直流电机H桥驱动原理和驱动电路选择L9110
直流电机H桥驱动原理和驱动电路选择L9110L298N LMD18200
直流电机H桥驱动原理和 L9110 L298N LMD18200 电路
在直流电机驱动电路的设计中,主要考虑一下几点:
1.功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机
即可,当电机需要双向转动时,可以使用由4 个功率元件组成的H 桥电路或者使用一个双刀双掷的继电器。如果不需要调速,只要使
用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。
2.性能:对于PWM 调速的电机驱动电路,主要有以下性能指标。 1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。
2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防
止共态导通(H 桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。
3)对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或
光电耦合器实现隔离。
4)对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。
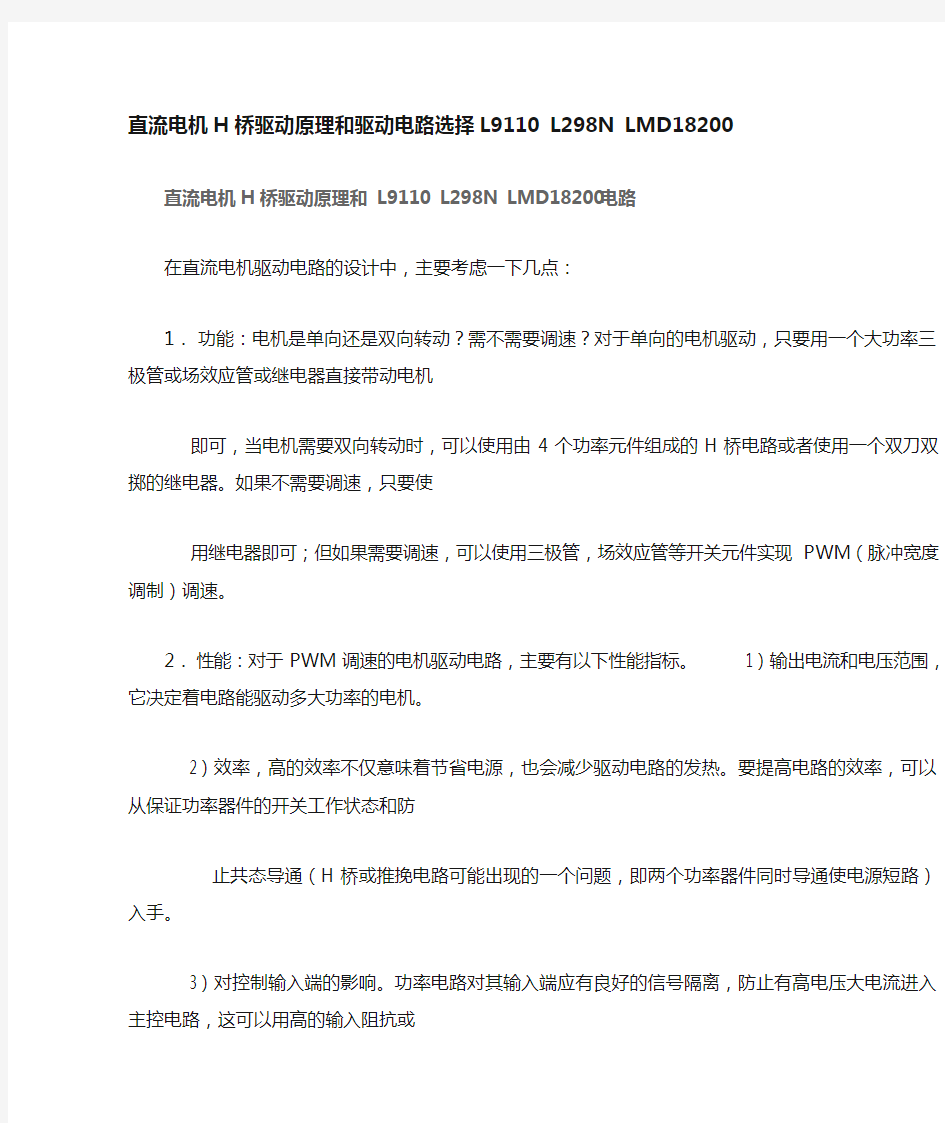
5)可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。H桥驱动电路: H桥式电机驱动电路包括4个三极管和一个电机,因其外形酷似字母'H',所以称作H桥驱动电路。
要使电机M运转,必须使对角线上的一对三极管导通。例如当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。电机顺时针转动。当三极管Q2和Q3导通时,电流将从右至左流过电机,驱动电机逆时针方向转动。
完整的晶体管H桥驱动电路,PWM1,PWM2,为电机方向控制输入端,PWM1=1,PWM2=0时正转,PWM=0,PWM2=1时电机反转。
PWM1,PWM2同时也是电机调速的脉宽输入端。
晶体管是最为廉价的控制方法,但在晶体管上有明显的压降,会产生功率的损耗,效率不高,适宜应用在低电压,小功率的场合。
下图是场效应管组成的H桥驱动电路,场效应管是效率最高的控制方式,但价格较高,通常应用在大功率电
机驱动场合。
上面都是有分立元件构成的电路,实际使用中制作麻烦,故障率高。通常采用集成的H桥驱动芯片,集成度高,使用方便,可靠性高。如L9110,L298N,LMD18200,TA7257P、SN754410,MC33886等。 L9110驱动电路:
L9110 是为控制和驱动电机设计的两通道推挽式功率放大专用集成电路器件,将分立电路集成在单片IC 之中,使外围器件成本降低,整机可靠性提高。该芯片有两个TTL/CMOS兼容电平的输入,可直接与单片机接口,具有良好的抗干扰性;两个输出端能直接驱动电机的正反向运动,它具有较大的电流驱动能力,每通道
能通过750~800mA 的持续电流,峰值电流能力可达1.5~2.0A;同时它具有较低的输出饱和压降;内置的钳位二极管能释放感性负载的反向冲击电流,使它在驱动继电器、直流电机、步进电机或开关功率管的使用上安全可靠。L9110 被广泛应用于玩具汽车电机驱动、步进电机驱动和开关功率管等电路上。宽电压工作范围2.5V~12v。
L298N驱动电路:
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。该芯片采用15脚封装。主要特点是:工作电压高,3~46V,输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制,与单片机管脚直接连接;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作,有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱
动两台直流电机。
VS 位电机驱动电源,VSS为逻辑控制电源。
下图中PA0~PA3为单片机的I/O脚,控制两个DC电机M1,M2正反转。
4相步进电机驱动电路
LMD18200驱动电路:
LMD18200 是美国国家半导体公司(NS)推出的专用于运动控制的H 桥组件。同一芯片上集成有CMOS 控制电路和DMOS 功率器件, 峰值输出电流高达6A , 连续输出电流达3A , 工作电压高达55V , 还具有温度报警和过热与短路保护功能。
内部集成了四个DMOS管,组成一个标准的H型驱动桥。通过充电泵电路为上桥臂的2个开关管提供栅极控制电压,充电泵
电路由一个300kHz左右的工作频率。可在引脚1、11外接电容形成第二个充电泵电路,外接电容越大,向开关管栅极输入的
电容充电速度越快,电压上升的时间越短,工作频率可以更高。引脚2、10接直流电机,正转时电流的方向应该从引脚
步到引脚10;反转时电流的方向应该从引脚10到引脚2。电流检测输出引脚8可以接一个对地电阻,通过电阻来输出过流情
况。内部保护电路设置的过电流阈值为10A,当超过该值时会自动封锁输出,并周期性的自动恢复输出。如果过电流持续时
间较长,过热保护将关闭整个输出。过热信号还可通过引脚9输出,当结温达到145度时引脚9有输出信号。 PB0,PB1为单片机的I/O口,PB0控制电机的正反转,PB1输入脉宽控制电机的转速
直流电机驱动H桥
直流电机驱动H桥 直流电机驱动(H桥)原理研究与设计 学生姓名王俊岭周磊周雪瑞秦淦阿不都.沙拉木 指导教师杨焱青 系(部)创新实验室 论文写作日期 2011 年 12 月 20 日
第1章序论 1.1课题研究的目的 1.2本课题研究的意义 1.3方案论证 第2章基本原理 2.1声光节能灯基本原理 2.2555电路基本原理 2.3声控电路基本原理 2.4光控电路基本原理 第3章电路设计与分析 3.1电源电路 3.2声电转换机放大电路 3.3延时处理电路单稳态电路 3.4光控电路 第4章故障分析 第5章心得体会 第6章致谢 第一章序论 1.1 课题研究的目的 随着社会不断进步,科技发展,声光双控节电灯逐步走进社会各个公共角落,声光双控节电灯不仅适用于住宅区的楼道,而且也适用于工厂、办公楼、教学楼等公共场所,它具有体积小、外形美观、制作容易、工作可靠等优点,适合于各种楼房走廊
的照明设备。用声光控延时开关代替住宅小区的楼道上的开关,在天黑以后,当有人走过楼梯通道,发出脚步声或其它声音时,楼道灯会自动点亮,提供照明,当人们进入家门或走出公寓,楼道灯延时几分钟后会自动熄灭。在白天,即使有声音,楼道灯也不会亮,它解决了“长明灯”浪费电能的问题,延长灯泡的使用寿命,安全性好,可靠性高。该装置省去了能耗大、笨重、极易产生热量的电源变压器,具有结构简单、自耗电轻微、性能稳定、灵敏度高、通用性强,降低能耗、节约能源的目的。 1.2课题研究的意义 通过本课题的研究,加强了自己的动手能力,增强了团队意识,巩固了对所学知识的认知。通过本次试验我们设计了一种简易的直流电机驱动H桥转动的,不仅使自己学习到了知识,而且也为社会做出了贡献。 1.3 方案论证 方案1 主要包含四部分电路,分别为;电源电路,光控电路,声控延时电路,晶体管开 并电路,. 电源电路主要由微控制电路提供工作电压,本设计采用传统的电源电路设计方法, 即降压,整流,滤波,稳压,使电路输出电压6V直流电压供给控制电路. 光控制电路是根据光线强弱来优先决定电灯的亮灭,该电路可以对声控延 时电路进行控制,在白天光线强时,光控制电路输出低电平将声控电路封锁;在晚 上光线较弱时,光控制电路输出高电平,声控功能打开.本设计采用光敏电阻和其 他电阻组成的分压电路来控制555定时器的触发器输入端2脚,并将555定时器 的2脚和6脚连接在一起,通过电容接地,555定时器的输出去控制电路中的定时 器的复位端. 声控延时电路,该电路主要在光线较弱时起作用.这主要是通过光控电路的 输出来控制的.在晚上,光控电路将该电路的功能打开,使用该电路能根据外界声 音信号做出相应的响应.经放大处理后的声音信号控制处于单稳工作模式的555 定时器来实现声控延时功能. 晶体管开关电路,该电路受声控电路555定时器输出端的的控制.当其输 出高电平时,晶体管导通,照明灯点亮.
H桥驱动直流电机分析
H 桥驱动直流电机分析 1. H桥PWM变换器驱动电机运行过程 如图1所示,电动机M 两端电压U AB 的极性随开关器件驱动电压的变化而变化,这里分析双极式控制的可逆PWM 变换器。四个驱动电压波形如图2所示,它们的关系是 1423g g g g U U U U ==-=-.在 一个开关周期内,当0on t t ≤<时,1VT 和4VT 导通,2VT 和3 VT 关断,AB s U U =,电枢电流d i 沿 回路1流动;当on t t T ≤<时,1 VT 和4VT 关断, 2VT 和3VT 由于2VD 和3VD 的钳制作用不能马上导通,d i 沿回路2流经二极管续流, AB s U U =-. 当电机需要降速制动 时,先改变控制脉冲的占空比,使驱动电压的平均值d U 减小,但是由于机械惯性,转速和反电势还来不及变化,因而造成d E U >,很快使电流反向,在0on t t ≤<时,反向电流沿回路4向电源充电, 实现再生制动,而1VT 和4VT 被钳制不能导通;在on t t T ≤<时,2VT 和3VT 被打开,负向 电流通过2VT 和3VT ,实现能耗制动。当电机反向转动时,各器件的导通情况与上述情形相反。图3绘出了双极式控制时电机 图1 H 桥可逆PWM 变换器 图2 驱动电压
正转时的输出电压和电流波形。电动机的正反转则体现在驱动电压正负脉冲的宽窄上。当正脉冲较宽时, 2 on T t > ,则AB U 的平均值为正,电动机正转,反之则反转;如果正负脉冲相等,2 on T t = ,平均电压为零,则电动机停止。但电动机停止时电枢电压并不等于零,而是正负脉宽相等的交变脉冲电压,因而电流也是交变的,平均值为零,不产 生转矩,电动机损耗陡然增大,但是此时消除了正反向时的静摩擦死区,起“动态润滑”的作用。另外,图3所示的2d i 为轻载状态下的输出电流变化情况。2. 直流电机启动和降速过程 电动机在未启动之前,转速0n =,反电势0E =,而电枢电阻a R 很小,所以将电动 机加上额定电压时,启动电流/st n a I U R =将很大,可能烧坏整流子。所以在电机启动时 都采用限制电流的方法,下面讨论常用的电枢回路串接电阻的方法。图3 输出电压和电流
H桥电路驱动原理(经典)
H桥电路驱动原理 2009年04月08日 星期三 上午 08:43 H桥电路驱动原理 一、H桥驱动电路 图4.12中所示为一个典型的直流电机控制电路。电路得名于“H桥驱动电路”是因为它的形状酷似字母H。4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图4.12及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。 如图所示,H桥式电机驱动电路包括4个三极管和一个电机。要使电机运转,必须导通对角线上的一对三极管。根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。 图4.12 H桥驱动电路 要使电机运转,必须使对角线上的一对三极管导通。例如,如图4.13所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经 Q4回到电源负极。按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向 转动(电机周围的箭头指示为顺时针方向)。
图4.13 H桥电路驱动电机顺时针转动 图4.14所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。 图4.14 H桥驱动电机逆时针转动 二、使能控制和方向逻辑 驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。如果三极管Q1和Q2同时导通,那么电流就会从正极穿过两个三极管直接回到负极。此时,电 路中除了三极管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。基于上述原因,在实际驱动电路中通常 要用硬件电路方便地控制三极管的开关。 图4.155 所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制 整个电路的开关。而2个非门通过
Arduino 双H桥直流电机驱动板
从机器人基地淘宝店铺邮寄的Arduino 双H桥直流电机驱动板今天终于到了。 蓝色的板子,金色的印字,做工真的很精美,物有所值,吼吼~刚拿到的驱动板就来编写一个小程序测试一下吧,当务之急就是要了解一下这款驱动板接口说明和参数指南,这里我就“盗用”一下机器人基地的功能图解,敬请见谅啦!
可以看到板子左、右下角分别有两个直流电机控制信号输入接口,我这里准备了一个从玩具小车上拆下来的电机,我就选择左边的接口,将直流电机接入绿色端子,左下角的信号输入接口三个插针分别是EA、I1、I2,EA是区别于右边的EB,是用来接入PWM接口给电机调速的,I1、I2分别接入数字接口就OK了,是用来控制电机转向的。我就将EA接入Arduino的pin11PWM接口,I1、I2分别接8、9数字接口,至于逻辑供电部分,我就直接接入Arduino 板子上的5V输出接口了,这里也可以不接线,因为这款驱动板子是可以板内取电的,如需要板外取电需将控制板内取电的跳线帽取下(这里我只是为了给网友们演示外部取电的使用方法,我并没有取下板内取电的跳线帽,如图接
线实际上仍是板内取电。这里希望没有造成误导),端子左边的VMS接口是驱动部分取电,我接入四节5号电池,按下图连接好电路。
连接好电路就剩编程的工作了,我就让电机先顺时针转两秒,再逆时针转两秒,再让电机停止转动,这样循环进行。
程序如下: int pinI1=8;//定义I1接口 int pinI2=9;//定义I2接口 int speedpin=11;//定义EA(PWM调速)接口 void setup() { pinMode(pinI1,OUTPUT);//定义该接口为输出接口pinMode(pinI2,OUTPUT); pinMode(speedpin,OUTPUT); } void loop() { analogWrite(speedpin,100);//输入模拟值进行设定速度 delay(2000); digitalWrite(pinI1,LOW);//使直流电机顺时针转digitalWrite(pinI2,HIGH); analogWrite(speedpin,100); delay(2000); digitalWrite(pinI1,HIGH);//使直流电机逆时针转digitalWrite(pinI2,LOW);
直流电机H桥驱动方式
直流电机H桥驱动2013年08月01日
直流电机H 桥驱动方案 H桥原理简述 所谓H 桥驱动电路是为了直流电机而设计的一种常见电路,它主要实现直流电机的正反向驱动,其典型电路形式如下: 从图中可以看出,其形状类似于字母“H”,而作为负载的直流电机是像“桥”一样架在上面的,所以称之为“H 桥驱动”。4个开关所在位置就称为“桥臂”。
从电路中不难看出,假设开关A、D接通,电机为正向转动,则开关B、C接通时,直流电机将反向转动。从而实现了电机的正反向驱动。 借助这4 个开关还可以产生电机的另外2 个工作状态: A)刹车——将B 、D开关(或A、C)接通,则电机惯性转动产生的电势将被短路,形成阻碍运动的反电势,形成“刹车”作用。 B)惰行——4个开关全部断开,则电机惯性所产生的电势将无法形成电路,从而也就不会产生阻碍运动的反电势,电机将惯性转动较长时间。 以上只是从原理上描述了H 桥驱动,而实际应用中很少用开关构成桥臂,通常使用晶体管,因为控制更为方便,速度寿命都长于有接点的开关(继电器)。 细分下来,晶体管有双极性和MOS管之分,而集成电路只是将它们集成而已,其实质还是这两种晶体管,只是为了设计、使用方便、可靠而做成了一块电路。 双极性晶体管构成的H 桥:
MOS管构成的H 桥: 以下就分析一下这些电路的性能差异。
典型H 桥驱动电路分析 分析之前,首先要确定H 桥要关注那些性能: A)效率——所谓驱动效率高,就是要将输入的能量尽量多的输出给负载,而驱动电路本身最好不消耗或少消耗能量,具体到H 桥上,也就是4个桥臂在导通时最好没有压降,越小越好。 B)安全性——不能同侧桥臂同时导通; C)电压——能够承受的驱动电压; D)电流——能够通过的驱动电流。 大致如此,仔细考量,指标B)似乎不是H桥本身的问题,而是控制部分要考虑的。 而后两个指标通过选择合适参数的器件就可以达到,只要不是那些特别大的负载需求,每种器件通常都能选择到。而且,小车应用中所能遇到的电流、电压更是有限。 只有指标A)是由不同器件的性能所决定的,而且是运行中最应该关注的指标,因为它直接影响了电机驱动的效率。 所以,经分析的重点放在效率上,也就是桥臂的压降上。 为了使分析简单,便于比较,将H 桥的驱动电流定位在2A 水平上,而电压在5 - 12V 之间。 选择三个我所涉及到的器件: A)双极性晶体管—— D772、D882 B)MOS管—— 2301、2302 C)集成电路H桥—— L298
基于H桥控制直流电机驱动电路设计
基于H桥控制直流电机驱动电路设计 林海滨※张镐 (厦门蒙发利电子有限公司,福建厦门361100) 摘要:基于H桥控制技术设计了1款用于直流电机的驱动电路,该电路自带开路和短路保护功能。系统由MCU信号生成电路、光电隔离电路、电机逻辑驱动电路、H桥功率驱动电路、电流采样电路、滤波检波电路、线性放大隔离电路等五部分组成。电机逻辑驱动电路是核心部分,其主要由单片机时序控制、信号缓冲处理、光电隔离电路、滤波电路等组成;H桥功率驱动电路,由4个MOS管组成,上下桥臂分别用2个P沟道功率MOS管和2个N沟道功率MOS管。通过对逻辑电路时序的巧妙控制,遏制了H桥驱动的直通现象,无需增加死区的控制电路。系统最大的特点是结构简单,可靠性强,且输出功率优于IC驱动,易形成性价比高的方案。 关键词:H桥;,PWM;直流电机;驱动;逻辑控制 DC Motor Driver Design Base on the H-bridge Controlled LIN Haibin ZHANGHao (XIAMEN COMFORT SCIENCE & TECHNOLOGY GROUP) Abstract:Based on the h-bridge control technology, a driver circuit for dc motor is designed. The circuit has the function of open circuit and short circuit protection. System consists of MCU signal generated logic circuit, photoelectric isolation circuit, motor drive circuit, H bridge power drive circuit, current sampling circuit, filter detection circuit, linear amplification of isolating circuit and so on five parts. The motor logic drive circuit is the core part, which consists of single chip computer time series control, signal buffer processing, optoelectronic isolation circuit and filter circuit. H bridge power drive circuit consists of four MOS tubes, with two P channel power MOS tubes and two n-channel power MOS tubes respectively. By controlling the sequence of logic circuits, the direct current of h-bridge is restrained, and the control circuit of the dead zone is not required. The system is characterized by simple structure, strong reliability and better output power than IC drive. Key words: H bridge; PWM; Dc motor; Drive; Logic control 0 引言 直流电机具有良好的线性特性、优异的控制性能等特点,成为大多数变速运动控制和闭环位置伺服控制系统的最佳选择。为适应小型直流电机的使用需求,各半导体厂商推出了直流电机控制专用集成电路,构成基于微处理器控制的直流电机伺服系统。但是,专用集成电路构成的直流电机驱动器的输出功率有限,不适合大功率直流电机驱动需求。因此采用分立元件构建H桥,实现大功率直流电机驱动控制。该驱动电路能够满足各种类型直流电机需求,并具有快速、精确、高效、低功耗等特点,可直接与微处理器接口,应用于PWM技术实现直流电机调速控制[1]。 1 电路工作原理分析 1.1电路原理设计框图 电路总体设计框图如图1所示,包括MCU信号生成电路、光电隔离电路、电机逻辑驱动 ※作者简介:林海滨(1986—),男,福建泉州人,研究方向:电力电子技术、电源技术、马达驱动,Email:linhaibin896@https://www.360docs.net/doc/ec1037143.html,
直流电机(H桥)驱动电路
直流电机(H桥)驱动电路 图4.12中所示为一个典型的直流电机控制电路。电路得名于“H桥驱动电路”是因为它的形状酷似字母 H。4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图4.12及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。 如图所示,H桥式电机驱动电路包括4个三极管和一个电机。要使电机运转,必须导通对角线上的一对三极管。 根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。 图4.12 H桥驱动电路 要使电机运转,必须使对角线上的一对三极管导通。例如,如图4.13所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经 Q4回到电源负极。按图中电流箭头所示,该流向的电 流将驱动电机顺时针转动。当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。
图4.13 H桥电路驱动电机顺时针转动 图4.14所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。 图4.14 H桥驱动电机逆时针转动 驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。如果三极管Q1和Q2同时导通,那么电流就会从正极穿过两个三极管直接回到负极。此时,电路中除了三极管外没有其他任何负载,因此电路
上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。基于上述原因,在实际驱动电 路中通常要用硬件电路方便地控制三极管的开关。 图4.155 所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制整个电路的开关。而2个非门通过提供一种方向输人,可以保证任何时候在H桥的同侧腿上都只有一个三极管能导通。(与本节前面的示意图一样,图4.15所示也不是一个完整的电路图,特别是图中与门和三极管直接连接是不能正常工作的。) 图4.15 具有使能控制和方向逻辑的H桥电路 采用以上方法,电机的运转就只需要用三个信号控制:两个方向信号和一个使能信号。如果DIR-L信号为0,DIR-R信号为1,并且使能信号是1,那么三极管Q1和Q4导通,电流从左至右流经电机(如图4.16所示);如果DIR-L信号变为1,而DIR-R信号变为0,那么Q2和Q3将导通,电流则反向流过电机。 图4.16 使能信号与方向信号的使用
24V直流电机H桥驱动电路及51单片机C程序
24V直流电机H桥驱动电路及51单片机C程序
24V直流电机H桥驱动电路及51单片机C程序 一、原理图 特别说明:CCP0、CCP1 = 00时,电机停止;为01时,电机正转,为10时,电机反转;11是绝对不允许的,为防止H桥共态导通,调试时需要特别注意!!! 二、程序代码 #include
status_initial(); PWM_initial(); while(1) { key_scan(); M_run(); } } void status_initial(void) { /* CCAP0H = 0XFF; CCAP0L = 0XFF;//占空比为0% CCAP1H = 0XFF; CCAP1L = 0XFF;//占空比为0% */ run_flag = 0; direction_flag = 0; count = 0;//----------------给定一个初始值,设定电机开机的初始转速???或者按下启动,up启动加速
P1 = 0x00;//灯灭 } void PWM_initial(void) { CCON = 0X00; CMOD = 0X02; //空闲模式下PCA计数器继续工作,使用系统时钟,禁止CCON的CF位中断CCAPM0 = 0X42; //0100 0010 允许比较器功能,允许CCP0脚用作脉宽调节输出 CCAPM1 = 0X42; // 同上,8位PWM,无中断 CCAP0H = 0XFF; //PCA捕捉/比较寄存器--低八位和高八位------频率f = SYSclk/256 CCAP0L = 0XFF; //工作于PWM模式,用于控制输出的占空比 CCAP1H = 0XFF; //当寄存器CL的值小于[EPCnL,CCAPnL]时,输出为低;当寄存器CL的值等于或大于【EPCnL,CCAPnL】时,输出为高; CCAP1L = 0XFF; //当CL的值有FF变为00溢出时,[EPCnH,CCAPnH]的内容装载到[EPCnL,
H桥驱动选择
一、背景 此问题一直想留给做小车的同学去研讨,期望他们在制作过程中能够悟出其中的道理。可无奈等至今日也未见一文半字 : ( 却接到了无数的质询:你为何要用分立元件构建 H 桥驱动?为何不选择 L298 集成电路桥?为何要使用 MOS 管?等等……,逐个回复太累了,只好整理一下,汇总于此,供参考,有不妥之处望指正,更望能有人提出进一步的分析。 二、分析内容界定 本文只涉及有刷直流电机 H 桥驱动部分的电路,不讨论如何控制 H 桥?如何实现 PWM?以及如何实现过流保护等;而且主要讨论构成 H 桥 4 个桥臂对性能的影响。 三、H桥原理简述 所谓 H 桥驱动电路是为了直流电机而设计的一种常见电路,它主要实现直流电机的正反向驱动,其典型电路形式如下:
从图中可以看出,其形状类似于字母“H”,而作为负载的直流电机是像“桥”一样架在上面的,所以称之为“ H 桥驱动”。4个开关所在位置就称为“桥臂”。 从电路中不难看出,假设开关 A、D接通,电机为正向转动,则开关B、C接通时,直流电机将反向转动。从而实现了电机的正反向驱动。 借助这 4 个开关还可以产生电机的另外 2 个工作状态: A)刹车——将B 、D开关(或A、C)接通,则电机惯性转动产生的电势将被短路,形成阻碍运动的反电势,形成“刹车”作用。 B)惰行—— 4个开关全部断开,则电机惯性所产生的电势将无法形成电路,从而也就不会产生阻碍运动的反电势,电机将惯性转动较长时间。 以上只是从原理上描述了H 桥驱动,而实际应用中很少用开关构成桥臂,通常使用晶体管,因为控制更为方便,速度寿命都长于有接点的开关(继电器)。 细分下来,晶体管有双极性和MOS管之分,而集成电路只是将它们集成而已,其实质还是这两种晶体管,只是为了设计、使用方便、可靠而做成了一块电路。
关于直流电机H桥驱动方案的选择
关于直流电机H 桥驱动方案的选择 一、背景 此问题一直想留给做小车的同学去研讨,期望他们在制作过程中能够悟出其中的道理。可无奈等至今日也未见一文半字,却接到了无数的质询:你为何要用分立元件构建H 桥驱动?为何不选择L298 集成电路桥?为何要使用MOS 管?等等……逐个回复太累了,只好整理一下,汇总于此,供参考,有不妥之处望指正,更望能有人提出进一步的分析。 二、分析内容界定 本文只涉及有刷直流电机H 桥驱动部分的电路,不讨论如何控制H 桥?如何实现PWM?以及如何实现过流保护等;而且主要讨论构成H 桥 4 个桥臂对性能的影响。 三、H桥原理简述 所谓H 桥驱动电路是为了直流电机而设计的一种常见电路,它主要实现直流电机的正反向驱动,其典型电路形式如下: 从图中可以看出,其形状类似于字母“H”,而作为负载的直流电机是像“桥”一样架在上面的,所以称之为“ H 桥驱动”。4个开关所在位置就称为“桥臂”。 从电路中不难看出,假设开关A、D接通,电机为正向转动,则开关B、C接通时,直流电机将反向转动。从而实现了电机的正反向驱动。 借助这 4 个开关还可以产生电机的另外2 个工作状态: A)刹车——将B 、D开关(或A、C)接通,则电机惯性转动产生的电势将被短路,形成阻碍运动的反电势,形成“刹车”作用。
B)惰行——4个开关全部断开,则电机惯性所产生的电势将无法形成电路,从而也就不会产生阻碍运动的反电势,电机将惯性转动较长时间。 以上只是从原理上描述了H 桥驱动,而实际应用中很少用开关构成桥臂,通常使用晶体管,因为控制更为方便,速度寿命都长于有接点的开关(继电器)。 细分下来,晶体管有双极性和MOS管之分,而集成电路只是将它们集成而已,其实质还是这两种晶体管,只是为了设计、使用方便、可靠而做成了一块电路。 双极性晶体管构成的H 桥: MOS管构成的H 桥:
直流电机H桥驱动方式
睡神耗子文档直流电机H桥驱动 2013年08月01日
基本信息 修改历史
目录 资料来源 (1) 详细资料.......................................................... 错误!未定义书签。附录 (15)
资料来源
直流电机H 桥驱动方案 背景 此问题一直想留给做小车的同学去研讨,期望他们在制作过程中能够悟出其中的道理。可无奈等至今日也未见一文半字: ( 却接到了无数的质询:你为何要用分立元件构建H 桥驱动?为何不选择L298 集成电路桥?为何要使用MOS 管?等等……,逐个回复太累了,只好整理一下,汇总于此,供参考,有不妥之处望指正,更望能有人提出进一步的分析。 分析内容界定 本文只涉及有刷直流电机H 桥驱动部分的电路,不讨论如何控制H 桥?如何实现PWM?以及如何实现过流保护等;而且主要讨论构成H 桥4 个桥臂对性能的影响。 H桥原理简述 所谓H 桥驱动电路是为了直流电机而设计的一种常见电路,它主要实现直流电机的正反向驱动,其典型电路形式如下:
从图中可以看出,其形状类似于字母“H”,而作为负载的直流电机是像“桥”一样架在上面的,所以称之为“H 桥驱动”。4个开关所在位置就称为“桥臂”。 从电路中不难看出,假设开关A、D接通,电机为正向转动,则开关B、C接通时,直流电机将反向转动。从而实现了电机的正反向驱动。 借助这4 个开关还可以产生电机的另外2 个工作状态: A)刹车——将B 、D开关(或A、C)接通,则电机惯性转动产生的电势将被短路,形成阻碍运动的反电势,形成“刹车”作用。
H桥电路原理图
H 桥电路原理及直流电机驱动编程 标签: h 桥电路原理 分类: MCS-51单片机 上图中所示为一个典型的直流电机控制电路。电路得名于“H 桥驱动电路”是因为它的形状酷似字母H 。4个三极管组成H 的4条垂直腿,而电机就是H 中的横杠(注意:图只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。
H桥式电机驱动电路包括4个三极管和一个电机。要使电机运转,必须导通对角线上的一对三极管。根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。 要使电机运转,必须使对角线上的一对三极管导通。例如,如下图所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。 上图所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。
典型的H桥驱动电路如下: PWM1为1,PWM2为1时,Q1和Q2导通,节点1和2都是低电平,Q15和Q16导通,电机不工作 PWM1为0,PWM2为0时,Q1和Q2不导通,节点1和2都是高电平,Q13和Q14导通,电机不工作 PWM1为1,PWM2为0时,Q1导通而Q2不导通,节点1是低电平而2是高电平,Q14和Q15导通,电机逆时针旋转 PWM1为0,PWM2为1时,Q1不导通而Q2导通,节点1是高电平而2是低电平,Q13和Q16导通,电机顺时针旋转
直流电机H桥驱动电路
直流电机H桥驱动电路 H桥功率驱动电路可应用于步进电机、交流电机及直流电机等的驱动。一、H桥驱动电路 所谓H 桥驱动电路是为直流电机而设计的一种常见电路,它主要实现直流电机的正反向驱动,其典型电路形式如下: 从图中可以看出,其形状类似于字母“H”,而作为负载的直流电机是像“桥”一样架在上面的,所以称之为“H 桥驱动”。4个开关所在位置就称为“桥臂”。 从电路中不难看出,假设开关A、D接通,电机为正向转动,则开关B、C 接通时,直流电机将反向转动。从而实现了电机的正反向驱动。借助这4个开关还可以产生电机的另外2个工作状态: A)刹车——将B 、D开关(或A、C)接通,则电机惯性转动产生的电势将被短路,形成阻碍运动的反电势,形成“刹车”作用。 B)惰行—— 4个开关全部断开,则电机惯性所产生的电势将无法形成电路,从而也就不会产生阻碍运动的反电势,电机将惯性转动较长时间。 以上只是从原理上描述了H桥驱动,而实际应用中很少用开关构成桥臂,通常使用晶体管,因为控制更为方便,速度寿命都长于有接点的开关(继电器)。 细分下来,晶体管有双极性和MOS管之分,而集成电路(例如L298)只是将它们集成而已,其实质还是这两种晶体管,只是为了设计、使用方便、可靠而做成了一块电路。 双极性晶体管构成的H 桥:
MOS管构成的H 桥: 二、使能控制和方向逻辑 驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。如果 三极管TA和TB同时导通,那么电流就会从正极穿过两个三极管直接回到负极。
此时,电路中除了三极管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。基于上述原因,在实际驱动电路中通常要用硬件电路方便地控制三极管的开关。 图4.15所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制整个电路的开关。而2个非门通过提供一种方向输人,可以保证任何时候在H桥的同侧腿上都只有一个三极管能导通。(图4.15所示不是一个完整的电路图。) 图4.15 具有使能控制和方向逻辑的H桥电路 采用以上方法,电机的运转就只需要用三个信号控制:两个方向信号和一个使能信号。如果DIR-L信号为0,DIR-R信号为1,并且使能信号是1,那么三极管Q1和Q4导通,电流从左至右流经电机(如图4.16所示);如果DIR-L 信号变为1,而DIR-R信号变为0,那么Q2和Q3将导通,电流则反向流过电机。 图4.16 使能信号与方向信号的使用 实际使用的时候,用分立元件制作H桥是很麻烦的,现在市面上有很多封装好的H桥集成电路,接上电源、电机和控制信号就可以使用了,在额定的电压和电流内使用非常方便可靠。比如常用的L293D、L298N、TA7257P、SN754410等。
H桥驱动电路
一、直流电机的结构和控制原理 1、直流电机的工作原理概述: 在电力拖动领域,随着变频器的出现形成交流调速技术的日渐成熟和低成本化,在不断侵蚀着直流调速的“地盘”,但直到今天,直流调速仍固守着日渐缩小的“阵地”。 直流电机具有调速性能好、调速方便平滑,调速装置简单、调范围广等特点,能承受频繁冲击负载、过载能力强(由变频器和交流电机构成的交流调速系统,还有一定差距),能实现频繁速启、制动及逆向旋转,能满足各种机械负载的特性要求。直流电机的最大缺点,是因碳刷换向器的滑动电接触方式和整体结构交流电动机更为复杂等原因造成的维护工作量较大,需定期更换碳刷等。 直流电机的结构比交流电动机复杂得多,主要由: 1)主磁极。由主磁极铁芯及套装在铁芯上的励磁线圈构成,作用是建立主磁场; 2)机座。为主磁路的一部分,同时构成电机的结构框架,由厚钢板或铸钢件构成; 3)电枢铁芯。为电枢绕组的支撑部件,也为主磁路的一部分,由硅钢片叠压而成; 4)电枢绕组。直流电机的电路部分,由绝缘的圆形或矩形截面的导线绕成;
5)换向器。由许多鸽形尾的换向片排列成一个圆筒、片间用V形云母绝缘,两端再用两个形环夹紧而构成。用作直流发电机时,称整流子,起整流作用;用于直流电动机时,用于(逆变)换向; 6)电刷装置。由电刷、刷盒、刷杆和连线等构成,是电枢电路的引出(或引入)装置。 7)换向极。由铁芯和绕组构成,起改善换向,气隙磁场匀称等作用。 直流电机是将电源电能转变为轴上输出的机械能的电磁转换装置。由定子绕组通入直流励磁电流,产生励磁磁场,主电路引入直流电源,经碳刷(电刷)传给换向器,再经换向器将此直流电转化为交流电,引入电枢绕组,产生电枢电流(电枢磁场),电枢磁场与励磁磁场合成气隙磁场,电枢绕组切割合成气隙磁场,产生电磁转矩。这是直流电机的基本工作原理。 上图为简单的两极直流电机模型,由主磁极(励磁线圈)、电枢(电枢线圈)、电刷和换向片等组成。固定部分(定子)上,装设了一对直流励磁的静止的主磁级N、S,主磁级由励磁线圈的磁场产生;旋转部分(转子)上,装调电枢铁芯与电枢绕组。电枢电流由外供直流电源所产生。定子和转子之间有一气隙。电枢线圈的首、末端分别连接于两个圆弧型的换向片上,换向片之间互相绝缘,由换向片构成的整体称为换向器。换向片固定在转轴上,与转轴也是绝缘的。在换向片上放置着一对固定不动的电刷B1、B2,当电枢旋转时,电枢线圈通过换向片和电刷与外电路接触(引入外供直流电源)。 因为主磁极的磁场方向是固定不变的(由接入励磁电源极性所决定),要使电枢受到一个方向不变的电磁转矩,关键在于:当线圈边在不同极性的磁极下,如何将流过线圈中的电流方向极时地加以变换,即进行所谓“换向”,线圈中的电流所随所处磁极极性的改变同时改变其方向,以确保线圈在不同磁极下的电流保持一个方向,从而使电磁转矩的方向始终保持不变。 一台直流电机原则上既可以作为电动机运行,也可以作为发电机运行。这种原理在电机理论中被称为可逆原理。当转轴为原动机所拖动,电机绕组中产生交流电势,经电刷输出至外部负载电路,此时的换向器(换向器另一名称又叫整流子),
直流电机H桥驱动原理和驱动电路选择L9110 L298N LMD18200
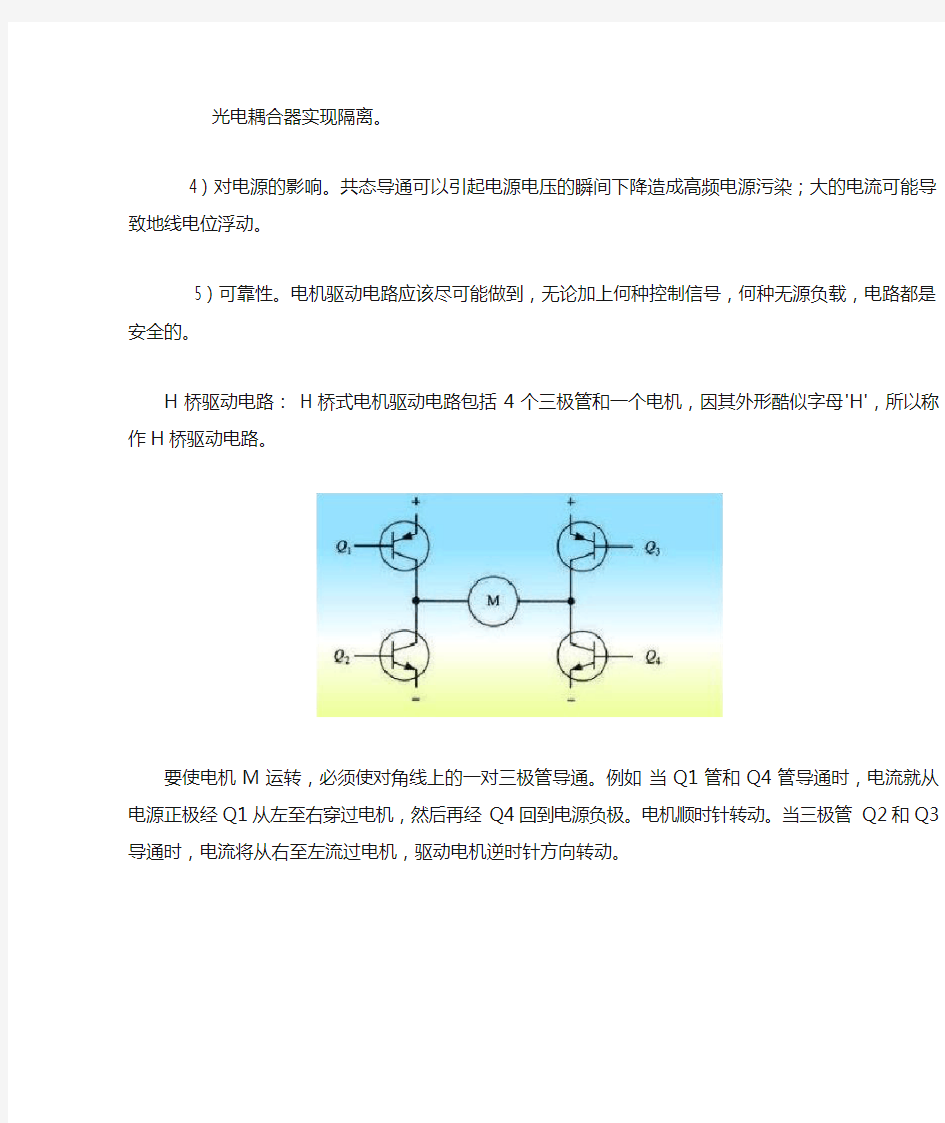
直流电机H桥驱动原理和驱动电路选择 L9110 L298N LMD18200 2011-09-15 8:44 在直流电机驱动电路的设计中,主要考虑一下几点: 1.功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机 即可,当电机需要双向转动时,可以使用由4 个功率元件组成的H 桥电路或者使用一个双刀双掷的继电器。如果不需要调速,只要使 用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。 2.性能:对于PWM 调速的电机驱动电路,主要有以下性能指标。 1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。 2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防 止共态导通(H 桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3)对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或 光电耦合器实现隔离。 4)对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5)可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 H桥驱动电路: H桥式电机驱动电路包括4个三极管和一个电机,因其外形酷似字母'H',所以称作H桥驱动电路。
要使电机M运转,必须使对角线上的一对三极管导通。例如当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。电机顺时针转动。当三极管Q2和Q3导通时,电流将从右至左流过电机,驱动电机逆时针方向转动。 完整的晶体管H桥驱动电路,PWM1,PWM2,为电机方向控制输入端,PWM1=1,PWM2=0时正转,PWM=0,PWM2=1时电机反转。 PWM1,PWM2同时也是电机调速的脉宽输入端。
直流电机驱动h桥
一、H桥驱动电路 图4.12中所示为一个典型的直流电机控制电路。电路得名于“H桥驱动电路”是因为它的形状酷似字母H。4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图4.12及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。 如图所示,H桥式电机驱动电路包括4个三极管和一个电机。要使电机运转,必须导通对角线上的一对三极管。根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。 图4.12 H桥驱动电路 要使电机运转,必须使对角线上的一对三极管导通。例如,如图4.13所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。 图4.13 H桥电路驱动电机顺时针转动
图4.14所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。 图4.14 H桥驱动电机逆时针转动 二、使能控制和方向逻辑 驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。如果三极管Q1和Q2同时导通,那么电流就会从正极穿过两个三极管直接回到负极。此时,电路中除了三极管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。基于上述原因,在实际驱动电路中通常要用硬件电路方便地控制三极管的开关。 图4.155 所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制整个电路的开关。而2个非门通过提供一种方向输人,可以保证任何时候在H桥的同侧腿上都只有一个三极管能导通。(与本节前面的示意图一样,图4.15所示也不是一个完整的电路图,特别是图中与门和三极管直接连接是不能正常工作的。) 图4.15 具有使能控制和方向逻辑的H桥电路
H桥功率驱动电路
H桥功率驱动电路可应用于步进电机、交流电机及直流电机等的驱动.永磁步进电机或混合式步进电机的励磁绕组都必须用双极性电源供电,也就是说绕组有时需正向电流,有时需反向电流,这样绕组电源需用H桥驱动.本文以两相混合式步进电机驱动器为例来设计H桥驱动电路. 1 电路原理 图1给出了H桥驱动电路与步进电机AB相绕组连接的电路框图. 4个开关K1和K4,K2和K3分别受控制信号a,b的控制,当控制信号使开关K1,K4合上,K2,K3断开时,电流在线圈中的流向如图1(a),当控制信号使开关K2,K3合上,K1,K4断开时,电流在线圈中的流向如图1(b)所示.4个二极管VD1,VD2,VD3,VD4为续流二极管,它们所起的作用是:以图1(a)为例,当K1,K4开关受控制由闭合转向断开时,由于此时线圈绕组AB上的电流不能突变,仍需按原电流方向流动(即A→B),此时由VD3,VD2来提供回路.因此,电流在K1,K4关断的瞬间由地→VD3→线圈绕组AB→VD2→电源+Vs形成续流回路.同理, 在图1(b)中,当开关K2,K3关断的瞬间,由二极管VD4,VD1提供线圈绕组的续流,电流回路为地→VD4→线圈绕组BA→VD1→电源+Vs.步进电机驱动器中,实现上述开关功能的元件在实际电路中常采用功率MOSFET管. 由步进电机H桥驱动电路原理可知,电流在绕组中流动是两个完全相反的方向.推动级的信号逻辑应使对角线晶体管不能同时导通,以免造成高低压管的直通. 另外,步进电机的绕组是感性负载,在通电时,随着电机运行频率的升高,而过渡的时间常不变,使得绕组电流还没来得及达到稳态值又被切断,平均电流变小,输出力矩下降,当驱动频率高到一定的时候将产生堵转或失步现象.因此,步进电机的驱动除了电机的设计尽量地减少绕组电感量外,还要对驱动电源采取措施,也就是提高导通相电流的前后沿陡度以提高电机运行的性能. 步进电机的缺陷是高频出力不足,低频振荡,步进电机的性能除电机自身固有的性能外,驱动器的驱动电源也直接影响电机的特性.要想改善步进电机的频率特性,就必须提高电源电压. 2 电路设计 图2给出了驱动器AB相线圈功率驱动部分原理图.
293直流电机驱动模块
直流电机驱动模块 使用说明书 尊敬的客户: 您好!感谢您选用本店的电机驱动模块,为了更快更好的使用本产品, 请您仔细的阅读本使用说明书。 特点:加入多级驱动,超高输入阻抗,对输入信号没有驱动要求,适合各类I/O口,可驱动本店所有电机。
一.电机驱动模块简介 中小电流直流电机专用驱动器,所用芯片l293属于H桥集成电路,其输出电流为1000mA,最高电流2A,最高工作电压36V,可以驱动感性负载,比如:小型直流电机,继电器、步进电机和开关电源晶体管,特别是其输入端可以与单片机直接相联,从而很方便地受单片机控制。当驱动小型直流电机时,可以直接控制两路电机,并可以实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。 本模块具有体积小,控制方便的特点。采用此模块定会使您的电机控制自如,应对小车题目轻松自如。 二.驱动模块指示图 1、电源指示灯:上电后灯亮表示供电正常。 2、电机电源的大功率输入端子:电机电源的输入端子,靠近LED的一端为GND,另一端为VCC,此端子和下面的端子电气上是连接的,但该电源端子能够承受大电流,当工作电流较大时选用,并方便裸线接入; 3、电机电压输入:当工作电流较小时选用,标准插针,可配合杜邦线使用(此种接口可长时间安全通过2A以下电流);
4、5V逻辑电源:+5V电源输入,给板内逻辑系统供电,本驱动器不含稳压IC,此处一定要接5V电源,电压过大可能会损坏板子或误动作,逻辑电源可和电机电源共用一组5伏电源,此为单电源供电方式,用于控制5伏左右的电机或其他设备。 5、地:电源负极; 6、M2方向控制:接单片机的一个I/O口,接1时正转,接0时反转(所谓的正反是相对的,不是绝对的); 汇编指令示例:SETB P1.0CLR P1.0 7、M2速度控制:接PWM脉冲信号,最高频率≥100K,支持100% PWM信号(可直接用高低电平控制); 8、M1方向控制:接单片机的一个I/O口,接1时正转,接0时反转; 9、M1速度控制:接单片机的PWM脉冲信号,最高频率≥100K; 10、M1的输出插针:第一路电机小功率输出(适合小电流输出,标准插针,可配合杜邦线); 11、M1的输出端子:大功率的第一路电机的输出; 12、M2的输出插针:简易的第二路电机的输出(适合小电流输出,标准插针,可配合杜邦线); 13、M2的输出端子:功率的第二路电机的输出。