伺服电机控制系统中电流采样三种方案的比较

伺服电机控制系统中电流采样三种方案的比较
莱姆电子(中国)有限公司
罗 映 万超
(华南理工大学 广东 广州 510640)
摘 要: 伺服电机控制系统中,精确的电流采样是实现高性能闭环控制系统的关键。本文针对电流检测常用的三种方案进行了实验和比较,获得了三种方案各自优势和缺点的清晰认识,这对基于不同的条件选择合适的电流检测方案提供了参考。
关键字: 电机控制 伺服系统 电流环 电流检测
Comparison of the three schemes of current sampling in the controlling system of servo motor
LUO Ying Wan Chao
(South China university of technology, Guangzhou 510640 , China)
Abstract: in the controlling system of servo motor, accurate current sampling is the key of realizing the high-powered close loop controlling system. In this paper, aim at three normal schemes of current sampling, do some experiments and compare the results, then obtain very clear cognition about the advantages and the faults of the schemes respectively, that can supply the reference for choosing proper scheme of current sampling in the base of different situation. Key words: motor controlling, servo system, the loop of current, current sampling 1 前言
对于数字化伺服电机控制系统,转矩环的性能直接影响着系统的控制效果,电流采样的精度和实时性很大程度上决定了系统的动、静态性能,精确的电流检测是提高系统控制精度、稳定性和快速性的重要环节,也是实现高性能闭环控制系统的关键。在伺服电机控制系统中,电流检测的方案有多种,常见的一种方案是使用霍耳传感器[1],将电流信号经过电磁转换,变换为直流电压信号输出,然后,通过运放和比较器构成的处理电路处理后,输入到处理器;另一种方案是,取采样电阻两端的电压,经线性光藕或者隔离放大器进行信号隔离,调理后接A/D 转换器输入进行数字化,获取电流的采样值,而数字化的过程即可以利用处理器中的A/D 转换通道实现[3] [4],也可以利用根据 原理实现的模拟量直接转换为数字量的隔离调制芯片来实现[2]。本文通过对这三种方案分别进行电路设计和具体实验后所得结果的比较分析,对三种方案各自的特点有了清晰的认识,这有利于基于不同的条件选择合适的方案来提高伺服控制系统的整体性能。
2 伺服电机控制系统简介
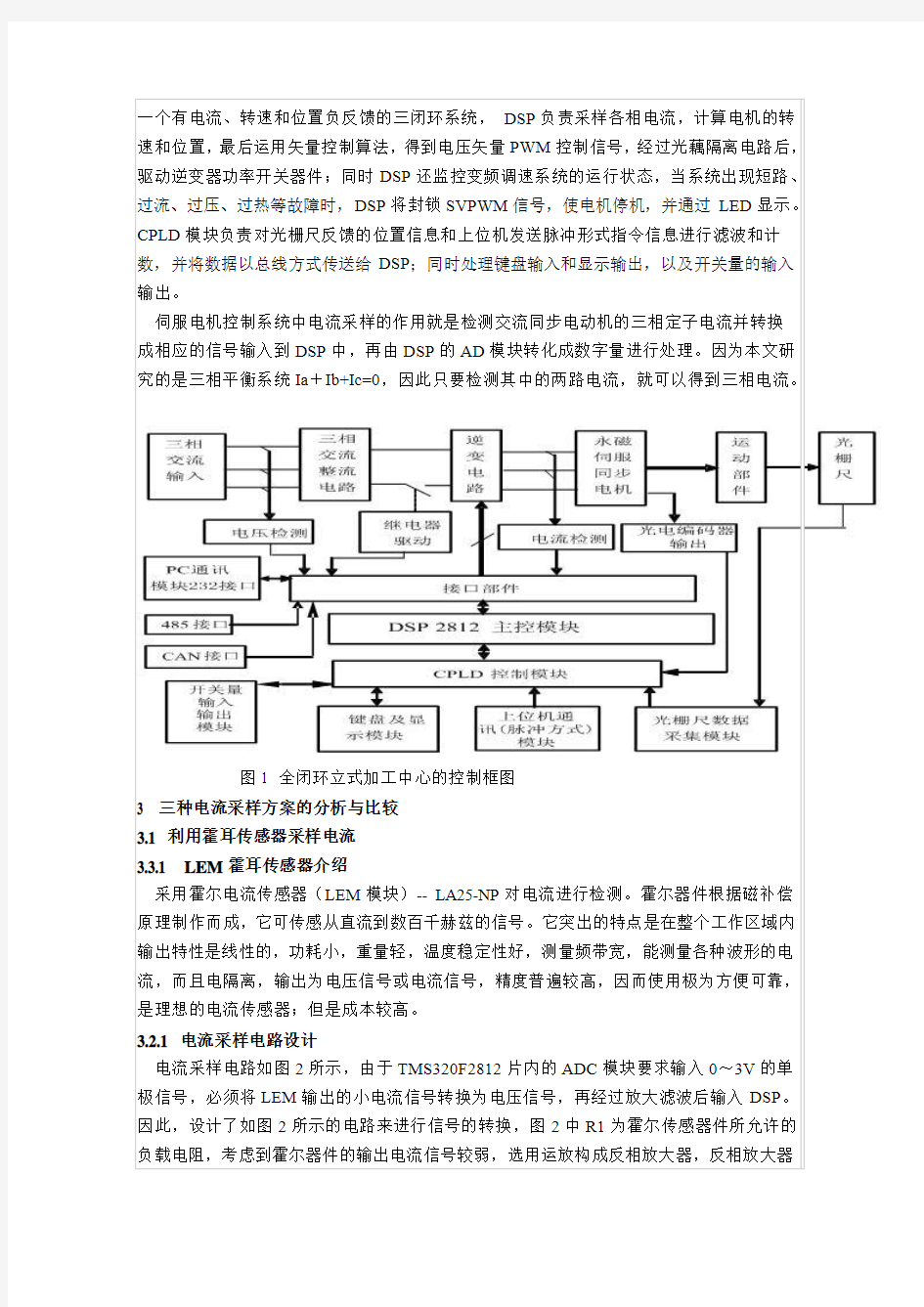
本系统采用交直交电压型变频电路,主电路由整流电路、滤波电路及智能功率模块IPM 逆变电路构成,控制部分以DSP 芯片TMS320LF2812为核心,CPLD 作为辅助处理模块,构成功能齐全的全数字矢量控制系统,系统结构如图1所示,从图1可以看出,本系统是
一个有电流、转速和位置负反馈的三闭环系统,DSP负责采样各相电流,计算电机的转速和位置,最后运用矢量控制算法,得到电压矢量PWM控制信号,经过光藕隔离电路后,驱动逆变器功率开关器件;同时DSP还监控变频调速系统的运行状态,当系统出现短路、过流、过压、过热等故障时,DSP将封锁SVPWM信号,使电机停机,并通过LED显示。CPLD模块负责对光栅尺反馈的位置信息和上位机发送脉冲形式指令信息进行滤波和计数,并将数据以总线方式传送给DSP;同时处理键盘输入和显示输出,以及开关量的输入输出。
伺服电机控制系统中电流采样的作用就是检测交流同步电动机的三相定子电流并转换
成相应的信号输入到DSP中,再由DSP的AD模块转化成数字量进行处理。因为本文研究的是三相平衡系统Ia+Ib+Ic=0,因此只要检测其中的两路电流,就可以得到三相电流。
图1 全闭环立式加工中心的控制框图
3 三种电流采样方案的分析与比较
3.1 利用霍耳传感器采样电流
3.3.1 LEM霍耳传感器介绍
采用霍尔电流传感器(LEM模块)-- LA25-NP对电流进行检测。霍尔器件根据磁补偿原理制作而成,它可传感从直流到数百千赫兹的信号。它突出的特点是在整个工作区域内输出特性是线性的,功耗小,重量轻,温度稳定性好,测量频带宽,能测量各种波形的电流,而且电隔离,输出为电压信号或电流信号,精度普遍较高,因而使用极为方便可靠,是理想的电流传感器;但是成本较高。
3.2.1 电流采样电路设计
电流采样电路如图2所示,由于TMS320F2812片内的ADC模块要求输入0~3V的单极信号,必须将LEM输出的小电流信号转换为电压信号,再经过放大滤波后输入DSP。因此,设计了如图2所示的电路来进行信号的转换,图2中R1为霍尔传感器件所允许的负载电阻,考虑到霍尔器件的输出电流信号较弱,选用运放构成反相放大器,反相放大器
式过采样
SDAT变回高阻态,完成一次转换,转换时间Tc取决于所选的转换模式,最小为800nS。
.2.3 电流采样电路设计
电流采样硬件电路如图5所示,R7_1为3m的采样电阻,取其两端的电压输入7860,MC7805给7860输入端提供稳定的5V电源,R9和C4构成RC低通滤波器,经过A/D 转换隔离调制输出频率为10MHZ的时钟脉冲和一位数据流,通过接口芯片0872的转换处理,输出CS、SDAT和SCLK三路信号,接入到DSP的SPI接口,读取15位的数字
量。
3.2.4 电流采样实验波形
当采样电阻两端为100mV输入,采样电阻精确度高、温漂小的条件下,输出的波形如图6所示。隔离型A/D转换器能直接将模拟量转化为数字量输出,波形稳定,输入数字量偏差小,数据准确度较高。
3.3 利用采样电阻结合隔离调制芯片及放大处理电路采样电流
3.3.1 7840芯片介绍[6]
HCPL27840芯片是安捷伦公司的一款集成隔离放大器,它有优越的性能,像CMRR、失调电压、非线性度、工作温度范围和工作电压等都有严格的指标。低失调电压和低失调温度系数允许自动校准技术的精确运用。5%的增益容忍度和0.1%的线性度,为精确的负反馈和控制进一步提供性能需求。较宽的温度范围允许HCPL7840被运用于各种恶劣的工作环境。
HCPL-7840包含有一个A/D转换器,同时还匹配有一个D/A转换器,工作原理如图7所示, 输入直流信号经过调制器送至编码器量化、编码,在时钟信号控制下,以数码串的形式传送到发光二极管,驱动发光二极管发光。由于电流强度不同,
发光强度也不同,在解调端有一个光电管会检测出这一变化,将接收到的光信号转换成电信号,然后送到解码器和D/A转换器还原成模拟信号,经滤波后输出。干扰信号因电流微弱不足以驱动发光二极管发光,因而在解调端没有对应的电信号输出,从而被抑制掉。所以在输出端得到的只是放大了的有效的直流信号。
3.3.2 电流采样电路设计
电流采样电路如图8所示,Rsense为3m采样电阻,取其两端的电压输入7840,MC7805给7860输入端提供稳定的5V电源,R5和C3实现RC低通滤波,经过转换隔离调制输出差分电压信号,通过运放MC34081实现差分放大,由于TMS320LF2812的ADC模块要求输入0~3V的单极信号,所以在运放的正相端通过可调电阻接入1.5V的参考电压,即当输入电流为0时,运放输出的电压为1.5V,然后将单极电压信号接入DSP的A/D通道进行转换,获得电流采样值。
3.3.3 电流采样实验数据
如表2所示,为电流采集实验数据,当采样电阻中通入电流,采样其两端的电压值,7840的差分输出电压值是输入电压的8倍,运放MC34081组成的差分放大电路的放大系数为5,所以运放输出的电压与参考电压的差值为实际电压值的40倍。由表2中数据可以得出,与理论值相比较,相对误差小,说明当采样电阻精确度高、温漂小的条件下,采用光藕隔离放大芯片7840检测电流具有较高的准确度。
4 结论
综上所述,采用霍尔电流传感器(LEM模块)采样电流,线性度好、功耗小,温度稳定性好,精度普遍较高,是较为理想的电流传感器,但是成本较高;HCPL-7860的隔离型A/D转换器能直接将模拟量转化为数字量输出,从而避免了某些场合下所需要附加的A/D转换器,可靠性高,抗干扰能力强;而采用HCPL-7840采样电流,同样具有较高的精度,且抗共模抑制比的能力较强,跟LEM模块比较,它更适合于电机电流的检测;后两种方案成本较低,具有很高的性价比,但是,这两种方案都需要精确度高、温漂小的四端采样电阻为条件,才能实现精确测量的目的,普通的两端采样电阻会极大影响采样的准确性,而且采样电阻的取值要考虑最小的功率损耗和最大的准确性的折中点,较难掌握。所以,伺服电机控制系统中电流采集方案的选择。
参考文献
[1] 赵文祥,刘国海基于DSP的全数字矢量SVPWM变频调速系统电机与控制学报2004.6
[2] 张春李晓林基于HCPL-7860/70的隔离信号采集的设计应用能源技术2004.5
[3] 赵云丽,欧阳斌林基于线性光电耦合器的电流检测电路东北农业大学学报2006.2
[4] 姜久红朱若燕光耦隔离运放在电机电流采集中的应用微计算机信息2004.6
[5] HCPL-7860/0872的技术手册
[6] HCPL-7840的技术手册
伺服电机控制跟变频器控制原理上的区别
伺服电机控制跟变频器控制原理上的区别 伺服的基本概念是准确、精确、快速定位。变频是伺服控制的一个必须的内部环节,伺服驱动器中同样存在变频(要进行无级调速)。但伺服将电流环速度环或者位置环都闭合进行控制,这是很大的区别。除此外,伺服电机的构造与普通电机是有区别的,要满足快速响应和准确定位。现在市面上流通的交流伺服电机多为永磁同步交流伺服,但这种电机受工艺限制,很难做到很大的功率,十几KW以上的同步伺服价格及其昂贵,这样在现场应用允许的情况下多采用交流异步伺服,这时很多驱动器就是高端变频器,带编码器反馈闭环控制。所谓伺服就是要满足准确、精确、快速定位,只要满足就不存在伺服变频之争。 两者的共同点: 交流伺服的技术本身就是借鉴并应用了变频的技术,在直流电机的伺服控制的基础上通过变频的PWM方式模仿直流电机的控制方式来实现的,也就是说交流伺服电机必然有变频的这一环节:变频就是将工频的50、60HZ的交流电先整流成直流电,然后通过可控制门极的各类晶体管(IGBT,IGCT等)通过载波频率和PWM调节逆变为频率可调的波形类似于正余弦的脉动电,由于频率可调,所以交流电机的速度就可调了(n=60f/p ,n转速,f频率,p 极对数) 二、谈谈变频器: 简单的变频器只能调节交流电机的速度,这时可以开环也可以闭环要视控制方式和变频器而定,这就是传统意义上的V/F控制方式。现在很多的变频已经通过数学模型的建立,将交流电机的定子磁场UVW3相转化为可以控制电机转速和转矩的两个电流的分量,现在大多数能进行力矩控制的著名品牌的变频器都是采用这样方式控制力矩,UVW每相的输出要加霍尔效应的电流检测装置,采样反馈后构成闭环负反馈的电流环的PID调节;ABB的变频又提出和这样方式不同的直接转矩控制技术,具体请查阅有关资料。这样可以既控制电机的速度也可控制电机的力矩,而且速度的控制精度优于v/f控制,编码器反馈也可加可不加,加的时候控制精度和响应特性要好很多。 三、谈谈伺服: 驱动器方面:伺服驱动器在发展了变频技术的前提下,在驱动器内部的电流环,速度环和位置环(变频器没有该环)都进行了比一般变频更精确的控制技术和算法运算,在功能上也比传统的变频强大很多,主要的一点可以进行精确的位置控制。通过上位控制器发送的脉冲序列来控制速度和位置(当然也有些伺服内部集成了控制单元或通过总线通讯的方式直接将位置和速度等参数设定在驱动器里),驱动器内部的算法和更快更精确的计算以及性能更优良的电子器件使之更优越于变频器。 电机方面:伺服电机的材料、结构和加工工艺要远远高于变频器驱动的交流电机(一般交流电机或恒力矩、恒功率等各类变频电机),也就是说当驱动器输出电流、电压、频率变化很快的电源时,伺服电机就能根据电源变化产生响应的动作变化,响应特性和抗过载能力远远高于变频器驱动的交流电机,电机方面的严重差异也是两者性能不同的根本。就是说不是变
电力用户用电信息采集系统工程建设实施方案
电力用户用电信息采集系统2010年工程建设实施方案 江苏省电力公司 二〇一〇年二月
1 概述 1.1 编写目的 电力用电信息采集系统2010年工程建设实施方案,是在遵循国家电网公司“电力用户用电信息采集系统”各类设计成果的基础上形成的文档,用以明确用电信息采集系统建设的目标及范围,确定项目的组织方式和组织结构,明确项目各阶段目标以及各工作领域的工作内容,确定合适的项目管理过程和管理办法,并确立项目执行、监督、控制的方式和方法。 1.2 项目背景 建设“电力用户用电信息采集系统”(以下简称“采集系统”),实现计量装置在线监测和用户负荷、电量、电压等重要信息的实时采集,及时、完整、准确地为“SG186”信息系统提供基础数据;实现电费收缴的全面预控,为智能电费结算等营销业务策略的实施提供技术基础,为推进双向互动营销、实施更具竞争力的市场营销策略、优化完善营销业务奠定基础。从而为企业经营管理各环节的分析、决策提供支撑,提升快速响应市场变化、快速反映客户需求的互动能力。 国网公司对采集系统建设要求是按照“统一规划、统一标准、统一建设”的原则,实现电力客户用电信息采集的“全覆盖、全采集、全费
控”。 加快采集系统建设是推进“两个转变”、实施“三集五大”的必然选择,是统一坚强智能电网建设的重要内容,是支撑阶梯电价执行的基础条件,加强精益化管理、提高优质服务水平的必要手段,是延伸电力市场、创新交易平台的重要依托。 加快采集系统建设,已成为建设“大营销”体系和统一坚强智能电网,实现公司发展方式和电网发展方式转变的必然要求。 1.3 建设目标 总体目标 依据国网公司用电信息采集系统建设的总体规划,利用5年时间(2010~2014),建设建成电力用户用电信息采集系统,覆盖公司系统全部用户、实现用电信息实时采集、全面支持预付费控制,即“全覆盖、全采集、全费控”。 具体目标 根据国网公司项目核准,2010年应完成475万户居民用户的用电信息采集系统建设,实现用户用电信息的全面准确采集,全面支持阶梯电价、预付费业务。 1.4 建设原则
各种电压电流采样电路设计
常用采样电路设计方案比较 配电网静态同步补偿器(DSTATCOM)系统总体硬件结构框图如图2-1所示。由图2-1可知DSTATCOM的系统硬件大致可以分成三部分,即主电路部分、控制 电路部分、以及介于主电路和控制电路之间的检测与驱动电路。其中采样电路包括3路交流电压、6路交流电流、2路直流电压和2路直流电流、电网电压同步信号。3路交流电压采样电路即采样电网三相电压信号;6路交流电流采样电路分别为电网侧三相电流和补偿侧三相电流的电流采样信号;2路直流电压和2路直流电流的采样电路DSTATCOM的桥式换流电路的直流侧电压信号和电流信号;电网电压 同步信号采样电路即电网电压同步信号。 信号调 理 TMS320 LF2407A DSP 键盘显示 电路电压电流信号驱动电路保护电路 控制电路检测与驱动 电路主电路 图2-1 DSTATCOM系统总体硬件结构框图 1.1常用电网电压同步采样电路及其特点 1.1.1 常用电网电压采样电路 1 从D-STATCOM的工作原理可知,当逆变器的输出电压矢量与电网电压矢 量幅值大小相等,方向相同时,连接电抗器内没有电流流动,而D-STATCOM 工作在感性或容性状态都可由调节以上两矢量的夹角来进行控制,因此,逆变 器输出的电压矢量的幅值及方向的调节都是以电网电压的幅值和方向作为参考的,因此,系统电压与电网电压的同步问题就显得尤为重要。
图2-2 同步信号产生电路1 从图2-2所示同步电路由三部分组成,第一部分是由电阻、电容组成的RC滤波环节,为减小系统与电网的相位误差,该滤波环节的时间常数应远小于系统 的输出频率,即该误差可忽略不计。其中R5=1K,C4=15pF,则时间常数错误!未找到引用源。< 第1章通信信道及接口 通信网络主站、采集传输终端、电能表,是信息交互的承载体。通信网络的主要方式有光纤通信、230MHz无线通信、公网无线通信、载波通信等。 图 1. 远程、本地通信说明图 远程通信是指采集终端和系统主站之间的数据通信。可分为专网通信及公网通信。 本地通信是指采集终端和用户电能计量装置之间的数据通信,在本系统中主要集中器和采集器、集中器和电能表、采集器和电能表之间的通信。 1.1通信信道建设原则 通信通道的建设以满足系统需求为出发点,综合考虑技术成熟、实时性、通信安全、分布围、系统可维护、工程建设简易、造价经济以及面向企业发展等因素,根据各网省公司的现实情况选择组件通信网络平台,为低压集抄系统提供稳 定可靠的数据交互通道。 1)易于安装 指通信网络中相关的设备在初次安装、故障或周期轮换时,安装和参数配置 的难易程度。主要表现在各种设备的即插即拔特性和网络系统自适应能力上。 2)易于维护 指当系统应用需求发生变更时,计量仪表和系统维护的难易程度。如因价格 体系或结算周期发生变更时,造成的费率结构和冻结时间在线或离线调整。 3)系统兼容性 指对采集系统中各种采集和传输终端通信方式的兼容性,以及能够适应未来 通信技术的不断发展。 4)标准化的接口 通信网络系统各个设备之间的互联接口应采用标准接插件或者是事实上的 标准接插件。 5)一体化通信 通信网络系统是采集主站、采集终端、计量表计之间通信的载体,由于管理需求和用户性质的不同,三者之间能够采用的通信信道媒介差别很大,为保持主站系统的数据采集功能的专一性,建立一体化的通信机制,保证采集主站可以通 过标准的统一的方式透明地和采集终端和计量表计通信。 6)经济性 通信网络系统在满足系统需求和立足长远发展的基础上,所选用的网络系统应该具有相对好的经济性。 为适应各种通信方式的需要在主站数据采集服务器和集中器之间建立一个通信平台。通信平台以网桥的形式存在,综合处理转换采集服务器和远程通信网络之间的信息交换。 通信平台和主站采集服务器之间以IP网络方式相连接,通信平台经过处理转换之后根据远程网络情况采用适应的方式和集中器通信。实现采集服务器和集 抽样方案设计 所谓抽样设计,就是依据调查目的,在给定的人力、物力、财力等的条件下,在从一定总体中抽取样本资料以前,预先确定抽样程序和方案,在保证所抽取的样本有充分代表性的前提下,力求取得最经济、最有效的结果。 一般来说,抽样设计的主要内容及步骤如下: (一)定义目标总体 目标总体是指抽样设计者根据调查目的界定的调查研究对象的集合体。调查目的和范围对定义目标总体具有关键性的作用。目标总体是对整个研究具有重大意义的群体,它们之所以有重要的地位,是因为我们可以从它们身上收集到对研究有关键用途的信息。另外,还有一些因素可能也会影响我们界定目标总体,如研究的主题、时间等。 (二)决定抽样框 目标总体选定后就需要由抽样框执行了。抽样框是抽样调查前在可能条件下作出的抽样单位一览表或一览图,即由抽样单位构成的名录。例如,以杭州市医师为抽样单位,则杭州市医师名册便是抽样框。如果以学校班级为抽样单位,则学校所有班级名册便是抽样框。抽样框既可以是一份包含所有抽样单位的名单,也可以是一张地图或其他适当的形式,如电话簿的列表、餐厅的菜单、包含公司所有客户名单的数据库或是电子数据库的目录等。无论是哪种形式,抽样框中的抽样单位必须是有序的,以便于编号。抽样单位是指在抽取样本前将总体依据一定标准分成若干部分,其中的每一部分称为一个抽样单位。各个抽样单位彼此不能交叉,所有这些抽样单位加总起来构成一个总体。抽样单位由抽样的组织形式决定,如果采用单纯随机抽样形式,抽样单位就是调查对象中的每个个体;如果采用分层抽样形式,抽样单位就是总体中的每个层;如果采用整群抽样形式,抽样单位就是总体中的每个群。 抽样框是组织抽样调查的重要依据,调查者必须对其抱有严谨的态度,认真地收集和编制。因为抽样框一旦有重复和遗漏,必然会直接影响到样本的选取,从而影响到整个抽样工作的质量。 抽样框根据其划分标准的不同,可以在不同层面上进行构建,从而使抽样框呈现不同等级,不同等级的抽样框可以用于各级抽样。 就目前的市场调查现场执行而言,有三种常用的抽样框:地图块、居委会块、居民户。 1.地图块 地图块是指在市场调查所涉及的行政区划范围内,将地图按一定标准划分为若干块,使各块具有相近的居民户数,每一块作为一个基本的抽样单位,各块的总和即为抽样框。地图块抽样框构建常用的方法有两种:一种是“行政区划法”,即以区、街道(镇)等作为基本抽样单位构建抽样框;另一种是“道路地块法”,即以道路、河流、铁路等明显的线状标志物为界限划定各个抽样单位。这种区划法的优点在于可以较合理地划定地图块的大小,如按该地图块内的人口密度确定地图块面积的大小等等,从而使各地图块内的居民户数达到基本相同,使样本单位之间具有可比性。据统计,在实际中采用道路地块法抽样时,由于拒访、行业限制、拆迁、界限不清等原因,约有1/3的居民户不能访问,故在实际确定每地块居民户数时,应考虑以上因素。 2.居委会块 居委会块是指以居委会所辖地域作为抽样的基本单位,其总体即构成抽样框。 3.居民户 居民户是指以某区域住户名单为抽样的基本单位,其总体即构成抽样框。这里所指的名单不一定是居住户的姓名,而有可能是居住户的门牌号、室号。这一形式的抽样框往往缺乏现成的资料,需要连续地进行资料积累和完善,并且不断地进行修订。 FOC控制基于电阻的电流采样方案比较 ————————————————————————————————作者:————————————————————————————————日期: FOC控制基于电阻的电流采样方案比较 最近有时间把TI ST还有Microchip三家关于PMSM控制中使用电阻采样相的电路看了一下,发现各家都有自己的特点,就做个总结吧。 1.TI C2000系列双电阻采样法 原理说明 在U相和V相的下桥分别串联一个功率电阻,通过一个运放电路连接至A/D。采样时机放在PWM的下溢中断进行,U V两相电阻上的电流即为电机U V相的线电流。 关键点 (1)采样时机: 必须在下桥臂全部导通的时候进行采样。 在软件设计的时候,采用下溢中断(处于第7段和第1段零矢量区域中),将电流采样的任务安排在一个PWM周期的开始处,在比较匹配到来之前的期间,U、V两相的上桥臂都是关断的,也就是说下桥臂是导通的,这样就可以在每个PWM周期顺利采样一次两个相电流值。 (2)采样方式 因为电机绕组线圈呈感性,线圈上的相电流不能突变,因此从矢量U0 转换到零矢量后,其对应的工作状态转换如图所示,其中二极管能起到续流作用,此时,下桥臂采样电阻上流过的是相电流,因此在每个PWM周期前期通过下桥臂的采样电阻检测相电流是可行的。 开关状态为000时电流的流通路径 (3)采样电流电路 从上图可以看出,流经各相采样电阻的电流是正负的,故采样电阻上端的电压是一个带正负信号的正弦波形(下端为地),后级运放电路作用是将整体电压抬高,并且进行比例增益。 2.STM32的方案:三电阻采样法 伺服电机工作原理及和步进电机的区别 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降.。 请问交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制滚珠丝杆,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。永磁交流伺服电动机20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。 永磁交流伺服电动机同直流伺服电动机比较,主要优点有:⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。⑵定子绕组散热比较方便。⑶惯量小,易于提高系统的快速性波纹管联轴器。⑷适应于高速大力矩工作状态。 ⑸同功率下有较小的体积和重量。 伺服和步进电机 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。 步进电机是一种离散运动的装置,它和现代数字控制技术有着本质的联系。在目前国内的数字控制系统中,步进电机的应用十分广泛。随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。虽然两者在控制方式上相似(脉冲串和方向信号)弹性联轴器,但在使用性能和应用场合上存在着较大的差异。现就二者的使用性能作一比较。 一、控制精度不同 两相混合式步进电机步距角一般为3.6°、1.8°,五相混合式步进电机步距角一般为0.72 °、0.36°。也有一些高性能的步进电机步距角更小。如四通公司生产的一种用于慢走丝机床的步进电机,其步距角为0.09°;德国百格拉公司(BERGER LAHR)生产的三相混合式步进电机其步距角可通过拨码开关设置为1.8°、0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了两相和五相混合式步进电机的步距角。 交流伺服电机的控制精度由电机轴后端的旋转编码器保证。以松下全数字式交流伺服电机为例,对于带标准2500线编码器的电机而言,由于驱动器内部采用了四倍频技术,其脉冲当量为360°/10000=0.036°。对于带17位编码器的电机而言,驱动器每接收217=131072个脉冲电机转一圈,即其脉冲当量为360°/131072=9.89秒。是步距角为1.8°的步进电机的脉冲当量的1/655。 二、低频特性不同 步进电机在低速时易出现低频振动现象。振动频率与负载情况和驱动器性能有关,一般认为振动频率为电机空载起跳频率的一半。这种由步进电机的工作原理所决定的低频振动现象对于机器的正常运转非常不利。当步进电机工作在低速时,一般应采用阻尼技术来克服低频振动现象,比如在电机上加阻尼器,或驱动器上采用细分技术等。 交流伺服电机运转非常平稳膜片联轴器,即使在低速时也不会出现振动现象。交流伺服系统具有共振抑制功能,可涵盖机械的刚性不足,并且系统内部具有频率解析机能(FFT),可检测出机械的共振点,便于系统调整。 三、矩频特性不同 抽样方案设计模版 导语:生命需要保持一种激情,这激情能让别人感到你是不可阻挡的时候,就会为你的成功让路!一个人内心不可屈服的气质是可以感动人的,并且能够改变很多东西。以下小编为大家介绍抽样方案设计模版文章,欢迎大家阅读参考! 抽样方案设计模版一、总体部署 统筹兼顾,分类抽检 为提高抽样检验工作的系统性、针对性和有效性,根据食品安全风险程度和食品安全整顿工作的需要,食品抽样检验分为日常监督抽检、专项监督抽检。其中日常监督抽检是指依据相关抽检标准和抽检计划开展的抽样检验;专项监督抽检是根据食品安全整顿工作和处置食品安全突发事件需要而组织开展的不定期抽样检验。抽样检验将借助各类快速检测仪器、试剂,对蔬菜、乳制品等保质期短、消费量大、食品安全风险相对较高的食品和农产品进行的质量监督筛查。 覆盖全面,突出重点 食品抽样检验要以与人民群众日常消费关系密切的食品为重点,同时涵盖其他类食品。在抽检对象上,以超市卖场和集贸、批发市场销售的食品为主;在检验指标上,以农药残留、食品添加剂以及其他危害人体健康的安全性指标为 主。各相关成员单位要根据辖区食品安全监管的具体情况,合理安排抽样地点和数量,均衡分布,使抽样结果能全面反映辖区食品安全的整体状况。同时根据食品安全风险程度的不同,增加“高风险”食品及重点地区的抽检频次、抽检数量和检测项目。 科学严谨,注重实效 严格按照抽检计划开展食品抽样检验及快速检测工作,确保程序合法、数据客观、记录清晰。把抽样检验和快速检测工作与日常监管工作紧密结合起来,根据食品安全监管工作的需要和食品安全状况,适时调整抽样检验工作计划,进一步增强抽样检验工作的针对性和有效性。对抽样检验不合格的食品,要及时报告相关部门,并予以处理。 二、抽检任务 20xx年食品抽样检验任务由各相关成员单位完成,各单位全年抽样检验不得少于240批,每月抽样检验不少于20批。区水务局、区食品药监局、工商分局、质监分局对各自部门职权范围内的食品进行抽样检测。根据食品的消费数量和食品安全风险程度,将食品分为ⅰ类、ⅱ类。 1、ⅰ类食品主要指粮食、蔬菜、熟食制品、豆制品、乳及乳制品、食用植物油等与群众关系密切,每日必须消费或消费量大的食品。 2、ⅱ类食品是指酒类等群众消费量相对较低的食品。 选购要点:伺服电机的三种控制方式 伺服电机速度控制和转矩控制都是用模拟量来控制的,位置控制是通过发脉冲来控制的。具体采用什么控制方式要根据客户的要求以及满足何种运动功能来选择。接下来,松文机电为大家带来伺服电机的三种控制方式。 如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。 如果对位置和速度有一定的精度要 求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。 如果上位控制器(在一个运动控制系统中“上位控制”和“执行机构”是系统中举足轻重的两个组成部分。“执行机构”部分一般不外乎:步进电机,伺服电机,以及直流电机等。它们作为执行机构,带动刀具或工件动作,我们称之为“四肢”;“上位控制”单元的四种方案:单片机系统,专业运动控制PLC,PC+运动控制卡,专用控制系统。“上位控制”是“指挥”执行机构动作的,我们也称之为“大脑”。 随着PC(Personal Computer)的发展和普及,采用PC+运动控制卡作为上位控制将是运动控制系统的一个主要发展趋势。这种方案可充分利用计算机资源,用于运动过程、运动轨迹都比较复杂,且柔性比较强的机器和设备。从用户使用的角度来看,基于PC机的运动控制卡主要是功能上的差别:硬件接口(输入/输出信号的种类、性能)和软件接口(运动控制函数库的功能函数)。按信号类型一般分为:数字卡和模拟卡。数字卡一般用于控制步进电机和伺服电机,模拟卡用于控制模拟式的伺服电机;数字卡可分为步进卡和伺服卡,步进卡的脉冲输出频率一般较低(几百K左右的频率),适用于控制步进电机;伺服卡的脉冲输出频率较高(可达几兆的频率),能够满足对伺服电机的控制。目前随着数字式伺服电机的发展和普及,数字卡逐渐成为运动控制卡的主流。)有比较好的闭环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。 就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的 FOC控制基于电阻的电流采样方案比较 最近有时间把TI ST还有Microchip三家关于PMSM控制中使用电阻采样相的电路看了一下,发现各家都有自己的特点,就做个总结吧。 1.TI C2000系列双电阻采样法 原理说明 在U相和V相的下桥分别串联一个功率电阻,通过一个运放电路连接至A/D。 采样时机放在PWM的下溢中断进行,U V两相电阻上的电流即为电机U V相的线电流。 关键点 (1)采样时机: 必须在下桥臂全部导通的时候进行采样。 在软件设计的时候,采用下溢中断(处于第7段和第1段零矢量区域中),将电流采样的任务安排在一个PWM周期的开始处,在比较匹配到来之前的期间,U、V两相的上桥臂都是关断的,也就是说下桥臂是导通的,这样就可以在每个PWM周期顺利采样一次两个相电流值。(2)采样方式 因为电机绕组线圈呈感性,线圈上的相电流不能突变,因此从矢量U0 转换到零矢量后,其对应的工作状态转换如图所示,其中二极管能起到续流作用,此时,下桥臂采样电阻上流过的是相电流,因此在每个PWM周期前期通过下桥臂的采样电阻检测相电流是可行的。 开关状态为000时电流的流通路径 (3)采样电流电路 从上图可以看出,流经各相采样电阻的电流是正负的,故采样电阻上端的电压是一个带正负信号的正弦波形(下端为地),后级运放电路作用是将整体电压抬高,并且进行比例增益。 2.STM32的方案:三电阻采样法 (1)电流处理: 采样电阻上端采集到的电压是一个带正负的正弦波形,所以其后端一定要接一个运放电路,一方面是滤波,更重要的则是把采集到的信号缩放到AD能采集的电压范围。这个电路可以采用同相比例放大+偏移。 (2)AD触发: 在STM32的高级定时器中,除了产生三相PWM波的CH1,CH2,CH3之外还有一个CH4,这个通道只能产生一路PWM波,它可以用来触发AD,可以比较容易的和前面几个PWM波同步,而且配置好周期能非常灵活的取采样点。(3)相采样选择: 用电信息采集系统采集成功率提升管理(智能召测)方案 合肥大多数信息科技有限公司 一、前言 随着阶梯电价的全面执行。国家电网加大对抄表及时率、准确率和电费差错率的稽查与考核力度,加强居民零电量、电量突增突减等异常情况核查力度,严格按规定时限办结业务,杜绝估抄、漏抄、错抄等人为原因引起的电费差错和客户纠纷。 智能电表的全面覆盖。智能电表更换和采集建设的大力深化落实,则为阶梯电价的实施提供技术支持,同时其作为智能电网建设的重要基础设备,加快智能电表更换工作也对电网进一步实现信息化、自动化、智能化具有重要支撑作用。 用电信息采集系统作为智能电表深化应用综合平台,其不可忽视的信息枢纽地位日益凸显,围绕用电信息采集的工作也在紧锣密鼓的开展中,采集成功率则是其中的重要指标。但在实际运行过程中,因计划停电、故障停电、网络传输等因素的影响,使原本可以采集成功的终端无法正常采集数据,针对此类情况,专职人员首先要保证补召工作的落实到位,其次要实时掌控每个采集终端的运行状态,时刻关注各供电所台区、专变采集成功率,对离线终端、连续采集失败的终端进行归类总结,做到第一时间发现问题、发现问题及时解决、分析问题杜绝避免,才能有效提升采集成功率。 二、项目背景 随着用电信息采集系统的全面上线,抄表工作由最先的手工抄表逐步转向远采集抄,其独有的远程自动抄表方式极大程度提高了抄表效率,自动抄表可谓是其核心价值的重要体现。然而目前在实际运行中却存在着一些问题,比如因停电、网络传输、接线不当、违规操作而导致采集成功率低下,因为不用去现场抄表原因,导致电工对台区的管理力度有所降低,无法在第一时间发现问题,这在一定程度上牵制了采集成功率的提升。 采集成功率得不到保障,那么用电信息采集系统就不能有效实现其核心价值,虽然通过系统内置的自动补招和专职人员手工补招的方式能对此进行暂时弥补,但这样一来,专职人员加班加点,人力资源无法得到合理利用,依靠体力做事的比重偏大,工作时间的投入与最终产出不均衡,渐渐进入发现问题、弥补问题的不良循环中。 在这样的背景下,如何从技术、管理、创新三个方面融合贯通,建立科学、系统、 空气采样探测器设计方案 极早期主动式空气采样感烟探测系统技术方案 一、项目概述 本项目为暗室工程新建项目~单层高度20米以上~考虑到防火要求~因空间高~不宜采用普通点型火灾探测设备~为达到暗室高大空间的火灾防护能力~最大限度的减少~避免火灾隐患~确保整个火车站正常运营状态。我方采用了澳大利亚Vision生产的极早期主动式空气采样感烟探测系统VESDA对大楼火灾系统进行监控。利用VESDA系统先进的探测技术~卓越的探测性能对高大空间提供可靠的保障。系统主要由安装在现场的VESDA标准型探测器和设置在主站房一层消防控制室的集中监控微机组成。整个系统连接成一个网络~可以通过监控微机对全部前端探测器进行编程~监控和维护等工作。 二、方案设计依据 本方案在设计过程中依据了下列相关文件 , 《火灾自动报警系统设计规范,GB50116,98,》 , 《火灾自动报警系统施工及验收规范,GB 50166,92,》 , 《火灾报警器通用技术条件,GB4717,1993,》 , 《消防联动控制设备通用技术条件 GB16806,1997》 , 《VESDA System Design Manual Version 2.2》,Vision公司 设计手册, , 《VESDA设计规范2002》,北京华脉金威公司企业标准, , 《VESDA施工及验收规范2002》,北京华脉金威公司企业标准, 三、 VESDA产品功能及介绍 3.1. 综述 VESDA——VERY EARLY SMOKE DETECTION APPARATUS~中文翻译为:极早期的烟雾探测设备~这是根据产品的功能而起的名字。而根据其原理特点~也称其为主动吸气式或采样式烟雾探测器。 澳大利亚Vision公司生产的VESDA的第一代产品早在七十年代就已研制出来了。在1983年就已开始推向全球~并被广泛采用。VESDA以其先进的技术和完善的品质享有最高声誉~成为保障高价值财产和重要设备设施安全的第一选择。 3.2. 燃烧过程的认识 火情的发展一般分为四个阶段:不可见烟,阴燃,阶段、可见烟阶段、明火阶段和高温阶段。上图展示了火灾的整个演变过程。传统的火灾报警系 火灾发展趋势与VESDA探测范围示意图 统通常是在可见烟阶段才能探测到烟雾~发出警报~此时火情所造成巨大的经济和财产损失已不可避免。请注意:在此之前~不可见烟阶段给我们提供了充裕的时间~VESDA可以及早探测险情~并控制火情的发生和曼延。 伺服电机的PLC控制方法 以松下Minas A4系列伺服驱动器为例,介绍PLC控制伺服电机的方法。伺服电机有三种控制模式:速度控制,位置控制,转矩控制{由伺服电机驱动器的Pr02参数与32(C-MODE)端子状态选择},本章简要介绍位置模式的控制方法 一、按照伺服电机驱动器说明书上的"位置 控制模式控制信号接线图"连接导线 3(PULS1),4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC 的输出端子)。 5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻),SIGN2连接控制器(如PLC的输出端子)。当此端子接收信号变化时,伺服电机的运转方向改变。实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。 7(com+)与外接24V直流电源的正极相连。 29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。 上面所述的六根线连接完毕(电源、编 码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。构成更完善的控制系统。 二、设置伺服电机驱动器的参数。 1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。 2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也 电力用户用电信息采集系统方案介绍 1 第1章通信信道及接口 通信网络链接主站、采集传输终端、电能表,是信息交互的承载体。通信网络的主要方式有光纤通信、230MHz无线通信、公网无线通信、载波通信等。 图 1. 远程、本地通信说明图 远程通信是指采集终端和系统主站之间的数据通信。可分为 2 专网通信及公网通信。 本地通信是指采集终端和用户电能计量装置之间的数据通信,在本系统中主要集中器和采集器、集中器和电能表、采集器和电能表之间的通信。 1.1通信信道建设原则 通信通道的建设以满足系统需求为出发点,综合考虑技术成熟、实时性、通信安全、分布范围、系统可维护、工程建设简易、造价经济以及面向企业发展等因素,根据各网省公司的现实情况选择组件通信网络平台,为低压集抄系统提供稳定可靠的数据交互通道。 1)易于安装 指通信网络中相关的设备在初次安装、故障或周期轮换时,安装和参数配置的难易程度。主要表现在各种设备的即插即拔特性和网络系统自适应能力上。 2)易于维护 指当系统应用需求发生变更时,计量仪表和系统维护的难易程度。如因价格体系或结算周期发生变更时,造成的费率结构和冻结时间在线或离线调整。 3)系统兼容性 指对采集系统中各种采集和传输终端通信方式的兼容性,以及能够适应未来通信技术的不断发展。 3 4)标准化的接口 通信网络系统各个设备之间的互联接口应采用标准接插件或者是事实上的标准接插件。 5)一体化通信 通信网络系统是采集主站、采集终端、计量表计之间通信的载体,由于管理需求和用户性质的不同,三者之间能够采用的通信信道媒介差别很大,为保持主站系统的数据采集功能的专一性,建立一体化的通信机制,保证采集主站能够经过标准的统一的方式透明地和采集终端和计量表计通信。 6)经济性 通信网络系统在满足系统需求和立足长远发展的基础上,所选用的网络系统应该具有相对好的经济性。 为适应各种通信方式的需要在主站数据采集服务器和集中器之间建立一个通信平台。通信平台以网桥的形式存在,综合处理转换采集服务器和远程通信网络之间的信息交换。 通信平台和主站采集服务器之间以IP网络方式相连接,通信平台经过处理转换之后根据远程网络情况采用适应的方式和集中器通信。实现采集服务器和集中器之间的透明通信,屏蔽远程通信的通信方式差异。 采集服务器对集中器的寻址方式:在IP链路建立之后,以此为物理链路,按照集中器逻辑地址为目的地址进行寻址,通信平台根据 4 抽样设计方案 一、调查目的 了解大学生使用护肤品与化妆品的情况及护大学生对肤品与化妆品效果的需求与使用遇到的问题,并据此分析护肤品在大学生中的市场潜力和需求,并预测大学生使用护肤品与化妆品的发展趋势。 二、调查范围和内容 1、目标总体和调查总体 目标总体指所有武汉轻工业大学金银湖校区的大学生。具体包括在校就读的各年级大一大二大三在校大学生。调查总体为根据金银湖校区的大学生实际情况设计形成的抽样框。 2、调查内容 调查内容包括被调查人的性别和年级、大学生对护肤品和化妆品的态度、大学生使用护肤与化妆品的原因,大学生在何种情况下会尝试新品牌,大学生期望的护肤品的功能,效果、以及目前使用护肤品与化妆品的遇到的问题,及大学生的在护肤品与化妆品消费支出等。 三、抽样调查设计 第一步:确定抽样方法 调查决定采用多阶段抽样与整群抽样相结合的抽样方法进行方案设计,调查的最小单元为大学生。决定调查的各个阶段为年级、寝室、学生,在寝室利用随机数表抽取学生。 第二步:确定样本量及各阶段样本量的配置 按简单随机抽样时,抽样数越多,随机误差越小,以及结合学校的学生人数,并在考虑到费用与人力,调查方便,准确的情况下,我们将问卷数定在三百份。各阶段的配置分别为: 初级单元:大一大二大三三个年级 二级单元:金银湖校区共有2184个寝室,抽60个寝室其中男生寝室20个,女生 寝室40个 三级单元:120个学生,每个寝室抽2名学生 第三步、抽样方法 以我校金银湖校区的在读大学生为总体,采用多阶段抽样方法抽取样本。(由于大四的很多不在校,所以只调查大一大二大三) 第一阶段,根据抽样总体数量为三百可知应抽取大一大二大三学生数均为40 第二阶段,将金银湖校区所有的寝室依次进行编号,根据寝室号赋予每个寝室一个与编号一样的代码;根据所有的寝室数除以样本量60,确定抽样间距;然后对代码进行随机起点的等距抽样,则被抽中的寝室为样本寝室。第三阶段,分别在每个样本寝室中,按随机二维数列表抽取2名学生(若寝室的人数不足,就从下一个寝室补充完整)。 四、实地调查 受时间、经济等因素的影响,我们无法调查学校的每一位学生,只是在金银湖校区进行了切实有效的抽样调查。在调查中要确切到达每一个被抽中的寝室,要保证调查的质量,获得真实有效的资料。 伺服电机的PLC控制方法 以我司KSDG系列伺服驱动器为例,介绍PLC控制伺服电机的方法。 伺服电机有三种控制模式:速度控制,位置控制,转矩控制{由伺服电机驱动器的Pr02参数与32(C-MODE)端子状态选择},本文简要介绍位置模式的控制方法 一、按照伺服电机驱动器说明书上的"位置控制模式控制信号接线图"连接导线3(PULS1), 4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻),SIGN2连接控制器(如PLC的输出端子)。当此端子接收信号变化时,伺服电机的运转方向改变。实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。7(com+)与外接24V直流电源的正极相连。29(SRV-0N),伺服使能信号,此端子与外接24V 直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器构成更完善的控制系统。 二、设置伺服电机驱动器的参数。 1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。 2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满足基本的要求. 3、Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。也就是选择3(PULS1),4(PULS2),5(SIGN1),6(SIGN2)这四个端子输入脉冲与方向信号。 4、Pr41,Pr42----简单地说就是控制伺服电机运转方向。Pr41设为0时,Pr42设为3,则5(SIGN1),6(SIGN2)导通时为正方向(CCW),反之为反方向(CW)。Pr41设为1时,Pr42设为3,则5(SIGN1),6(SIGN2)断开时为正方向(CCW),反之为反方向(CW)。(正、反方向是相对的,看您如何定义了,正确的说法应该为CCW,CW). 5、Pr46,Pr4A,Pr4B----电子齿轮比设定。此为重要参数,其作用就是控制电机的运转速度与控制器发送一个脉冲时电机的行走长度。其公式为:伺服电机每转一圈所需的脉冲数=编码器分辨率×Pr4B/(Pr46×2^Pr4A)伺服电机所配编码器如果为:2500p/r5线制增量式编码器,则编码器分辨率为10000p/r如您连接伺服电机轴的丝杆间距为20mm,您要做到控制器发送一个脉冲伺服电机行走长度为一个丝(0.01mm)。 计算得知:伺服电机转一圈需要2000个脉冲。(每转一圈所需脉冲确定了,脉冲频率与伺服电机的速度的关系也就确定了)三个参数可以设定为:Pr4A=0,Pr46=10000,Pr4B=2000,约分一下则为:Pr4A=0,Pr46=100,Pr4B=20。从上面的叙述可知:设定Pr46,Pr4A,Pr4B这三个参数是根据我们控制器所能发送的最大脉冲频率与工艺所要求的精度。在控制器的最大发送脉冲频率确定后,工艺精度要求越高,则伺服电机能达到的最大速度越低。做好上面的工作,编制好PLC程序,我们就可以控制伺服运转了。 伺服电机原理 一、交流伺服电动机 交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似。其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。 交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。目前应用较多的转子结构有两种形式:一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅 0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子.空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。 交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。 交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点: 1、起动转矩大 由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。 2、运行范围较广 3、无自转现象 正常运转的伺服电动机,只要失去控制电压,电机立即停止运转。当伺服电动机失去控制电压后,它处于单相运行状态,由于转子电阻大,定子中两个相反方向旋转的旋转磁场与转子作用所产生的两个转矩特性(T1-S1、T2-S2曲线)以及合成转矩特性(T-S曲线)。 交流伺服电动机的输出功率一般是0.1-100W。当电源频率为50Hz,电压有36V、110V、220、380V;当电源频率为400Hz,电压有20V、26V、36V、115V等多种。 交流伺服电动机运行平稳、噪音小。但控制特性是非线性,并且由于转子电阻大,损耗大,效率低,因此与同容量直流伺服电动机相比,体积大、重量重,所以只适用于0.5-100W的小功率控制系统。 二、交流伺服电动机原理 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈电力用户用电信息采集系统设计方案3
抽样方案设计
FOC控制基于电阻的电流采样实施方案比较
伺服电机工作原理及和步进电机的区别
抽样方案设计模版
伺服电机的三种控制方式
FOC控制基于电阻的电流采样方案比较
用电信息采集系统采集成功率提升(智能召测)方案
空气采样探测器设计方案
PLC控制伺服电机的方法
电力用户用电信息采集系统方案介绍
抽样设计方案
伺服电机的PLC控制
伺服电机控制原理