ZigBee无线网络和收发器2.5

1第三章ZigBee和IEEE 802.15.4协议层——————————————————————物理层的全部内容由outman翻译
1.1 ZigBee和IEEE 80
2.15.4网络层
1.2 ZigBee和IEEE 80
2.15.4物理层
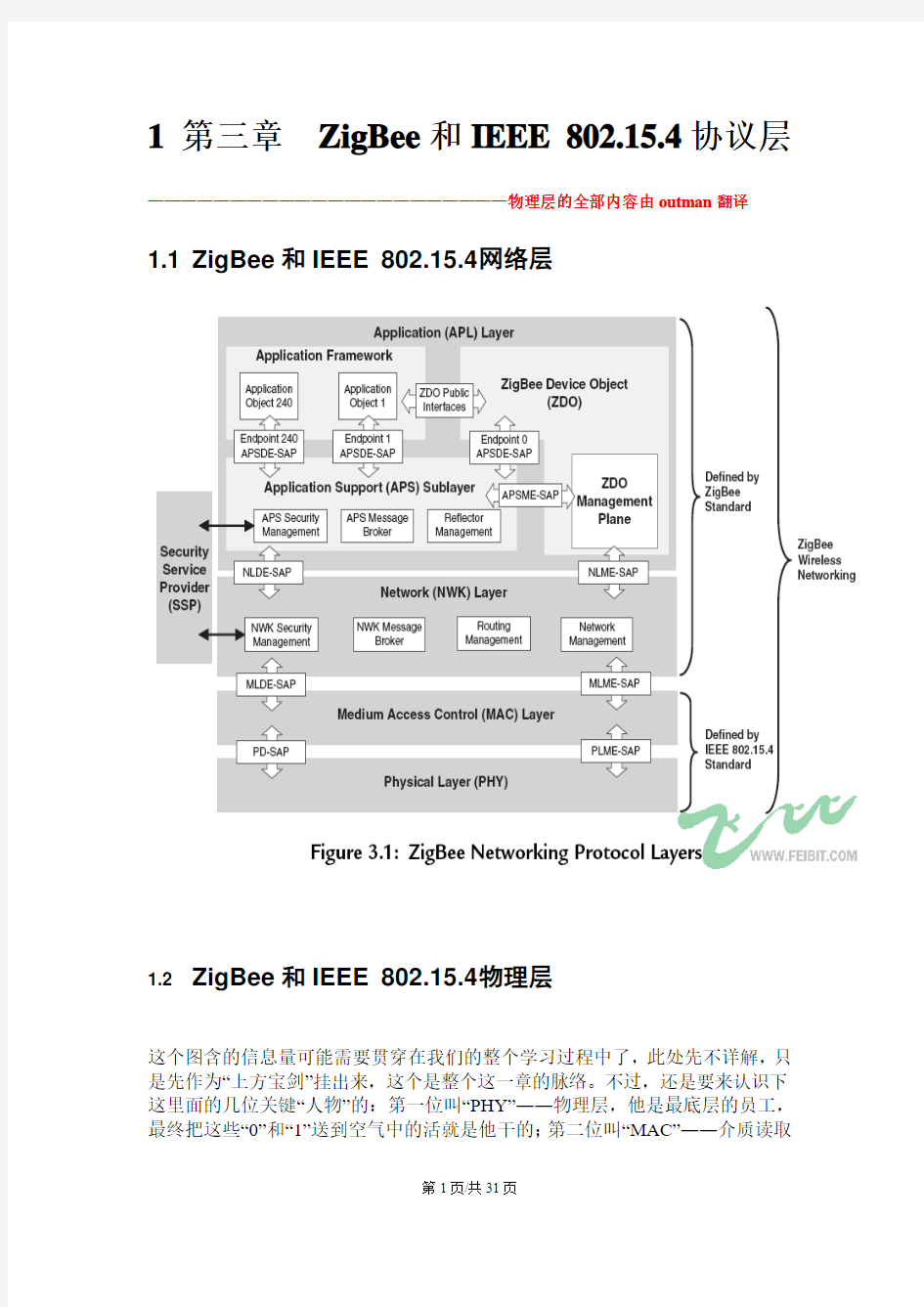
这个图含的信息量可能需要贯穿在我们的整个学习过程中了,此处先不详解,只是先作为“上方宝剑”挂出来,这个是整个这一章的脉络。不过,还是要来认识下这里面的几位关键“人物”的:第一位叫“PHY”――物理层,他是最底层的员工,最终把这些“0”和“1”送到空气中的活就是他干的;第二位叫“MAC”――介质读取
控制层(这个家伙肯定是老外,连个像样的中文名都没有);第三位叫“NWK”――网络层,这是个中层干部,属于实干家型(就是公司里电话最多的那种领导);第四位叫“APL”――应用层,有同学问了,这层里面怎么这么复杂?说实话,我也还没弄明白呢,不过按常理来说,高层复杂是应该的,到我们的政府机关看看就知道啦~~~
另外,下面两层是由IEEE 802.15.4来定义的,而中层领导上的就是由Zigbee 组织来定义的,那什么是我们定义的呢?就是这个“协议栈”上面的,那就是最高最高的领导啦~~~
第三章,第一层――“PHY”――物理层
1.2.1频率安排
首先,我们从干活的这个小兄弟开始认识。他要把一个比特送到空中,是有几条航线可以选的,就这是所谓的“频道”,每一个频道对应一个频率,而每一个频道又有几种调制方式,我们可以理解为坐不同的“飞机”。下图是IEEE 802.15.4中对频道的安排:
对于这里面的“频道页”的定义,不是太清楚为什么要这样定义,不过我觉得用前面说的“飞机”的概念,更容易理解些。有三种不同的飞机,每种飞机都可以
走0-26,共27条航线,这就是“物理层”在送数据的时候要做出的选择。其中,0号航线的频率是868MHZ,915M上有10条航线,其频率可以通过下面公式计算:
中心频率(MHz) =906 + 2 × ( 频道号– 1)
同样,2.4G波段上的频率值为:
中心频率(MHz) =2405 + 5 × ( 频道号– 1)
1.2.2能量检测——ED
就像航空公司一样,“比特”想要“飞”起来,也是有“航空管制”的,在起飞前要确认下航道有没有被占用,这可不能像开车,塞车了就等会,飞机要在空中停了,那不得掉下来(我小时候总这么想~)。能量检测就是用来实现这个目的的,当然,这只是个“能量”检测,它不会去区分到底是谁在占用“航道”,它只检测有或者没有。
当然,这也是物理层的上级――MAC层给他的任务之一,不过允许他不用百分百准确,允许10db的误差,结果会以一个8比特的字节向上报告。
1.2.3载波检测――CS
载波检测也是检测当前频道能不能用的,但与ED不同,上面说了ED不会去区分到底是谁在占用“航道”,但是CS会的,它会根据载波的特征去判断当前占用“航道”的是不是与自己一样的IEEE 802.15.4物理层信号,如果是,那不管ED值是多少,都会返回一个“频道忙”的信息。
1.2.4连接质量指示――LQI
还记得电脑的WIFI指示吧,我也不了解WIFI协议,但我想这应该是相同的东西吧。在802.15.4中,有两种检测连接质量的方法,一个是检测“接收信号强度”――RSS,另外一个是检测“信噪比”――SNR。RSS值是通过检测接收到的信号的全部能量情况来判断的。
又有人举手了?这位同学有什么问题?――什么,这是怎么做到的?
呃、、、这个我真不懂,不过我知道肯定有个寄存器来读的。至于这个值是怎么来的,你还是问下做IC的人,或者你找个不是那么忙的教授,说不定他知道~~~不过这位小同学啊,看你问这个问题,我得多说你几句了。你这么“叫真”不
好,倒不是打击你,我知道你说不定能成个人物,不过,学习是要讲“深度”和“广度”并举的,如果什么事情都一头钻进去,你会迷路的。。。
我们继续,那“信噪比”SNR,顾名思义,就是信号除以噪声的比率了。当然,值越大表示信号质量越好。
每一个接收到的数据包都会做一个LQI的测量,它至少有八个等级。这个测量是物理层很重要的一个任务,因为这个值不但他的直属领导-MAC层要用到,他的上几层领导-网络层和应用层都用得到。比如说网络层(NWK)在选择路由的时候,LQI就是一个很重要的指标,LQI值高的路径当然要优先考虑,当然,这也只是一个因素,比如说这个LQI高的路径里的设备都是电池供电的,那么在频繁选择这个路径的同时,必然会导致这些设备电池寿命缩短。所以,一定要多方面权衡――这就体现了“领导”的作用。。。
1.2.5空闲频道评估――CCA
(注:本教程里的中文名称可能不符合标准,只是方便笔者说明问题,如对名称有异议,欢迎在本教程论坛-https://www.360docs.net/doc/d07613131.html,中讨论)
这里有一个很重要的名词叫“CSMA-CA”,听起来就像高科技,不知道和CDMA有没什么关系(做通讯的朋友开始扔砖头了~~~)
它有一个不太帅的中文名字叫“载波侦听多点接入/冲突避免”,笔者现在还无法对这个概念做个定义,不过倒是可以用“白话”翻译一下。在上文中我们看到,当我们的“PHY层”小弟要发送一个比特的时候,要面临那么多选择,走哪个航线,选什么样的飞机等等,那这么复杂的决策,“小弟”能搞得定吗?要两个“小弟”都在争一个位置,打架了怎么办?按社会常理来看,这应该不是哪个人决定的,而是有个“制度”,这样说,能理解不?
当然,制度也是要人来执行的,一个最底层的工作叫“空闲频道评估”――CCA,这个也是由我们的小弟“物理层”来做的。他要告诉MAC层,当前频率有没有被其它设备占用。而且这个工作不能只做一次就汇报,要检测8个符号周期。
在IEEE 802.15.4物理层协议中,有三种CCA模式:
1.只检测ED值。只要ED值高于一个门限就认为当前频道被占用。这个门限值可以由设计者来定义。
2.只由CS结果来决定。只要CS的检测结果为: "当前频道被IEEE 802.15.4定义的设备占用",则返回频道忙。
3.由上述两个值的“与”或者“或”逻辑来决定。也说是说
●ED值高于门限“并且”有802.15.4设备占用,则认为频道忙
●ED值高于门限“或者”有802.15.4设备占用,则认为频道忙
那究竟采用哪种CCA模式呢?这个可以通过PHY属性值phyCCAMode来设置。这个值也是PHY-PIB值的一部分,下面的章节会对这个概念进行介绍。
1.2.6物理层常量和属性
首先说明一下“常量”和“属性”这两个词,所谓的常量就是说在“编译”好之后不能变的量;而属性则是可以改变的。在Zigbee协议栈中,每一层都有自己的常量和属性。
如表3.2所示,物理层中只有两个常量,aMaxPHYPacketSize指示“物理层服务数据单元”――PSDU不能超过127字节;而aTurnaroundTime说明一个设备由接收状态转为发送状态的最大时间,也就是说一个接收器必须在12个符号周期内完成接收任务。
同时要说明的一点是,PHY和MAC层的所有常量都有一个前缀“a”,这是Zigbee协议的规定,NWK和APL层分别以前缀“nwkc”和“apsc”开始。
物理层的“属性”包含在“物理层PAN信息基准表”――PHY-PIB中,这个表是专门用来管理物理层服务的,详细信息在表3.3中,其中有(+)标志的为只读属性,上层只可以对此类属性进行“读”操作,只有物理层自己才能“写”;而有(*)标志的属性,其个别指定位为“只读”;其余的属性则可读可写。后面章节会对每个属性详细阐述。
1.2.7物理层服务
我们研究了半天物理层是怎么工作的,下面看下我们到底怎么“吩咐”他,他到底提供了哪些“服务”。
物理层提供了两种类型的服务,一种是数据服务,一种叫物理层管理服务。顾名思义,数据服务通过无线电波对“物理协议层数据单元”――PPDU进行发送和接收,说简单点就是收发数据;另外,物理层中包含了一个叫“物理层管理实体”――PLME的一个管理单元,如下图所示,数据服务是通过PD-SAP实现的,而物理层管理服务是通过PLME-SAP来实现的,其中PLME也包含上文所述的PHY-PIB。
1.2.7.1 物理层数据服务
咦,这个图是不是上错位置啦?怎么还是1.11呢?不会啦,像俺这么仔细的人,咋会犯这种低级错误呢~~~
感觉这个地方应该补补课了,这个图里面有一个很重要的概念,就是“Payload”,字面理解,就是要付费的信息,那其他的信息不用“付费”吗?恩,可以这样理解,除了Payload之外的信息都是些辅助信息,免费赠送啦~~
PHY的Payload就是整个MAC层数据,MAC层的Payload就是整个NWK 层数据,以此类推。从上图中我们也容易看出,每一层都会增加一些本层的辅助信息,然后传递给下层去传输。
回到这节的主题,物理层的数据服务到底可以做哪些事情呢?简单地来说,就是为MAC层提供了“MAC协议层数据单元”――MPDU的传输,这个名字不陌生吧,前面我们不是刚讲了一个PPDU吗?当然还会有NPDU和APDU啦,道理都一样,就不一一介绍啦。不过,不要忘记那些“免费赠送”的信息哦,那也是很重要的,比如LQI信息等等。
如果传输服务失败,会返回下面几种原因之一
1、发送器工作不正常
2、发送器在接收模式,一个设备同时只能在接收和发送中的一种状态
3、发送器忙
再上一个图来直观表示下各层间的通讯
这个图貌似复杂,但谁让咱都是“炎黄子孙”呢,用老祖宗的一句话就能理解这个图了――兵对兵,将对将。。。
1.2.7.2 物理层管理服务
如图3.2,此服务名为PLME-SAP,它会在PLME和MLME中传递命令信息。它提供的服务有如下几种:
1、空闲频道评估――CCA
2、能量检测――ED
3、打开/关闭发送器
4、从PHY-PIB中获取信息
5、设置PHY-PIB属性
1.2.7.2.1空闲频道评估――CCA
其概念已在前面讲解过,这里看下它可能返回的结果:
1. 发送器异常,那CCA就没意义了
2. 频道空闲,可以传输
3. 频道或者发送器忙,这两种情况PLME不再做区分,均返回“忙”
1.2.7.2.2能量检测――ED
ED检测请求由MLME发出,由PLME执行,最终结果返回MLME。
1.2.7.2.3打开/关闭发送器
MLME可以通过PLME让发送器进入以下三种状态之一:发送器关闭、发送器打开和接收器打开
1.2.7.2.4从PHY-PIB中获取信息
同样,读取请求由MLME发出,由PLME执行,最终属性返回MLME
1.2.7.2.5设置PHY-PIB属性
除了只读属性外,MLME可通过PLME设置PHY-PIB的属性
1.2.8服务原语
在802.15.4和Zigbee协议中,用“原语”的概念来描述相邻两个层间的服务,层间调用函数或者传递信息,都可以用原语来表示。虽然,在整个系统中,有很
多不同的层,但是层间的通讯方式是非常相似的。比如PHY、MAC与NWK层都为他们的上一级提供数据服务,其请求数据服务的机制类似:高层通过D-SAP向下级请求传输,下级传输成功后将状态返回给上级。
正是由于这种相似性,才让“服务原语”这种方式显得格外重要。每一个原语要么执行一个指令,要么返回一个之前指令的运行结果。原语也会带着指令运行需要的参数。
上图描述了某层为其上层提供服务的一般方法,如图所示,有四种类型的原语:请求、指示、响应和确认。换句话说,在802.15.4和Zigbee标准中的所有服务都可以归类为上述四种原语之一。原语用下面的格式来描述:
(注:出于本文读者多数为现在或者未来的软件工程师,后面直接用英文名称来表述四种原语)
首先,由N+1层向N层用request原语申请一个服务,比如说MAC层向PHY 层请求一个MPDU传输服务,它必须要向PHY层申请一个PD-Data.request的原语。
而N层会向其服务用户(经常是N+1层)发出一个indication的原语,用来指示一个对N+1层很重要的事件。比如说,PHY层接收到一组数据,需要将此数据传递给MAC层,那么它就向MAC层产生发出一个PD_Data.indication的原语,用来向其传递数据。
如果这个indication原语要求对其做出响应,那么N+1层就会发出一个response原语。值得注意的是,PHY和NWK层没有任何response原语,而只有MAC和APL层有。
而confirm原语是由N层发出,用来最终确认最初N+1层申请的request服务已经完成。比如在上例中,数据发送完成后,PHY层会告诉MAC层,传输已经成功完成。
注:本文只是用一种浅显易懂的方式,让读者了解原语的基本概念,如果读者需要深入了解每层提供的原语细节,请直接阅读802.15.4和Zigbee的协议文档。
1.2.9物理层的数据包格式
如图所示,PPDU主要包含三部分主要内容:同步头(SHR),PHY层头信息(PHR)和PHY层的“有效负载”-payload。
我们一起来分析一下,这三部分里面具体包含了哪些内容。
同步头SHR包含了接收时所需要的同步信息,以使得在接收端产生与发送端相同的同步信息,用以还原最初的比特流。PHR包含了数据桢的长度信息。PHY Payload是它的上层服务用户要求它发送的实际有效数据。
SHR包含了一个“前导同步(preamble)”和一个“桢开始分隔符(SFD)”,Preamble用来让接收器获取同步信息的,其详细信息暂不做介绍,如果后续有需要再补上。
SFD代表了SHR的结束与PHR的开始,除了ASK调制模式外,其他模式的SFD数据如下图所示:
下一部分的数据是PHY数据包的桢长度,它代表了PHY的Payload(PSDU)的全部字节长度,其值的范围为1-127(前述的PHY常量中可对其进行定义),但实际上它取决于802.15.4-2006的标准,如下图所示,当其值为5,表示的是这是一个MAC的“握手”桢,9-127可以为任意的MPDU,而0-4,6-8暂为定义,为以后的扩展定义做保留。
最后的部分PSDU是PHY层的实际“Payload”,它是由MAC层提供的,需要PHY层传输的有效数据。――就是要付费的那部分~
另外,在802.15.4标准中,数据的传输顺序是这样的:SHR的低位首先传输,而PSDU的高位是最后传输的。
1.2.10物理层的职责总结
PHY层这位“小弟”是直接跟无线电波打交道的,讲了这么多,最后让我们回头再来总结下,他到底要做些什么:
1. 激活、禁止无线电波传输
2. 发送、接收数据
3. 选择一个频道(发送器需要发送数据的准确频率)
4. 实现能量检测(ED)。ED检测是用来评估所要传输的频道的能量值,用以决定当前频道是否空闲,是否可用以传输数据。
5. 进行空闲频道评估――CCA
6. 产生LQI值,用以衡量接收数据包的质量,指示信号强度
—————————第三章中以上部分由outman翻译///////////////////////////////////////////////////////////////////////////////////////////// /////////////////////////////////////////////////////////////////////////////////////////////
1.3 IEEE 80
2.15.4 MAC层
(注意点:网络中的设备类型有三种,协调器,路由器,终端。有时又将路由器和终端统称为设备(Device),即非协调器。文中很多处使用“设备”一词,很多情况下,其意思不是指所有的设备,而是指除协调器外的其他设备类型,遇到“设备”一词时,请大家自己结合上下文具体理解“设备”的意思。)
MAC层为其下一层和PHY层之间提供了接口,在zigbee无线网络中,这个“下一层”指的是NWK层。IEEE802.15.4不是专门为zigbee应用而开发的,因此“下一层”可以是任何网络协议层。在这边书中,主要讨论了MAC层和zigbee NWK层间的相互作用。
图3.6显示了MAC子层参考模型。MAC层类似于PHY层,有一个管理实体叫MAC层管理实体(NLME), 它负责MAC管理服务。MLME与其在NWK 层中的对应项(NWK层管理实体,或NLME)进行相互作用。
MAC层也有其自己的数据库,叫做MAC PAN信息库(MAC-PIB)。所有的MAC常量都有一个通用的前缀a ,所有的MAC属性都有一个通用前缀mac 。MAC-PIB的大小比PHY-PIB要大。(“IEEE 802.15.4 standard document [2]”中提供了MAC的常量和属性)。
1.3.1信标操作和超帧结构
信标使能的网络优点之一就是具有保证时隙(GTS)。信标帧就是包含信标信息的MAC帧,例如信标间的时间间隔和GTS个数。信标帧格式在3.3.5.2小节有介绍。
在信标操作中,可能会使用一个超帧结构。如图3.7所示,一个超帧以两个
信标帧为边界。在IEEE 802.15.4标准中,是否使用超帧结构是可选的。在一个超帧中可以有最多三种类型的时间段(Period):竞争时间段(CAP), 无竞争时间段(CFP)和非激活时间段(Inactive Period)。
附上CAP英文解释:contention access period (CAP): The period of time immediately following a beacon frame during which devices wishing to transmit will compete for channel access using a slotted carrier sense multiple access with collision avoidance (CSMA-CA) mechanism.直接跟在信标帧后的这段时间内,想要发送信息的设备,将会使用CSMA-CA机制进行竞争,这段时间就是CAP。
在CAP期间,所有想发送信息的设备需要使用CSMA-CA机制来访问一个频道。该频道对同网络中的所有设备同样有效,第一个开始使用一个有效频道的设备将会把该频道据为己有,直到它当前的发送完成。如果设备发现频道正忙,它会等待一段随机时间然后重新访问。对一个大网络中的多数设备来说,这是最可能的信道访问机制。MAC命令帧必须在CAP期间发送。
在CAP期间,无法保证任意设备都能使用一个频道,而CFP则为特定的设备保证了一个时隙,因此,设备无需使用CSMA-CA机制来访问频道。这为许多低延迟应用,例如那些等待不起一段/随机和潜在的长时间/直到频道有效的应用,提供了一个很好的选择。CFP中不允许使用CSMA-CA。
CAP和CFP合起来叫激活时间段(Active Period)。激活时间段被平均分成了16等份的时隙,信标帧总是开始于第一个时隙的开头。CFP中有最多7个GTS, 每个GTS占用一或多个时隙。
超帧可以选择是否带有非激活时间段,非激活时间段允许设备进入省电模式。在省电模式期间,协调器可以关闭它的收发器线圈来节省电池能量。
超帧结构由协调器定义,并且在网络层中使用MLME-START.request primitive请求原语进行配置。两个连续信标间的持续时间,时间间隔(BI), 由数值macBeaconOrder (BO)属性和aBaseSuperframeDuration常量使用下面的等式决定:
BI = aBaseSuperframeDuration× 2BO(symbols)
例如,给出aBaseSuperframeDuration的值是960 Symbols, 而BO的值是2,那么信标间隔BI将会是3840 symbols. (“IEEE 802.15.4 standard document [2]”中提供了MAC的常量和属性)。
在一个信标使能的网络中,BO可以是0-14中的任何值,如果BO的值被设置为15,网络将被认为是非信标使能,并且不使用任何超帧。
类似的,超帧激活时间段的长度叫做超帧持续时间(SD), 由下面等式计算得到:
SD = aBaseSuperframeDuration × 2SO(symbols)
其中SO是macSuperframeOrder属性的值。超帧持续时间SD不能超出信标间隔BI,因此,SO的值总是小于或等于BO。
在一个非信标使能的网络中(例如BO = 15时),协调器不发送信标,除非它从网络的某个设备接收到一个信标请求命令。设备使用信标请求命令来定位协调器的位置。3.3.5.5.5小节提供了信标请求命令的格式。非信标网络中的PAN 协调器设置SO的值为15。
在信标使能网络中,除了PAN协调器,任何协调器都可以选择性的发送信标和创建自己的超帧。图3.8显示了当PAN协调器和网络中另一个协调器都在发送信标时所需要的时序。协调器只能在PAN协调器超帧的非激活时间段开始发送信标。PAN协调器信标被叫做“接收信标”,其他任何协调器的信标被叫做“发送信标”,两个超帧的激活时间段(Active Period)必须具有相等的长度。除了PAN 协调器,其他的协调器只能发送一个信标来表明其超帧的开始,而超帧的结束则可以和PAN协调器的结束相同。
如果一个设备没有使用其GTS来获得一段延长时间,它的GTS将会终止,并且协调器可以把这个特定的GTS分配给一个不同的设备。非激活时间段能够导致GTS终止,它总是两个超帧长度的整数倍,这个倍数的值(n)取决于BO 的值:
n = 2(8 – BO)if 0 <= BO <= 8
n = 1 if 8 <= BO <= 14
例如,一个设备的BO为7,且在四个连续的超帧中没有使用它的GTS,那么它的GTS将会终止。
1.3.2帧间间隔
从一个设备向另一个发送数据时,发送设备必须在两个连续发送的帧间进行简短的等待,以允许接收设备在下一帧到达前对接收到的帧进行处理,这被称作帧间间隔(IFS)。IFS的长度取决于发送帧的大小。小于或等于aMaxSIFSFramesSize的MPDU被当作短帧,而长帧则是长度大于aMaxSIFSFramesSize个字节的MPDU。
短帧后的等待阶段被称作是短IFS(SIFS),SIFS的最小值是macMinSIFSPeriod。类似的,长帧后跟随一个长IFS(LIFS), 其最小长度是macMinLIFSPeriod。macMinSIFSPeriod和macMinLIFSPeriod的值分别是12和40 symbols。
图3.9中显示了帧间间隔的两种情景。在第一个中,消息得到了应答,并且应答帧和下一帧间的等待时间是LIFS还是SIFS取决于帧的长度。从发送一帧到
接收到应答帧间的时间段在图中用t ACK表示。如果不需要应答帧,那么最小的帧间间隔开始于帧发送的时刻。
1.3.3CSMA-CA
IEEE 802.15.4的MAC层所支持的信道访问机制是载波检测多点接入碰撞避免(CSMA-CA)。在CSMA-CA中,当设备想要发送信息时,它将执行一条CCA 来确保信道没有被其他设备使用,然后设备开始发送自己的信号。第一章中对CSMA-CA进行了简单的概述,而本部分提供了更详细的内容。
除了发送信标外,还有两种不使用CSMA-CA算法来访问信道的场合:
●在CFP期间访问信道
●应答一个数据请求命令后直接发送信息。换句话说,如果一个设备从协
调器请求数据,协调器在数据后直接发送应答信息将不需要在这两个发
送间执行CSMA-CA,即使是在CAP期间。
CSMA-CA有两种类型:slotted和unslotted。Slotted CSMA-CA是当没有超帧结构在合适位置的时候,执行CSMA-CA。超帧将激活时间段划分为16等份时隙,CSMA-CA算法的等待阶段需要分配给下面讨论的特定时隙。Unslotted CSMA-CA 在没有超帧结构时使用,因此,等待时间段调整是没有必要的。非信道使能网络通常使用unslotted CSMA-CA算法访问信道。
如果CCA表明信道忙,设备将等待一段随机时间然后重新尝试,在slotted 和unslotted CAMA-CA中的这段等待时间是单位等待时间段的整数倍。而单位等待时间等于aUnitBackoffPeriod (一个MAC常量)symbols。
图3.10(葵花宝典第53页,图太大没有截图)是CSMA-CA算法的流程图。在算法的第一步,需要选择使用slotted还是unslotted CSMA-CA。CSMA-CA算法使用了三个变量:等待幂(BE),等待次数(NB)和竞争窗口(CW)长度。
每次算法遇到信道繁忙的时候,它等待随机的一段时间,这段时间的范围由BE决定。
这段等待时间可以是0到2BE
-1之间的任意整数乘以单位等待时间:
Back-off = (0到2BE-1之间的任意整数) ×aUnitBackoffPeriod
在一个unslotted CSMA-CA信道访问中,BE的初始值等于macMinBE。在一个slotted CSMA-CA中,超帧结构中电池寿命延长(BLE)选项的选择会影响BE的值。如果BLE选项被激活,协调器在紧跟信标帧发送的一段等于macBattLifeExtPeriods的时间段后,关闭其接收器来节省能量。这样,等待时间的范围就被限定在了2和macMinBE两个数中最小的一个:
BE = min(2, macMinBE)
如果BLE选项没有被选择,协调器在CAP期间处于激活状态,并且BE的值等于macMinBE(与unslotted CSMA-CA类似)。CCA每检测到一次信道繁忙,BE的值就会加一,但BE的值不能超出macMaxBE。
NB是一个计数器,它跟踪设备等待并且重新尝试信道访问机制的次数。在算法开始时,NB等于0,每次设备由于遇到信道忙而等待时,NB的值加一。如果NB达到macMaxCSMABackoffs时信道访问仍然没有成功,CAMA-CA算法就会放弃,并且在NWK层报告信道访问失败。
竞争窗口(CW)变量决定了等待次数,信道在开始发送信息前必须有效。例如,如果CW等于2,表明设备在两个连续等待后产生一个有效(空闲)信道。CW仅在slotted CSMA-CA算法中使用。
若再运行的时间内发送没有完成,MAC会等待直到下一个CAP开始,并且再次尝试CSMA-CA信道访问算法。
1.3.3.1 隐藏和暴露节点问题
CSMA-CA算法的一个缺点是隐藏节点(终端)问题。考虑一下图3.11a中显示的例子,在该例子中,节点A和C之间放置的太远而不能接收彼此的信号。然而,节点A和C都可以和节点B通信。在每个节点中,信号的能量随着天线间距离的增加而降低。当节点C发送信息时,节点C在A处信号能量的等级太弱,因此A的能量检测机制检测不到另一个信号的存在,并宣布频道有效(空闲)。类似的,节点C也检测不到节点A信号的存在。现在,如果节点A和C 同时决定使用相同的频道发送数据包到节点B,他们可能会同时发现频道有效并且同时开始发送数据包。这将在节点B处产生冲突。
解决这个问题的一个方法是改变节点的位置或者增加因此节点的输出功率,以确保节点A和C可以检测到彼此的信号。在软件层面上,IEEE 802.15.4 MAC 层没有很好的来帮助解决隐藏节点的问题,例如,IEEE 802.15.4 没有普遍支持“请求到应答”/“空闲到发送”(RTS/CTS)握手机制,而该机制却被用在IEEE 802.11中来解决隐藏节点的问题。
另一个相关的CSMA-CA的缺点是暴露节点(终端)问题。在图3.11b中,节点E想在节点F向G发送信息时向D发送信息。节点D在节点F的无线影响范围之外,因此,节点E和F可以同时发送信息而没有任何冲突。但是CSMA-CA 将阻止节点E发送信息,因为节点E在F的无线影响范围内,因此当节点F发送信息时,由节点E执行的CCA将认为信道忙碌。这个不必要的阻止被叫做暴露节点问题。建议的解决暴露节点问题的方法有:改变节点位置,降低节点输出功率到维持可靠通信的最低要求,使用RTS/CTS握手机制。
1.3.4MAC服务
MAC层提供两种类型的服务:MAC数据服务和MAC管理服务。MAC数据服务由NWK层数据实体(NLDE)通过MAC公共部分子层服务接入点(MCPS-SAP)来访问。MAC管理服务通过MLME-SAP来访问。
全功能设备(FFD)必须使用整个MAC数据服务,但在MAC管理服务中有一些功能是可选的。在MAC数据和管理服务中有一些功能是FFD所必须具备的,但对半功能设备(RFD)来说却是可选的。在“IEEE 802.15.4 standard
document [2]”中,这些对RFD可选的功能(服务原语)用方块(?)表示,对RFD和FFD都可选的能力用星号(*)表示。
1.3.4.1 MAC数据服务
MAC层为NWK层提供数据服务,需要发送的数据以NPDU的形式提供。NPDU被放在MAC payload中,叫做MSDU。NWK层通过MCPS-SAP产生数
智能照明zigbee联网解决方案
方案介绍 SHUNCOM zigbee智能照明解决方案结合TI CC2530高性能无线微控制器与智能家居zigbee网关,使得应用该技术的每一个灯都有其独立的MAC地址,可以通过智能手机、智能家居控制面板等控制终端实现对灯光的开关、分组、场景、策略等功能的控制。 方案特色 ?开发周期短,开发成本低。 ?安装方便:无须布线,安装时间与标准照明系统几乎相同。 ?每个灯都有其独立的MAC地址,可通过MAC地址进行监测和控制。 ?高度个性化的智能照明,在您需要的时间和场所打开或关闭灯光,选择适合自己的亮度。 ?节能、减少电费开支。 ?支持ZLL, ZHA协议,可与其他基于此协议的智能家居网关互联互通,如Amazon Echo Plus。
系统示意图 系统组成 由三部分组成,灯、网关和app。 1.灯部分 1)硬件部分
采用SHUNCOM SZ05-L-PRO-2模块,模块详细参数如下;其中天线可采用外置天线或内置板载天线。 指标名称技术参数 通信距离SZ05-L-PRO-2 (800 米) 无线频率 2.405 到2.480MHz 调制方式O-QPSK 无线信道16 个 信道检测CSMA/CA 通信协议支持Z LL, ZHA, ZigBee Pro 标准 IO 功能四路PWM输出,六路AD采样(两路复用) 网络拓扑MESH 单网容量65535 个节点 最大数据包82/帧, 发送模式广播或目标地址发送 串口速率9600 ~ 115200 输入电压DC3.3 接收灵敏度-95dbm±3dbm (带P A -106dbm±2dbm) 发射功率(SZ05-L-PRO-2)19dbm ; 平均电流(SZ05-L-PRO-2)34mA ; 峰值电流(SZ05-L-PRO-2)130mA ; 休眠电流 2.2~2.4uA 数据接口TTL 天线接口外置天线或内置天线,IPEX 天线 尺寸规格支持邮票孔贴片和直插 数据位8 停止位1,2 校验None, Even, Odd 加密方式支持AES 加密和CRC 校验 工作环境-40°C ~ 85°C 2)软件部分 SHUNCOM提供符合zigbee联盟标准的ZHA/ZLL通信协议,保证设备的互联互通。 2.网关部分
ZIGBEE无线定位技术
ZIGBEE无线定位技术 大多数无线传感器网络都要求具备一种确定网络节点位置的方法。因此在设备安装期间,需要弄清楚哪些节点相互之间直接进行数据交换,或者确定哪些节点直接与中央数据采集点进行数据交换。 当通过基于软件的计算方法来确定网络节点位置时,就需要考虑到市场化解决方案(market solution)。这些具体的计算方法是:节点首先读取计算节点位置的参数,然后将相关信息传送到中央数据采集点,对节点位置进行计算,最后,再将节点位置的相关参数传回至该节点。这就是典型的数据密集型计算,并且需要配置一台PC 或高性能的MCU。 这种计算节点位置的方法之所以只适用于小型的网络和有 限的节点数量,是因为进行相关计算所需的流量将随着节点数量的增加而呈指数级速度增加。因此,高流量负载加上带宽的不足限制了这种方法在电池供电网络中的应用。 针对上述问题,CC2431 采用了一种分布式定位计算方法。这种计算方法根据从距离最近的参考节点(其位置是已知的)接收到的信息,对节点进行本地计算,确定相关节点的位置。因此,网络流量的多少将由待测节点范围中节点的数量决定。另外,由于网络流量会随着待测节点数量的增加而成比例递增,因此,C C2431 还允许同一网络中存在大量的待测节点。 本文所提供的结果是根据对ZigBee 网络的测量得出的,然
而,这些测量结果同样适用于基于IEEE 802.15.4协议构建的更简单的网络。 定位引擎技术 定位引擎根据无线网络中临近射频的接收信号强度指示(R SSI),计算所需定位的位置。在不同的环境中,两个射频之间的RSSI 信号会发生明显的变化。例如,当两个射频之间有一位行人时,接收信号将会降低30dBm。为了补偿这种差异,以及出于对定位结果精确性的考虑,定位引擎将根据来自多达16 个射频的RSSI 值,进行相关的定位计算。其依据的理论是:当采用大量的节点后,RSSI 的变化最终将达到平均值。 在RF 网络中,具有已知位置的定位引擎射频称为参考节点,而需要计算定位位置的节点称为待测节点。 要求在参考节点和待测节点之间传输的唯一信息就是参考节点的X 和Y 坐标。定位引擎根据接收到的X 和Y 坐标,并结合根据参考节点的数据测量得出的RSSI 值,计算定位位置。 将定位技术纳入网络协议 一些采用定位引擎的应用可能要求放置若干个参考节点,以作为基础设施设置不可或缺的一部分。ZigBee 技术能够实现对家庭、办公以及工业等应用的无线控制。随着ZigBee 设备在楼宇基础设施中的安装数量不断增多,ZigBee 将会在家庭和办公自动化方面拥有更为广阔的应用前景。
最新ZigBee无线智能照明解决方案-2014
最新Z i g B e e无线智能照明解决方案-2014
最新智能家居解决方案-2014 一.智能家居背景简介 智能家居概念的起源很早,但一直未有具体的建筑案例出现,直到1984年美国联合科技公司(United Techno1ogies Building System)将建筑设备信息化、整合化概念应用于美国康乃迪克州(Conneticut)哈特佛市(Hartford)的CityPlaceBuilding时,才出现了首栋的“智能型建筑”,从此也揭开了全世界争相建造智能家居的序幕。 经过多年的需求累积,目前通常把智能家居定义为利用计算机、网络和综合布线技术,通过家庭信息管理平台将与家居生活有关的各种子系统有机地组合成一个系统。具体来说,就是首先在一个家居中建立一个通讯网络,为家庭信息提供必要的通路,在家庭网络操作系统的控制下,通过相应的硬件和执行机构,实现对所有家庭网络上的家电和设备的控制和监测。其次,它们都要通过一定的网络平台,构成与外界的通讯通道,以实现与家庭以外的世界沟通信息,满足远程控制、监测和交换信息的需求。最终达到满足人们对安全、舒适、方便和绿色环保的需求。 随着社会经济结构、家庭人口结构以及信息技术的的发展变化以及人类对家居环境的安全性、舒适性、效率性要求的提高,造成家居智能化的需求大大增加,同时越来越多的家庭要求智能家居产品不仅要满足一些基本的需求,更要求智能家居系统在功能扩展、外延甚至服务方面能够做到简单、方便、安全。二.常用智能家居技术介绍及比较 虽然智能家居的概念很早就出现,市场需求也一直存在,但长期以来智能家居的发展由于受制于相关技术的突破,一直没有得到大规模的应用普及。目前市场存在的智能家居技术介绍如下: 1.有线方式
ZigBee网络拓扑结构显示
实验二ZigBee网络拓扑结构显示 【实验目的】 1、熟悉Qt编写程序的方法; 2、了解Qt显示ZigBee网络拓扑结构的工作原理; 【实验设备】 1、装有RedHat AS5系统或装有RedHat AS5虚拟机的PC机一台; 2、物联网开发设计平台一套; 【实验要求】 使用Qt为ZigBee网络编写拓扑结构; 1、编程要求:使用提供的API函数编写应用程序; 2、实现功能:构建ZigBee网络拓扑结构; 3、实验现象:显示网络的拓扑结构; 【实验原理】 本实验箱针对Qt下,将服务程序的API做了一定的封装,并提供了非常方便使用的接口函数,可以让用户在Qt环境下绘制Zigbee网络的拓扑结构。这些函数都被封装在一个叫做TopologyWidget的类中,它们的详细介绍如下: 【函数原型】void TopologyWidget::SetTopologyArea(const QString &ip, QScrollArea *area); 【功能】设置用来显示拓扑图的滚动区域控件 【参数】ip: 运行服务程序的网关(计算机)的IP地址area: 用来显示拓扑图的滚动区域控件【返回值】无 【头文件】使用本函数需要包含"topologywidget.h" 【函数原型】void TopologyWidget::UpdateTopologyArea(QScrollArea *area); 【功能】立即刷新滚动区域控件中的拓扑图 【参数】area: 用来显示拓扑图的滚动区域控件 【返回值】无 【头文件】使用本函数需要包含"topologywidget.h" 在实际应用中,用户需要首先在界面中放置一个,假设其名称为“scrollArea”,只需要在窗体的构造函数中,完成了setupUi的操作之后,调用TopologyWidget::SetTopologyArea函数即可使拓扑图显示在这个滚动区域中,参考下面的代码。 Widget::Widget(QWidget *parent) : QWidget(parent), ui(new Ui::Widget) { ui->setupUi(this); // 将界面中的scrollArea设置为用来显示拓扑图 TopologyWidget::SetTopologyArea("127.0.0.1", ui->scrollArea); } 【实验步骤】 1.双击打开桌面上的VMware Player。如图 2.1所示;
基于ZigBee技术的RFID空间定位系统
中图分类号:TP391 文献标识码:A 文章编号:1009-2552(2009)09-0102-04 基于ZigBee技术的RFID空间定位系统 房淑芬 (辽宁省铁岭师范高等专科学校,铁岭112001) 摘 要:通过ZigBee mote与RFID reader结合的方式应用随机数定位算法展示了一种低能耗的基于Zigbee技术的R FID空间定位系统,使得对佩带了Zigbee mote的人可以实时进行定位。在本系统中,通过使用基于取样的表示方法,定位算法能够表示任意分布。通过将系统实现的算法与算法原型比较,可以发现在Non-Line-Of-Sight(NLOS)场景下,本算法的定位错误(positioning er-r ors)有明显改进。 关键词:RFI D;ZigBee;空间定位算法 RFID space location system based on ZigBee technology FANG Shu-fen (Tieling Normal C ollege of Liaoning Province,Tieling112001,China) Abstract:This paper presented a low energy cost RFID space location system based on Zigbee technology by using the combination of ZigB ee mote and R FID reader,and random sa mpling algorithm,by which a person holding an Zigbee mote can be located in real time.In this system,by using the representation based on random sa mpling,the location algorithm can represent ar bitrar y distribution.According to the comparison of the algorithm implemented in this system and the prototype algorithm,we it is concluded that the location err ors in this algorithm have been distinctly impr oved under the scenario of Non-Line-Of-Sight(NL OS). Key words:RFID;ZigBee;space location algorithm 0 引言 移动计算设备、无线技术和Inter net的飞速发展,促使人们对位置感知的服务系统越来越感兴趣。在许多应用中,都需要知道一个物体的确切位置。其中,GPS[1]是最著名,也是应用最广泛的定位系统,它被用来对户外移动的物体进行定位。对于室内的定位机制,有红外线[2]、超声波[3]、RFID[4]等等。 上面介绍了三种基于网络的定位机制。它们的共同点是采用固定的接收装置来接收佩带在人或物体上的发射装置发出的信息并将这些信息通过有线网络转发到控制中心。这些机制经常在一些跟踪系统中被采用。 红外线机制为每一个物体附带一个标签,这些标签周期性地通过红外线发射器发射自己的唯一的ID,固定的接收装置接收这些信息并通过有线网络将这些信息传到控制中心,通过这种方式来实现对室内物体的识别、定位。但是,这种机制存在两个缺点,首先它要求发射装置跟接收装置之间的光线不能被阻隔,另外,它要求在一个建筑内布置一个有线的网络以进行数据的传输。 超声波机制与红外线机制的区别就是把红外线换成了超声波。但是,由于目前超声波装置结构比较复杂,使得它的成本过高,目前还很难让大多数用户接受。RFID定位的典型系统是LANDMARC(Location identification based on dynamic active RFID calibra-tion)[4],它使用tags和r eaders来实现定位。这一系统的精确度随着所部署的tag的密度的增加而增加。但是部署太多的ta g是不实际的。 收稿日期:2009-02-10 作者简介:房淑芬(1965-),女,副教授,本科,研究方向为电子测量技术。 — 102 —
基于Zigbee技术的智慧农业解决方案
基于技术的智慧农业解决方案 一、智慧农业简介概述: 智慧农业从广义上讲包含了、、、等,智慧农业是将、等现代信息技术应用到农业生产、管理、营销等各个环节,实现农业智能化决策、社会化服务、精准化种植、可视化管理、互联网化营销等全程智能管理的高级农业阶段,是一种集物联网、移动互联网和云计算等技术为一体的新型农业业态,它不仅能够有效改善农业生态环境和提升农业生产经营效率,而且能够彻底转变农业生产者、消费者观念和组织体系结构。 所谓“智慧农业”就是充分应用现代信息技术成果,集成应用计算机与网络技术、物联网技术、音视频技术、3S技术、无线通信技术及专家智慧与知识,实现农业可视化远程诊断、远程控制、灾变预警等智能管理。 智慧农业是农业生产的高级阶段,是集新兴的互联网、移动互联网、云计算和物联网技术为一体,依托部署在农业生产现场的各种传感节点(环境温湿度、土壤水分、二氧化碳、图像等)和无线通信网络实现农业生产环境的智能感知、智能预警、智能决策、智能分析、专家在线指导,为农业生产提供精准化种植、可视化管理、智能化决策。 “智慧农业”是云计算、传感网、3S等多种信息技术在农业中综合、全面的应用,实现更完备的信息化基础支撑、更透彻的农业信息感知、更集中的数据资源、更广泛的互联互通、更深入的智能控制、更贴心的公众服务。“智慧农业”与现代生物技术、种植技术等高新技术融合于一体,对建设世界水平农业具有重要意义。 二、智慧农业系统技术特点: 智慧农业是物联网技术在现代农业领域的应用,主要有监控功能系统、监测功能系统、实时图像与视频监控功能。 (1)监控功能系统:根据无线网络获取的植物生长环境信息,如监测土壤水分、土壤温度、空气温度、空气湿度、光照强度、植物养分含量等参数。其它参数也可以选配,如土壤中的PH值、电导率等等。信息收集、负责接收无线传感汇聚节点发来的数据、存储、显示和数据管理,实现所有基地测试点信息的获取、管理、动态显示和分析处理以直观的图表和曲线的方式显示给用户,并根据以上各类信息的反馈对农业园区进行自动灌溉、自动降温、自动卷模、自动进行液体肥料施肥、自动喷药等自动控制。 (2)监测功能系统:在农业园区内实现自动信息检测与控制,通过配备无线传
ZigBee技术发展及其特点
第2章 ZigBee技术及协议分析 ZigBee技术的发展及其特点]1[ 长期以来,低成本、短距离、低传输率、低功率的无线通讯市场一直存在着。蓝牙(Bluetooth)技术的出现曾让玩具制造商、家庭自动化控制以及工业控制等业界从业者兴奋不已,尽管蓝牙技术有很多优点,但是高昂的价格和其存在的技术缺陷严重影响了这些厂商的使用意愿。对于工业控制、家庭自动化控制等领域而言,蓝牙技术过于复杂、功耗过大、距离近、组网规模达不到应用要求等,而工业自动化等领域对无线通信的需求越来越大。因此,经过人们的努力,于2004年正式推出了ZigBee协议规范。 “HomeRF Lite” 2004年(又称ZigBee2004)诞生,它是ZigBee的第一个规范,这使得ZigBee有了自己的发展基本标准。但是由于推出仓促存在很多不完善的地方,因此在2006年进行了标准的修订,推出了(又称ZigBee2006),但是该协议与是不兼容的。相较于做了很多修改,但是仍无法达到最初的设想,于是在2007年再次修订(称为ZigBee2007/PRO),能够兼容之前的ZigBee2006,并且加入了ZigBee PRO部分,此时ZigBee联盟更专注于以下三种应用类型的拓展:家庭自动化(HA)、建筑/商业大楼自动化(BA)以及先进抄表基础建设(AMI)。 随着ZigBee标准的完善以及各软件以及硬件厂商的不断努力,用于ZigBee开发的软硬件正趋于完善,ZigBee技术的实用化不断推进,其使用领域不断拓展。使ZigBee 技术在2004年就被列为当今世界发展最快、市场前景最广阔的十大高新技术之一。 ZigBee技术有以下几个方面的特点: (1)短时延。通信时延以及休眠状态激活时延都很短,通常在15ms至30ms间。 (2)高可靠性。采用了CSMA/CA(碰撞避免)机制,而且为需要固定带宽的通信业务预留了专用的时隙,从而避免了发送数据时可能出现的竞争和冲突;节点模块间有自动动态组网功能,信息在整个ZigBee网络中是通过自动路由方式传输的,这样可以保证信息的可靠传输。 (3)低数据率。数据传输率在10kb/s到250kb/s之间。 (4)低功耗。两节五号电池即可使用6个月至2年,免去了经常更换电池或者是充电的麻烦。 (5)低成本。ZigBee的低数据传输率,简单的协议,都大大降低了成本,而且ZigBee
基于Zigbee无线定位技术研究毕业论文
基于ZigBee的无线定位技术研究 摘要: 随着现代通信技术和无线网络的快速发展,人们对定位与导航的需求日益增大,尤其在复杂的室环境,但是受定位时间、定位精度以及复杂室环境等条件的限制,比较完善的封闭空间定位技术目前还无法很好地利用。本文的重点就在于设计并实现了一种低成本、实用的无线传感器定位系统。 本论文主要研究了基于ZigBee网络的室无线定位技术,它包括硬件平台、节点通信程序和上位机监测软件三部分。本文详细介绍了三部分的实现。其中,硬件平台以集成了射频与51微控制器的CC2430芯片为核心,该平台包括射频模块、辅助电路、功能指示电路等。 论文最后对定位系统进行了实际测试。测试表明:本系统达到了设计要求,是一个低成本、易实现的系统。 关键词:ZigBee 无线定位CC2430 Z-STACK
The Research Wireless localization Based on ZigBee Teacher:liu zhi (Changchun university of science and technology of electronic information engineering institute,060412225 wang meng) Abstract: With the rapid development of modern communication technology and wireless network,people's demand for positioning and navigation is increasing. Especially in complex indoor environments, but as the limitation of positioning time, positioning accuracy as well as the complexity of the indoor environment conditions, well-positioning technology is still unable to be used in an encloseure space. The combination of ZigBee technology and localization is one of the key researches. This paper, aiming at ZigBee network, investigates the indoor wireless location techniques and implements a real-time localization system. This paper achieves a localization system. three parts are included. They are hardware platform, communication program of nodes and PC monitor software. The achievement of every part is clear introduced in this paper. The core of hardware platform is CC2430 which is integrated by RF and 51 MCU, the localization nodes are designed and made. It includes RF module, auxiliary module and function indication circuits. In the end, practical test is implemented. This system is confirmed to be a
工业zigbee,解决方案
工业zigbee,解决方案 篇一:ZIGBEE无线智能家居最新解决方案-XX 无线智能家居系统最新解决方案 南京物联传感技术有限公司 一、智能化系统概述 什么是智能家居 “智能家居”,又称智能住宅。通俗地说,它是融合了自动化控制系统、计算机网络系统和网络通讯以及物联网技术于一体的安全化、网络化、智能化的家居控制系统。将家中的各种设备(如照明系统、电器控制系统、安防系统、远程医疗系统、环境络监控系统等)通过互联网和ZIGBEE局域网络连接到一起。与普通家居相比,智能家居不仅具有传统的居住功能,而且还提供更安全、更舒适、更便捷的宜人家庭生活空间;智能家居是以住宅为平台,利用网络、通信及控制技术管理家中设备。来创造一个高效、舒适、安全、便利、环保的居住环境。 智能家居的功能:远程、场景、定时、联动 远程:移动终端(手机、平板)通过互联网把指令发送至云服务器,云服务器在转发至网关,网关把互联网信号转换成ZIGBEE局域网信号在发送至对应的设备。只要终端有网络信号即可控制家中的任何设备。
场景:把多个设备添加到同一个触发键中。例如:回家之后需要开启灯光、空调、电视,关闭声光报警器、烟雾探测器、红外入侵探测器等。智能家居终端软件可以提供同时一键操作以上所有设备的功能即场景功能。 定时:场景设置好,要执行必须手动触发,定时之后就可以根据具体设定的时间自动触发,定时的方式和手机设置闹铃的方式相同。 联动:智能家居有传感器、控制器、APP构成。通过APP 设置只要传感器检测到相关信号之后控制器能自动执行相应的动作即联动。 二、项目需求 系统概述 一个舒适的家居环境应该对家居的照明、电器、安防、环境、健康、综合服务系统,使用业主通过简单的操作即可拥有轻松的生活环境和惬意的生活氛围,让生活变得更舒心、放心、省心。 本项目将遵循业主需求,并依照南京物联对于智能家居设计的六大基本原则,即L、S、A、E、H、O对居家各个功能区域进行详细而有系统的分析设计。 L—照明控制系统;(调光灯、LED灯泡、白炽灯、、、) S—安防控制系统;(燃气探测、烟雾报警、门窗磁、、、)
zigbee的系统结构和组网方式
简介 ZigBee是一种新兴的短距离、低功耗、低数据传输速率的无线网络技术,它是一种介于无线标记技术和蓝牙之间的技术方案。ZigBee是建立在IEEE802.15.4标准之上,它确定了可以在不同制造商之间共享的应用纲要。IEEE802.15.4标准定义了ZigBee协议的PHY层和MAC层。PHY层规范确定了在2.4GHz(全球通用的ISM频段)以250kb/s的基准传输率工作的低功耗展频无线电以及另有一些以更低数据传输率工作的915MHz(北美的ISM频段)和868MHz(欧洲的ISM频段)的实体层规范。MAC层规范定义了在同一区域工作的多个IEEE802.15.4无线电信号如何共享空中通道。 为了促进ZigBee技术的发展,2001年8月成立了ZigBee联盟,2002年下半年,英国Invensys公司、日本三菱电子公司、美国摩托罗拉公司以及荷兰飞利浦半导体公司四大巨头共同宣布,它们将加入“ZigBee联盟”,目前该联盟已经有150多家成员,以研发名为ZigBee的下一代无线通信标准。 正如前面所述,ZigBee不仅仅只是802.15.4的名字,IEEE802.15.4仅处理低级MAC层和PHY层协议,所以ZigBee联盟对其网络层协议和API进行了标准化,还开发了安全层,以保证这种便携设备不会意外泄漏其标识。 ZigBee的组成和构网方式 1.FFD和RFD 利用zigbee技术组件的无线个人区域网(WPAN)是一种低速率的无线个人区域网(LR WPAN),这种低速率个人区域网的网络结构简单、成本低廉,具有有限的功率和灵活的吞 吐量。 在一个LR WPAN网络中,可同时存在两种不同类型的设备,一种是具有完整功能的设备(FFD),另一种是简化功能的设备(RFD)。 在网络中,FFD通常有3中工作状态:(1)作为个人区域网络(PAN)的主协调器;(2) 作为一个普通协调器;(3)作为一个终端设备。FFD可以同时和多个RFD或其他FFD通信。 而RFD则只用一种工作状态即作为一个终端设备,并且一个RFD只能和一个FFD通信。2.ZigBee的体系结构 ZigBee体系结构主要有物理(PHY)层、媒体接入控制(MAC)层、网络/安全层以及应用框架层构成,如下图所示:
zigbee解决方案比较
Zigbee 解决方案总结 一.非开源协议栈 1.freescale 解决方案 协议栈种类: 1.1 80 2.15.4标准mac 1.2 SMAC 1.3 SynkroRF 1.4 ZigBee RF4CE 1.5 ZigBee 2007 最简单的就是SMAC,是面向最简单的点对点应用的,不涉及网络的概念; 其次是IEEE802.15.4,一般用来组建简单的星型网络,而且提供了源代码,可以清楚地看到网络连接的每个步骤,分别调用了哪些函数; BeeStack(符合zigbee 2007)是提供的最复杂的协议栈,但是看不到代码,它提供给你一些封装好的函数,比如创建网络函数,你直接调用它,协调器就把网络创建好了,终端节点调用它则寻找可以加入的ZigBee网络并尝试加入。 其中硬件平台可以为下面中的任一种: MC13202 (2.4 GHz射频收发器) MC13213 (2.4 GHz射频收发器和带60K闪存的8位MCU)MC13224V (2.4 GHz平台级封装(PIP) –带有128KB闪存、96KB RAM、80KB ROM的32位TDMI ARM7处理器) MC13233 (带有HCS08 MCU的2.4 GHz片上系统) MC13202没有自带mcu,在做应用时,需要用户在自己的扩展板上加上mcu,既需要实现对外围设备的底层控制,也需要实现
协议栈。下面的几种均有自带mcu,协议栈的实现在自带的mcu 上实现,功能较简单的可直接使用片上的mcu资源进行控制;功能复杂的应用,最好协议栈实现与外围控制分开,大多数应用都选择arm芯片作为控制芯片; 详细信息可以查看https://www.360docs.net/doc/d07613131.html,/products/rf/ZigBee.asp 2.microchip 解决方案 协议栈种类: ZigBee? Smart Energy Profile (SEP) Suite ZigBee? PRO ZigBee? RF4CE 均是一整套的协议集,价格不菲; 硬件平台: Pic18(mcu)+MRF24J40(2.4GHZ 射频收发器)+天线 与freescale 的mc13202相似,MRF24J40也只是射频收发器,不包含mcu,协议栈的实现需要借助于外围的mcu,当然微芯公司选择的是pic18及以上的芯片作为其主控mcu,通过spi接口与MRF24J40通信,查询其寄存器的状态,实现协议栈功能。 详见:https://www.360docs.net/doc/d07613131.html,/ 3.ST 意法半导体解决方案 协议栈: EMZNET ZigBee? protocol stack 硬件平台:
基于Zigbee无线定位技术研究
基于Zigbee无线定位技术研究
基于ZigBee的无线定位技术研究 摘要: 随着现代通信技术和无线网络的快速发展,人们对定位与导航的需求日益增大,尤其在复杂的室内环境,但是受定位时间、定位精度以及复杂室内环境等条件的限制,比较完善的封闭空间定位技术目前还无法很好地利用。本文的重点就在于设计并实现了一种低成本、实用的无线传感器定位系统。 本论文主要研究了基于ZigBee网络的室内无线定位技术,它包括硬件平台、节点通信程序和上位机监测软件三部分。本文详细介绍了三部分的实现。其中,硬件平台以集成了射频与51微控制器的CC2430芯片为核心,该平台包括射频模块、辅助电路、功能指示电路等。 论文最后对定位系统进行了实际测试。测试表明:本系统达到了设计要求,是一个低成本、易实现的系统。 关键词:ZigBee 无线定位CC2430 Z-STACK
The Research Wireless localization Based on ZigBee Teacher:liu zhi (Changchun university of science and technology of electronic information engineering institute,060412225 wang meng) Abstract: With the rapid development of modern communication technology and wireless network,people's demand for positioning and navigation is increasing. Especially in complex indoor environments, but as the limitation of
zigbee智能主机,解决方案
zigbee智能主机,解决方案篇一:Zigbee智能家居整体方案 Zigbee智能家居整体方案 一、智能家居简介 智能家居是以互联网为核心最终实现的家居互联,将家中各种设备连接到一起,提供家电控制、照明控制、窗帘控制、防盗报警、环境监测、三表抄送等多种功能和手段。构建高效的住宅设施与家庭日程事务的智能管理系统,提升家居安全性、便利性、舒适性、艺术性,并实现环保节能的居住环境。二、智能家居系统组成 1. 照明系统 实现对全宅灯光的智能管理,可以用遥控等多种智能控制方式实现对全宅灯光的遥控开关,调光,全开全关及“会客、影院”等多种一键式灯光场景效果的实现。并可用定时控制、电话远程控制、手机控制等多种控制方式实现功能,从而达到智能照明的节能、环保、舒适、方便的功能。 另一方面与窗帘自动控制系统结合,实现室内自动调光,根据室外天气情况自动开关窗。 (1) 控制:就地控制、多点控制、遥控控制、区域控制等; (2) 安全:通过弱电控制强电方式,控制回路与负载回路分离;
(3) 简单:智能灯光控制系统采用模块化结构设计,简单灵活、安装方便; (4) 灵活:根据用户的不同需求,只需做软件修改设置就可以实现灯光布局的改变和功能扩充。 2. 电器控制系统 电器控制采用弱电控制强电方式,即安全又智能,可以用遥控、定时等多种智能控制方式实现对在家里电视、空调、饮水机、插座、地暖、投影机、新风系统等进行智能控制。 系统可以做到让客厅、餐厅、卧室等多个房间的电视机共享家庭影音库,并可以通过遥控器选择自己喜欢的音源进行观看。避免饮水机在夜晚反复加热影响水质,在外出时断开插排通电,避免电器发热引发安全隐患。以及对空调地暖进行定时或者远程控制,让您到家后马上享受舒适的温度和新鲜的空气。 (1) 方便:手机控制、就地控制、场景控制、遥控控制、电话电脑远程控制等; (2) 控制:通过红外或者协议信号控制方式,安全方便不干扰; (3) 健康:通过智能检测器,可以对家里的温度、湿度、亮度进行检测,并驱动电器设备自动工作; (4) 安全:系统可以根据生活节奏自动开启或关闭电
基于Zigbee的无线定位系统
创新创业训练计划 项目结题报告 项目编号: 项目名称:智能搜狗 项目级别: 项目负责人: 项目类型: 创新训练 创业训练 创业实践指导教师: 所在学部学院: 教务处制
大连理工大学大学生创新创业训练计划 项目原创性声明 本人郑重声明:所呈交的项目结题报告以及所完成的作品实物等相关成果,是本人和项目组其他成员独立进行研究工作所取得的成果。除文中已经注明引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写过的作品成果,不侵犯任何第三方的知识产权或其他权利。本人完全意识到本声明的法律结果由本人承担。 项目负责人签名: 年月日 项目指导教师审核签名: 年月日
智能搜狗Intelligent Searching
摘要 今年来,随着人们生活水平的提高,人们对日常生活中一些重要的物品或者是家里养的宠物等可移动事物的实时位置尤为关心,希望随时随地都能知道其具体方位,但是现有的GPS技术还未全面普及,价格依然很昂贵,所以,本项目着重研究利用低成本硬件设备实现实时定位的功能,将无线定位技术带入人们生活的方方面面。 通过前期的调查研究,我们发现现在市场上的定位装置价格普遍昂贵,而且功耗较高,本项目利用ZIGBEE模块的低成本、低功耗的特点很好的解决了这些问题。 关键词:无线定位;ZIGBEE
Abstract In recent years,with the development of people’s living standard,people place more attention on the real-time position of something important or mobilizable at home like pets,they want it to be capable that they can attain the specific position of the object at anytime and anywhere.But the GPS has not been popularized,and the price is still very high.Therefore,our project is to do some research to find how to achieve real-time positioning with low-cost hardware,and bring wireless positioning technology into people’s daily life. According to the early investigation,we found that the positioning devices in the market are generally very expensive and have high consumption of energy.Our project is to use the low-cost ZIGBEE module with low power consumption to solve these problems. Key Words:Wireless Positioning;ZIGBEE
ZigBee智能照明系统解决方案
ZigBee智能照明系统解决方案 一、概述 面向能源管理、商业和消费应用产品创造无线解决方案的全球企业联盟ZigBee联盟(ZigBee Alliance)宣布,ZigBee Light Link标准已经制定与认证完成。未来照明产业将能够拥有一项由广泛的企业联盟提供支持的开放性全球标准,为全球一些最高效LED照明解决方案提供无线控制功能。ZigBee Light Link是透过单一网路控制不同品牌厂商的照明产品,并且同时能与多元频段的电脑、智能型手机和平板电脑连结,有助于相关供应链的发展,以及加速推动智慧化照明与控制设备。因此采用ZigBee Light Link的节能灯泡、LED灯具、感应器、定时器、遥控器与开关将能够很方便的接入网路,并且无需添加任何装置进行调整。能够很轻松随插即用,并以其它装置无线控制照明装置。 目前基于ZigBee Home Automation(家庭自动化)和ZigBee Light Link的ZigBee产品可与ZigBee3.0互操作。 二、方案介绍 四信基于ZigBee Light Link协议的灯控制方案,采用智能灯控系统取代传统手动式单节点开关,灵活对灯光进行智能化的集中管理。满足不同场合对灯光控制的需求,通过软件系统自定义多种场景控制模式、设定时间自动控制。在能源控制、管理等方面,最终为客户提供高度可靠、安全、低功耗和低成本的灯控解决方案。 ZigBee Light Link技术为下一代照明应用,提供易于使用且直觉性的操作界面连结标准。为您解决照明节能控制解决方案,快速驾驭新市场。内建ZigBee 无线通讯模组的照明灯具,让LED照明或其它节能照明获得更高附加价值的动力。
Zigbee无线联网解决方案
基于ZigBee网络的无线联网解决方案 【摘要】本测试是针对没有以太网接口的PLC无线联网解决方案。ZigBee模块连接PLC的485端口,通过紫蜂协议收发数据,自动联网,可以点到点或广播模式,最长距离可以达到2km,模 块价格较低,是短距离无线联网的高性价比解决方案。PLC仅仅需要普通的Modbus主从模式通 讯即可,无需其他配置和附件。 关键词:ZigBee,紫蜂协议,超级终端,485通讯,点到点,广播,频段,PLC 1.ZigBee简介(百度百科) ZigBee协议适应无线传感器的低花费、低能量、高容错性等的要求。Zigbee的基础是IEEE 802.15.4。但IEEE仅处理低级MAC层和物理层协议,因此Zigbee联盟扩展了IEEE,对其网络层协议和API进行了标准化。Zigbee是一种新兴的短距离、低速率的无线网络技术。主要用于近距离无线连接。它 有自己的协议标准,在数千个微小的传感器之间相互协调实现通信。这些传感器只需要很少的能量,以接 力的方式通过无线电波将数据从一个传感器传到另一个传感器,所以它们的通信效率非常高。Zigbee是一 个由可多到65000个无线数传模块组成的一个无线数传网络平台,十分类似现有的移动通信的CDMA网或GSM网,每一个Zigbee网络数传模块类似移动网络的一个基站,在整个网络范围内,它们之间可以进行 相互通信;每个网络节点间的距离可以从标准的75米,到扩展后的几百米,甚至几公里;另外整个 Zigbee网络还可以与现有的其它的各种网络连接。 通常,符合如下条件之一的应用,就可以考虑采用Zigbee技术做无线传输:需要数据采集或监控的网点多;要求传输的数据量不大,而要求设备成本低;要求数据传输可靠性高,安全性高;设备体积很小, 不便放置较大的充电电池或者电源模块;电池供电;地形复杂,监测点多,需要较大的网络覆盖;现有移 动网络的覆盖盲区;使用现存移动网络进行低数据量传输的遥测遥控系统;使用GPS效果差,或成本太高 的局部区域移动目标的定位应用。 ZigBee联网的缺点是信号传输对于空间洁净度要求较高,任何实体在站点之间都会影响到信号的接收,如果阴天下雨等气候变化也会影响信号传输,因此应用ZigBee设备联网时需要注意系统的安装环境。 2. 为什么选择ZigBee联网 ZigBee技术在数据采集及物联网领域已经广泛应用,在OEM客户中,有些应用场合与物联网的应用 是相似的,比如物流行业、仓储、空调、起重等,这些场合通常不方便布设有线网络,用wifi联网会有成 本压力,要么需要PLC有以太网接口,要么需要网管设备,这样的应用场合中ZigBee设备就显示了它的 独特优势。
无线定位技术对比RFID UWB ZIGBEE
RFID是射频识别技术的英文(Radio Frequency Identification)的缩写,射频识别技术是20世纪90年代开始兴起并逐渐走向成熟的一种自动识别技术,射频识别技术是一项利用射频信号通过空间耦合(交变磁场或电磁场)实现无接触信息传 递并通过所传递的信息达到识别目的的技术。一般是基于RSSI来进行区域性感知,目前,RFID技术在工业自动化、物体跟踪、交通运输控制管理、防伪和军事用途方面已经有着广泛的应用。RFID系统的工作原理: RFID 读卡器 针对监狱系统的特殊情况,我们采用的RFID 阅读器的工作模式为“被动式”,正常工作时阅读器处于接收状态,实时接收电子标签发出的信号,并将接收到的数据转送到后台管理系统中。在可视环境下,最大识别距离(通讯距离)可以达到80米。在具体应用中与无源标签相比较,超长的识别距离具有非常大的优势。当用户对识别距离的长短有不同要求,或应用环境比较复杂时,可以通过设置阅读器上的衰减开关来调节并设定识别距离。 RFID 有源定位标签 采用“主动(active)方式“进行工作,主动发射信号给阅读器。 该方式工作时消耗的能量相对比较高,因此,我们在标签内部增加了高能电池,用来为标签提供能量。标准环境下,电池提供的能量可以保证标签连续工作1年左右。工作频率标签工作频率范围是2.4GHz ~ 2.485GHz,属于微波频段。目前,小功率设备可以自由使用该频段进行工作,不需要向管理部门申请和缴付任何费用。
超宽带(UWB)是射频应用技术领域的一项重大突破。Ubisense 公司利用该技术构建了革命性的实时定位系统(RTLS),该系统能够在传统的挑战性应用环境中达到较高的定位精度,并具有很好的稳定性;而诸如RFID、WiFi等技术并不能完成该类应用。超带宽(UWB)是射频应用技术领域的一项重大突破,改系统能够在传统环境中达到较高的定位精度,并具有很好的稳定性,创造了RTLS领域的新格局。 1,UWB与其他定位技术的优势 射频技术发展趋势 以往基于场强信号和信号质量技术来定位的RFID,WIFI,ZIGBEE等传统定位技术,定位精度往往不能令人满意,UWB定位技术的出现填补了高精度定位领域的空白。 定位传感器 它包含一个天线阵列,以及UWB 信号接收器;可以通过检测定位标签发出的UWB 信号,来计算该标签的实际位置。在工作过程中,每个传感器独立测定UWB 信号的方向角和仰角(AOA);而到达时间差信息(TDOA)则必须由一对传感器来测定,而且这两个传感器均部署了时间同步线;这种独特的AOA、TDOA相结合的测量技术,可以构建灵活而强大的定位系统。目前Ubisense 单个传感器能测得较为准确的标签位置;而通过两个传感器的接收信号能测定更为精密的3D 信息;传感器的这种特性大大降低了系统部署的硬件开销,显著改善了系统的稳定性与可靠性。 定位标签