答案
2006 粉末冶金原理课程I考试题标准答案 一、名词解释:( 20 分,每小题 2 分) 临界转速:机械研磨时,使球磨筒内小球沿筒壁运动能够正好经过顶点位置而不发生抛落时,筒体的转动速度 比表面积:单位质量或单位体积粉末具有的表面积 一次颗粒:由多个一次颗粒在没有冶金键合而结合成粉末颗粒称为二次颗粒; 离解压:每种金属氧化物都有离解的趋势,而且随温度提高,氧离解的趋势越大,离解后的氧形成氧分压越大,离解压即是此氧分压。 电化当量:这是表述电解过程输入电量与粉末产出的定量关系,表达为每 96500库仑应该有一克当量的物质经电解析出 气相迁移:细小金属氧化物粉末颗粒由于较大的蒸气压,在高温经挥发进入气相,被还原后沉降在大颗粒上,导致颗粒长大的过程 颗粒密度:真密度、似密度、相对密度 比形状因子:将粉末颗粒面积因子与体积因子之比称为比形状因子 压坯密度:压坯质量与压坯体积的比值 粒度分布:将粉末样品分成若干粒径,并以这些粒径的粉末质量(颗粒数量、粉末体积)占粉末样品总质量(总颗粒数量、总粉末体积)的百分数对粒径作图,即为粒度分布 二、分析讨论:( 25 分) 1 、粉末冶金技术有何重要优缺点,并举例说明。( 10 分) 重要优点: * 能够制备部分其他方法难以制备的材料,如难熔金属,假合金、多孔材料、特殊功能材料(硬质合金); * 因为粉末冶金在成形过程采用与最终产品形状非常接近的模具,因此产品加工量少而节省材料; * 对于一部分产品,尤其是形状特异的产品,采用模具生产易于,且工件加工量少,制作成本低 , 如齿轮产品。重要缺点: * 由于粉末冶金产品中的孔隙难以消除,因此粉末冶金产品力学性能较相同铸造加工产品偏低; * 由于成形过程需要模具和相应压机,因此大型工件或产品难以制造; * 规模效益比较小 2 、气体雾化制粉过程可分解为几个区域,每个区域的特点是什么?( 10 分) 气体雾化制粉过程可分解为金属液流紊流区,原始液滴形成区,有效雾化区和冷却区等四个区域。其特点如下: 金属液流紊流区:金属液流在雾化气体的回流作用下,金属流柱流动受到阻碍,破坏了层流状态,产生紊流; 原始液滴形成区:由于下端雾化气体的冲刷,对紊流金属液流产生牵张作用,金属流柱被拉断,形成带状 - 管状原始液滴; 有效雾化区:音高速运动雾化气体携带大量动能对形成带状 - 管状原始液滴的冲击,使之破碎,成为微小金属液滴冷却区。此时,微小液滴离开有效雾化区,冷却,并由于表面张力作用逐渐球化。 3 、分析为什么要采用蓝钨作为还原制备钨粉的原料?( 5 分) 采用蓝钨作为原料制备钨粉的主要优点是 * 可以获得粒度细小的一次颗粒,尽管二次颗粒较采用 WO3 作为原料制备的钨粉二次颗粒要大。 * 采用蓝钨作为原料,蓝钨二次颗粒大,(一次颗粒小),在 H2 中挥发少,通过气相迁移长大的机会降低,获得 WO2 颗粒小;在一段还原获得 WO2 后,在干氢中高温进一步还原,颗粒长大不明显,且产量高。
检验方法验证方案(含量测定)
检验方法验证方案 目的:证明所采用的检验方法适于相应的检测要求,具有可靠的准确度、精密度。范围:含量的检定方法的前验证 编定依据:《药品生产质量管理规范》1998年修订版及验证管理办法 职责:验证小组人员 目录 1.概述 2.验证目的 3.职责 3.1验证小组 3.2品质部 3.3化验室 4.验证内容 4.1验证的准备工作 4.2适用性验证 4.2.1准确度试验 4.2.2精密度试验 4.3拟订验证周期 4.4验证结果评定与结论 5.附件
1. 概述 对小容量注射剂的含量测定,本公司采用福林酚测定法,该检验方法具有测量准确、精密度高、专属性强、定量准确可靠、方法简便易行的特点,可满足小容量注射剂含量测定的要求。检验方法标准操作规程。用本方法进行转移因子注射液、胸腺肽注射液的含量测定。 2. 验证目的 为确认对转移因子注射液、胸腺肽注射的含量测定的紫外分光光度法,适合相应的检测要求,特制订本验证方案,进行验证。 验证过程应严格按照本方案规定的内容进行,若因特殊原因确需变更时,应填写验证方案变更申请及批准书,报验证工作小组批准。 验证前,应首先对验证所需的仪器、设备进行验证,对所需仪器、仪表、量具等进行校正。 3. 职责 3.1 验证工作小组 负责验证方案的审批。 负责验证的协调工作,以保证本验证方案规定项目的顺利实施。 负责验证数据及结果的审核。 负责验证报告的审批。 负责发放验证合格证书。 负责再验证周期的确认。 3.2 品质部 负责验证所需仪器、设备的安装、调试,并做好相应的记录。 负责组织验证所需仪器、设备的验证。 负责仪器、仪表、量具等的校正。 负责拟订检验方法的再验证周期 3.3 化验室 负责验证所需的标准品、样品、试剂、试液等的准备。 负责验证方案指定的试验的实施。 负责收集各项验证、试验记录,并对试验结果进行分析后,报验证工作小组。 4. 验证内容 4.1 验证的准备工作 4.1.1 验证所需文件资料 品质部负责提供验证所需的文件资料,包括该检验方法的标准操作规程。以及负责提供验证所需仪器、设备的验证报告以及仪器、仪表、量具等的校正报告。 检查人:日期: