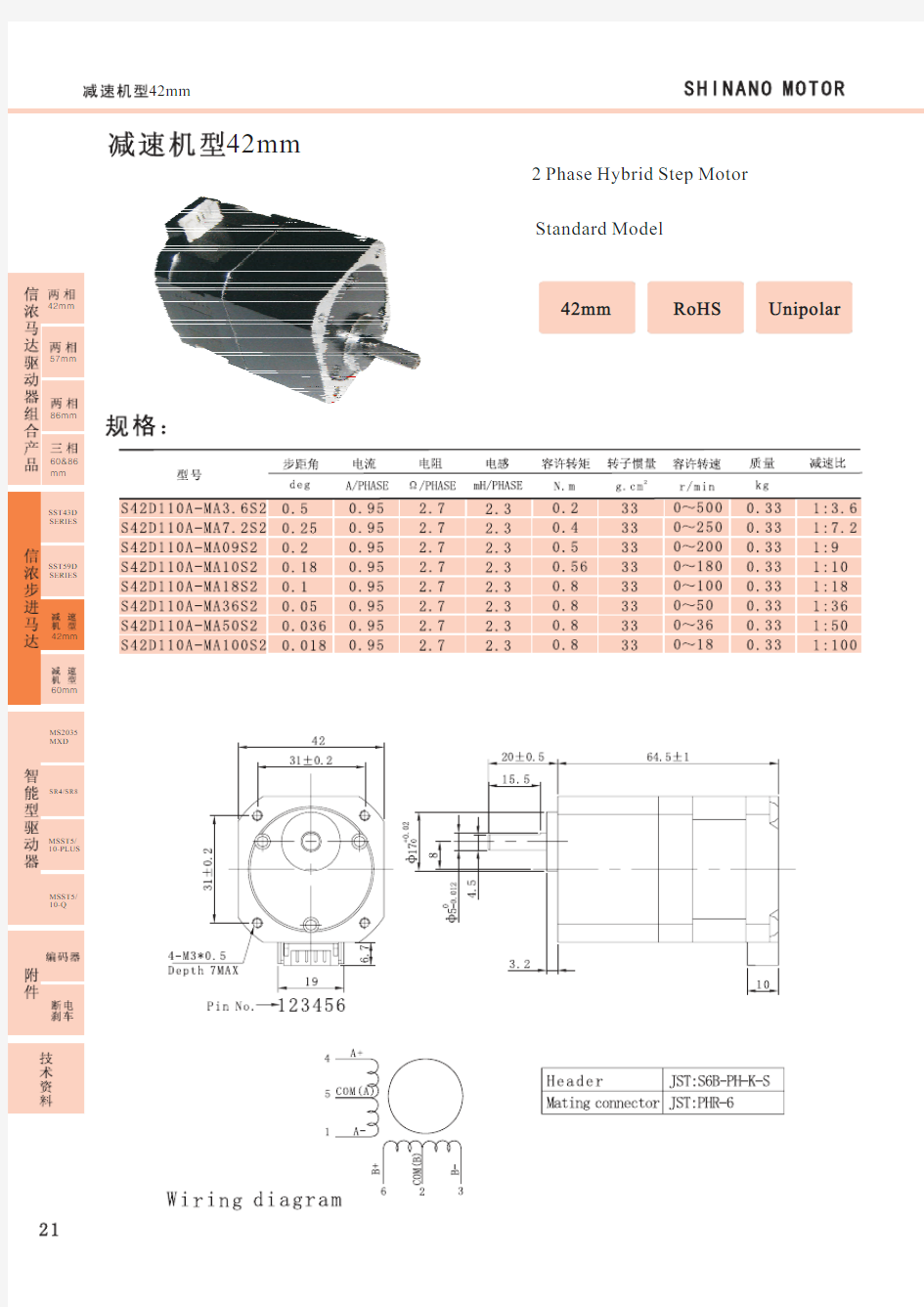
日本信浓42系列减速步进电机
Phase Hybrid 2Step Motor Standard
Model
60&86mm
42mm
57mm
86mm
60mm
42mm
SST43D SERIES
SST59D SERIES
SR4/SR8
MS2035MXD
MSST5/10-PLUS
MSST5/10-Q
信浓标准步进电机型号及选型建议
信浓步进电机的主要生产基地在东莞信浓马达有限公司,信浓日本工厂生产占比不到10%,信浓日本工厂生产的步进电机是为对应日本市场那些订单批量小、交货期要求急、可以接受比较高的单价的客户需求,其他情况都是在东莞信浓工厂生产,当然步进电机以外的产品还有其他工厂生产。信浓的产品彩页里一般只有标准步进电机型号,但标准步进电机并不是信浓的主力产品,绝大多数是定制产品,很多标准步进电机型号是没有生产过的,信浓的产品彩页上只有标准电机型号,是因为定制型号不方便公开产品信息,但标准型号可以告诉客户信浓可以生产什么尺寸、什么特性的产品。具体信浓的标准步进电机的型号哪些是比较通用的?不太通用的标准步进电机型号应该怎么样替代到定制型号呢?维科特机 电根据长期代理销售信浓步进电机的经验,给您整理了以下信浓步进电机选型建议,希望对于您的步进电机选型有帮助。 信浓28步进电机 信浓28步进电机标准型号有STP-28D100X,STP-28D200X,STP-28D300X,型号其中的字母X是需要进一步明确下来是1、2还是3、4,也就是说如果选定了型号,不应该带“X”,而是下面的标准步进电机型号之一: STP-28D1001,STP-28D1002,STP-28D1003,STP-28D1004,STP-28D2001,STP-28D2002,STP-28D2003,STP-28D2004,STP-28D3001,STP-28D3002, STP-28D3003,STP-28D3004。信浓标准28步进电机没有SST起头的型号,这些 标准电机在日本设计,一般是外销型号,建议选在东莞信浓设计生产的型号来替代:STP-28D1012,STP-28D1012-01,STP-28D2006,STP-28D2006-01,STP-28D3006,STP-28D3006-01,STP-28D3006-03。 信浓35步进电机 信浓35步进电机有2套模具,其中1套安装孔间距是26mm,轴径3mm, 这个系列扭矩小,电机轴承小,带负载能力差,基本上是外销型号,不推荐选用,选了一般也没有货,具体型号有: SST35D1045,SST35D1065,SST35D1085,SST35D1105,SST35D1125。 另外一套模具没有SST起头的标准型号,只有STH-35D起头的定制型号,机身长27.5mm,轴径5mm,安装法兰孔间距29mm,和国内常用的26mm不一样。
步进电机选型号
高速粘片机晶工作台的电机选型计算与运动控制 徐品烈 (中国电子科技集团第四十五研究所,北京东燕郊101601) 1 引言 目前,国内半导体生产线上的粘片机多使用从美国,德国,日本进口的设备。为降低成本,加快国内半导体设备的发展,提高生产效率,我所开发研制的高速粘片机,其粘片速度达到5只/s,UPH可达18 000片/h,它的关键指标和性能已达到国际先进水平。 高速粘片机主要用于LED芯片的粘接,能满足国内大多数LED生产线的需求,适用范围广,通用性强,除适合各种高品质、高亮度LED(红色、绿色、黄色、蓝色、白色等)生产外,还可用于部分半导体分离器件、二极管、三极管、PCB及小型DIP、SOP等产品的生产。 2 晶片工作台机构 高速粘片机主要工作过程包括:由上料机构将PCB框架放置于传输轨道中,由传输机构将PCB框架传输到点胶工位,点胶机构在所有PCB的焊盘上点胶后,由传输机构把PCB框架传输到粘片工位;晶片粘接在蓝膜上,而粘接晶片的蓝膜由绷环固定在晶片工作台上,CCD检测出芯片位置,通过晶片工作台的移动,使芯片自动对准于拾取位置,再由芯片拾取机构将芯片拾取后放置于点胶后的PCB焊盘上进行粘接。晶片工作台再根据CCD检测出的数据,使下一个相邻的芯片自动对准于拾取位置,等待拾取机构的拾取;重复这个过程,直到PCB 框架的所有焊盘上都粘有芯片后,由传输机构把PCB框架传输到收料工位,由收料机构将粘接完成的产品传送出去。 在高速粘片机中,晶片工作台机构根据CCD相机测量的数据,完成自动对准功能,要求在对准的过程中,实现精确的定位和快速的运动。晶片台由x、y工作台及晶圆承载台组成,采用双层直线导轨工作台和滚珠丝杠副,其主要技术参数: x向总行程:220 mm y向总行程:220 mm x向单步行程:10 mm y向单步行程:10 mm x、y向定位精度:±5 μm x、y向单步运行时间:50 ms 根据功能和技术参数,我们采用了双层直线导轨工作台和滚珠丝杠副,如图1。
步进电动机加减速曲线控制
步进电动机加减速曲线控制 步进电机因其无需反馈就能对位置和速度进行控制而在工业自动化设备中的应用极为广泛,对于速度变化较大的,尤其是加减速频繁的设备,常常发生力矩不足或者失步的现象,而实际上许多案例中步进电机的选型并没有问题,其问题在于负载位置对控制电路没有反馈,步进电机就必须正确响应每次励磁变化,如果励磁频率选择不当,电机不能够移到新的位置,那么实际的负载位置相对控制器所期待的位置出现永久误差,即发生失步现象或过冲现象。因此在速度变化较大的步进电机控制系统中,防止失步和过冲是开环控制系统能否正常运行的关键。 失步和过冲现象分别出现在步进电机启动和停止的时候。一般情况下,系统的极限启动频率比较低,而要求的运行速度往往比较高。如果系统以要求的运行速度直接启动,因为该速度已超过极限启动频率而不能正常启动,轻则可能发生丢步,重则根本不能启动,产生堵转。系统运行起来以后,如果达到终点时立即停止发送脉冲串,令其立即停止,则由于系统惯性作用,电机转子会转过平衡位置,如果负载的惯性很大,会使步进电机转子转到接近终点平衡位置的下一个平衡位置,并在该位置停下。 为了克服失步和过冲现象,应在步进电机启停时进行如图1所示的加减速控制。 从上图可以看出,L2段为恒速运行,L1 段为升频,L3段为降频,按照“失步”的定义,如果在 L1 及 L3 段上升及下降的控制频率变化大于步进电机的响应频率变化,步进电机就会失步,失步会导致步进电机停转,经常会影响系统的正常工作,因此,在步进电机变速运行中,必须进行正确的加减速控制。 以下按不同的控制单元,介绍几种常用的步进电机加减速控制方法。 1、运动控制卡作上位控制单元——以MPC01系列运动卡为例 MPC01系列运动控制卡可以作为PC机运动控制系统的核心控制单元。卡上的专用运动控制芯片可自动进行升降速计算。其运动控制函数库中也有专门进行梯形升降速运动参数设置的函数——set_profile(int ch, double ls, double hs, double accel)。其参数定义如下: ch: 设定的轴号。
基于Proteus的步进电机加减速控制辅助设计方法
表4钎杆改进前后的数据对比 总结点数总单元数 最大应力值(MPa )最小应力值(MPa )最大位移值(mm ) 原始模型3346105225027.150.112986改进模型 3654 10940 549 5.910.096754 4.3其他改进方面 除有限元分析的机械性能有改善之外,改进后的模型在轻量化、经济性上也有些许进步。 原始模型耗费材料的体积为(1.0644054×107)mm 3 ,质量为76.5kg ,改进后耗费材料体积为(1.0066225×107)mm 3 ,质量为72.757kg ,分别减 少5.43%和4.89%,此外,由于去除了上缸套、中缸套、下缸套,减少了合金钢原材料的使用并降低了加工成本,而增加体积较多的上缸体 所使用材料是经济性较好的球墨铸铁,可见,在制造成本上改进后的模型也取得了较好的效果。 5结论 在各项技术指标和基本工作原理不变的前提下,对液压破 碎锤零部件进行改进设计,并利用Pro/E 软件建立其机械本体和控制元件的三维模型,利用ANSYS 软件对液压破碎锤主要易损部件—冲击活塞、钎杆进行应力分析。通过对YC70液压破碎锤的建模和分析,改进后的模型在机械性能、经济性、轻量化等方面都取得了满意的结果,达到了改进的目的。 参考文献 [1]王雪,龚进,邹湘伏.液压冲击器的研究状况和发展趋势[J ].凿岩机械 气动工具,2006(3):19-23. [2]许同乐,夏明堂.液压破碎锤的发展与研究状况[J ].机械工程师,2005 (6):20-21.[3]范思源.液压破碎锤计算机仿真与实验研究[D ]:[硕士学位论文].上海:上海交通大学,2008. [4]杨国平.全液压独立无级调频调能液压冲击器的研究[D ]:[博士学位 论文].长沙:中南大学,2001. [5]谢良喜,陶平.液压破碎锤工作状态下活塞的力学模型与应力分析[J ].工程机械,2007(38):44-46. [6]博弈工作室.ANSYS9.0经典产品基础教程与实例详解[M ].北京:中国 水利水电出版社,2006.基于Proteus 的步进电机加减速控制辅助设计方法* 张利君张吉堂 (中北大学机械工程与自动化学院,太原030051 )Aided design methods for accelerating and decelerating control of step motor based on proteus ZHANG Li-jun ,ZHANG Ji-tang (School of Mechanical Engineering &Automatization ,North University of China ,Taiyuan 030051,China ) 文章编号:1001-3997(2011)05-0043-03 【摘要】研究利用Proteus 中的各种微控制器仿真模块实现步进电机加减速控制算法仿真,并且可以 在Proteus 中完成步进电机控制系统的硬件电路设计, 同时再结合软件程序设计进行仿真,最后通过Proteus 中的虚拟仪器记录分析仿真数据,从而实现了为设计步进电机加减速控制系统提供了一条快速、高效且低成本的设计途径。举例采用单片机AT89C52作为微控制器,通过高级仿真图表导出仿真数据,并利用Matlab 处理这些数据得到了预想的加减速曲线,证明方法在步进电机的加减速控制系统设计中可行性。 关键词:Proteus ;步进电机;加减速;仿真 【Abstract 】It studies the algorithm simulation for stepper motor accelerating and decelerating control by applying various micro-controller simulation module in Proteus software.It could complete the hardware cir -cuit design for control system of the step motor ,and simulate the design program with the software in Proteus . Thus ,the simulation data is recorded and analyzed through virtual instruments in Proteus so as to Provide a fast ,efficient and low-cost design approach for stepper motor accelerating and decelerating control system.For example ,it takes the single-chip computer AT89C52as the micro-controller which shall induct the simulation data through the advanced simulation chart , then the acceleration and deceleration curves expected shall be obtained after processing these data through the Matlab ,which shows us it is feasible to design the control system of the step motor in this method. Key words :Proteus ;Stepper motor ;Acceleration and deceleration ;Simulation 中图分类号:TH16 文献标识码:A *来稿日期:2010-07-04*基金项目:山西省科技攻关项目(20100321056-02) 1引言 步进电机是一种将电脉冲转换为机械角位移的机电执行元件,它的角位移量和输入脉冲的个数严格成正比,在时间上与输 入脉冲同步,非常适合于开环控制系统中,而且价格低廉,因此在工程中得到了广泛的应用。但不同的工程应用场合,其控制要求不同,需要的控制硬件和控制软件也不同,怎样快速地设计出符 ********************************************* Machinery Design &Manufacture 机械设计与制造 第5期 2011年5月 43
步进电机参数及含义
步进电机参数及含义 1、步进角: 当步进驱动器接收到一个脉冲信号,它所驱动步进电机按设定的方向转动的一个固定角度。 2、保持转矩(HOLDING TORQUE): 保持转矩(HOLDING TORQUE)是指步进电机通电但没有转动时,定子锁住转子的力矩。它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。 3、DETENT TORQUE: DETENT TORQUE是指步进电机没有通电的情况下,定子锁住转子的力矩。DETENT TORQUE在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。 4、精度: 一般步进电机的精度为步进角的3-5%,且不累积。 5、空载启动频率: 步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。 6、四相混合式步进电机与驱动器的串联接法和并联接: 四相混合式步进电机一般由两相驱动器来驱动,因此,连接时可以采用串联接法或并联接法将四相电机接成两相使用。串联接法一般在电机转速较的场合使用,此时需要的驱动器输出电流为电机相电流的0.7倍,因而电机发热小;并联接法一般在电机转速较高的场合使用(又称高速接法),所需要的驱动器输出电流为电机相电流的1.4倍,因而电机发热较大。 7、纹波电压: 纹波电压一般是指直流电源输出端含有交流电压是多少V,属称纹波电压或纹波系数。 8、如何确定步进电机驱动器的直流供电电源: A.电压的确定 混合式步进电机驱动器的供电电源电压一般是一个较宽的范围(比如IM483的供电电压为12~48VDC),电源电压通常根据电机的工作转速和响应要求来选择。如果电机工作转速较高或响应要求较快,那么电压取值也高,但注意电源电压的纹波不能超过驱动器的最大输入电压,否则可能损坏驱动器。 B.电流的确定 供电电源电流一般根据驱动器的输出相电流I来确定。如果采用线性电源,电源电流一般可取I的1.1~1.3倍;如果采用开关电源,电源电流一般可取I的1.5~2.0倍。
51单片机控制步进电机的转动,加减速,停止,反转
#include
unsigned char i; int j; while(1) { for(j=0;j<12;j++) //12个周期转一圈 { for (i=0; i<8; i++) //一个周期转30度 { if(flag==1) P2 = FFW[i]; //取数据 else P2 = FFZ[i]; delay(t); //t调节转速 } } } } void int0(void) interrupt 0 { EX0=0; delay(10); if(inc==0) { num++; P0=led7code[num%10]; if(num%10!=0&&flag){zhzhd=0;fazhd=1;} else if (num%10==0){zhzhd=0;fazhd=0;} else {zhzhd=1;fazhd=0;} switch(num%10) { case 0:t=0x00;break; case 1:t=0x12;break; case 2:t=0x11;break; case 3:t=0x10;break; case 4:t=0x09;break; case 5:t=0x08;break; case 6:t=0x07;break; case 7:t=0x06;break; case 8:t=0x05;break; case 9:t=0x04;break;
信浓步进电机型号大全
型号步进马达驱动器组合 Y07-28D1-5008 Y07-35D1-4001 Y07-43D1-1065 Y07-43D1-4271 Y07-43D1-5281 Y07-43D1-5040 Y07-43D1-5060 Y07-59D1-1300 Y07-59D1-2011 Y07-59D1-3260 Y07-59D1-3074 Y07-59D1-17151 Y07-59D1-17155 Y09-59D3-5001 Y09-59D3-7430 Y09-59D3-7536 Y09-59D3-7655 Y09-59D3-7230 Y09-59D3-7360 Y09-59D3-8536 Y09-59D3-7430-C Y07-43D1-4275 Y07-43D4-5045 Y07-42D1-2120 Y07-43D1-2026 Y07-43D4-5070 Y07-43D4-5050 Y07-59D1-3075 Y07-58D1-17151 Y07-58D1-17152 Y07-59D1-17156 Y07-59D1-17150 Y07-59D1-17157 Y07-59D1-3012 Y07-59D1-3044 Y07-59D1-3046 Y07-59D1-3039 Y07-59D1-2072 Y11-43D2-0040 Y11-43D2-0041 Y2SSR2 Y2SSR4 Y2SSR4-S1 Y2SSR4-S2 Y2SSR8 Y2SSR8-S1 Y2SSR8-S2 Y3SSR8 SR2 SR4 SR4-S1 SR4-S2 SR8 SR8-S1 SR8-S2 3SR8 SRAC8 Y2SSRAC8 MS2035MXD Y2S1560-S Y2S3060-S Y2S3060-M Y2S3060-N Y2S3060-O Y2S3060-0 Y2S4080-P 型号减速机步进马达 S42D110A-MACR6S2 S42D110A-MAGR2S2 S42D110A-MA09S2 S42D110A-MAA0S2 S42D110A-MAA8S2 S42D110A-MAC6S2 S42D110A-MAE0S2 S42D110A-MAA00S2 S60D120A-MACR6S2 S60D120A-MAGR2S2 S60D120A-MA09S2 S60D120A-MAA0S2 S60D120A-MAA8S2 S60D120A-MAC6S2 S60D120A-MAE0S2 S60D120A-MAA00S S90D130A-MACR6S2 S90D130A-MAGR2S2 S90D130A-MA09S2 S90D130A-MAA0S2 S90D130A-MAA8S2 S90D130A-MAC6S2 Y09-59D3-7430+KFPL80-5K Y09-59D3-7430+KFPL80-15K 型号刹车型步进马达 Y07-43D1-4275M Y07-58D1-4008 Y09-59D3-7538 型号步进智能驱动器 MSST5-Q-AN MSST5-Q-AE MSST5-Q-RN MSST5-Q-RE MSST10-Q-AN MSST10-Q-AE MSST10-Q-RN MSST10-Q-RE MSST5-PLUS MSST10-PLUS MSST5-S MSST10-S MS3ST10 Y2SST5-S Y2SST10-S Y2SST5-S-24V Y2SST10-S-24V MSST5-C-CN MSST10-C-CN MSST10-C-CE MSST5-C-CE 型号STM集成式步进马达 STM17R STM17R-1D STM17R-1E STM17R-2 STM17R-2D STM17R-2E STM17R-3 STM17R-3D STM17R-3E STM23R-2 STM23R-2D STM23R-2E STM23R-3 STM23R-3D STM23R-3E STM17S-1AN STM17S-1RN STM17S-1AE STM17S-1RE STM17S-2AN STM17S-2RN STM17S-2AE STM17S-2RE STM17S-3AN STM17S-3RN STM17S-3AE STM17S-3RE STM17Q-1AN STM17Q-1RN STM17Q-1AE STM17Q-1RE STM17Q-2AN STM17Q-2RN STM17Q-2AE STM17Q-2RE STM17Q-3AN STM17Q-3RN STM17Q-3AE STM17Q-3RE STM17C-1CN STM17C-1CE STM17C-2CN STM17C-2CE STM17C-3CN STM17C-3CE STM23S-2AN STM23S-2RN STM23S-2AE STM23S-2RE STM23S-3AN
步进电机加速 减速方法
不需要专门的延迟。但是软件中应该做到使速度是连续的渐变,而不是突变。 类似物理里面我们分析的“上抛物体”的运动一样:先按匀减速运动,速度减到零后就变成反方向的匀加速运动了。 不要有从某个速度“突变”为静止,或由静止“突变”为某个速度的操作。这种“突变”自然会产生冲击振动。 至于这个“匀加速度”、“匀减速度”的加速度大小,则可以根据步进电机的性能和负载的惯性大小来确定。 通常,步进电机都会给出一个“最大力矩”的参数。根据这个最大力矩,和负载的惯性(包括步进电机的转子和传动机构的惯性在内)大小,可以计算出加速度不应该超过多少。实际设计时,还应该比最大允许值再留出相当的余地。 当然,我上面说的“速度”、“加速度”都是一个连续的理论值,实际的步进电机是一步一步离散的操作的,和理论规律总会有差别。但是只要这种“量化误差”不超过一定限度,就可以有满意的效果了。 最理想的是,这个误差的累计值不超过0.5步。也就是说,假如按照上述“匀加速”、“匀减速”的理论计算,在时刻t的时候应该走到x步(有小数)的位置,而真实的执行效果是:走到的位置总是等于x的四舍五入取整的值。这是最理想的。 如果算法设计不好,这个累积误差可能会大些。但最坏的情况下,这个误差的累计值不要超过半个相位周期。例如,您的脉冲分配如果是“四相八拍制”,那么,累积误差就必须小于4步。 超出的话,就会发生步进电机的“失步”。 上面说的道理,对于采用不采用“细分”,道理是一样的。只是采用细分后的每一个“步”(“细步”)比原来小了,容易做到比较均匀。 例如上面说的“四相八拍制累积误差就必须小于4步”,如果采用了“16细分”,那么只要小于64“细步”就可以,显然软件里处理起来更容易一些。 但是,只要软件考虑设计仔细一些,不采用细分也是可以做到的。 【看了“广州一丁”兄的回答后,再补充说明一点】 上面“广州一丁”兄说的“减速时间长点,加速时间同时也长点”,就相当于我这里说的“匀加速运动”和“匀减速运动”段中,加速度的绝对值再小一些。 原则上说,这个加速度的绝对值,只要不超过上面说的根据电机性能和负载惯性算出来的允许值就可以。当然,更小一点冲击更小。 我只是担心,您是否没有按“匀加速”、“匀减速”设计,而是直接由静止突变为某个速度,或由某个速度突变为静止。如果是那样,问题就比较大了。 一般来说,一个方向的运动,应该分为至少两个阶段,或者还需要三个阶段。开始是由静止开始的匀加速度段,后段是匀减速段(直到速度减为零)。如此,中间的速度最高。假如最高的速度超出了电机或者我们的设备允许的值,那么还应该限制。于是,中间又多出一个段:匀速段。这就成了三个段。 这种控制原理上应该是清楚的。但是实现时的算法,则根据需求不同,有可能需要特别安排。
信浓步进电机STP-59D3039选型及使用说明
STP-59D3039最初是我公司要求信浓工厂为点胶机设备行业定制的一款步进电机,十几年前的时候信浓产品彩页上主要还是6线单极驱动步进电机,所以这款电机就是按照6线标准型号SST59D3300参数定制的,主要变更之处是将电机轴径增大到8mm来提高强度,轴长加长到26mm并轴铣扁以方便安装同步轮。在点胶机行业获得广泛应用,虽然后期大部分厂家换成另外4线双极驱动的步进电机STP-59D3074-04等型号,但目前有些厂家还是在继续选用这款步进电机。 STP-59D3039的主要电气特性参数如下: STP-59D3039主要外形尺寸: STP-59D3039接线图和引线尺寸:
单极驱动的时候按照上图接线,双极驱动的时候,半绕接线可以不接A-B-,接A,Acom和B,Bcom,串联接线的时候不接Acom,Bcom,接AA-和BB-。 但现在很少用户会选用STP-59D3039本来设计目的的单极驱动方式,绝大多数用双极驱动,STP-59D3039用于点胶机的话,通常适合用半绕组接线,这样额定电流还是3A,但总有一半的绕组是浪费的,不如换成STP-59D3039并联特性参数的的STP-59D3074-04,同样电流情况下扭矩和STP-59D3039的一样,但发热量只有STP-59D3039的一半,所以STP-59D3074-04在发热量和STP-59D3039一样的情况下,可以将电流增大到4.2A来获得更大的力矩,而STP-59D3039在4.2A电流下长时间工作可能因过热烧掉了。但如果有负载在低于300rpm转速下工作,可以用STP-59D3039串联接线,额度电流变成2.1A,这时候电机距频图可以参考SST59D3155。综上所述,如果不是用串联接线用于低速运行场合,我们不太推荐选用STP-59D3039。 STP-59D3039单极驱动下的距频图和半绕接线可以参考SST59D3300距频图,串联接线参考SST59D3155距频图。X轴是驱动器不细分情况下的脉冲频率值,这个脉冲频率*0.3=转速,rpm。
步进电机加减速程序
步进电机加减速程序 2009-7-24 14:52 提问者:568826036|浏览次数:1251次 要求C语言写的程序 2009-7-29 14:43 最佳答案 main.c文件内容: #include"stm32f10x_lib.h" #include"main.h" TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; GPIO_InitTypeDef GPIO_InitStructure; ErrorStatus HSEStartUpStatus; TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; int pulse; int StepCount; int pulse1; int pulse2; int t1; int t2; int r1; int r2; void RCC_Configuration(void); void NVIC_Configuration(void); void GPIO_Configuration(void); void TIM2_Configuration(void); void f(int Vt,int a,int d,int S); #define VECT_TAB_RAM int main(void) { #ifdef DEBUG debug();/*[初始化外围设备指针]*/ #endif RCC_Configuration(); //初始化时钟与复位 NVIC_Configuration();//初始化中断嵌套 TIM2_Configuration();//初始化定时器 GPIO_Configuration(); GPIO_WriteBit(GPIOD, GPIO_Pin_7, (BitAction)(0));
雷赛步进电机选型参考
步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。 * 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍 (0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变 精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。 两相步进电机命名规则 <> 上例表示机座号为57mm,两相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。 三相步进电机命名规则 <> 上例表示机座号为57mm,三相混合式,步距角为1.8度,扭矩0.9Nm,设计序号01,单边出轴的电机。
一文看懂步进电机型号定义及选择
一文看懂步进电机型号定义及选择 步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。那么你知道步进电机有哪些型号吗?又是如何定义的呢?本文主要介绍步进电机型号定义及选择,首先介绍的是步进电机的特点及分类,其次阐述了步进电机的型号定义及说明,最后介绍了步进电机的选择及注意事项。 步进电机简介步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为步距角,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器。 步进电机的特点1、一般步进电机的精度为步进角的3-5%,且不累积。 2、步进电机外表允许的最高温度。步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。 3、步进电机的力矩会随转速的升高而下降。当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。 4、步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声。
步进电机加减速控制
1 加减速控制算法 1.1 加减速曲线 本设计按照步进电机的动力学方程和矩频特性曲线推导出按指数曲线变化的升降速脉冲序列的分布规律,因为矩频特性是描述每一频率下的最大输出转矩,即在该频率下作为负载加给步进电机的最大转矩。因此把矩频特性作为加速范围下可以达到(但不能超过)的最大输出转矩来拟订升降速脉冲序列的分布规律,就接近于最大转矩控制的最佳升降速规律。这样能够使得频率增高时,保证输出最大的力矩,即能够对最大的力矩进行跟随,能充分的发挥步进电机的工作性能,使系统具有良好的动态特性。 由步进电机的动力学方程和矩频特性曲线,在忽略阻尼转矩的情况下,可推导出如下方程: 式中,为转子转动惯量,K为假定输出转矩按直线变化时的斜率,τ为决定升速快慢的时间常数,在实际工作中由实验来确定。fm为负载转矩下步进电机的最高连续运行频率,步进电机必须在低于该频率下运行才能保证不失步。(1)式为步进电机的升速特性,由此方程可绘制出电机升速曲线。(1)式表明驱动脉冲的频率f应随时间t作指数规律上升,这样就可以在较短的时间内使步进电机的转速上升至要求的运行速度。鉴于大多数的步进电机的矩频特性都近似线性递减的,所以上述的控制规律为最佳。 1.2 加减速离散处理 在本系统中,FPGA使用分频器的方式来控制步进电机的速度,升降速控制实际上是不断改变分频器初载值的大小。指数曲线由于无法通过程序编制来实现,可以用阶梯曲线来逼近升速曲线,不一定每步都计算装载值。 如图l所示,纵坐标为频率,单位是步/秒,其实反映了转速的高低。横坐标为时间,各段时间内走过的步数用N来表示,步数其实反映了行程。图中标出理想升速曲线和实际升速曲线。
正反转加减速步进电机(调好)
/*晶振:12M T1计时250微秒溢出中断一次;P1.01.1为增加,减少键,P3.0输出方波hz_shu 设定的频率数 T1_over_num: 根据设定频率计算后,定时器溢出的出次数值 T1_cnt; 定时器计数溢出数 sec_over_num; 一秒内的计数 second :连续按键的计时 state_val 连续按下的标志0=按键已经弹起;1=按键一直按下 led_seg_code 数码管7段码 **************************************************************/ #include "reg51.h" #include"math.h" sbit pulse_out=P2^0; //方波输出口 sbit zf=P2^1; //方向输出 sbit jiasu=P2^2; //按下加速 sbit jiansu=P2^3; //按下减速 sbit fangxiang=P2^4; //改变方向键 //-------------------- unsigned char data hz_shu,second,key_val,key_val_old; unsigned int data sec_over_num; unsigned int data T1_cnt,T1_over_num; unsigned char data state_val; #define uchar unsigned char #define uint unsigned int //char code led_seg_code[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; //------------------------ void delay(unsigned int i) { while(--i);} unsigned char scan_key() { unsigned char i,k; if(jiansu&&jiasu==1) { // i=P1; k=255; // if(i==0xff) 没有按下时i=P1=1 } // { else // k=255; //无键按下 { // } delay(10); // else //有键按下
步进电机加减速定位控制系统
1 绪论 1.1 课题描述 随着电子技术,特别是随大规模集成电路的产生而出现的微型计算机技术的飞速发展,人类生活发生了根本性的改变。如果说微型计算机的出现使现代科学研究得到了质的飞跃,那么可以毫不夸张地说,单片机技术的出现则是给现代工业测控领域带来了一次新的技术革命。目前,单片机以其体积小、重量轻、抗干扰能力强、对环境要求不高、高可靠性、高性能价格比、开发较为容易,在工业控制系统、数据采集系统、智能化仪器仪表、办公自动化等诸多领域得到极为广泛的应用,并已走人家庭,从洗衣机、微波炉到音响、汽车,到处都可见到单片机的踪影。因此,单片机技术开发和应用水平已逐步成为一个国家工业发展水平的标志之一。本课题研究的内容就是以单片机为主要控制元件,通过控制脉冲信号来定位步进电机。 1.2 步进电机参数和特点 1.2.1 基本参数 1.电机固有步距角[8] 它表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给出了一个步距角的值,电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为…电机固有步距角?,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。 2.步进电机的相数 是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72°。 3. 保持转矩(HOLDING TORQUE) 是指步进电机通电但没有转动时,定子锁住转子的力矩。 1.2.2 步进电机的特点
1.一般步进电机的精度为步进角的3-5%,且不累积。 2.步进电机外表允许的最高温度。 步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。 3.步进电机的力矩会随转速的升高而下降。 当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。 4.步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声。 步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。步进电机以其显著的特点,在数字化制造时代发挥着重大的用途。伴随着不同的数字化技术的发展以及步进电机本身技术的提高,步进电机将会在更多的领域得到应用。 2 总体方案设计 2.1 总体设计框图 为了实现步进电机的加减速定位控制功能,设计采用的如图2.1的设计框图。 本设计系统采用开环控制,利用AT89C51单片机作为脉冲分配器,通过功率接口控制四相步进电机的加减速运行。 键盘模块控制步进电机的起动、加速、停止、以及定位等各项功能的选择。 LCD显示器上实时的显示步进电机的运行转速和定位功能时候步进电机运行的转速和总的转数。
基于单片机的步进电机加减速的控制方法_李世忠
X 基于单片机的步进电机加减速的控制方法 李世忠,雷秀 (内蒙古工业大学,内蒙古呼和浩特010062) 摘要:根据步进电机驱动负载对加减速响应的高速要求,本文提出了一种基于单片机的步进电机加减速离散控制方法,经实验验证该方法可以解决步进电机快速加减速控制中常见的失步、堵转、噪声等问题。 关键词:单片机;步进电机;加减速控制;离散 中图分类号:TP273文献标识码:A文章编号:1007)6921(2005)07)0122)02 引言 步进电机具有快速启停能力强,精度高,转速容易控制的特点,在工业过程控制及仪表等领域中越来越得到广泛应用。但是在实际运行过程中,由于启动和停止控制不当,步进电机会出现启动时抖动和停止时过冲现象,影响了控制精度,尤其步进电机工作在频繁启动和停止时,这种现象就更为明显。因此步进电机的快速启动和停止控制仍是研究的课题之一,作者在完成/全闭式数控功率匹配液压节能技术0课题中,对步进电机的启动、停止控制进行研究,提出了一种基于单片机控制的步进电机加减速离散控制方法。经多次运行,达到预期目标。 1加减速曲线 步进电机的运行一般要经过加速、匀速、减速三个阶段。步进电机加减速曲线如图1所示,在图中,纵坐标是频率f,单位为脉冲/秒或步/秒,本质上是速度,横坐标是时间,单位为秒。步进电机以f0频率启动后,以加速度a加速,至t1时刻后达到最高运行频率f h,然后匀速运行,至t2时刻以加速度-a 减速,在t e时刻电机停转,总的步数为N,在停留t s 秒后重复前面的过程。其中从静止加速到最高运行频率和从最高运行频率到停止是控制的关键,通常采用匀加速和匀减速控制。 由图1可知加速阶段是个线性加速过程,其中频率和时间的关系可以表示如下: f=f0+at(1) 式中:f是瞬时速度(频率);f0是启动速度(频率);a是加速段;t 是加速时间。 图1步进电机加减速速度 2加减速过程的离散化处理 若单片机采用定时器中断方式来控制步进电机的速度,则加减速控制实际上是靠不断改变定时器的装载值的大小来实现的。考虑到单片机资源(字长)和编程的方便,不一定每步都计算定时器重装值,可以采用阶梯曲线来逼近加减速曲线[2],如图2所示,采用离散法将加减速曲线离散化,离散化以后速度是分档上升的,而且每升一档都要在该档(台阶)保持一段时间,保持这个速度稳定运行几个脉冲后才再升一级,这就克服了步进电机转子的转动惯量所引起的速度滞后,只有当实际运行速度达到了以后才能急速加速,实际上这也是局部速度误差的自动纠正。 由式(1)可知加速算法为 f r=f0+at r(2) 实际控制系统中,当最高运行频率为fh时,由(2)式可以算出加速时间 t r=(f h-f0)/a(3) 将加速段均匀的离散为n段,由式(3)可知上升时间为t r,则相邻两次速度变化的时间间隔为 122内蒙古科技与经济NMG KJYJJ X收稿日期:2004年12月27日 作者简介:李世忠(1977)),男,内蒙古工业大学机械电子工程专业,硕士。内蒙古自治区自然科学基金项目/液压系统能耗辨识与高效传动技术0[2001-10902-02]资助。