六足移动式微型仿生机器人的研究(1)

文章编号:100220446(2002)0520427205
六足移动式微型仿生机器人的研究Ξ
徐小云 颜国正 丁国清 刘 华 付 轩 吴 岩
(上海交通大学信息检测技术及仪器系 上海 200030)
摘 要:本文描述了一种微型六足仿生机器人的结构与控制,分析了这种微型六足仿生机器人的移动原理.
该机器人基于仿生学原理,结构独特、简单、新颖,能方便地实现前进和后退,其样机外形尺寸为:长30mm,宽40mm,高20mm,重6.3g.并对该样机进行了实验,实验结果表明该机器人具有较好的机动性.
关键词:六足机器人;仿生机器人;连杆曲线图谱;步态
中图分类号: T P24 文献标识码: B
RESEARCH ON M IN I ATURC HEXAPOD B I O-ROB OT XU X iao2yun YAN Guo2zheng D I N G Guo2qing L I U H ua FU Xuan W U Yan
(D ep a rt m en t of Inf or m a tion D etecting T echnology and Instrum en t,S hang ha i J iaotong U n iversity,S hang ha i200030)
Abstract:T h is paper fo r describes the structure and contro l of a new k ind of m iniaturc hexapod bi o2robo t,ana2 lyzes the moving p rinci p les fo r robo t.T he robo t is based on the p rinci p les of bi onics,its structure is si m p le,design novel and unique.It can move fo r w ards and backw ards.T he external di m ensi ons of bi o2robo t is:length30m il2 li m eter,w idth40m illi m eter,heigh t20m illi m eter,w eigh t6.3gram.Som e tests about the model robo t are m ade, the experi m ental results show that the robo t has good mobility.
Keywords:hexapod robo t,bi onic robo t,link curve atlas,gait
1 引言(I n troduction)
近年来,为实现生产过程自动化,已有不少操作机器人广泛应用于工厂的各个生产过程,尤其是那些人力所限和人所不及的外部环境或危险场所,将是机器人进一步发展的应用领域.
移动机器人中轮式或履带式移动方式已获得广泛的应用,但是足式移动方式具有轮式和履带式移动方式所没有的优点,足式移动方式的机器人可以相对较易地跨过比较大的障碍(如沟、坎等),并且机器人的足所具有的大量的自由度可以使机器人的运动更加灵活,对凹凸不平的地形的适应能力更强.足式移动机器人的立足点是离散的,跟地面的接触面积较小,可以在可达到的地面上选择最优支撑点,即使在表面极度不规则的情况下,通过严格选择足的支撑点,也能够行走自如,因此,足式步行机器人的研究已成为机器人学中一个引人注目的研究领域,特别是微型机器人,现已成为国际科技界的一个热点——微电子机械系统(M E M S)研究开发的重要分支.它在军事国防、生物医学、航空航天、工业农业等领域都有广泛的应用前景.
基于仿生学原理、本文利用六套并联平面四连杆机构、微型直流电动机及相应的减速增扭机构研制了体积微小、具有良好的机动性、灵活性及对环境适应能力强的“微型六足仿生机器人”.该机器人长为30mm,宽为40mm,高为20mm,重约6.3g.这种足式移动微型机器人配备相应的传感器和作业装置,可用于工农业生产的许多方面(核工业中的管道裂缝检测、工农业设备的探测和检修等等).
2 微型六足仿生机器人的原理及构造(Pr i n-
c iple an
d structur
e o
f m i n i a turc hexapod
b io-robot)
2.1 微型六足仿生机器人的运动原理
“六足纲”昆虫(蟑螂,蚂蚁等)在步行时把六条足分为两组,以一边的前足,后足与另一边的中足为一组,形成一个三角架支撑虫体,因此在同一时间只
第24卷第5期2002年9月机器人 ROBO T V o l.24,N o.5
Sep t.,2002
Ξ基金项目:上海市曙光计划资助项目.
收稿日期:2002-04-02
有一组的三条足起行走作用:前足用爪固定物体后拉动虫体前进,中足用以支撑并举起所属一边的身体,后足则推动虫体前进,同时使虫体转向,行走时虫体向前并稍向外转,三条足同时行动,然后再与另一组三条足交替进行,这样行走的轨迹线是一条锯齿状曲线.
本文所设计的机器人的步态[1]如图1所示
:
图1 微型六足仿生机器人步态示意图
F ig .1 T he sketch m ap of m iniaturc hexapod
bi o 2robo t ′s gait
机器人开始运动时,左侧的2号腿和右侧的4、6
号腿抬起准备向前摆动,另外三条腿1、3、5处于支撑状态,支撑机器人本体确保机器人的原有重心位置处于三条支撑腿所构成的三角形内,使机器人处于稳定状态不至于摔倒(见图1(a )),摆动腿2、4、6向前跨步(见图1(b )),支撑腿1、3、5一面支撑机器人本体,一面在小型直流驱动电机和皮带传动机构的作用下驱动机器人本体,使机器人机体向前运动一个半步长S (见图1(c )).
在机器人机体移动到位时,摆动腿2、4、6立即放下,呈支撑态,使机器人的重心位置处于2、4、6三条支撑腿所构成的三角形稳定区内,原来的支撑腿1、3、5已抬起并准备向前跨步(见图1(d )),摆动腿1、3、5向前跨步(见图1(e )),支撑腿2、4、6此时一面支撑机器人本体,一面驱动机器人本体,使机器人机体向前运动一个步长S (见图1(f )),如此不断从步态(a )、(b )、(c )、(d )、(e )、(f )、(a ),循环往复,周而复始实现机器人不断向前运动.
2.2 微型六足仿生机器人的结构
图2所示为本文所设计和制作的微型六足仿生机器人的结构简图.由图2可知,该微型仿生机器人
由小型直流驱动电机(其规格为Υ6×12mm ),蜗轮蜗杆减速机构,皮带传动机构,六套平面四连杆机构等组成
.
图2 微型六足仿生机器人的结构简图
F ig .2 Structure sketch of m iniaturc hexapod bi o 2robo t
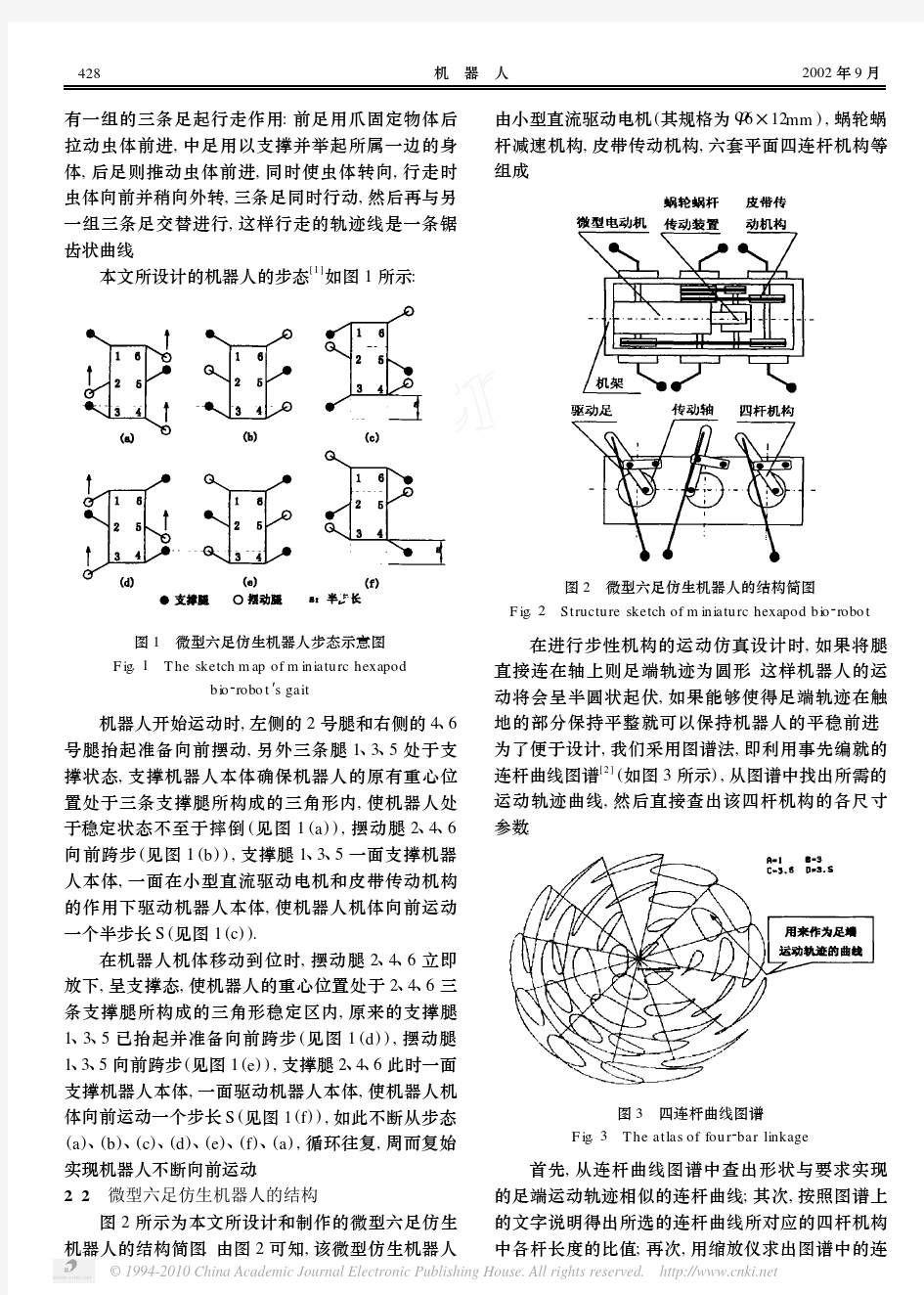
在进行步性机构的运动仿真设计时,如果将腿
直接连在轴上则足端轨迹为圆形.这样机器人的运动将会呈半圆状起伏,如果能够使得足端轨迹在触地的部分保持平整就可以保持机器人的平稳前进.为了便于设计,我们采用图谱法,即利用事先编就的连杆曲线图谱[2](如图3所示),从图谱中找出所需的运动轨迹曲线,然后直接查出该四杆机构的各尺寸参数
.
图3 四连杆曲线图谱
F ig .3 T he atlas of four 2bar linkage
首先,从连杆曲线图谱中查出形状与要求实现的足端运动轨迹相似的连杆曲线;其次,按照图谱上的文字说明得出所选的连杆曲线所对应的四杆机构中各杆长度的比值;再次,用缩放仪求出图谱中的连
824 机 器 人2002年9月
杆曲线和所要求的足端运动轨迹之间相差的倍数,并由此确定所求四连杆机构中各杆的真实尺寸;最后,根据连杆曲线上的小圆圈与铰链B ,C 的相对位置,即可确定描绘轨迹之点在连杆上的位置.
本文所设计的仿生机器人的步距为3mm ,所选的用来作为机器人足端运动轨迹的曲线(见图3)的平坦部分(即机器人运动时足端触地的部分)的长度约为3mm ,由此可以确定平面四连杆机构中各个杆件的长度为:曲柄A =1mm 、连杆B =3mm 、摇杆C =3.5mm 、固定杆D =3.5mm .
3 微型六足仿生机器人稳定性分析及其倒立摆模型(The stab il ity ana lysis of m i n i a -turc hexapod b io -robot and its i nverted pendulu m m odel i ng )
3.1 稳定性分析[3]
如图4所示:点A 、B 、C 分别是六足机器人的左前腿、右中腿、左后腿在地面上的支撑点.三角形
A B C 是由三条支撑腿所构成的一组支撑三角形
.取机器人本体的重心O 为坐标原点,y 的正方向为机器人的前进方向,设支撑点A 、B 、C 的水平坐标分别为A (x A ,y A )、B (x B ,y B )、C (x C ,y C ),各点的z 坐标都相同,点A ′、B ′、C ′是机器人重心到支撑三角形各边的垂足点,d 1、d 2、d 3是重心到各边的相应的距离
.图4 三角步态稳定裕量计算图
F ig .4 Calculating chart fo r tri pod gait ′s
stable th resho ld li m it
直线A B 的方程为
y =
y A -y B
x A -x B
(x -x A )+y A 斜率K A B =
y A -y B
x A -x B
,则直线OA ′的斜率K OA ′=
x A -x B
y B -y A
.其直线方程为:y =
x A -x B
y B -y A
x ,以上两直线A B 和OA ′
的交点A ′的坐标为A ′
(x A y B -y A x B )(y B -y A )
d 2
A B ,
(x A y B -y A x B )(x A -x B )
d 2
A B
式中d 2
A B 是线段A B 的距离的平方
.线段OA ′长:d 1=
x 2A ′+y 2
A
′,同理可以求得d 2,
d 3.
则六足机器人以三角步态行走时,其最小稳定裕量判据为
d =m in{d 1,d 2,d 3}3.2 倒立摆模型
由于本文所设计的机器人采用三角步态,在任何时刻,同组的三条腿一起运动,三条腿的动作几乎完全一致,可以等效为一条腿[4],其模型如图5所示.
图5 六足机器人腿的倒立摆运动模型
F ig .5 Inverted pendulum modeling of
the hexapod robo t ′s leg
为了便于分析,本文假定机器人的质量集中于
腿(连杆)的一端,并且机器人的腿(连杆)不计质量.如图5所示:M 是作用在机器人上面的驱动力矩,F x 和F y 是地面作用于机器人支撑腿上的反作用力,g 是重力加速度,l 是腿(连杆)长,Η是机器人支撑腿与地面在水平方向上的夹角,由此得出下式
m x β=F x
m y
β=F y -m g I Ηβ
=F x sin Η-
F y l co s Η+M
(1)
式中:
x =l co s Ηy =l sin.q
代入式(1)并化简可以得到如下式
所示的机器人运动数学模型
I -l sin Ηl co s Ηm l sin Η10
-m l co s Η
01
Η
βF X F Y
=M
-m l co s ΗΗ
α2
-m l sin ΗΗα2
+m g
由此模型可以得到如图6、7所示的机器人在行走时
9
24第24卷第5期徐小云等: 六足移动式微型仿生机器人的研究
腿和地面的接触力的仿真结果
.
图6 水平方向上的接触力F ig .6 T he ho rizontal contact fo rce
图7 垂直方向上的接触力
F ig .7 T he vertical contact fo rce
4 微型六足仿生机器人的驱动与控制(The
dr ive and con trol of m i n i a turc hexapod
b io -robot )
4.1 微型六足仿生机器人的电机驱动电路
本文设计的微型六足仿生机器人的驱动源采用
日本制造的小型直流驱动电机,控制方案使用PC 机+控制箱进行直接控制.电机驱动电路由串行接口、串行2并行转换器、74L S 373锁存器、DA C 0832、集成运放组成,如图8所示
.
图8 电机驱动电路原理图
F ig .8 Schem atic drve circuit diagram of mo to r
采用串行口作为数据通讯线路,将由程序控制
部分产生的指令转化为一系列的二进制数输出,经过串行2并行转换器转变为所需要的并行数字信号.数字信号经74L S 373锁存器锁存,使得控制信号在下一个命令到来之前能够保持不变.锁存信号作为DA C 0832的数字信号输入端,DA C 0832利用计算机内部标准电源(±5V )作为参考电源,将数字信号转换为模拟信号.为了保证电机的驱动功率,在模拟信号输出端加上由多级运算放大器组成的功率放大部分,提供直流电机的电流,而电压采用由DA C 0832输出模拟电压直接驱动.至此,将由程序控制产生的控制信号,经过串并行转换、数模转换、功率放大,以驱动直流电机,从而完成机器人的运动,机器人的运动方向(前进、后退)由驱动电压的极性来控制.4.2 微型六足仿生机器人的步行速度的控制
由公式[5]n =U a -I a (R a +R ij
C e Υ
)可以看出电机的调速方法有三种:(1)改变电机的端电压U a ,也就是改变电枢电源电压;(2)在电枢回路中串联调节电阻
R tj ;(3)改变磁通Υ
.对于第二种调速方法,加入串联调节电阻R tj 后的电机转速总是比原来低,因此这种方法只能将转速往低调.另外当电枢电流I a 较小时,加入电阻R tj 后的电压变化不大,电机转速变化也不大,这种方法不宜采用.对于第三种调速方法,由于电枢回路中的电气时间常数较大,这种调速方法有一定的滞后,即调速的快速性较差.本文设计的机器人采用第一种调速方法,通过软件控制串行口输出一串二进制数到DA 转换器,经DA 转换后得到电机运转所需的直流电压后实现对仿生机器人运动的控制.不同的二进制数可以得到不同的电压,从而机器人的运动速度也不一样.
5 微型六足仿生机器人控制软件的设计(Con trol
sof tware design i ng of m i n i a turc hexapod
b io -robot )
机器人控制界面的设计是这一部分的一大重
034 机 器 人2002年9月
点.一个好的控制界面可以给使用者带来极大的方便,帮助了解机器人的运动状态,方便直观地控制机器人的运动.本文的控制界面采用V isual C ++语言编程.整个控制是基于W indow s 平台下进行的,在程序设计过程中,主要采取了两大部分的设计:步态控制部分和仿真部分.在控制部分中使用V isual C ++提供的A pp W izard 建立一个普通的程序框架,使用游标控件控制电机的转速,从而控制机器人的爬行速度,在控制与仿真之间采用了时钟控件,使得控制部分的命令在实际中和电脑仿真中同步.程序流程图和控制与仿真界面分别如图9、10(略)所示
.
图9 程序流程图
F ig .9 P rogram flow diagram
6 微型六足仿生机器人的实验结果及分析
(Exper i m en ta l result and its ana lysi ng )
根据前面所述的原理和设计方案,制作了仿生机器人的样机,其基本结构尺寸为:长30mm ,宽40mm ,高20mm ,重6.3g .整个仿生机器人的实物如图11所示.
对样机的测试结果显示机器人运动平稳,其步行速度达到3mm s ,即每秒一步,但会在运动一段时间后在原地停滞一小段时间,而且机器人的重心轨迹也不是直线而是类似于波浪形的曲线,与理论上的轨迹曲线有一定的偏差.分析其原因主要是由于(1)皮带轮打滑带来的相位差累积到一定程度后,两组足之间的相位差不是180°所造成的.(2)零件的加
工误差特别是连杆的加工误差所引起的.连杆的加
工误差导致机器人运动时各足轨迹不一致,进而导致行进路线出现偏差
.
图11 微型六足仿生机器人实物照片
F ig .11 T he pho to of m iniaturc hexapod bi o 2robo t
7 结论(Conclusion )
基于仿生学原理,在分析六足昆虫运动机理的基础上,利用连杆曲线图谱确定了用做机器人行走机构的平面四连杆的尺寸,采用微型直流电机,蜗轮蜗杆减速机构,皮带传动机构,本文研制成一种新型“微型六足仿生机器人”,并对该机器人样机进行了实验,实验结果表明该机器人具有较好的机动性.
下一步的工作包括:在驱动电路中拟增加形状记忆合金丝的驱动电路,利用形状记忆合金丝驱动机器人,实现更复杂更灵活的步态.
参考文献 (References )
[1]陈佳品,程君实,冯萍,马培荪等.四足机器人对角小跑步态的研
究.上海交通大学学报,1997,31(6):18-23
[2]李学荣,应瑞森,付俊庆,朱桥编制.连杆曲线图谱.重庆出版社[3]蒋新松主编.机器人学导论.辽宁科学技术出版社
[4]K S L ian ,L egged Robo t .Intelligent System s fo r the 21st Centu 2
ry .IEEE Internati onal Conference on System s ,M an and Cyber 2netics ,1995,2:1297-1302
[5]陈隆昌主编.控制电机.西安电子科技大学出版社
作者简介:
徐小云(19742),男,浙江人,上海交通大学电子信息学院
在读博士生.研究领域:微特机器人,多机器人分布式智能控制.
颜国正(19612),男,湖南人,上海交通大学电子信息学院
博士生导师,电子信息学院信息检测技术及仪器系系主任.研究领域:微型机器人,特种机器人,人工智能领域.
1
34第24卷第5期徐小云等: 六足移动式微型仿生机器人的研究
仿生六足机器人中期报告
编号: 哈尔滨工业大学 大一年度项目中期检查报告 项目名称:仿生六足机器人 项目负责人:学号 联系电话:电子邮箱: 院系及专业:机电工程学院 指导教师:职称: 联系电话:电子邮箱: 院系及专业:机电工程学院 哈尔滨工业大学基础学部制表 填表日期:2014 年 6 月28 日
一、项目团队成员(包括项目负责人、按顺序) 二、指导教师意见 三、项目专家组意见
四、研究背景 1.研究现状 4.1国内研究现状 随着电子技术发展,计算机性能的提高,使多足步行机器人技术进入了基于计算机控制的发展阶段。其中有代表性的研究为1993年,美国卡内基-梅隆大学开发出有缆的八足步行机器人DANTE,图1所示,用于对南极的埃里伯斯火山进行了考察,其结构由2个独立的框架构成。这一阶段研究的重点在于机器人的运动机构的设计、机器人的步态生成与规划及传统的控制方法在机器人行走运动控制过程的应用。Boston Dynamics公司的Big Dog四足机器人用于为军队运输装备,其高3英尺,重165磅,可以以3.3英里的速度行进,其采用汽油动力。 图1 Adaptive Suspension Vehicle 图2 Odex1步行机器人 图3 MIT腿部实验室的四足和双足机器人图4 DANTE步行机器人 由于新的材料的发现、智能控制技术的发展、对步行机器人运动学、动力学高效建模方法的提出以及生物学知识的增长促使了步行机器人向模仿生物的方向发展。 4.2国外研究现状 我国步行机器人的研究开始较晚,真正开始是在上世纪80年代初。1980年,中国科学院长春光学精密机械研究所采用平行四边形和凸轮机构研制出一台八足螃蟹式步行机,主要用于海底探测
仿生机器人关键技术
仿生机器人关键技术 “仿生机器人”是指模仿生物、从事生物特点工作的机器人。,涉及到机械设计、计算机、传感器、自动控制、人机交互、仿生学等多个学科。因此,机器人领域中需要研究的问题非常多。主要研究问题包括以下五个方面: 1 建模问题 仿生机器人的运动具有高度的灵活性和适应性。其一般都是冗余度或超冗余度机器人,结构复杂,运动学和动力学模型与常规机器人有很大差别,且复杂程度更大。为此,研究建模问题,实现机构的可控化是研究仿生机器人的关键问题之一。 2 控制优化问题 机器人的自由度越多,机构越复杂,必将导致控制系统的复杂化。复杂巨系统的实现不能全靠子系统的堆积,要做到整体大于组分之和,同时要研究高效优化的控制算法才能使系统具有实时处理能力。 3 信息融合问题 在仿生机器人的设计开发中,为实现对不同物体和未知环境的感知,都装备有一定量的传感器。多传感器的信息融合技术是实现其具有一定智能的关键。信息融合技术把分布在不同位置的多个同类或不同类的传感器所提供的局部环境的不完整信息加以综合,消除多传感器信息之间可能存在的冗余和矛盾,从而提高系统决策、规划、反应的快速性和正确性。 4 机构设计问题 合理的机构设计是仿生机器人实现的基础。生物的形态经过千百万年的进化,其结构特征极具合理性,而要用机械来完全仿制生物体几乎是不可能的,只有在充分研究生物肌体结构和运动特性的基础上提取其精髓进行简化,才能开发全方位关节机构和简单关节组成高灵活性的机器人机构。 5 微传感和微驱动问题 微型仿生机器人有些已不是传统常规机器人的按比例缩小,它的开发涉及到电磁、机械、热、光、化学、生物等多学科。对于微型仿生机器人的制造,需要解决一些工程上的问题,如动力源、驱动方式、传感集成控制以及同外界的通讯等。实现微传感和微驱动的一个关键技术是机电光一体结合的微加工技术。同时,在设计时必须考虑到尺寸效应、新材料、新、工艺等问题。
超小型仿生扑翼飞行器扑翼结构有限元分析
目录 摘要 (1) ABSTRACT (2) 0 引言 (4) 1 国内外仿生扑翼飞行器研究的发展综述 (6) 1.1 国外研究的现状 (6) 1.2 国内研究的现状 (10) 1.3 课题研究的主要内容 (11) 2 超小型仿生扑翼飞行器扑翼有限元模型的建立 (11) 2.1 有限元分析的概述 (11) 2.1.1 有限元分析的原理 (11) 2.1.2弹性力学基础 (14) 2.2 ANSYS软件的介绍 (21) 2.2.1 前处理模块PREP7 (22) 2.2.2 求解模块SOLUTION (23) 2.2.3 后处理模块POST1和POST26 (24) 2.3 扑翼有限元模型的建立 (24) 2.3.1 超小型仿生扑翼飞行器扑翼几何物理模型的建立 (25) 2.3.2 单元类型的选择 (28) 2.3.3 单元特性的定义 (30) 2.3.4 有限元网格划分 (31)
2.4 本章小结 (32) 3 超小型仿生扑翼飞行器扑翼的静态力学特性讨论 (33) 3.1 超小型仿生扑翼飞行器扑翼的结构线性静力学分析 (33) 3.2 超小型仿生扑翼飞行器扑翼的结构非线性静力学分析 (37) 3.3 初探材料特性对仿生扑翼刚度等性能的影响 (40) 3.4 本章小结 (45) 4 结论 (45) 参考文献 (47) 译文 (50) 原文说明 (60)
摘要 超小型仿生扑翼飞行器是一种模仿鸟类或昆虫飞行的新概念飞行器,在应用技术上超出了传统的飞机设计和气动力的研究范畴,同时开创了微机电系统技术(MEMS)在航空领域的应用。设计和制造具有良好动力学特性的高效仿生扑翼,是超小型仿生扑翼飞行器研究中的一个关键环节,同时也是目前非常富有挑战性的研究难题。 本文利用有限元的基础理论,对仿照蜻蜓翅翼,设计的仿生扑翼进行结构静力学等内容的分析,研究了超小型仿生扑翼飞行器扑翼的结构特性等。文中的建模、分析方法及所得结论,为超小型仿生扑翼飞行器扑翼的设计、制作和应用提供了一定的理论依据。 本文基于蜻蜓真实的翅翼样本,利用ANSYS10.0软件,分别建立了仿生扑翼1和仿生扑翼2的几何结构模型,并通过选择适当的单元类型及设定特性参数,完成三维仿生扑翼1和仿生扑翼2的有限元模型。在此基础上,对超小型仿生扑翼飞行器扑翼进行静态特性分析,分别对仿生扑翼1和仿生扑翼2进行线性和非线性力学分析,比较两种情况下结构的变形及应力等静态性能,并初步探讨了改变材料特性对仿生扑翼刚度变形的影响,总结出仿生扑翼的几何外形和结构布局以及材料都会对扑翼的刚性产生一定的影响。 关键词:超小型飞行器,仿生扑翼,有限元分析
六足机器人设计参考解析
摘要 六足机器人有强大的运动能力,采用类似生物的爬行机构进行运动,自动化程度高,可以提供给运动学、仿生学原理研究提供有力的工具。本设计中六足机器人系统基于仿生学原理,采用六足昆虫的机械结构,通过控制18个舵机,采用三角步态和定点转弯等步态,实现六足机器人的姿态控制。系统使用 RF24L01射频模块进行遥控。为提高响应速度和动作连贯性,六足机器人的驱动芯片采用ARM Cortex M4芯片,基于μC/OS-II操作系统,遥控器部分采用ARM9处理器S3C2440,基于Linux系统。通过建立六足机器人的运动模型,运用正运动学和逆运动学对机器人进行分析,验证机器人步态的可靠性。 关键字:六足机器人,Linux,ARM,NRF24L01,运动学 Abstract Bionic hexapod walking robot has a strong ability of movement, the use of similar creatures crawling mechanism movement, high degree of automation, can be provided to the kinematics, the principle of bionics research provides powerful tool. Six feet in the design of this robot system based on bionics principle, the mechanical structure of the six-legged insect, through 18 steering gear control, use the gait, such as triangle gait and turning point to control the position of six-legged robot. Remote control system use RF24L01 rf modules. In order to improve the response speed and motion consistency, six-legged robot driver chip USES the ARM architecture (M4 chip, based on mu C/OS - II operation system, remote control part adopts ARM9 processor S3C2440, based on Linux system. By establishing a six-legged robot motion model, using forward kinematics and inverse kinematics analysis of robot, verify the reliability of the robot gait. KEYWORD:Bionic hexapod walking robot;Linux,ARM,NRF24L01;Kinematics
微型仿生扑翼飞行器的尺度效应分析
第37卷第6期2005年12月 南 京 航 空 航 天 大 学 学 报Jou rnal of N an jing U n iversity of A eronau tics &A stronau tics V o l .37N o.6 D ec .2005微型仿生扑翼飞行器的尺度效应分析 王姝歆1,周建华2,颜景平2 (1.南京航空航天大学工程中心,南京,210016;2.东南大学机械系,南京,210096) 摘要:微型仿生扑翼飞行器是一种新概念的微型飞行器。但它不是对传统飞行器的简单几何缩小,当其特征尺度缩小到一定尺度时,系统内各种因素的相对影响将产生质的变化。针对微型仿生扑翼飞行器的机械扑翼系统,包括微驱动器、仿生翅、运动系统和动力源等,本文进行了尺度效应分析。分析结果表明,当尺寸减小时,仿生飞行更容易实现:通过共振能实现高频运动,微静电、电磁和压电驱动器都能满足扑翼系统功率需求。这为设计和研制微型仿生扑翼飞行器提供了理论依据。 关键词:微型仿生扑翼飞行器;尺度效应;扑翼系统;微型飞行器 中图分类号:T P 39119 文献标识码:A 文章编号:100522615(2005)0620807204 基金项目:211工程振兴行动计划(3008002102)资助项目;南京航空航天大学科研启动基金资助项目。 收稿日期:2004211229;修订日期:2005209212 作者简介:王姝歆,女,讲师,1969年4月生,E 2m ail :w sxch @sohu .com ;周建华,男,副教授,1963年生;颜景平,男,教授,博士生导师,1932年4月生。 Ana lysis of Sca l i ng Effect on B ion ic Fly i ng M icro -Robot W A N G S hu 2x in 1 ,ZH OU J ian 2hua 2 ,YA N J ing 2p ing 2 (1.Engineering Cen ter ,N an jing U n iversity of A eronau tics &A stronau tics ,N an jing ,210016,Ch ina ; 2.M echan ical D epartm en t ,Sou theast U n iversity ,N an jing ,210096,Ch ina ) Abstract :T he b i on ic flying m icro 2robo t is a com p licated in telligen t robo t ,i .e .and a m icro aerial veh icle .W hen the characteristic scale of the robo t is decreased to som e ex ten t ,the in teracti on s of facto rs in the system change in natu re .A i m ed at the m echn ical flapp ing w ing system of the b i on icflying m icro 2robo t including the m icro 2actuato rs ,the b i on ic w ing ,the locom o ti on system ,and the energy sou rce ,the scaling effect is analyzed .R esu lts show that the b i on ic flying can be m o re easily realized w hen the scaling sizes are decreased ,thu s m ak ing h igh flapp ing frequency m o ti on by the resonance ,and m eeting the pow er needs of the flapp ing w ing fo r the electro static ,the electrom agnetic and p iezoelectric actuato rs .It p rovids a theo ry foundati on to design and develop b i on ic flying m icro 2robo ts .Key words :b i on ic flying m icro 2robo t ;scaling effect ;flapp ing w ing ;m icro air veh icle 由于在微小尺度下,雷诺数降低导致传统固定翼和旋转翼飞行方式产生的升力效率明显降低[1],这促使人们不得不寻求更高效的飞行方式来设计微型飞行器。微型飞行器雷诺数大约在10~105之间[1],在此雷诺数范围内,自然界飞行物如昆虫和小鸟,没有一种是采用类似机械飞行的固定翼或旋翼驱动方式实现飞行,它们都是借助扑翼方式实现自主飞行,具有极高的机动灵活性,且消耗的能量也很少,如直升机悬停飞行时比功率约为70 W kg ,昆虫悬停飞行时的比功率是30W kg [2] 。因 此,模仿自然界中的昆虫和小鸟实现扑翼飞行已成为解决这一问题的可行选择。 微型仿生扑翼飞行器能够将举升、悬停和推进功能集于一个扑翼系统,涉及的微机械领域主要是扑翼系统,包括微驱动器、仿生翅、拍动机构和动力源等。当物体的尺寸改变时,与尺寸相关的各种物理量、机械量也发生相应的变化,从而产生尺度效应。例如,仿生翅结构和运动与尺寸有关,实现飞行
仿生机械蜘蛛设计与仿真
vvv学院毕业论文(设计)任务书 毕业论文(设计)题目 仿生机械蜘蛛设计与仿真 学生姓名 vvv 专业 机制 班级 0912 指导教师 vvv 一、毕业论文(设计)的主要内容及要求 设计一种步行仿生机械蜘蛛,要求: 1、绘制仿生机械蜘蛛零部件三维图型和装配图; 2、绘制仿生机械蜘蛛零部件工程图; 3、对仿生机械蜘蛛进行运动仿真; 4、设计仿生机械蜘蛛运动控制方案。 二、毕业论文(设计)应收集的资料及主要参考文献 [1]孙立宁,王鹏飞,黄博. 四足仿生机器人嵌入式多关节伺服控制器的研究[J]. 机 器人,2005,06:517-520. [2] 许宏岩 , 付宜利 , 王树国 , 刘建国 . 仿生机器人的研究 [J]. 机器 人,2004,03:283-288. [3]徐小云,颜国正,丁国清. 微型六足仿生机器人及其三角步态的研究[J]. 光学精 密工程,2002,04:392-396. [4]马光. 仿生机器人的研究进展[J]. 机器人,2001,05:463-466. [5]迟冬祥,颜国正. 仿生机器人的研究状况及其未来发展[J]. 机器 人,2001,05:476-480. [6]徐小云,颜国正,丁国清,刘华,付轩,吴岩. 六足移动式微型仿生机器人的研究[J]. 机器人,2002,05:427-431. [7]刘鹏,郑浩峻,关旭. 基于并联腿机构的四足仿生机器人开发[J]. 微计算机信 息,2007,No.19205:226-227+264. [8]漆向军,陈霖,刘明丹. 控制六足仿生机器人三角步态的研究[J]. 计算机仿
真,2007,04:158-161. [9]张争艳,刘彦飞,冯敏,杨艳芳. 基于虚拟样机技术的六足仿生机器人设计与仿 真[J]. 装备制造技术,2007,No.15410:35+43. [10]王丽慧,周华. 仿生机器人的研究现状及其发展方向[J]. 上海师范大学学报 (自然科学版),2007,06:58-62. [11]赵涓涓,李强,任美荣,郭晓东,李晓飞. 六足仿生机器人运动控制系统的设计[J]. 机电工程技术,2008,v.37?No.20112:44-45+76+106. [12]王鹏飞,黄博,孙立宁. 四足仿生机器人稳定性判定方法[J]. 哈尔滨工业大学 学报,2008,07:1063-1066. [13] 孙立宁 , 胡海燕 , 李满天 . 连续型机器人研究综述 [J]. 机器 人,2010,v.3205:688-694. [14]谭云福,党培. 一种四足仿生机器人步态协调控制的策略[J]. 微计算机信 息,2010,v.26?No.34132:152-154. [15]姜铭,李鹭扬. 混联仿生机器狗构型研究[J]. 机械工程学报,2012,v.4801:19-24. 三、毕业论文(设计)进度及要求 1、1~3周阅读资料、撰写开题报告; 2、4~10周完成毕业设计任务指定工作; 3、11~13周撰写毕业论文; 4、14周毕业答辩 5、要求每周至少向指导教师汇报一次工作进度。
机器人作业参考--扑翼飞行机器人设计与分析
机器人机构分析与综合——扑翼飞行机器人的设计与分析 姓名: 班级: 学号: 日期:
扑翼飞行机器人的设计与分析 摘要 仿生扑翼飞行机器人是一种具有新颖移动方式的、集多种前沿技术于一体的新概念仿生飞行器,目前己成为国际上的研究热点之一,无论在军事还是民用领域都有着广阔的应用前景。本文在总结了国内外最新研究成果基础上,围绕仿生扑翼飞行机理、仿生翼运动模型以及扑翼驱动系统展开了研究与探索。 首先介绍了仿生扑翼飞行的研究背景,分析了仿生扑翼飞行的特点及其可观的应用前景;阐述了仿生扑翼飞行机器人的研究现状,探讨了目前和将来研究中所遇到的一些关键技术。 基于空气动力学理论,对仿生扑翼飞行机器人的可行性进行了分析;探讨了动物飞行方式及其尺度律对仿生扑翼飞行机器人设计的启发,指出采用扑翼布局是解决在低雷诺数下飞行难点的一种可行方案;重点研究了动物扑翼飞行机理,为研制仿生扑翼飞行机器人设计提供了理论依据。 根据动物扑翼系统特点,探讨了仿生翼设计的一些重要因素;重点提出了扑式和洗式运动模型的概念,并分析比较了两者的特点,详细探讨了扑式运动模型的实现。 根据动物飞行尺度律,确定了样机设计参数;就基于连杆机构的扑翼驱动机构设计方案进行了分析比较,探讨了扑翼驱动机构的实现途径和方法,并针对基于四杆机构的扑翼驱动机构进行了优化设计;根据样机功率需求,选择了适合扑翼样机的动力装置、能源,设计了减速机构和控制系统。 对飞行方向控制、扑翼姿态以及柔性翅的模仿提出了自己独特新颖的观点,并把这些观点应用在扑翼式飞行机器人的设计之中。 根据设计参数建立三维模型,并对模型进行了运动仿真和受力分析,得到了较好的仿真和分析结果。 本文所有工作都取得了预期效果,相信随着研究工作的深入及相关技术的完善,仿生扑翼飞行机器人的研究必将取得突破性的进展。 关键词:仿生,扑翼飞行机器人,动物飞行机理,尺度律,扑翼驱动机构,优化设计,三维建模,运动仿真,应力分析
仿生蜘蛛机器人的设计与研究
毕业设计(论文)仿生蜘蛛机器人的设计与研究 姓名:寇艳虎 学号: 专业:机械工程与自动化 系别:机械与电气工程系 指导教师:孔繁征 2021年4月
摘要 本文总结了背景和目标,仿生蜘蛛机器人的简单介绍。通过研究机器人的六足仿生的运动,这种设计已确定脚结构,使用3自由度的分析实现向前运动,把运动的机器人。想象的组件和装配映射仿生蜘蛛机器人以与相关部件的检查,确保机械设计的可行性都包含在总设计。 关键词:仿生;机器人;机构
ABSTRACT The paper has summarized the background and the goal of its topic and has made the simple introduction of the bionic hexapod robot. Through the research of the motion of the six feet of the robot, This design has determined the foot structure,using the analysis of 3 degrees of freedom realizes the forward motion and turning motion of the robot . Picturing of the component and assembly mapping of the bionic hexapod robot as well as the inspection of related parts which ensures the feasibility of the machinery design are both included in the total design. KEYWORDS:bionics ;hexapod robot ;machinery
最新六足爬虫机器人
本文的设计为六足爬虫机器人,机器人以锂电池为动力源,单片机为控制元件,伺服电机为执行部件,机器人采用三足着地进行运动,通过单片机对伺服电机的控制,机器人能够实现前进、后退等运动方式,三足着地运动方式保证了机器人能够平稳运行。伺服电机具有力量大,扭矩大,体积小,重量轻等特点。单片机产生20ms 的PWM 波形,通过软件改写脉冲的占空比,从而达到改变伺服电机角度的目的。 1 机器人运动分析 1.1 六足爬虫式机器人运动方案比较 方案一:六足爬虫式机器人的每条腿都能单独完成抬腿、前进、后退运动。 此方案的特点: 每条腿都能自由活动,每条腿都能单独进行二自由度的运动。每条腿的灵活性好,更容易进行仿生运动,六足爬虫机器人可以完成除要求外的很多动作,运动的视觉效果更好。由于每条腿能单独完成二自由度的运动,所以每条腿上要安装两个舵机,舵机使用数量大,舵机的安装难度加大,机械结构部分的制作相对复杂,又由于每个舵机都要有单独的信号控制,电路控制部分变得复杂了,控制程序也相应的变得复杂。 方案二:六足爬虫式机器人采取三腿为一组的运动模式,且同一侧的前腿、后腿的前后转动由同一侧的中腿进行驱动。采用三腿为一组(一侧的前足、后足与另一侧的中足为一组)的运动方式,各条腿能够协调的进行运动,机器人的运动相对平稳。 此方案特点:相比上述方案,个腿能够协调运动,在满足运动要求的情况下,舵机使用数量少,节约成本。机器人运动平稳,控制、驱动部分都得到相应的简化,控制简单。选择此方案,机器人还可进行横向运动。 两方案相比,选择方案二更合适。 1.2 六足爬虫式机器人运动状态分析 1.2.1 机器人运动步态分析
六足步行机器人的毕业设计说明书
本科毕业设计(论文) 六足步行机器人设计与仿真 燕山大学 2012年6月
本科毕业设计(论文) 六足步行机器人设计与仿真 学院(系):里仁学院 专业:机械电子工程 学生姓名:牛智 学号: 0811******** 指导教师:田行斌 答辩日期: 20012.6.17
燕山大学毕业设计(论文)任务书
摘要 摘要 基于仿生学原理,在分析六足昆虫运动机理的基础上,采用了仿哺乳类的腿部结构,并针对这种腿部结构设计了六足的行走方式,通过对18个直流伺服电机的控制,采用三角步态,实现了六足机器人的直行功能。仿真证明,这种结构能较好地维持六足机器人自身的平衡,并且对今后更深入地研究六足机器人抬腿行走姿态及可行性,具有较高的参考价值。 针对仿生六足步行机器人关节较多,其步态轨迹规划和关节控制量计算都较为复杂的现状,采用Solidworks软件与UG软件相结合的方式对六足仿生步行机器人的样机模型进行了运动学仿真与分析。通过仿真,验证了所设计的三角步态的适用性。 关键词六足机器人;步行;三角步态;运动学仿真
燕山大学本科生毕业设计(论文) Abstract A bionic leg structure which is similar to the legs of mammals was used,and a hexapod walking mode was designed according to this structure.By controlling 18 step motors straight walking function of the hexapod robot has been implemented with tripod gait movement.Simulation and experiment show that this structure can keep the hexapod robot balance better,providing high reference value to research the advantage and feasibility of leg raising walking gesture. As there are many joints in the bionic hexapod walking robot and the calculation of its walking track and joints control unit are comparatively comp- licated,the kinematical simulation and analysis of the model of bionic hexapod walking robot have been done by using solidworks and UG.Through simulation,the applicability of designed tripod gait are validated. Keywords Hexapod robot;Walking;Tripod gait;Kinematics simulation
仿生机器人报告-仿生扑翼UUV
仿生扑翼UUV研究现状分析 摘要 本文对一种新型扑翼UUV的研究现状做了分析。首先简要介绍扑翼UUV的产生背景和应用前景,然后对扑翼UUV进行了流体动力学分析、推进性能分析并对基于CPG的扑翼UUV运动控制方法进行了分析。通过流体动力学分析得到了关于扑翼UUV攻角和翼型对推进性能的影响,推进性能分析则得到了扑动频率、拍动幅度和翻转幅度对推进性能的影响。基于CPG的运动控制方法将CPG引入到UUV 的控制中,简化了控制参数,可实现扑翼UUV的节律运动和转弯运动。 关键词:仿生扑翼UUV 流体动力学推进性能 CPG
1绪论 1.1仿生扑翼UUV产生背景 无人水下航行器(Unmanned Undersea Vehicle)的研究工作开始于20世纪中期,进入21世纪以来,由于人类对海洋资源开发、海洋环境研究的重视以及海洋在军事领域的重要作用,水下探测器的研究越来越受到重视。在过去的十年中,全世界大约有60个UUV研制计划,并建造了大约200个UUV(大部分为实验用),但是随着技术的成熟和近海工业发展的需要,商业用途的UUV也开始出现,并且在不断地发展和壮大。 然而,以往的UUV均是以传统的螺旋桨做为推进动力。在自然界中,有一类依靠扑翼游动的生物如海龟、企鹅等,他们的运动方式效率较高,而且机动灵活。仿生扑翼UUV是近几年提出的一种利用仿生扑翼作为推动力的新型UUV,正是以海龟等扑翼游动生物为仿生对象,依靠扑翼推进结构为其提供动力实现整个UUV 在水下的各种运动,包括上浮、下潜、转弯等,具有推进效率高、稳定性强、机动性及操纵性好等优点。 1.2仿生扑翼UUV的特点 仿生扑翼UUV的仿生对象是依靠扑翼进行运动的动物,他们具有爆发力强、机动性高、稳定性好等特点,对于游动和姿态的控制能力是目前任何水下设备无法模拟的。与传统的螺旋桨推进方式相比,水下扑翼UUV具有以下特点: ●良好的运动性能:仿生扑翼推进器可提高水下航行器的起动、加速和转向性 能,在低速条件下保持高机动性和稳定性。 ●流体性能更完善:海洋生物通过扑翼的划动产生推进力,具有更理想的流体 力学性能。 ●能源利用率高:仿生扑翼推进器可以大大节省能量,提高能源利用率,延长 航行器的水下作业时间。 ●噪声小:仿生扑翼推进器运行期间的噪音比螺旋桨运行期间的噪音要低得 多,不易被对方声纳发现或识别,有利于突防,具有重要的军事价值。 ●推进器和舵的统一:仿生扑翼推进器的应用将改变目前螺旋桨和舵机系统分 开,功能单一,结构庞大,机构复杂的情况,实现桨一舵功能的合二为一。 ●可采用多种驱动方式:仿生扑翼推进器可采用机械驱动,也可以采用液压驱 动和气压驱动,以及混合驱动方式;对于微小型水下运动装置,可采用形状记忆合金、人造合成肌肉以及压电陶瓷等多种驱动元件。 1.3仿生扑翼UUV的用途 由于仿生扑翼UUV较传统UUV的优势,其用途更加广泛。
六足仿生机器人
六足仿生机器人 人们对机器人的幻想与追求已有3000多年的历史,人类希望制造一种像人一样的机器,以便代替人们完成各种工作。1959年,第一台工业机器人在美国诞生,近几十年,各种用途的机器人相继问世,使人类的许多梦想变为现实。随着机器人工作环境和工作任务的复杂化,要求机器人具备有更高的运动灵活性和特殊位置环境的适应性,机器人简单的轮子和履带的移动机构已不能适应多变复杂的环境要求。在仿生技术、控制技术和制造技术不断发展的今天,各种各样的仿生机器人相继被研制出来,仿生机器人已经成为机器人家族重要的成员。 仿生爬行机器人是一种基于仿生学原理研制开发的新型足式机器人。与传统的轮式或者履带机器人相比,足式机器人自由度多,可变性大、结构发杂、控制繁琐,但其在运动特性方面具有独特的优点:首先是足式机器人具有较好的机动性,对不平地面的适应能力十分突出,由于其立足点是离散的,与地面的接触面积较小,因而可以在可能达到的地面上选择最优支撑点,从而能够相对容易的通过松软地面以及跨过比较大的障碍;其次是足式机器人的运动系统可以实现主动隔振,允许机身运动轨迹与足轨迹解耦。尽管地面高
低不平,机身的运动仍可达到相对平稳。 本课题主要研究的内容是一种六足仿生机器人的机械机构部分的设计和分析,围绕六足仿生机器人的前沿技术,主要仿生对象为蚂蚁,主要实现机器人前后左右移动,具有良好的仿生特性,研究具有抗冲击性以及地形适应能力的仿生机设计技术,六足仿生机器人系统模型;研究六足机器人适应不同地形环境的能力。研制系统设计与仿真等核心单元。研制高速、高负载力、对典型非结构化地形具有高适应能力的六足仿生机器人,并开展系统结构、地形适应能力以及对抗控制实验验证。本次设计的预期要达到的效果是可以实现灵活进退和转向,跨越障碍物,通过洼地和台阶并且保持平衡防止倾翻,能够实现实时避障,合理规划行走路线。 1、技术方案 一、机器人功能介绍: a)可实现前进后退转弯等基本动作,加装传感器后对小障碍物越过、大障碍物绕开,具有遥控模式,可通过无线装置无线控制。 b)机器人机械机构: 舵机在仿生机器人中的应用:舵机有体积紧凑,便于安装,输出力矩大,稳定性好等优点。一个放上机器人,机器人各个关节都有一定的自由度数,而每个舵机正是实现其中一个个关节在一个自由度上的运动。
扑翼飞行机器人的设计与分析方案
扑翼飞行机器人的设计与 分析方案 1 绪论 1.1 引言 目前国内外对飞行机器人的研究多集中于固定翼和旋翼类型,这两种类型的飞行机器人各有特长,但活动场所和工作环境等都受到一定的限制。随着军事、民用的发展和科学技术的进步,对于许多任务而言,固定翼和旋翼类型的机器人的飞行方式是不够的。因此,为了适应任务的复杂性和环境的多样性,对具有更好机动灵活性的飞行方式的研究是势在必行,即要在飞行方式上进行创新。与固定翼和旋翼类型的飞行机器人相比,扑翼飞行方式由于其具有更大的机动灵活性、更好的避障能力以及低廉的飞行费用,因而受到国内外众多研究者的广泛关注。许多国家都已在这方面进行了研究,如美国加州大学、日本东京大学等都已经在这个领域进行了深入的研究探索工作,国内的科学家们也开始了这方面的基础研究工作。 仿生扑翼飞行机器人目前还处在一个刚刚开始和兴起的阶段,虽然取得了一些阶段性研究成果,但距离实用阶段还有很远,仍有很多理论和实践工作需要进行深入研究。我国应利用这个有利时机,加大投入,争取在仿生扑翼飞行机器人研究的某些关键技术方面取得突破。 1.2 扑翼飞行特点及其应用前景 仿生扑翼飞行机器人或仿生扑翼飞行器,既属于飞行器范畴,又属于新概念的仿生飞行机器人研究范畴,是一种模仿鸟类和昆虫飞行,基于仿生学原理设计制造的新型飞行机器人:随着对动物飞行机理的认识和微电子机械技术(MEMS)、空气动力学和新型材料等的快速发展,仿生扑翼飞行机器人在目前己成为一个新的研究热点。 仿生扑翼飞行机器人若研制成功,它便有一些飞行机器人所不具有的优点:如原地或小场地垂直起飞,极好的飞行机动性和空中悬停性能以及飞行费用低廉,它将举升、悬停和推进功能集于一扑翼系统,可以用很小的能量进行长距离
仿生六足机器人研究报告学士学位论文
项目研究报告 ——小型仿生六足探测机器人 一、课题背景: 仿生运动模式的多足步行机器人具有优越的越障能力,它集仿生学原理、机构学理论、自动控制原理与技术、计算机软件开发技术、传感器检测技术和电机驱动技术于一体。 不论在何种地面上行走,仿生六足机器人的运动都具有灵活性与变化性,但其精确控制的难度很大,需要有良好的控制策略与精密的轨迹规划,这些都是很好的研究题材。 二、项目创新点: 作为简单的关节型伺服机构,仿生六足机器人能够实现实时避障,合理规划行走路线。 简单的关节型机器人伺服系统不仅具有可批量制造的条件,作为今后机器人群系统的基本组成,也可以作为探索复杂伺服机构的研究对象。 三、研究内容: 1.仿生学原理分析: 仿生式六足机器人,顾名思义,六足机器人在我们理想架构中,我们借鉴了自然界昆虫的运动原理。 足是昆虫的运动器官。昆虫有3对足,在前胸、中胸和后胸各有一对,我们相应地称为前足、中足和后足。每个足由基节、转节、腿节、胫节、跗节和前跗节几部分组成。基节是足最基部的一节,多粗短。转节常与腿节紧密相连而不活动。腿节是最长最粗的一节。第四节叫胫节,一般比较细长,长着成排的刺。第五节叫跗节,一般由2-5个亚节组成﹔为的是便于行走。在最末节的端部还长着两个又硬又尖的爪,可以用它们来抓住物体。 行走是以三条腿为一组进行的,即一侧的前、后足与另一侧的中足为一组。这样就形成了一个三角形支架结构,当这三条腿放在地面并向后蹬时,另外三条腿即抬起向前准备替换。 前足用爪固定物体后拉动虫体向前,中足用来支持并举起所属一侧的身体,后足则推动虫体前进,同时使虫体转向。 这种行走方式使昆虫可以随时随地停息下来,因为重心总是落在三角支架之内。并不是所有成虫都用六条腿来行走,有些昆虫由于前足发生了特化,有了其他功用或退化,行走就主要靠中、后足来完成了。 大家最为熟悉的要算螳螂了,我们常可看到螳螂一对钳子般的前足高举在胸前,而由后面四条足支撑地面行走。
基于Arduino的多功能六足仿生机器人
基于Arduino的多功能六足仿生机器人 如今这个时代人们对地球的探索进行的越来越深入,探索的区域越来越不适合人类工作,因此探索方式由传统的人工探测改为较为先进的机器人探测。然而传统的轮式机器人已不能满足人类的需求,严重的受于地形限制,尤其是工作环境不稳定的废墟、丛林、山洞等特殊场合。因此仿生学引起普遍重视,仿生学机器人被大量生产制作。 我们此次设计采用仿生学原理,制作了这个仿生学六足机器人。六足仿生机器人就可以很好地克服普通轮式机器人的缺点,可以很好地适应各种工作环境不稳定的废墟、丛林、山洞等,使得其工作区域增大。 该仿生机器人以arduino作为主控,用24路舵机控制板控制18路舵机以实现机器人的平稳运行,用PS2无线手柄控制机器人运动。有关机器人运动方式,采用传统的三角步态。三角步态(或交替三角步态),是β =1/2 时的波形步态,运动时六条腿成两组三角形交替支撑迈步前进。“六足纲”昆虫(蟑螂、蚂蚁等)步行时,一般不是六足同时直线前进,而是将三对足分成两组,以三角形支架结构交替前行。身体左侧的前、后足及右侧的中足为一组,右侧的前、后足和左侧的中足为另一组,分别组成两个三角形支架。当一组三角形支架中所有的足同时提起时,另一组三角形支架的三只足原地不动,支撑身体,并以其中足为支点,前足胫节的肌肉收缩,拉动身体向前,后足胫节的肌肉收缩,将虫体往前推,因此身体略作以中足为支点的转动,同时虫体的重心落在一另一组“三角形支架”的三足上,然后再重复
前一组的动作,相互轮换周而复始。这种行走方式使昆虫可以随时随地停息下来,因为重心总是落在三角支架之内。这就是典型的三角步态行走法,其行走轨迹并非是直线,而是呈“之”字形的曲线前进。 采用ADXL335模块进行运动姿态步伐的检测,判断其运动中躯干是否平稳。超声波红外模块结合以实现大角度区域内完美避障,有PS2无线手柄控制,采用将人工控制与自主控制相结合的方式,确保其运动的稳定性。机器人上还有GSM通信模块,可以将其搭载的数据采集系统的数据实时传输回PC端,并在PC端进行数据分析。 本次设计创新点在于它所带的无线充电模块,使它还可以作为小型机站,前期搭载小型无人机进行工作,当运动至陆地机器人无法通
仿生机器人
仿生制造技术之仿生机器人 1、仿生机器人产生的背景 早在地球上出现人类之前,各种生物已在大自然中生活了亿万年,在它们为生存而斗争的长期进化中,获得了与大自然相适应的能力。生物学的研究可以说明,生物在进化过程中形成的极其精确和完善的机制,使它们具备了适应内外环境变化的能力。生物界具有许多卓有成效的本领。如体内的生物合成、能量转换、信息的接受和传递、对外界的识别、导航、定向计算和综合等,显示出许多机器所不可比拟的优越之处。生物的小巧、灵敏、快速、高效、可靠和抗干扰性实在令人惊叹不已。仿生制造也正是结合生物的特性所进行制造和研究的一门科学。与此同时,随着机器人技术的发展,仿生机器人也由此应运而生。 2、仿生制造与仿生机器人的定义 仿生制造:模仿生物的组织结构和运行模式的制造系统与制造过程称为“仿生制造”。它通过模拟生物器官的自组织、自愈、自增长与自进化等功能,以迅速响应市场需求并保护自然环境。仿生制造是先进制造技术的一个分支 ,是传统制造技术与生命科学、信息科学、材料科学等领域结合 ,是采用生物形式实现制造或以制造生物活体为目标的一种制造方法[1]。其中仿生机械通过对生物机理、机构的研究 ,创造和完善制造工程科学的概念、原理和结构 ,从而为新产品的生产打下基础。 图1、三元交融模型[1]
图2、仿生制造的研究内容及方法[1] 仿生机器人:包括仿人的和仿生物的机器人两类。前者模仿人的肌体构造或器官功能,如仿人手、手臂、类人机器人等。后者模仿各种生物如蚂蚁、象鼻、螃蟹等的功能。医用微型机器人更需要仿生学的支持。机器人在人体腔内移动的机理,极可能来自某些生物运动如蜗牛爬行的启发;另外必须弄清与人体腔相关的软组织生物力学,如规律性舒张收缩等因素对微移动机器人的影响。其中仿生机器人研究的比较多的还是四足仿生机器人,获得的成果有提出了一种基于姿态传感器信息的平衡控制方法通过使用三轴加速度传感器的反馈控制来稳定行走[2];而仿人机器人技术的一大挑战是赋予智能体自主和自适应的能力,目前做的比较好的是将基于小脑的控制系统嵌入到能够处理动态外部和内部复杂性的仿人机器人中[3]。 2、仿生机器人工作过程 仿生机器人是仿生学与机器人领域应用需求的结合产物,其主要的工作原理就是利用仿生学中的知识,模仿生物的特性,从而在某些环境完成某些工作。从机器人的角度来看,仿生机器人则是机器人发展的高级阶段问。生物特性为机器人的设计提供了许多有益的参考,使得机器人可以从生物体上学习如自适应性、鲁棒性、运动多样性和灵活性等一系列良好的性能。仿生机器人按照其工作环境可分为陆面仿生机器人、空中仿生机器人、水下仿生机器人和水陆两栖仿生机器
【CN110027705A】一种方便转向的大型仿生扑翼机器人【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910300842.1 (22)申请日 2019.04.15 (71)申请人 东莞理工学院 地址 523808 广东省东莞市松山湖科技产 业园大学路1号 (72)发明人 孙振忠 汪超 邓君 邱广文 胡常华 郑漫 (51)Int.Cl. B64C 33/00(2006.01) B64C 33/02(2006.01) B64D 27/24(2006.01) (54)发明名称一种方便转向的大型仿生扑翼机器人(57)摘要本发明涉及一种方便转向的大型仿生扑翼机器人,包括本体,所述的本体内设置有电池机构,所述的本体通过扑翼驱动机构连接有扑翼,所述的本体的尾部设置尾翼机构,所述的尾翼机构包括与本体连接的尾翼安装块,所述的尾翼安装块上设置有上下摆动舵机,所述的上下摆动舵机连接有上下摆动臂,所述的上下摆动臂连接有上下摆动块,且上下摆动块铰接在尾翼安装块上设置的上料摆动中心套上,所述的上下摆动块上设置有横向摆动舵机,所述的横向摆动舵机连接有尾翼块,所述的尾翼块连接有用于安装布片的尾翼骨架杆,采用两个舵机配合尾翼,实现尾翼的上下摆动和横向摆动,如此实现升降和转向的操作,结构简单,不会过多的增加整体重量,同时 能够助力飞行。权利要求书2页 说明书5页 附图4页CN 110027705 A 2019.07.19 C N 110027705 A
权 利 要 求 书1/2页CN 110027705 A 1.一种方便转向的大型仿生扑翼机器人,包括本体(1),所述的本体(1)内设置有电池机构,所述的本体(1)通过扑翼驱动机构(3)连接有扑翼(3),其特征在于,所述的本体(1)的尾部设置尾翼机构(5),所述的尾翼机构(5)包括与本体(1)连接的尾翼安装块(51),所述的尾翼安装块(51)上设置有上下摆动舵机(52),所述的上下摆动舵机(52)连接有上下摆动臂(53),所述的上下摆动臂(53)连接有上下摆动块(55),且上下摆动块(55)铰接在尾翼安装块(51)上设置的上料摆动中心套(54)上,所述的上下摆动块(55)上设置有横向摆动舵机(56),所述的横向摆动舵机(56)连接有尾翼块(57),所述的尾翼块(57)连接有用于安装布片(23)的尾翼骨架杆(58)。 2.根据权利要求1所述的一种方便转向的大型仿生扑翼机器人,其特征在于,所述的扑翼(3)包括第一翼骨架杆(21),所述的第一翼骨架杆(21)铰接有连动转块(25),所述的连动转块(25)连接有主动杆(26)和连动杆(27),所述的连动杆(27)连接有第二翼骨架杆(28),所述的第一翼骨架杆(21)和第二翼骨架杆(28)上套接有骨架板(22),相邻的骨架板(22)之间设置有布片(23),所述的扑翼驱动机构(3)包括由驱动安装块(7)和驱动安装杆(8)组成的驱动架,所述的驱动架前端安装有摄像机安装块(4),所述的第一骨架杆(21)的端部铰接在驱动安装杆(8)上,所述的主动杆(26)与驱动转臂(15)铰接配合,所述的驱动转臂(15)连接有驱动装置。 3.根据权利要求2所述的一种方便转向的大型仿生扑翼机器人,其特征在于,所述的驱动装置包括设置在驱动安装块(7)上的两根驱动转轴(12),两根驱动转轴(12)上设置有相互啮合的同步啮合齿轮(14),且每根驱动转轴(12)上均套接有驱动转臂(15),其中一根驱动转轴(12)上套接有第二减速大齿轮(13),所述的第二减速大齿轮(13)与减速转轴上套接的第二减速小齿轮(11)啮合,所述的减速转轴设在驱动安装块(7)上,所且减速转轴上还套接有第一减速大齿轮(10),所述的第一减速大齿轮(10)啮合配合有第一减速小齿轮,所述的第一减速小齿轮与驱动安装块(7)上安装的驱动电机(9)配合。 4.根据权利要求2所述的一种方便转向的大型仿生扑翼机器人,其特征在于,所述的本体(1)上还设置有MPU6050姿态传感器,所述的连动杆(27)与第二翼骨架杆(28)配合的一端端部设置有平衡舵机(20),所述的平衡舵机(20)与第二翼骨架杆(28)配合并能使第二翼骨架杆(28)转动,所述的平衡舵机(20)由MPU6050姿态传感器的感应信号控制。 5.根据权利要求2所述的一种方便转向的大型仿生扑翼机器人,其特征在于,所述的布片(23)上设置有安装在第一翼骨架杆(21)或第二翼骨架杆(28)或尾翼骨架杆(58)上且能够拆卸的太阳能板(24),所述的太阳能板(24)通过导线与本体(1)的电池机构电性连通。 6.根据权利要求4所述的一种方便转向的大型仿生扑翼机器人,其特征在于,所述的第一翼骨架杆(21)和第二翼骨架杆(28)开设有接线插口(31),所述的接线插口(31)内设置有接线装置(29),所述的太阳能板(24)设置有能够插入到接线插口(31)并与接线装置(29)电性连接的接线插柱(30),所述的第一翼骨架杆(21)和第二翼骨架杆(28)内设置有与接线装置(29)电性连通的导线。 7.根据权利要求6所述的一种方便转向的大型仿生扑翼机器人,其特征在于,所述的接线装置(29)包括设置在第一翼骨架杆(21)或第二翼骨架杆(28)或尾翼骨架杆(58)内且与接线插柱(30)电性连接的接线套(40),所述的接线套(40)内设置有下部穿出第一翼骨架杆(21)或第二翼骨架杆(28)或尾翼骨架杆(58)的封堵块(32),所述的封堵块(32)穿出的部分 2