开滦矿顺槽皮带勺杆电机软起动控制及保护系统
0 引言
煤炭工业是国民经济的重要基础工业,因此,煤炭生产是关系到整个国民生产的大事,而在煤炭生产中安全是煤炭生产的头等大事,装备矿井安全监测装置是保障矿井安全生产的重要手段。高效是一切生产活动所追求的重要目标。及时准确无误地监测到井下环境和设备工况,确保安全,实现自动化管理及控制是现代化矿井的发展方向。
基于以上要求,采用计算机进行监测和控制日益普及,因此出现了可编程控制器(Programmable Logic Controller,PLC)以存储执行逻辑运算,顺序控制、定时、记数和运算等操作的指令,并通过数字输入和输出操作来控制各种机械或生产过程,用户编制的控制程序表达了生产过程的工艺要求,并事先存入PLC的用户存储器,运行时按存储程序的内容逐条执行,以完成工艺要求的操作。国产本质安全型可编程控制器,一般情况下,操纵台是用可编程序控制器装在防爆壳中完成的,再通过控制箱与外围设备连接,即形成散射状,多条线路把执行器、传感器与控制箱连接在一起,安装困难,故障率高。无语音通讯功能,无独立的安全回路。拉线开关必须另设拉绳。对于多条皮带机的控制和保护,一条皮带须设一台分站,分站与主站连接并通讯,分站与分站之间通讯需通过主站,通讯速度慢,实现起来困难。
基于以上原因而采用了德国生产的“PROMOS”系统“PROMOS”系统即“PROGAMABLE MUDUL AUTOMATIC SYSTEM”(可编程序模块化控制系统)的简称。它是专门为煤矿井下而开发的能够用于完成各种控制任务的一种通用监控系统该系统具有输入、输出、语音通讯、安全保障、自诊断、和其他系统通讯等功能。全系统按本质安全性能设计,全系统适合煤矿井下使用,同时,系统具有丰富的非本安接口,可以和非防爆产品配套使用,现在该系统已广泛应用在煤矿井下运输系统的控制及保护。该系统是世界上唯一的本安型串行可编程序控制系统,采用模块化的设计和快插技术,集监测、通信、控制、管理和安全保障于一体。可实现矿井下皮带运输机,工作面运输机、破碎机、转载机的集中控制、通讯等等,以及全矿井集中控制。
基于以上原因用PROMOS监控系统来实现皮带机械控制和综合保护是其中较为完善的先进系统,有效的避免了由于长皮带输送机的负荷大、胶带长,而产生的堆煤、纵撕、跑偏、速度过快、产生烟雾等危险及破坏皮带等情况。对整个皮带机的启动性能、张紧控制、沿线保护等要求通过实习和实践的探索,现在采用的PROMOS电控系统和勺杆电机软启动相配合能实现对这些长胶带输送机的理想控制]1[。
1 总体设计
本设计主要是关于皮带监控与保护的设计,要考虑到安全和快速等问题,主要用到的设备如下:皮带头部安装两台主电机以及堆煤传感器,速度传感器,烟雾传感器,两个跑偏传感器,每100米一个急停,每200米一个电话,每400米处一台智能电话KTK1I接两个跑偏传感器,在皮带尾部接一纵撕传感器。实现对皮带的各种保护及故障监测。
1.1 AST线和LINIE线
在PROMOS系统中,采用的是LINIE线和AST线通过智能现场设备,把控制模块和I/O模块置入现场设备,加上现场设备具有通信能力,现场的测量边变送仪表可以与阀门,接触器等执行机构直接传输信号,因此控制系统功能能够不依赖控制室的计算机或控制仪表,直接在现场完成,实现彻底的分散控制。
1.2 PROMOS系统配置设计原则
在PROMOS的系统配置中,应严格遵循如下原则:
1)每个系统的AST线都从控制器开始。
2)每条AST线都以一台KFD1型系列线路终端结束。
3)在AST线上,每100m必须有一台PROMOS设备。
4)工作时终端电压不得小于8V。
5)AST线上的设备排列顺序是可以调换的,密度不受限制。
6)AST线上的智能I/O部件,用于和传感器和执行装置相连,导线的最大长90m。
1.3 供电
1)KJF21控制器采用KDW10型稳压电源供电。
2)KJJ10,KJJ10A,KJA4,KJA4A采用AC 127V供电。
1.4 负载电流
PROMOS系统在正常工作时,控制器耗电流200mA,智能型部件耗流15mA,扬声器耗电流13.5mA,急停开关和手动开关耗电流2mA,终端耗电流20mA,从负载能力考虑,可将所有设备的耗流相加,只要不大于1.0A即可。
1.5 设计方案及选择
在实际工作中,设备有可能不均匀分布,但也不可能出现完全将设备集中到电缆的末端,相反,就皮带系统而言,设备多集中在皮带的头部,这样更有利于电源的传输。基于
以上的分析,我设计了配置方案。每种方案的配置原则,都应保证终端KFD1的电压大于8V,这样才能使设备正常工作。方案如下:
1)方案一:此配置电缆长度3000米,是针对信号较少而通讯距离较长的场所而配的,如皮带运输系统自动化控制。
2)方案二:此配置针对信号范围广而通讯距离长而配置的。具体为二台控制器串联使用。
3)方案三:此配置是针对大规模集中控制而配置的。具体为最多32台控制器串联使用,每台控制器的具体配置可选用方案一或方案二的任意一种。
4)方案四:此配置是在方案二的基础上,将LINIE线通过耦合器延伸到地面,供全矿井监控系统使用。
本次设计采用方案一:
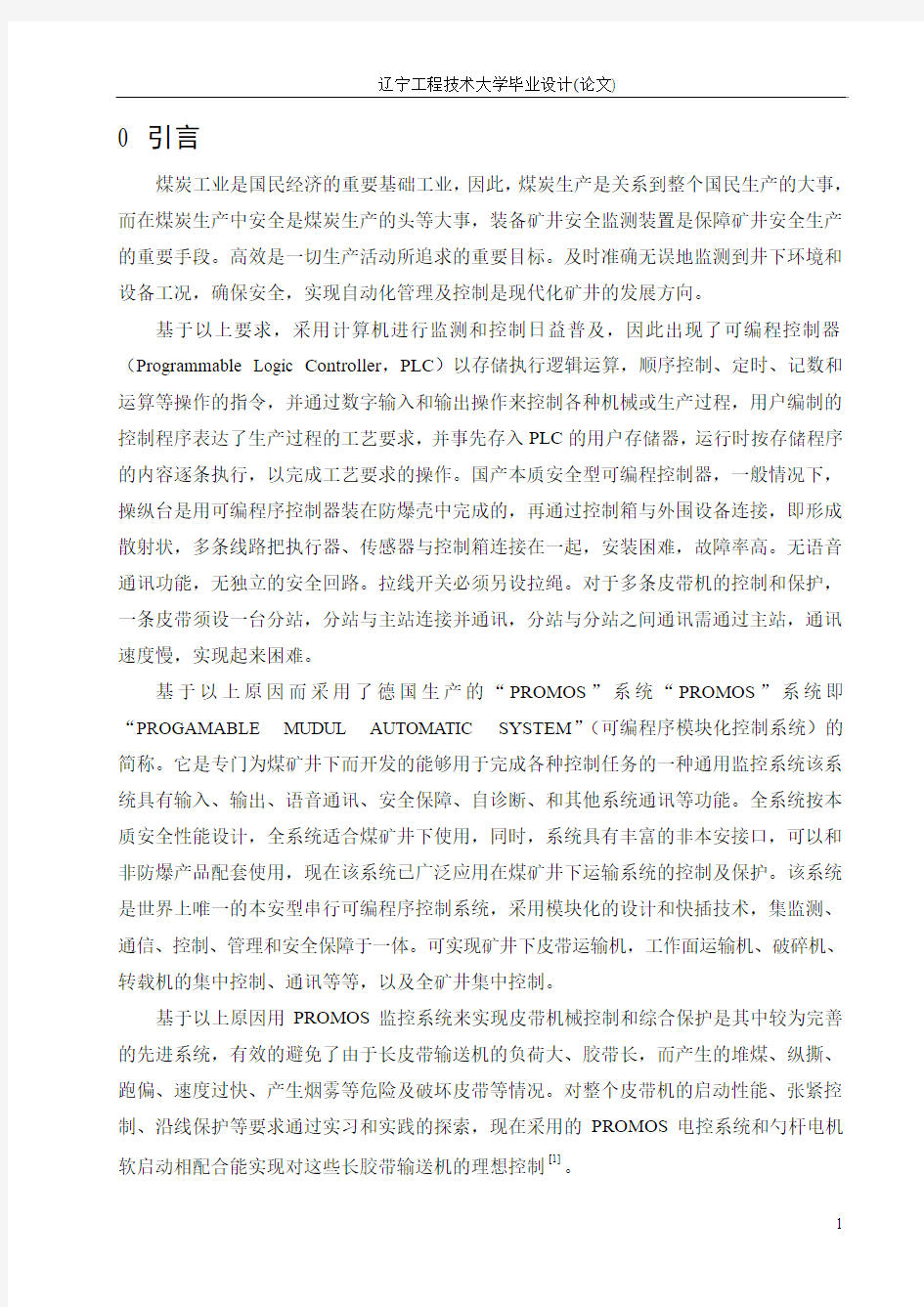
本次设计的配置图安排如下:在皮带头部安装一台KJF21型控制器,一台KZC5型液力调速接口,一台KCC1D型智能I/O接口箱,两台主电机以及堆煤传感器,速度传感器,烟雾传感器,两个跑偏传感器,每100米一个急停,每200米一个电话,每400米处一台智能电话KTK1I接两个跑偏传感器,在皮带尾部接一纵撕传感器。实现对皮带的各种保护及故障监测。以下是对各部分硬件的详细叙述。
图1-1 PROMOS自动化系统配置图
Fig.1-1 PROMOS Automation System Configure Plan
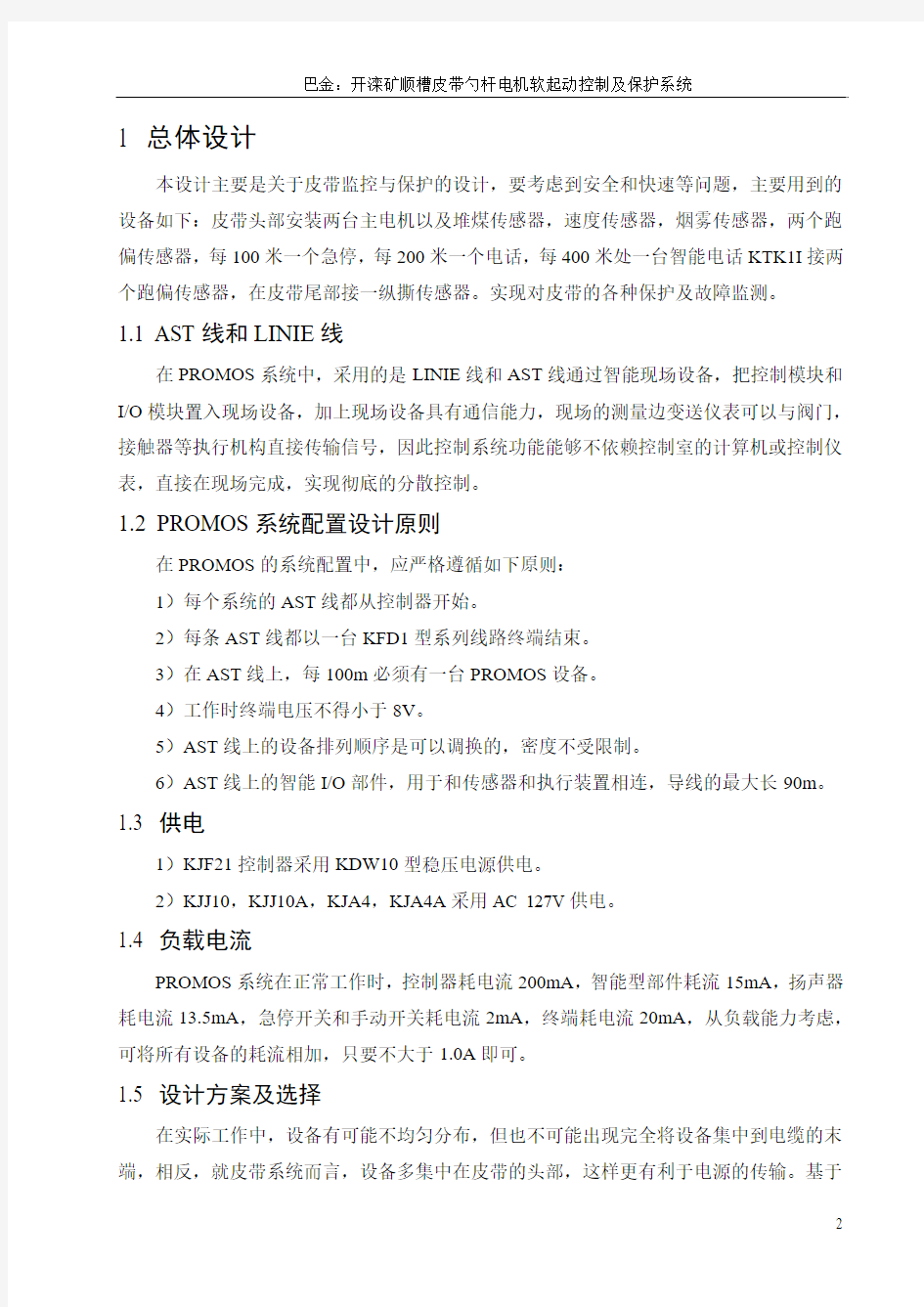
Fig.1-2 system Procedures Flow chart
2 PROMOS系统简介
2.1 概述
KJ50型PROMOS监控系统(以下简称PROMOS系统)是一种适用于各种控制任务的通用型、高性能、高可靠性的工业自动化系统。该系统有较强的适用性和可扩展性,可以组成不同的控制规模,小到一条皮带,大到整个采区乃至全矿井的生产过程控制。方便灵活,其逻辑控制方式可以通过软件编程来实现,使复杂的控制逻辑变得简单易行。系统中的产品采用简便快捷的直插式插接件相连,使系统在恶劣的环境中也能快速准确的安装和更换。系统中有独立的语音通讯线,使系统在可以延伸的地方就可以进行语音通讯。系统中有特定的安全保障回路,与控制回路相连使用,可使系统控制安全可靠。
2.2 系统结构
2.2.1 PROMOS系统简图
图2-1 PROMOS系统简图
Fig.2-1 PROMOS System sketch
2.2.2 系统组成
本次设计的硬件主要由以下部件组成:控制器、液力调速接口、智能I/O接口箱、急停、电话(带急停)、堆煤传感器、速度传感器、烟雾传感器、跑偏传感器、张力传感器、
纵撕传感器、温度传感器。
2.3 工作原理
PROMOS监控系统的控制器通过AST线来发送数据、命令、语音等信号,再通过AST 线来接收沿线智能元件的反馈信号再传给控制器。
2.3.1 编程及程序传送
PROMOS系统要完成监控功能,首先应根据用户的具体要求进行编程。在普通PC机的Windows环境下,应用PROMOS公司自己的编程软件PROMOS-CAD,可以绘制出配置图和逻辑关系图,然后经过PC机的编译汇编,生成控制器可以识别的机器码,通过通讯口传给控制器,也可以通过Linie总线将控制程序代码传给现场的其他控制器。控制器把程序代码存入E2PROM中,就可在每次上电后执行程序。
2.3.2 运行
上电后,控制器首先对非智能部件进行查询。以确定其数量、状态。控制器检测出急停开关及安全回路的具体状态,对非智能部件检查完成后,开始对智能部件进行初始化。根据用户程序对智能部件进行设置,以确定每一输入口是模拟量、开关量,还是频率量,每一输出口是开关量或频率量。另外,智能部件的配接顺序必须与程序设定相同。
控制器同智能部件之间的通讯为令牌式]2[。控制器连续不断地向AST线发送令牌,当智能部件接收的传感器信息发生改变,需要向控制器汇报时,捕捉令牌,将自己的信息以报文的形式发送给控制器,这种方法被称作汇报式。通过这种方法,智能部件只有在传感器状态发生改变时才和控制器进行通讯,通过传感器采集数据,智能部件进行预处理,然后传送给控制器,由控制器进行处理,这样即节省了时间,又保证了反应速度。
2.4 技术特性
2.4.1 电源
电压输入:AC 127V波动范围-25%~+10%电压输出:DC 12V二路,DC5V一路。其中12V 用于供给控制器本身和AST 设备,另一路12V供给Linie卡,5V 供给控制器本身的CPU部分。
2.4.2 控制器程序存贮器容量
E2PROM 256K 可扩展512
2.4.3 监测
系统可对现场各种环境参数及生产设备工作状态进行采集监测。如:甲烷、一氧化碳、烟雾、温度、皮带速度、打滑、跑偏、断带、电压、电流、频率等]3[。
2.4.4 安全保障
PROMOS系统是完善的语音通讯系统,可实现全矿井或部分区域的语音通讯。
PROMOS系统具有独立的安全保障回路,在任何情况和任何地点,通过按下急停按钮或拉线式急停开关,都能使被控设备立即停车,以保证人身和设备的安全。
2.5 使用和操作
PROMOS系统是一个多功能的通用系统,每一套系统都是根据用户的实际需要进行设计,所以每套系统的使用方法和操作方法都有所不同。
2.5.1 急停操作
当工作人员发现有故障发生时,可以按下最近一个急停按钮。
2.5.2 语音通讯
系统中的任何一台电话都可以收话,按下扬声器的讲话按钮,可以送话。除本台电话外其它任何一部电话都能听到讲话声音。
2.6 PROMOS系统的特点
1)系统的核心是控制器,最多256台
2)系统供电:AC127V,50Hz,+20%,-30%
3)最大传输距离:3.2km
4)控制器与控制器之间通讯速度最大:38.4k bit/s
5)控制器与传感器接口的通讯速度:2.4k bit/s
2.6.1 模块组合
PROMOS系统具有较强的适应性和可扩展性,可以组成不同的控制规模,来完成监测、控制、通讯、安全、生产管理功能。
2.6.2 可编程
用逻辑关系图进行软件编程,简便、直观、容易实现各种复杂的控制功能。
2.6.3 独立完善的语音通讯功能
通过具体设计,可以实现全矿井或部分区域的语音通讯,且可与普通电话系统连网2.6.4 独立的安全保障回路
在任何情况下按动急停开关或拉动PROMOS系统电缆,都能保证设备立即停车,保证人员及设备的安全,使系统具有高可靠性,高安全性]4[。
2.6.5 集中管理
PROMOS系统能对现场的各种信息进行采集、整理,并进行存储,通过分析、判断,做出综合处理,且可根据需要显示打印各种系统报表,在井上调度室进行实际工作状态的仿真模拟,参数设置,故障诊断等,实现全矿井的集中管理。
2.6.6 独特的优秀技术
系统的联结采用简便快捷的环行柱状直插式插接件,适合于在煤矿井下等恶劣的环境中使用。灵活的控制方式可由用户定义,可集中程序控制和就地远程控制。具有完善的监测功能,可对现场安全环境参数及生产设备的运行状态进行采集监测和保护。系统运行和故障状态可集中定性定位显示在液晶显示器上,故障监测直观。传输速度快,控制器和外围设备信号传输速率为2.4K波特,保证信号采集和处理快捷。
3 系统硬件设计
本次设计的配置安排如下:在皮带头部安装一台KJF21型控制器,一台KZC5型液力
调速接口,一台KCC1D 型智能I/O 接口箱,两台主电机以及堆煤传感器,速度传感器,烟雾传感器,两个跑偏传感器,每100米一个急停,每200米一个电话,每400米处一台智能电话KTK1I 接两个跑偏传感器,在皮带尾部接一纵撕传感器。实现对皮带的各种保护及故障监测。以下是对各部分硬件的详细叙述。
3.1 KJF21A 型控制器
3.1.1 概述
KJF21A 型控制器是KJ50型PROMOS 监控系统中的核心产品,是一种多功能可编程
通用型控制器。
3.1.2 控制器的主要功能
程序存贮和处理;集中控制台;语音通讯、预警发生、故障报警;急停和闭锁;信息
显示;系统网络终端或服务器。
3.1.3 型号及其含义
KJ :矿用监测、控制系统或设备,F :分站设备,21:登记序号,A :变形序号。
3.1.4 组成结构
1)外部结构
图3-1 控制器外部结构图
Fig.3-1 Structure chart External the controller
(1)扬声器
(2)键盘
(3)显示器
(4)磁感应开关指示灯 (5)外围设备错误指示灯 (6)安全回路状态指示灯
(7)维修状态指示灯(8)单机状态指示灯(9)被控设备运行指示灯(10)预警按钮
(11)麦克风
(12)讲话按钮
(13)急停开关
(14)前门锁孔
(15)3#单台启停旋钮(16)备用单台启停旋钮(17)1#单台启停旋钮(18)2#单台启停旋钮(19)Linie右
(20)AST口
(21)Linie左
(22)集中控制开关(23)控制方式开关(24)磁感应开关
2)内部结构
X1AST线NF语音通信功能X2NF语音内部通信插座
X3前面板通信总线插座
X4PS2305S电源插座
X6PS2300电源AMP插座X7AST1和LINIE外部电源插座X12AST1插座
S1AST和SKR连接电源开关
H1-H10
发光指示
图3-2 控制器内部结构图
Fig.3-2 Structure chart within the controlle
表3-1 电源连接插座接线表
Tab.3-1 The power joins the socket wiring form
说明X7端子
+5V 1
GND 2
+12V (AST1) 4
GND (AST1) 5
+12V (LINIE)7
GND (LINIE)8
+12V
GND
表3-2 底板AST插座接线表
Tab.3-2 The base plate AST socket wires forms
管脚说明
1 12V
2 GND
3 数据线
4 空
5 SKR+安全回路
6 SKR-安全回路
7 NF语音线
8 NF语音线
3)主要部件
控制单元PE2105由框架PE2175A和底板,总线卡以及框架主板组成,框架上安装了下列卡:CMA卡、存贮卡、Linie卡(总线卡)、一个AST插座、二个Linie插座、NF扩音电话模块、底板上有LED显示、前面板上带有麦克风、预警按钮。
3.1.5 工作原理
1)设备控制:
1个工作方式开关:三个操作位置;5个起/停车开关:三个操作位置;1个磁感应开关:磁式开关;16键:为基础键,可自由设置;4个发光二极管:1个黄、2个绿、3个红
发光二极管和开关的功能可以由用户在编程中自由定义。
2)信息显示
显示器组件是由液晶显示器和16个按键组成,可以通过显示器来查询设备状态。终端键有以下两种功能:
基础键:在显示中要显示的内容,由用户定义15个键被定义为控制功能。
“i”键:在实际工作中,使用“i”键可以成功地进入资料显示功能,利用这个键可以显示整个系统中支配的实际信息。
3.1.6 PP2120 CMA卡
CMA卡是控制器的核心部件,是系统程序和用户程序的存贮器和处理器,主CPU为68360,16位高速芯片。存贮器容量:256K。其作用为:
1)系统程序和用户程序的存储和处理;
2)产生提供SKR安全回路交流电压;
3)和控制器的前面板进行数据交换;
4)带有串行口,用于和外系统交流数据;
5)和AST线相连,是AST设备和CPU之间的转换接口;
6)产生预警信号,和AST线及LINIE线的NF线相连。
3.1.7 前面板的复位键的使用
按复位键,主机产生一个中断,主机保护数据,然后对整个控制器产生一个复位。3.2 KDW10型矿用直流稳压电源
3.2.1 概述
KDW10型矿用直流稳压电源(以下简称电源)是PROMOS系统中的关键产品,为PROMOS系统提供本安电源,适用于煤矿井下的有甲烷和煤尘爆炸性危险的环境中,其防爆型式为:矿用隔爆兼本安型。爆标志为Exdib I(150℃)。型号及其含义:KD矿用电源、电控设备及组件,W:稳压电源,10:登记序号。
3.2.2 结构特征
电源是由厚钢板焊接而成,壳体的最小厚度均不小于3mm,其中的零、部件有防锈防蚀处理,紧固件有防松动的措施,内外均设有接地,并有标志牌“”,采用浇封式结构固定在支架上。
3.2.3 工作原理
本电源为开关型稳压电源,127V输入电压经变压器变为24V,然后将其输入到整流板中,经整流滤波后成为直流24V,经两级电压保护及电流保护后提供出本安的直流12V和5V,5V用于供给控制器的本机使用,12V经控制器供给PROMOS系统中的AST沿线]5[。具体接线如图3-3所示:
图3-3 直流稳压电源电路图
Fig.3-3 Steady voltage plug circuit diagram of direct current
3.2.4 技术特征
1)输入回路:输入电压:交流127V;
2)输出回路(本安、直流、三路)
5V(一路)12V(二路)
工作电压5V 12V
工作电流 1.7A 1A
输入电压偏离值≤5% ≤5%
负载效应≤2% ≤2%
源效应≤2% ≤2%
周期与随机偏稳≤100mV ≤100mV
最高开路电压≤5.8V ≤12.3
过流保护值2A 1.3A
短路电流200mA 100mA
源电压75%-110%
3.3 KCC1D型智能I/O接口
3.3.1 概述
KCC1型系列智能I/O部件,是KJ50型PROMOS监控系统中的主要产品,是PROMOS 系统输入输出信息的转接设备,共有四个输入输出端口,每一端可连接一路传感器输入和一路执行元件的输出,不能单独使用,只能与PROMOS系统配套使用,按与外部设备相联的不同要求有五种方式如下:
KCC1型系列智能I/O部件,采用插头座连接。
KCC1A型智能I/O部件,采用接线端子连接。
KCC1B型智能I/O部件是在两个输出口中附加了SKR安全信号的控制部件。
KCC1C型智能I/O部件是在四个输出口中都加SKR安全输出信号的控制部件。SKR 安全输出信号,从硬件方面保证紧急停车的作用更加安全有效。
KCC1D型是以多块智能I/0部件为基础的灵活组合。
本产品适用于煤矿井下的有甲烷和煤尘爆炸性危险的环境中,其防爆型式为:矿用本质安全型。防爆标志为:ExibI(150℃)。.型号及其含义:KC:矿用信息传输装置及组件,C:模、开I/O混合组件,1:登记序号, :变型序号A-D。
其中变型序号:A为引线端子式;B为两路接点输出和两路安耦合接点输出;
C为四路接点输出和四路安耦合接点输出;D为多块智能I/O部件为基础的各种组合。
3.3.2 结构特征
KCC1型系列智能I/O部件的外壳是由钢板焊接而成的,壳体的最小厚度均不小于3mm,其中的零、部件有防锈防蚀处理,紧固件有防松动的措施,其中KCC1型系列的接线方式为插头座,KCC1A-D型带有接线腔,腔内设有端子排,采用电缆引入装置,外壳防护等级IP54。
3.3.3 工作原理
KCC1型系列智能I/O部件是PROMOS系统与外部进行信息交流的主要产品。它接收传感器采集来的信息,进行预处理,将此信号通过AST的数据线传输给控制器,由控制器进行综合处理,再发出相应的控制指令,以令牌的方式传输给智能I/O部件,由它做出相应的反映或驱动对应的执行元件]6[。其工作原理简图3-4。
图3-4 智能接口箱原理图
Fig.3-4 Case principle picture of the intelligence interface
表3-3 智能部件框图接线端子表
Tab.3-3 Smart Parts diagram Connection Table forms
智能部件接口作用作用作用作用
a.KCC1型系列智能I/O部件第一口1、2:输出3:空4:地5:输入
b.KCC1型系列智能I/O部件第二口6、7:输出8:空9:地10:输入
c.KCC1型系列智能I/O部件第三口11、12:输出13:空14:地15:输入
d.KCC1型系列智能I/O部件第四口16、17:输出18:空19:地20:输入
3.3.4 技术特征
1)工作电压:8-12V
2)工作电流:KCC1和KCC1A :15mA;KCC1B:100mA;KCC1C:152mA。
3)每一块V AL板有4个I/O口,每个I/O口有一组输入和一组输出。
4)输入有三种信息(由软件编程定义为其中一种)
(1)开关量输入:电压<1.5V DC 数字电平1;电压>2V DC 数字电平0。
(2)模拟量输入:电压:0~10V DC
(3)频率量输入(插口1~3)频率范围:1~15Hz,5~15Hz,50~150Hz,1~600Hz 5)输出有三种
无源继电器接点输出(KCC1B两对接点,KCC1C四对接点。必须接本安控制电路)开关量输出:高低电位
频率量:1~15Hz,5~15Hz,50~150Hz,1~600Hz
6)通讯速率:2.4k bit/s
7)采集信号时间<1s
8)输出信号执行时间<1s
3.4 KGP3型系列急停开关
3.4.1 概述
KPG3型系列急停开关是PROMOS系统中的主要产品,它在紧急情况下可以对设备(如电机)进行停机和闭锁,保证人身和设备安全。
KPG3型系列急停开关有四种型号:KPG3型急停开关;KPG3A型带预警急停开关;KPG3B型过站开关;KPG3C型拉线急停开关。
3.4.2 结构特征
KPG3型系列急停开关均为铸铁结构,外壳厚度不小于3mm,其中的零部件有防锈防蚀处理,紧固件有防松动的措施。
3.4.3 工作原理
系列急停开关是由二个常闭接点,一个常开接点,一个发光二级管和一个MEL电路板组成。两个常闭接点接通AST线路中的SKR安全回路,一个常开接点用于急停开关动作后触发MEL电路板,发光二极管用于指示急停开关被动作,如图3-5所示:
图3-5 急停开关电路图
Fig.3-5 Stop the switch circuit diagram urgently
3.4.4 使用
该系列急停开关只能与PROMOS系统配合使用,使用时将需要安装急停开关的地方放置急停开关,按安装尺寸固定急停开关,用AST电缆将其与系统中的其它设备相联,当有紧急事故发生时,按下急停按钮或拉动AST电缆(对KPG3C)就可实现紧急停机和闭锁,同时按钮中的芯轴中带有孔位,可以用锁锁定,防止误操作,保证人机安全。
3.5 KTK1型扩音电话
3.5.1 概述
KTK1型系列扩音电话是PROMOS系统中的一系列产品,它有各种方式的组合,主要由语音通讯、急停开关和智能I/O部件三部分组成,可以用于语音通讯,又可以对设备(如电机)进行停机和闭锁,保证人身和设备安全。还可以对外部设备进行控制,数据采集及现场管理。当按下讲话按钮后,可以用麦克风讲话,此设备所在的AST线上的所有扬声器发出尖锐的叫声(本身除外),一直到放开预警按钮。
该系列扩音电话适用于煤矿井下的有甲烷和煤尘爆炸性危险的环境中,其防爆型式为:矿用本质安全型。防爆标志为ExibI(150℃)。
型号及其含义:KT:矿用通信系统或设备;K:扩音电话;1:登记序号;
:变型序号A~K如下:
A为带I/O口的扩音电话
B为带拉线开关的扩音电话
C为带I/O口和急停法兰的扩音电D为带急停开关的扩音电话
E为带I/O口和急停法兰的扩音电话F为双扬声器扩音电话
G为带I/O口的双扬声器扩音电话H为带拉线开关的双扬声器扩音电话
I为带急停法兰和I/O口的双扬声器扩音电话
J为带急停开关的双扬声器扩音电话
K为带急停法兰和I/O口的双扬声器扩音电话
3.5.2 结构特征
KTK1型系列扩音电话外壳由钢板焊接而成,拉线开关部分为铸铁结构,外壳厚度不小于3mm,其中的零部件有防锈防蚀处理,紧固件有防松动的措施。
3.5.3 工作原理
电话包括送受话部分和预警发送部分,电话中的语音接收部分一直在监测着语音线(NF线),当NF线上的信息小于180mV时,电源给扩音电话的蓄电池充电,充电电流为13.5mA,当NF线上的信息大于或等于180mV时,充电回路被切断,语音接收部分开始
工作,将语音信号进行放大,由扬声器发送出来,若信号小于180mV,电话将延时切断,NF模块的原理图如图3-6所示。
.
图3-6 扩音电话原理图
Fig.3-6 Amplify telephone principle picture
3.5.4 技术特征
1)工作电压8~12V DC
2)工作电流KTK1I:40.5mA
3)电话的话音声强(1000Hz时)为105dB(1m处)。
4)话音失真度不大于10%。
5)预警信号发生频率为1.5kHz。
6)带急停开关和急停法兰的电话,其中的急停的动作方式为按钮式。
3.6 KFD1型线路终端
3.6.1 概述
KFD1型系列线路终端是PROMOS系统中的关键产品,它用于PROMOS系统AST线路终端,它是PROMOS系统中AST线的最后一台设备,是必不可少的,通过它可以对系统的电源、安全回路、数据线的高低电平,NF线的语音信号起到监测作用]7[。
KFD1型系列线路终端有两种产品:KFD1型为单路终端,KFD1A型双路终端。
KFD1A型双路终端用于连接来自不同的控制器的两条AST线,对每一条AST线来讲,它们所起的作用与单路终端相同,除此之外,它还将两条AST线上的SKR信号互相连锁、耦合,NF语音信号也相互耦合。系列线路终端防爆型式为:矿用本质安全型。防爆标志为:ExibI(150℃)。
型号及其含义:KF:矿用通信、自动化附属设备;D:线路终端设备;1:登记序号; :变型序号A (A为双路终端)。
3.6.2 结构特征
KFD1型单路终端外壳采用黄铜制成,KFD1A型双路终端外壳采用钢板焊接而成,壳体的厚度均不小于3mm,芯体部件均采用浇封结构,其中的零部件有防锈防蚀处理,紧固件有防松动的措施。
3.6.3 工作原理
KFD1线路终端是由NT5、ARK和主板三部分组成的,ARK模块是用于和控制器间进行通讯的主CPU,并完成对电源电压的监测,在SKR+和+12V之间,SKR-和GND 之间分别通过一个电阻和一个电感相连,为对AST线的安全回路进行监测创造条件,如图3-7所示:
图3-7 线路终端原理图
Fig.3-7 Terminal principle picture of the circuit
3.6.4 技术特征
1)工作电压:8~12V;
2)工作电流:KFD1为20mA;KFD1A为40mA。
3.7 堆煤传感器
3.7.1 概述
KGU3B型堆煤开关是KJ50型PROMOS监控系统中专用的堆煤开关,它是PROMOS 系统的配套产品,不能单独使用。它安装在皮带搭接处,皮带运输机发生堆煤时,堆煤开关动作,PROMOS系统发出指令,停止皮带运输机。防爆类别:矿用本质安全型ExibI (150℃)。型号及其意义:KG:矿用传感器及敏感元件;U:物位;3:登记序号; :变型序号B。
3.7.2 结构特征
KGU3B型堆煤开关采用吊挂式。主要由圆筒状外壳、电气组件板、下端盖(电极)三部分组成,电源和输出线由固定在外壳上的MKⅡ-7型插座引出。如图3-8所示:
图3-8 结构图
Fig.3-8 Structure chart
3.7.3 工作原理
图3-9 工作原理图
Fig.3-9 Principle of work chart
堆煤开关其核心是一个施密特触发器,1线为接地线,2线为电极,7线为电源正线,5线电源负线,4和5为输出线。当1和2线之间电阻大于临界值时,4和5线之间电阻值约52ΚΩ,当1和2线之间电阻小于临界值时,4和5线之间电阻值约4.7ΚΩ,系统对其输出电阻的变化进行测量,从而确定是否堆煤。
堆煤开关的电极端通过金属杆或链吊挂在检测物料点的上方,同时外壳经接地导线接地(接到检测物料的下方)。当皮带运输机发生堆煤或满仓时,外壳和电极构成回路,堆
力矩电机控制系统设计
力矩电机控制系统 一、设计目的及任务 力矩电机分直流力矩电机和交流力矩电机,其工作原理和普通直流和交流电 机的工作原理是一样的。但是不同的是直流力矩电机的电枢绕组的电阻比普通直流电机的电枢绕组的电阻大,同样交流力矩电机转子的电阻比普通交流电机的转子电阻大。对于力矩电机我们注重它的技术参数主要是额定堵转电压,额定堵转电流和额定堵转电流下的堵转时间。 力矩电机的特点是具有软的机械特性,可以堵转。当负载转矩增大时能自动 降低转速,同时加大输出转矩。当负载转矩为一定值时改变电机端电压便可调速,但转速的调整率不好。因而在电机轴上加一测速装置,配上控制器,利用测速装置输出的电压和控制器给定的电压相比,来自动调节电机的端电压,使电机稳定。 设计任务就是要设计一个控制系统来控制力矩电机,使其产生满足要求的力矩。 1、能产生所要求的力矩,可用于一些地面模拟设备上,用来模拟设备运行时的干扰力矩; 2、可用于控制系统设计课程实验设备或是控制算法的验证。 二、设计要求 本系统为力矩电机的控制系统,设计要求如下: 1、可以产生三种固定的力矩波形; 2、可以根据要求任意设定力矩波形,这样可以大大增加系统的灵活性; 3、可以实现单片机和PC的相互传输; 4、控制精度高,响应快; 5、力求简单,实用。 三、设计方案 系统的装置由光电码盘,稀土永磁直流力矩电机和飞轮组成。 在控制器的设计上,为了做到简单、实用,选择了常用的PID控制;为了提高系统的控制精度,从软件上对系统进行误差补偿。 1、系统工作原理 通过控制向力矩电机施加的电流,向飞轮施加力矩,使飞轮加速后减速旋转,反作用力矩通过模拟器机械装置的底座同时施加到连接的转台上,达到向状态施加力矩的作用,全部过程再闭环控制下进行。系统总体框图如图1所示: 图1.系统总体框图 2、控制系统描述 电机转动的角度经光电码盘检测转化为脉冲输出,对脉冲信号进行计算就得 到角度转动的累计值,控制计算机将指令与光电码盘输出的角度信号相比较,得
异步电机矢量控制仿真
2.5异步电机基于磁场定向的矢量控制系统仿真 学号:S16085207020 姓名:李端凯 图1 矢量控制仿真模型整体结构图 图2 id*求解模块 图3 iq*求解模块
图4 DQ到ABC坐标转换模块 图5 求解转子磁链角模块 图6-1 ABC到DQ坐标转换模块 在这一部分转换中包含两种变换——3/2变换和旋转变换。在交流电动机中三相对称绕组通以三相对称电流可以在电动机气隙中产生空间旋转的磁场,在功率不变的条件下,按磁动势相等的原则,三相对称绕组产生的空间旋转磁场可以用两相对称绕组来等效,三相静止坐标系和两相静止坐标系的变换则建立了磁动势不变情况下,三相绕组和两相绕组电压、电流和磁动势之间的关系。图1绘出了ABC 和αβ两个坐标系中的磁动势矢量,按照磁动势相等的等效原则,三相合成磁动势与两相合成磁动势相等,故两套绕组磁动势在α、β轴上的投影都应相等,于是得:
()233332333cos60cos6011 ()22 sin 60sin 602a b c a b c b c b c N i N i N i N i N i i i N i N i N i N i i αβ=--=--=-=+ 写成矩阵形式: 图6-2 ABC 和αβ两个坐标系中的磁动势矢量 111220a b c i i i i i αβ???-- ?????=??????????? 再就是旋转变换,两相静止坐标系和两相旋转坐标系的变换(简称2s/2r 变换),两相静止绕组,通以两相平衡交流电流,产生旋转磁动势。如果令两相绕组转起来,且旋转角速度等于合成磁动势的旋转角速度,则两相绕组通以直流电流就产生空间旋转磁动势。从两相静止坐标系到两相旋转坐标系的变换,称为两相旋转-两相静止变换,简称2s/2r 变换。其变换关系为: cos sin sin cos d q i i i i αβφφφφ-??????=???????????? 由此整理得到: 111cos sin 22sin cos 0a d b q c i i i i i φφφφ????-- ????????=?????-?????????? 同理可得:DQ 到ABC 坐标转换则是其逆变换。 图7 求解磁链模块
开关磁阻电机的原理及其控制系统
开关磁阻电机的原理及其控制系统 开关磁阻电机80年代初随着电力电子、微电脑和控制理论的迅速发展而发展起来的一种新型调速驱动系统。具有结构简单、运行可靠、成本低、效率高等突出优点,目前已成为交流电机调速系统、直流电机调速系统、无刷直流电机调速系统的强有力的竞争者。 一、开关磁阻电机的工作原理 开关磁阻电机的工作原理遵循磁磁阻最小原理,即磁通总是要沿着磁阻最小路径闭合。因此,它的结构原则是转子旋转时磁路的磁阻要有尽可能大的变化。所以开关磁阻电动机采用凸极定子和凸极转子的双凸极结构,并且定转子极数不同。 开关磁阻电机的定子和转子都是凸极式齿槽结构。定、转子铁芯均由硅钢片冲成一定形状的齿槽,然后叠压而成,其定、转子冲片的结构如图1所示。
图1:开关磁阻电机定、转子结构图 图1所示为12/8极三相开关磁阻电动机,S1. S2是电子开关,VD1, VD2 是二极管,是直流电源。 电机定子和转子呈凸极形状,极数互不相等,转子由叠片构成,定子绕组可根据需要采用串联、并联或串并联结合的形式在相应的极上得到径向磁场,转子带有位置检测器以提供转子位置信号,使定子绕组按一定的顺序通断,保持电机的连续运行。电机磁阻随着转子磁极与定子磁极的中心线对准或错开而变化,因为电感与磁阻成反比,当转子磁极在定子磁极中心线位置时,相绕组电感最大,当转子极间中心线对准定子磁极中心线时,相绕组电感最小。 当定子A相磁极轴线OA与转子磁极轴线O1不重合时,开关S1, S2合上,A 相绕组通电,电动机内建立起以OA为轴线的径向磁场,磁通通过定子扼、定子极、气隙、转子极、转子扼等处闭合。通过气隙的磁力线是弯曲的,此时磁路的
两相步进电机控制系统设计
综合课程设计 题目两相步进电机 学院计信学院 专业10自动化 班级2班 学生姓名 指导教师文远熔 2012 年12 月28 日
两相步进电机课程设计报告 步进电机是一种进行精确步进运动的机电执行元件,它广泛应用于工业机械的数字控制,为使系统的可靠性、通用性、可维护性以及性价比最优,根据控制系统功能要求及步进电机应用环境,确定了设计系统硬件和软件的功能划分,从而实现了基于8051单片机的四相步进电机的开环控制系统。控制系统通过单片机存储器、I/O 接口、中断、键盘、LED 显示器的扩展、步进电机的环形分频器、驱动及保护电路、人机接口电路、中断系统及复位电路、单电压驱动电路等的设计,实现了四相步进电机的正反转,急停等功能。为实现单片机控制步进电机系统在数控机床上的应用,系统设计了两个外部中断,以实现步进电机在某段时间内的反复正反转功能,也即数控机床的刀架自动进给运动,随着单片机技术的不断发展,单片机在日用电子产品中的应用越来越广泛,自六十年代初期以来,步进电机的应用得到很大的提高。人们用它来驱动时钟和其他采用指针的仪器,打印机、绘图仪,磁盘光盘驱动器、各种自动控制阀、各种工具,还有机器人等机械装置。此外作为执行元件,步进电机是机电一体化的关键产品之一,被广泛应用在各种自动化控制系统中,随着微电子和计算机技术的发展,它的需要量与日俱增,在各个国民经济领域都有应用。步进电机是机电数字控制系统中常用的执行元件,由于其精度高、体积小、控制方便灵活,因此在智能仪表和位置控制中得到了广泛的应用,大规模集成电路的发展以及单片机技术的迅速普及,为设计功能强,价格低的步进电机控制驱动器提供了先进的技术和充足的资源。 关键字: 步进电机单片机
力矩电机控制器 工作原理
本控制器为代替三相自耦变压器,而专门设计的一种先进的全电子化控制装置,能工作在电阻、电感性负载。广泛适用于五金机械塑料、电线、电缆、绳网、印刷、造纸、纺织、印染、化疑纤、橡绞、电影胶皮等各种机械、机电行业。 与三相自藕调压器相比较,本控制器由于采用了电子调节,无触点磨损,电压调节平衡,起动性能好,本控制器具有体积小、重量轻、效率高、发热小、节约能源(经测定平均节能17%以上),使用寿命长、安装、维修方便。 二、工作条件: 1、环境温度:-25℃~+55℃。 2、空气相对湿度:≤85%(20℃±5℃)。 3、无显著冲击震动外。 4、工作电压:三相电压交流380V、220V(±10%)。 5、50~60HZ。 三、工作原理: 三相调压器调速控制器主回路采用进口双向可控硅,改变可控制硅的开放角大小,就能使电机或其它负载的工作电压从0至375V连续可调,也就实现了平衡地调压调速过程,以满足不同生产的工艺要求。 在可控硅控制电路中采用了三相同步集成模块,加入了电流正反馈,构成一个闭环控制系统。既提高了力矩电机的机械性硬度,又改善了力矩电机在低电压时的起动性能,同时还提高了力矩电机的过载能力,扩大了力矩电机的使用范围。为了使调速过程尽快进入稳定状态,在控制回路中还加入了电压反馈,以提高控制器的技术性能。 四、使用方法: 接线说明:请严格按以下接线示意图接线,D1、D2、D3三点为控制器的输出端,接力矩电机的电源线柱W1V1U1(Ⅱ型力矩电机必须为Y接法及星型接法,电机中性点W2V2U2必须严格接电源零线N,否则,本控制器无法正常工作或烧毁本装置。) 1、调速旋钮旋至零位。 2、接通总电源,打开控制器开关。(指示灯亮) 3、整好面板上反馈设定按键。(一般不需调节,出厂时已按常规设定好,可适用不同启动电压的力矩电机)。 4、调节调速电位器旋钮,使电机达到你所需的速度。
异步电机矢量控制
目录 1引言 (1) 1.1 交流电机调速系统发展的现状 (1) 1.2 矢量控制的现状 (1) 1.3 课题的研究背景及意义 (2) 1.4 本课题的主要内容 (2) 2 矢量控制的基本原理 (4) 2.1 坐标变换的基本思路 (4) 2.2 矢量控制坐标变换 (5) 2.3 矢量控制系统结构 (8) 3 转子磁链定向的矢量控制方程及解耦控制 (10) 4 转速、磁链闭环控制的矢量控制系统 (13) 4.1 带磁链除法环节的直接矢量控制系统 (13) 4.2 带转矩内环的直接矢量控制系统 (13) 5 控制系统的设计与仿真 (15) 5.1 矢量控制系统的设计 (15) 5.2 异步电动机的重要子模块模型 (16) 5.3 系统仿真结果和分析 (18) 6 结论 (21) 参考文献 (22) 致谢.............................................................................................. 错误!未定义书签。
1引言 1.1 交流电机调速系统发展的现状 在当今用电系统中,电动机作为主要的动力设备而广泛地应用于工农业生产、防、科技及社会生活的方方面面[1] [2] [3] [4]。电动机负荷约占总发电量的60%~70%,成为电量最多的电气设备。根据采用的电流制式不同,电动机分为直流电动机和交电动机两大类,交流电动机分为同步电动机和异步电动机两种。电动机作为把能转换为机械能的主要设备,在实际的应用中,一是要使电动机具有较高的机能量转换效率:二是要根据生产机械的工艺要求控制并调节电动机的转速。电动的调速性能直接影响着产品质量、劳动生产效率和节电性能。 但是直到20世纪70年代,凡是要求调速范围广、速度控制精度高和动态响性能好的场合,几乎全都采用直流电动机调速系统。其原因主要是:(1)不论异步电动机还是同步电动机,唯有改变定子供电频率调速是最为方便的,而且以获得优异的调速特性。但大容量的变频电源却在长时期内没有得到很好的解;(2)异步电动机和直流电动机不同,它只有一个供电回路—定子绕阻,致其速度控制比较困难,不像直流电动机那样通过控制电枢电压或控制励磁电流可方便地控制电动机的转速。但交流电机,特别是笼式异步电动机,拥有结构单、坚固耐用、价格便宜且不需要经常维修等优点,正是这些突出的优点使得气工程师们没有放弃对电力牵引交流传动技术的探索和发展。进入20世纪70代,由于电力电子器件制造技术和微电子技术的突破和发展,先进的控制理论矢量控制、直接转矩控制等具有高动态控制性能的新技术开始被采用,使得交传动进入一个崭新的阶段。 交流电动机的诞生已有一百多年的历史,时至今日已经研制出了形式、用途容量等各种不同的品种。交流电动机分为同步电动机和异步电动机两大类。同电动机的转子转速与定子电流的频率保持严格不变的关系:异步电动机则不保这种关系。其中交流异步电动机拥有量最多,提供给工业生产的电量多半是通交流电动机加以利用的。据统计,交流电动机用电量约占电机总用电量的85%。 1.2 矢量控制的现状 自20世纪70年代,德国西门子公司的EBlasehke提出了“磁场定向控制的理论”和美国的PC.Custmna与A.AQark申请了专利“感应电机定子电压的坐标交换控
步进电机与开关磁阻电机
开关磁阻电机: 开关磁阻电动机驱动系统(SRD)是较为复杂的机电一体化装置,SRD的运行需要在线实时检测的反馈量一般有转子位置、速度及电流等,然后根据控制目标综合这些信息给出控制指令,实现运行控制及保护等功能。转子位置检测环节是SRD的重要组成部分,检测到的转子位置信号是各相主开关器件正确进行逻辑切换的根据,也为速度控制环节提供了速度反馈信号。 开关磁阻电机具有再生的能力,系统效率高: 对开关磁阻电机的理论研究和实践证明,该系统具有许多显著的优点: (1)电机结构简单、坚固,制造工艺简单,成本低,可工作于极高转速;定子线圈嵌放容易,端部短而牢固,工作可靠,能适用于各种恶劣、高温甚至强振动环境。 (2)损耗主要产生在定子,电机易于冷却;转子无永磁体,可允许有较高的温升。 (3)转矩方向与电流方向无关,从而可最大限度简化功率变换器,降低系统成本。 (4)功率变换器不会出现直通故障,可靠性高。 (5)起动转矩大,低速性能好,无感应电动机在起动时所出现的冲击电流现象。 (6)调速范围宽,控制灵活,易于实现各种特殊要求的转矩-速度特性。 (7)在宽广的转速和功率范围内都具有高效率 (8)能四象限运行,具有较强的再生制动能力。 (9)容错能力强。开关磁阻电机的容错体现在电机某一相损坏,电机照样可以运行。 开关磁阻电机的应用: 近年来,开关磁阻电机的应用和发展取得了明显的进步,已成功地应用于电动车驱动、通用工业、家用电器和纺织机械等各个领域,功率范围从10W到5MW,最大速度高达100000 r/min。
开关磁阻电机电动车应用 开关磁阻电机最初的应用领域就是电动车。目前电动摩托车和电动自行车的驱动电机主要有永磁无刷及永磁有刷两种,然而采用开关磁阻电机驱动有其独特的优势。当高能量密度和系统效率为关键指标时,开关磁阻电机变为首选对象。 SRD开关磁阻电机驱动系统的电机结构紧凑牢固,适合于高速运行,并且驱动电路简单成本低、性能可靠,在宽广的转速范围内效率都比较高,而且可以方便地实现四象限控制。这些特点使SRD开关磁阻电机驱动系统很适合电动车辆的各种工况下运行,是电动车辆中极具有潜力的机种。SRD的最大特点是转矩脉动大,噪声大;此外,相对永磁电机而言,功率密度和效率偏低;另一个缺点是要使用位置传感器,增加了结构复杂性,降低了可靠性。因此无传感器的SRD也是未来的发展趋势之一。其优点主要表现在以下几个方面: (1)开关磁阻电机不仅效率高,而且在很宽的功率和转速范围内都能保持高效率,这是其它类型驱动系统难以达到的。这种特性对电动车的运行情况尤为适合,有利于提高电动车的续驶里程。 (2)开关磁阻电机很容易通过采用适当的控制策略和系统设计满足电动车四象限运行的要求,并且还能在高速运行区域保持强有力的制动能力。 (3)开关磁阻电机有很好的散热特性,从而能以小的体积取得较大的输出功率,减小电机体积和重量。 (4)通过调整开通角和关断角,开关磁阻电机完全可以达到它激直流电机驱动系统良好的控制特性,而且这是一种纯逻辑的控制方式,很容易智能化,从而能通过重新编程或替换电路元件,方便地满足不同运行特性的要求。 (5)开关磁阻电机无论电机还是功率变换器都十分坚固可靠,无需或很少
异步电动机矢量控制系统的仿真
异步电动机矢量控制系统仿真 1.异步电机矢量控制系统的原理及其仿真 1.1 异步电动机矢量控制原理 异步电机矢量变换控制系统和直接转矩控制系统都是目前已经获得使用的高性能异步电机调速系统,对比直接转矩控制系统,矢量变换系统有可以连续控制,调速范围宽的优点,因此矢量变换控制系统为现代交流调速的重要方向之一。 本文采用的是转子磁场间接定向电流控制型交流异步电机矢量控制系统[1],如图1所示。 图1矢量变换控制系统仿真原理图 如果把转子磁链方向按空间旋转坐标系的M轴方向定向,则可得到按转子磁场方式定向下的三相鼠笼式异步电动机的矢量控制方程。 (1) (2) (3) (4)
(5) 上列各式中,是转子励磁电流参考值;是转差角频率给定值;是定子电流的励磁分量;是定子电流的转矩分量;是定子频率输入角频率; 是转子速度;是转子磁场定向角度;是转子时间常数;和分别是电机互感和转子自感。 图4所示控制系统中给定转速和实际电机转速相比较,误差信号送入转速调节器,经转速调节器作用产生给定转矩信号,电机的激磁电流给定信号根据电机实际转速由弱磁控制单元产生,再利用式(1)产生定子电流激磁分量给定信号,定子电流转矩分量给定信号则根据式(2)所示的电机电磁转矩表达式生成。、和转子时间常数Lr一起产生转差频率信号,和ωr相加生成转子磁场频率给定信号,对积分则得到转子磁场空间角度给定信号。和经坐标旋转和2/3相变换产生定子三相电流给定信号、和,和定子三相电流实测信号、和相比较,由滞环控制器产生逆变器所需的三相PWM信号。 1.2 异步电机转差型矢量控制系统建模 在MATLAB/SIMULINK环境下利用电气系统模块库中的元件搭建交流异步电机转差型矢量控制系统[2],电流控制变频模型如图2所示。 图2 电流控制变频模型图 整个仿真图由电气系统模块库中的元件搭建组成,元件的直观连接和实际的主电路相像似,其中主要包括:速度给定环节,PI速度调节器、坐标变换模块、
直流电机控制系统设计
直流电机控制系统设计
XX大学 课程设计 (论文) 题目直流电机控制系统设计 班级 学号 学生姓名 指导教师
沈阳航空航天大学 课程设计任务书 课程名称专业基础课程设计 院(系)自动化学院专业测控技术与仪器 班级学号姓名 课程设计题目直流电机控制系统设计 课程设计时间: 2012年7 月9 日至2012年7 月20 日 课程设计的内容及要求: 1.内容 利用51单片机开发板设计并制作一个直流电机控制系统。系统能够实时控制电机的正转、反转、启动、停止、加速、减速等。 2.要求 (1)掌握直流电机的工作原理及编程方法。 (2)掌握直流电机驱动电路的设计方法。 (3)制定设计方案,绘制系统工作框图,给出系统电路原理图。 (4)用汇编或C语言进行程序设计与调试。 (5)完成系统硬件电路的设计。 (6)撰写一篇7000字左右的课程设计报告。 指导教师年月日 负责教师年月日
学生签字年月日 目录 0 前言 (1) 1 总体方案设计 (2) 1.1 系统方案 (2) 1.2 系统构成 (2) 1.3 电路工作原理 (2) 1.4 方案选择 (3) 2 硬件电路设计 (3) 2.1 系统分析与硬件设计 (3) 2.2 单片机AT89C52 (3) 2.3 复位电路和时钟电路 (4) 2.4 直流电机驱动电路设计 (4) 2.5 键盘电路设计 (4) 3软件设计 (5) 3.1 应用软件的编制和调试 (5) 3.2 程序总体设计 (5) 3.3 仿真图形 (7) 4 调试分析 (9) 5 结论及进一步设想 (9) 参考文献 (10) 课设体会 (11) 附录1 电路原理图 (12) 附录2 程序清单 (13)
力矩电机调速控制器的设计
设计(论文)专用纸力矩电机调速控制器的设计 学校: 昆明理工大学 学院: 应用技术学院 姓名: 专业班级:电子信息工程081 指导教师单位: 应用技术学院 指导教师姓名:仉月仙 指导教师职称:讲师
设计(论文)专用纸Torque motor speed controller design University: Kunming University of Science and Technology Faculty: Faculty of Applied Technology Name: Wu Wen Ya Professional class: Electronic Information Engineering 081 Faculty Adviser Unit: Faculty of Applied Technology Faculty Adviser Name: Zhang Yue Xian Professional Title: Lecturer
设计(论文)专用纸 目录 摘要 (1) ABSTRACT (2) 前言 (3) 第一章绪论 (5) 1.1力矩电机 (5) 1.2调压调速 (6) 1.3课题研究的背景及其意义 (7) 1.4设计的主要目标任务 (7) 第二章设计方案及其论证 (9) 第三章系统硬件电路设计 (12) 3.1电源模块设计 (12) 3.1.1 电源的方案设计 (12) 3.1.2 元器件的选择 (12) 3.1.3 电源电路的电路图 (15) 3.1.4 元器件明细表 (15) 3.2主电路的模块设计 (16) 3.2.1 主电路方案设计 (16) 3.2.2 元器件的选择 (16) 3.2.3 主电路电路图 (19) 3.2.4 元器件明细表 (19) 3.3控制电路部分设计 (20) 3.3.1 控制电路方案设计 (20) 3.3.2 控制电路元件的选择 (20) 3.3.3 控制电路电路图 (30) 3.3.4 元件明细表 (31) 第四章调试与制作 (33) 4.1制作过程 (33) 4.2调试过程 (33) 结论 (36) 总结与体会 (37) 谢辞 (39)
交流异步电动机变频调速系统设计样本
中南大学 《工程训练》 ——设计报告 设计题目:异步电机变频调速 指引教师:黎群辉 设计人:冯露 学号: 专业班级:自动化0906班 设计日期:9月
交流异步电动机变频调速系统设计 摘要 近年来,交流电机变频调速及其有关技术研究己成为当代电气传动领域一种重要课题,并且随着新电力电子器件和微解决器推出以及交流电机控制理论发展,交流变频调速技术还将会获得巨大进步。 本文对变频调速理论,逆变技术,SPWM产生原理进行了研究,在此基本上设计了一种新型数字化三相SPWM变频调速系统,以8051控制专用集成芯片 SA4828为控制核心,采用IGBT作为主功率器件,同步采用EXB840构成IGBT驱动电路,整流电路采用二极管,可使功率因数接近1,并且只用一级可控功率环节,电路构造比较简朴。 V控制,同步,软件程序使得参数输入和变频器运营方式变本文在控制上采用恒 f 化极为以便,新型集成元件采用也使得它开发周期短。 此外,本文对SA4828三相SPWM波发生器使用和编程进行了详细简介,完毕了整个系统控制某些软硬件设计。 V控制,SA4828波形发生器 核心字:变频调速,正弦脉宽调制, f
目录 摘要................................................ 错误!未定义书签。 1.1 研究目与意义 (1) 1.2本次设计方案简介 (2) 1.2.1 变频器主电路方案选定 (2) 1.2.2 系统原理框图及各某些简介 (3) 1.2.3 选用电动机原始参数 (4) 2交流异步电动机变频调速原理及办法 (5) 2.1 异步电机变频调速原理 (5) 2.2 变频调速控制方式及选定 (6) V比恒定控制 (6) 2.2.1 f 2.2.2 其他控制方式................................ 错误!未定义书签。3变频器主电路设计. (13) 3.1 主电路工作原理 (13) 3.2 主电路各某些设计 (13) 3.3. 采用EXB840IGBT驱动电路 (15) 4控制回路设计 (16) 4.1 驱动电路设计 (16) 4.2 保护电路......................................... 错误!未定义书签。 4.2.1 过、欠压保护电路设计........................ 错误!未定义书签。 4.2.2 过流保护设计................................ 错误!未定义书签。 4.3 控制系统实现 (19) 5变频器软件设计....................................... 错误!未定义书签。 5.1 流程图 (22)
异步电机的矢量控制系统
电力拖动课程结题报告 题目:异步电机的矢量控制系统 班级:K0312417 姓名:罗开元 学号:K031241723 老师:郎建勋老师 2015年 6月 22 日
前言 异步电机的矢量控制设计及仿真在矢量控制技术出现之前,交流调速系统多为V / f 比值恒定控制方法,又常称为标量控制。采用这种方法在低速及动态(如加减速)、加减负载等情况时,系统表现出明显的缺陷,所以交流调速系统的稳定性、启动、低速时的转矩动态相应都不如直流调速系统。随着电力电子技术的发展,交流异步电机控制技术全面从标量控制转向了矢量控制,采用矢量控制的交流电机完全可以和直流电机的控制效果相媲美,甚至超过直流调速系统。 矢量变换控制(以下简称VC)技术的诞生和发展为现代交流调速技术的发展提供了理论基础。交流电动机是一个多变量、非线性、强耦合的被控对象,采用了参数重构和状态重构的现代控制理论概念可以实现交流电动机定子电流的励磁分量和转矩分量之间的解耦,实现了将交流电动机的控制过程等效为直流电动机的控制过程。这就使得交流调速系统的动态性能得到了显著的改善和提高,从而使交流调速最终取代直流调速系统成为可能。实践证明,采用矢量控制方法的交流调速系统的优越性高于直流调速系统。矢量控制原理的出现也促进了其它控制方法的产生,如多变量解耦控制等方法。 七十年代初期,西门子公司的F .Blashke 和W .Flotor 提出了“感应电机磁场定向的控制原理”,通过矢量旋转变换和转子磁场定向,将定子电流按转子磁链空间方向分解成为励磁分量和转矩分量,这样就可以达到对交流电机的磁链和电流分别控制的目的,得到了类似于直流电机的模型,然后模拟直流电机进行控制,可以获得良好的静、动态调速性能。本文分析异步电机的数学模型及矢量控制原理的基础上, 利Matlab/Simulink 中SimPowerSystems 模块,采用模块化的思想分别建立了交流异步电机模块、矢量控制器模块、坐标变换模块、磁链调节器模块、速度调节模块, 再进行功能模块的有机整合, 构成了按转子磁场定向的异步 电机矢量控制系统仿真模型。仿真结果表明该系统转速动态响应快、稳态静差小、抗负载扰动能力强, 验证了交流电机矢量控制的可行性、有效性。 1.异步电机的 VC 原理 1.1 坐标变换 坐标变换的目的是将交流电动机的物理模型变换成类似直流电动机的模式,这样变换后,分析和控制交流电动机就可以大大简化。以产生同样的旋转磁动势为准则,在三相坐标 系上的定子交流电机A i 、B i 、C i ,通过3/2变换可以等效成两相静止坐标系上的交流电流 α i 和 β i ,再通过同步旋转变换,可以等效成同步旋转坐标系上的直流电流 d i 和q i 。如果观察 者站到铁心上与坐标系一起旋转,他所看到的就好像是一台直流电动机。 把上述等效关系用结构图的形式画出来,得到图l 。从整体上看,输人为A ,B ,C 三相电压,输出为转速ω,是一台异步电动机。从结构图内部看,经过3/2变换和按转子磁链
直流电机控制系统设计.
XX大学 课程设计 (论文) 题目直流电机控制系统设计 班级 学号 学生姓名
指导教师 航空航天大学 课程设计任务书 课程名称专业基础课程设计 院(系)自动化学院专业测控技术与仪器 班级学号 课程设计题目直流电机控制系统设计 课程设计时间: 2012年7月9日至2012年7月20日 课程设计的容及要求: 1.容 利用51单片机开发板设计并制作一个直流电机控制系统。系统能够实时控制电机的正转、反转、启动、停止、加速、减速等。 2.要求 (1)掌握直流电机的工作原理及编程方法。 (2)掌握直流电机驱动电路的设计方法。 (3)制定设计方案,绘制系统工作框图,给出系统电路原理图。 (4)用汇编或C语言进行程序设计与调试。 (5)完成系统硬件电路的设计。 (6)撰写一篇7000字左右的课程设计报告。
指导教师年月日 负责教师年月日 学生签字年月日 目录 0 前言1 1 总体方案设计2 1.1 系统方案2 1.2 系统构成2 1.3 电路工作原理2 1.4 方案选择3 2 硬件电路设计3 2.1 系统分析与硬件设计3 2.2 单片机AT89C523 2.3 复位电路和时钟电路4 2.4 直流电机驱动电路设计4 2.5 键盘电路设计4 3软件设计5 3.1 应用软件的编制和调试5 3.2 程序总体设计5
3.3 仿真图形7 4 调试分析9 5 结论及进一步设想9参考文献10 课设体会11 附录1 电路原理图12附录2 程序清单13
直流电机调速系统设计 XXXXX大学自动化学院 摘要:本篇论文介绍了基于单片机的直流电机PWN调速的基本办法,直流电机调速的相关知识以及PWM调速的基本原理和实现方法。重点介绍了基于MCS-51单片机的用软件产生PWM信号以及信号占空比调节的方法。对于直流电机速度控制系统的实现提供了一种有效的途径。 直流电动机具有优良的调速特性,调速平滑,方便,调速围广,过载能力大,能承受频繁的冲击负载,可实现频繁的无级快速起动、制动和反转;能满足生产过程中自动化系统各种不同的特殊运行要求。电动机调速系统采用微机实现自动控制,是电气传动发展的主要方向之一。采用微机控制后,整个调速系统体积小,结构简单、可靠性高、操作维护方便,电动机稳态运转时转速精度可达到较高水平,静动态各项指标均能较好地满足工业生产中高性能电气传动的要求。 关键词:单片机最小系统;PWM ;直流电机调速; 0 前言 电动机作为最主要的机电能量转换装置,其应用围已遍及国民经济的各个领域和人们的日常生活。无论是在工农业生产,交通运输,国防,航空航天,医疗卫生,商务和办公设备中,还是在日常生活的家用电器和消费电子产品(如电冰箱,空调,DVD等)中,都大量使用着各种各样的电动机。据资料显示,在所有动力资源中,百分之九十以上来自电动机。同样,我国生产的电能中有百分之六十是用于电动机的。电动机与人的生活息息相关,密不可分。电气时代,电动机的调速控制一般采用模拟法,对电动机的简单控制应用比较多。简单控制是指对电动机进行启动,制动,正反转控制和顺序控制。然而近年来,随着技术的发展和进步,以及市场对产品功能和性能的要求不断提高,直流电动机的应用更加广泛,尤其是在智能机器人中的应用。直流电动机的起动和调速性能、过载能力强等特点显得十分重要,为了能够适应发展的要求,单闭环直流电动机的调速控制系统得到了很大的发展。而作为单片嵌入式系统的核心—单片机,正朝着多功能、多选择、高速度、低功耗、低价格、大存储容量和强I/O功能等方向发展。随着计算机档次的不断提高,功能的不断完善,单片机已越来越广泛地应用在各种领域的控制、自动化、智能化等方面,特别是在直流电动机的调速控制系统中。这是因为单片机具有很多优点:体积小,功能全,抗干扰能力强,可靠性高,结构合理,指令丰富,控制功能强,造价低等。所以选用单片机作为控制系统的核心以提高整个系统的可靠性和可行性。
力矩控制器原理与接线
力矩控制器 一.概述 力矩控制器为代替三相自耦变压器,而专门设计的一种先进的全电子化控制装置,能工作在电阻、电感性负载。此控制器广泛应用于五金机械塑料、电线、电缆、绳网、印刷、造纸、纺织、印染、化疑纤、橡绞、电影胶皮等各种机械、机电行业。 与三相自藕调压器相比较,本控制器由于采用了电子调节,无触点磨损,电压调节平衡,起动性能好,本控制器具有体积小、重量轻、效率高、发热小、节约能源(经测定平均节能17%以上),使用寿命长、安装、维修方便。 二.技术参数 1.输入电压:三相交流电压 380V±10% 2.输出电压:三相交流电压 0-380V 3.额定电流:标称电流(面板上标称的电流) 4.输出电压可以无极调节,从而使电机实现无极调速 5、频率50~60HZ。 三.工作环境 1、环境温度:-25℃~+55℃。 2、空气相对湿度:≤85%(20℃±5℃)。 3、无显著冲击震动。 四.工作原理 三相调压器调速控制器主回路采用进口双向可控硅,改变可控硅的开放角大小,就能使电机或其它负载的工作电压从0至380V连续可调,也就实现了平衡地调压调速过程,以满足不同生产的工艺要求。 在可控硅控制电路中采用了先进的集成电路,加入了电
流回馈, 构成一个循环控制系统。既提高了力矩电机的机械性硬度,又改善性能,同时还提高了力矩电机的超载能力,扩大了力矩电机的使用范围。为了使调速过程尽快进入稳定状态,在控制回路中还加入了电压回馈以提高控制器的技术性能。 五.使用方法 1. 接线说明:请严格按以下接线示意图接线:D1、D2、D3三点为 控制器的输出端,接力矩电机;A 、B 、C 、为输入端接三相380V 电源。 N 为零线接口,接零线。 2.旋钮旋至零位。 3.总电源。(指示灯亮) 4.控制开关,调节调速电位器旋钮,使电机达到你所需的速度。 5. 电位器为精密长寿电位器。 六.注意事项 1.严禁输出短路。 2.严禁使用中,负载电流超过过面板标称电流值。 3、严禁零线N 接入电机星点. 4、若控制器出现问题务必请专业人员检修,以免使故障范围扩大. 六.接线图 A B C D1D2D3A B C 输入 380V 输出 0~380V V 1 U1 W1 W2V 2U2力矩电机 A B C D1D2D3 A B C 输入 380V 输出 0~380V V 1 U1 W1 W2V 2U2力矩电机 N
开关磁阻电机速度控制
Journal of Electrical Engineering 电气工程, 2016, 4(1), 55-62 Published Online March 2016 in Hans. https://www.360docs.net/doc/de15700940.html,/journal/jee https://www.360docs.net/doc/de15700940.html,/10.12677/jee.2016.41008 Speed Control Strategy of Switched Reluctance Motor Zhou Du1,2, Dingxiang Wu2,3, Lijun Tang1,2 1School of Physics and Electronic Sciences, Changsha University of Science & Technology, Changsha Hunan 2Hunan Province Higher Education Key Laboratory of Modeling and Monitoring on the Near-Earth Eletromagnetic Environments, Changsha Hunan 3Billion Set Electronic Technology Co, Ltd., Changsha Hunan Received: Mar. 1st, 2016; accepted: Mar. 19th, 2016; published: Mar. 24th, 2016 Copyright ? 2016 by authors and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). https://www.360docs.net/doc/de15700940.html,/licenses/by/4.0/ Abstract Aimed at research on starting mode and speed control of switched reluctance motor speed control system, a two-phase starting is adopted to start the electric, in order to increase the torque and reduce the torque ripple. A fuzzy adaptive PID control algorithm is proposed, and a switched re-luctance motor speed control system with STM32 + FPGA as the main controller is designed, ap-plying current chopping in low speed and angle position control mode in high speed, which has a certain effect on solving the problems of high overshoot, slow dynamic response and low accuracy. The experimental results show that the precision of the system speed is within 10 r/min, and the maximum overshoot is 15 r/min. Keywords Switched Reluctance Motor, Torque Ripple, Fuzzy Adaptive Tuning PID 开关磁阻电机速度控制 杜舟1,2,吴定祥2,3,唐立军1,2 1长沙理工大学物理与电子科学学院,湖南长沙 2近地空间电磁环境监测与建模湖南省普通高校重点实验室,湖南长沙 3长沙亿旭机电科技有限公司,湖南长沙
无刷直流电机控制系统的设计
1引言无刷直流电机最本质的特征是没有机械换向器和电刷所构成的机械接触式换向机构。现在,无刷直流电机定义有俩种:一种是方波/梯形波直流电机才可以被称为无刷直流电机,而正弦波直流电机则被认为是永磁同步电机。另一种是方波/梯形波直流电机和正弦波直流电机都是无刷直流电机。国际电器制造业协会在1987年将无刷直流电机定义为“一种转子为永磁体,带转子位置信号,通过电子换相控制的自同步旋转电机”,其换相电路可以是独立的或集成于电机本体上的。本次设计采用第一种定义,把具有方波/梯形波无刷直流电机称为无刷直流电机。从20世纪90年代开始,由于人们生活水平的不断提高和现代化生产、办公自动化的发展,家用电器、工业机器人等设备都向着高效率化、小型化及高智能化发展,电机作为设备的重要组成部分,必须具有精度高、速度快、效率高等优点,因此无刷直流电机的应用也发展迅速[1]。 1.1 无刷直流电机的发展概况 无刷直流电动机是由有刷直流电动机的基础上发展过来的。 19世纪40年代,第一台直流电动机研制成功,经过70多年不断的发展,直流电机进入成熟阶段,并且运用广泛。 1955年,美国的D.Harrison申请了用晶体管换相线路代替有刷直流电动机的机械电刷的专利,形成了现代无刷直流电动机的雏形。 在20世纪60年代初,霍尔元件等位置传感器和电子换向线路的发现,标志着真正的无刷直流电机的出现。 20世纪70年代初,德国人Blaschke提出矢量控制理论,无刷直流电机的性能控制水平得到进一步的提高,极大地推动了电机在高性能领域的应用。 1987年,在北京举办的德国金属加工设备展览会上,西门子和博世两公司展出了永磁自同步伺服系统和驱动器,引起了我国有关学者的注意,自此我国开始了研制和开发电机控制系统和驱动的热潮。目前,我国无刷直流电机的系列产品越来越多,形成了生产规模。 无刷直流电动机的发展主要取决于电子电力技术的发展,无刷直流电机发展的初期,由于大功率开关器件的发展处于初级阶段,性能差,价格贵,而且受永磁材料和驱动控制技术的约束,这让无刷直流电动机问世以后的很长一段时间内,都停
(交流电机变频调速系统设计)
机电传动与控制课程综合训练三 一、综合训练项目任务书 综合训练项目:交流电机变频调速系统 目的和要求:加强对交流变频调速系统及变频器的理解;应用交流变频调速系统及变频器解决交流电机变频调速问题。提高分析和解决实际工程问题的能力。促成“富于探索精神,具有较强的自学能力、开拓创新意识和敏锐的观察事物以及分析处理事物的能力”的目标实现。 成果形式:交流电机变频调速系统设计说明书。 相关参数:参看《机电传动控制》(第五版),冯清秀等编著,华中科技大学出版社,P291~316。 一、综合训练项目设计内容 1.变频调速系统 1.1 三相交流异步电动机的结构和工作原理 三相交流异步电动机是把电能转换成机械能的设备。一般电动机主要由两部分组成:固定部分称为定子,旋转部分称为转子。三相交流异步电动机的工作原理是建立在电磁感应定律、全电流定律、电路定律和电磁力定律等基础上的。当磁极沿顺时针方向旋转,磁极的磁力线切割转子导条,导条中就感应出电动势。电动势的方向由右手定则来确定。因为运动是相对的,假如磁极不动,转子导条沿逆时针方向旋转,则导条中同样也能感应出电动势来。在电动势的作用下,闭合的导条中就产生电流。该电流与旋转磁极的磁场相互作用,而使转子导条受到电磁力,电磁力的方向可用左手定则确定。由电磁力进而产生电磁转矩,转子就转动起来。 1.2 变频调速原理 变频器可以分为四个部分,如图1.1所示。 通用变频器由主电路和控制回路组成。给异步电动机提供调压调频电源的电力变换部分,称为主电路。主电路包括整流器、中间直流环节(又称平波回路)、逆变器。
图1.1 变频器简化结构图 ⑴整流器。它的作用是把工频电源变换成直流电源。 ⑵平波回路(中间直流环节)。由于逆变器的负载为异步电动机,属于感性负载。无论电动机处于电动状态还是发电状态,起始功率因数总不会等于1。因此,在中间直流环节和电动机之间总会有无功功率的交换,这种无功能量要靠中间直流环节的储能元件—电容器或电感器来缓冲,所以中间直流环节实际上是中间储能环节。 ⑶逆变器。与整流器的作用相反,逆变器是将直流功率变换为所要求频率的交流功率。逆变器的结构形式是利用6个半导体开关器件组成的三相桥式逆变器电路。通过有规律的控制逆变器中主开关的导通和断开,可以得到任意频率的三相交流输出波形。 ⑷控制回路。控制回路常由运算电路,检测电路,控制信号的输入、输出电路,驱动电路和制动电路等构成。其主要任务是完成对逆变器的开关控制,对整流器的电压控制,以及完成各种保护功能。控制方式有模拟控制或数字控制。 2.系统的控制模型 本系统的结构如图1.2所示。