ansys加载与求解
加载与求解
施加载荷是有限元分析中关键的一步,可以对网格划分之后的有限元模型施加载荷,也可以直接对实体模型施加载荷。当对模型进行了划分网格和施加载荷之后,就可以选择适当的求解器对问题进行求解。
第一节基础知识
一、载荷的分类
ANSYS中载荷(Loads)包括边界条件和模型内部或外部的作用力。在不同的学科中,载荷的定义如下。
①结构分析:位移、力、压力、弯矩、温度和重力。
②热分析:温度、热流率、对流、内部热生成、无限远面。
③磁场分析:磁势、磁流通、磁电流段、源电密度、无限远面。
④电场分析;电势(电压)、电流、电荷、电荷密度、无限远面。
⑤流场分析:速度、压力。
在ANSYS中,载荷主要分为六大类:DOF约束(自由度约束)、力(集中载荷)、表面载荷、体载荷、惯性力及耦合场载荷,它们的含义为如下。
①DOF约束(DOF constraint):用户指定某个自由度为已知值。在结构分析中约束是位移和对称边界条件:在热力学分析中约束是温度和热流量等。
②力(集中载荷)(Fome):施加于模型节点的集中载荷。如结构分析中的力和力矩,热分析中的热流率。
③⑧表面载荷(SurfaceLoad):作用在某个表面上的分布载荷。如结构分析中的压力,热分析中的对流和热流量。
④体载荷(Body loads):作用在体积或场域内。如结构分析中的温度和重力,热分析中的热生成率。
⑤惯性载荷(Inertia loads):结构质量或惯性引起的载荷。如重力加速度、角速度和角加速度,主要在结构分析中使用。
⑥耦合场载荷(Coupled-field loads):它是一种特殊的情况,从一种分析中得到的结果用作另一种分析的载荷;如热分析中得到的节点温度可作为结构分析中的体载荷施加到每一个节点。
二、载荷步、子步和平衡迭代
1.载荷步
载荷步是指分步施加的载荷,在线性静态或稳态分析中,可以使用不同的载荷步施加不第82页
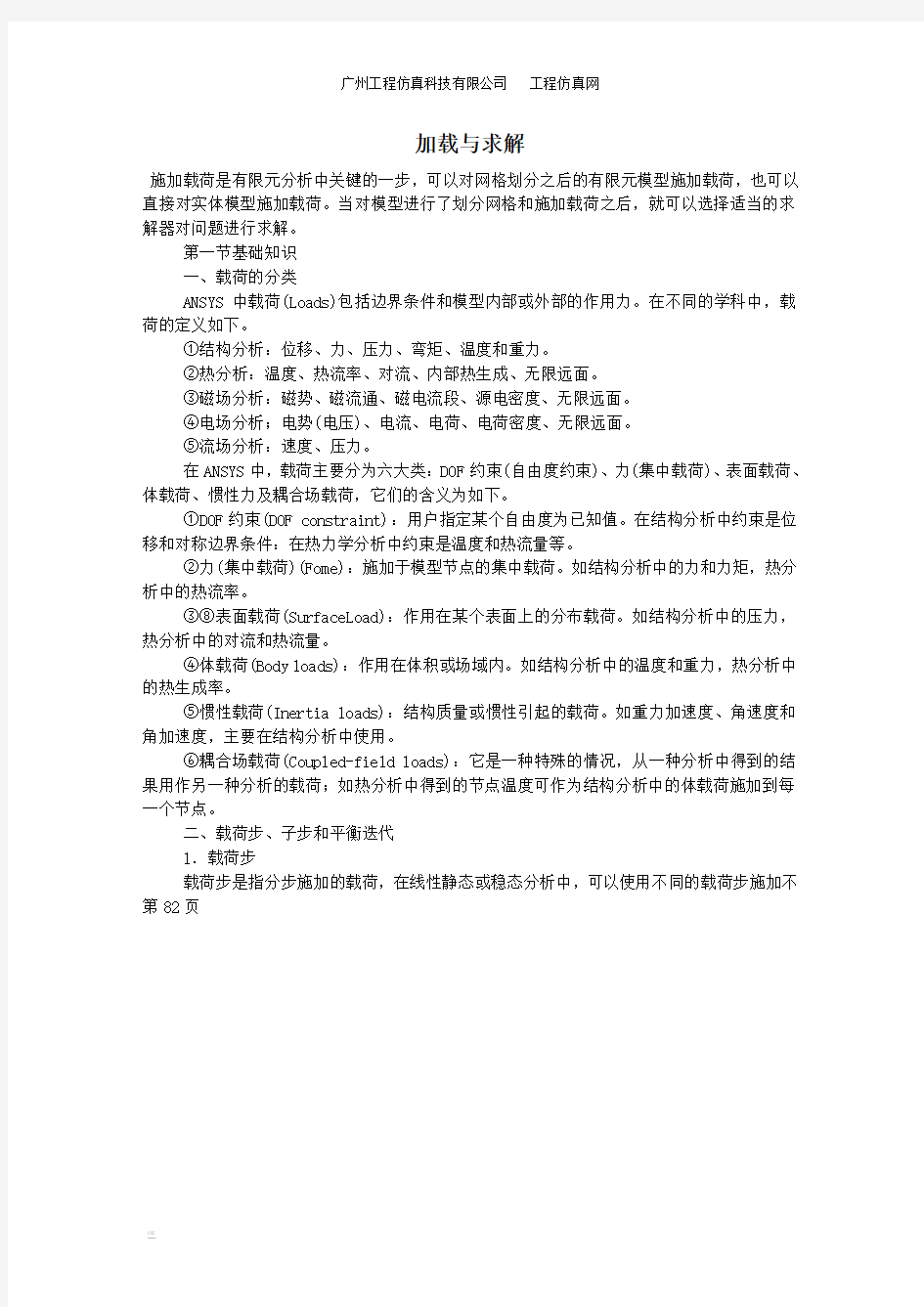
同的载荷组合。如图5—1所示,第一个载荷步用于线性载荷,第二个载荷步用于常数载荷部分,第二个载荷步用于卸载。
2.子步
子步是指在一个特定的载荷步中每一次增加的步长,也称为时间步,代表一段时间。对于不同的分析类型,子步的作用不同:
①在非线性静态分析或稳态分析中,使用子步逐渐施加载荷以便能获得精确解。
②在线性或非线性瞬态分析或稳态分析中,使用于步满足瞬态时间积分法则(为获得精确解,通常规定一个最小的时间步长)。
③在谐波分析中,使用于步可获得谐波频率范围内多个频率处的解。
3.阶跃载荷和坡度载荷
在一个载荷步中,有两个或者两个以上的载荷步子步时,就必须选择所施加的载荷应该为阶跃载荷还是为坡度载荷。所谓阶跃载荷,就是指在第一个子步全部施加上去了,载荷在以后的每个子步中保持不变。坡度载荷就是指在每一个载荷步子步,载荷值都是递增的,直到最后一个载荷步子步,全部的载荷才施加上去。
4.平衡迭代
平衡迭代是指在给定子步下为了收敛而计算的附加解。平衡迭代仅应用于收敛起着很重要作用的非线性分析(静态或瞬态)中的迭代修正。
三、通用选项
通用选项包括瞬态或者静态分析当中载荷步结束的时间、子步步数或者说时间步大小、阶跃载荷、热应力当中的参考温度。选择Main Menu>Solution>Load Step Opts命令展开载荷步选项菜单。选择Main Menu>Solution>Load Step Opts>Time/Frequent>Time-Time Step命令,弹出如图5-2所示的对话框。
注意:如果展开的载荷步选项菜单不完全,选择Main Menu>Solution>Unabridgad Menu命令即可.
TIME命令在与速率有关的问题当中是指实际的时间,要求指定一个时间值;在与速率无关的问题里面,时间是一个用作跟踪载荷的参数。显然,无论哪一种情况,都不能将时间设置为0。
DELTIM命令是给ANSYS程序分析指定时间步的大小,在通用选项的另外一个窗口Time and Substep Options当中,ANSYS程序是要通过NSUBST命令来指定分析过程当中的子步的大小。
KBC命令是指定载荷的施加是采用阶跃式还是采用坡度式(线性方式)。
概述
·迄今为止, 我们已经知道了如何施加以下类型的载荷:
–位移(DOF 约束)
–压力和对流载荷(表面载荷)
–重力(惯性载荷)
–“结构”温度(体载荷)
这些载荷占了五种载荷类型中的4种。本文将讲述剩下的一种载荷—集中载荷, 比如应力分析中的节点载荷。
·将就以下问题进行讨论:
A. 集中载荷
B. 节点坐标
C. 求解器
D. 多重载荷步
A. 力载荷
·一个力就是可以在一个节点或关键点处施加的集中载荷(也可以叫“点载荷”)
·和力一样,点载荷适合于线状模型,如梁,桁架,弹簧等。
在实体单元或壳单元中, 点载荷往往引起应力奇异,但当您忽略了附近的应力时,它仍然是可接受的。记住,您可以通过选择来忽略附近施加了点载荷的单元。
·在左下角展示的二维实体单元中,我们注意到在加力位置出现最大应力SMAX (23,854)。
当在力附近的节点和单元不被选中时,SMAX (12,755)就会移到底部角点处,这是由于在该角点处约束引起的另一处应力奇异。
通过不选底部角点附近的节点和单元,您就可以在上孔附近得到预期的应力SMAX (8,098)。
注意,对于轴对称模型:
·在全部360°范围内输入力的值。
·同样在全部360°范围内输出力的值(反力)。
·例如, 设想一个半径为r的圆柱形壳体边缘施加有P lb/in 的载荷。把这个载荷施加在二维轴对称壳体模形上(比如SHELL51单元), 您就要施加一2πrP的力。
·施加一个力需要有以下信息:
–节点号(您可以通过施取确定)
–力的大小(单位应与您正在使用的单位系统保持一致)
–力的方向—FX, FY, 或FZ
使用:
–Solution > -Loads-Apply > Force/Moment
–或命令FK或F
·问题:在哪一个坐标系中FX, FY, 和FZ 有说明?
B.节点坐标系
·所有的力,位移,和其它与方向有关的节点量都可以在节点坐标中说明。
–输入量:
·力和力矩FX, FY, FZ, MX, MY, MZ
·位移约束UX, UY, UZ, ROTX, ROTY, ROTZ
·耦合和约束方程
·其它
–输出量:
·计算出的位移UX, UY, UZ, ROTX, ROTY, ROTZ
·反力FX, FY, FZ, MX, MY, MZ
·其它
·节点坐标系和模型中的每个节点有关。
·缺省时, 节点坐标系与总体笛卡尔坐标系一致,例如,所有施加的力和位移约束缺省时都是在笛卡尔坐标中。
·必要时,您可以转换节点坐标的方向。
例如:
–模拟一个斜的滚动支座。
–施加径向力.
–施加径向约束(比如模拟一个承受压力的刚性销)。
·旋转节点坐标分为四步:
1.选择需要旋转的节点。
2.激活您要旋转的节点所在的坐标系(或者生成一个局部坐标系)例如:CSYS,1。
3.选择Preprocessor > Move/Modify > -Rotate Node CS-To Active CS, 然后在拾取
器中按[Pick All]或者使用NROTAT,ALL命令。
4.激活所有节点。
·注意: 当您在反对称边界条件下施加对称约束时,ANSYS 自动旋转边界上的所有节点。
·演示:
–恢复rib.db文件。
–把工作平面移至底圆圆心处(使用关键点的中间位置)。
–在工作平面上激活柱坐标系(或建立一个局部坐标系)。
–选择半径在r = 0.35 上的点并画出它们。
–在当前激活的坐标系中旋转所有被选择节点的坐标系。
–在所有选择的节点上施加一个UX 位移约束(或者施加一个FX 的力)。注意极径方向。
–激活笛卡尔坐标系(CSYS,0).
–在当前激活的坐标系中旋转所有选择节点的坐标系。
–重新画出节点,注意新载荷的方向。
C. 求解器
·求解器的功能是求解代表结构自由度个数的线性联立方程。
·求解的速度主要取决于模型的大小和您计算机的速度,所用时间可以是几秒,也可以是几小时。
·只有一个载荷步的线性静态分析只需一次求解,而非线性或瞬态分析可能需要几十
个,几百个甚至几千次求解。
因此,选择求解器的类型是很重要的。
·ANSYS 中可用的求解器可以分为三类:
–直接消去求解器
·波前求解器
·稀疏求解器(缺省)
–迭代求解器
·PCG (预制条件共轭梯度求解器)
·ICCG (不完全乔利斯基共轭梯度求解器)
·JCG (雅可比共轭梯度求解器)
–并行求解器(需要特殊的授权文件)
·AMG (Algebraic Multigrid)
·DDS (分布区域求解器)
·直接消去求解器求解以下内容:
1.计算单元刚度矩阵。
2.读取第一个单元的自由度。
3.删除所有已知自由度或通过其它自由度可以表示的自由度, 然后把方程写入.tri文件。保留的自由度构成波前。
4.对所有单元重复2,3步骤直到所有的自由度都被消去。现在的.tri就包含了一个三角化的矩阵。
5.回代求解自由度,然后使用单元矩阵计算单元解。
·由于自由度仍不能被排除,所以波前是对角化过程中保留在求解器中的自由度数。它随着求解的进行增大或缩小,当最后自由度消去完成后,波前数变为零。
·波前直接影响到计算的速度:值越大,速度越慢。
·重新进行单元编号—为求解器选择一个合适的单元编号顺序—可以减小波前数。ANSYS 在一开始就自动对单元重新编号。
·迭代求解器通过以下步骤求解:
1.计算单元刚度矩阵。
2.组集总体刚度矩阵。
3.开始时把所有自由度的值设为零,然后一直迭代到收敛(基于输入的残余力的容许值)。
4.用单元刚度矩阵计算单元解。
·在ANSYS 中迭代求解器和PCG, JCG, ICCG 的主要区别是所使用的预条件控制不同。
2 ANSYS加载时间函数的方法
2 ANSYS加载时间函数的方法 Apply/Functions/Define/Edit打开函数编辑器 ●Functions Type:选择函数类型。选择单个方程或多值函数。如果选择后者,必须键入状态变量名,也就是管理函数中方程的变量。当选择一个多值函数时,六状态表格将被激活。 ●Degrees/Radians:选择度或弧度,这一选择仅决定方程如何被运算,而不会影响*AFUN 设置。 ●使用初始变量方程和键区定义结果方程(单个方程)或描述状态变量的方程(多值函数),出如果定义单方程函数,保存方程。如果是定义多值函数,则继续下面的步骤。 ●单击Regime1,键入在函数表格下定义的状态变量的相应的最大最小值限制。 ●定义这个状态的方程。 ●单击Regime2,注意状态变量的最小值限制已被定义并且不可更改,这一特征确保状态保
持连续而无间隙。定义这个状态的最高值限制。 ●定义这个状态的方程。 ●在六个状态中连续如上操作。在每个状态里,不必储存或保存单个方程,除非想在另一状态中重用某个方程。 ●输入一个注释描述函数(可选)选择File/Comments。 ●计算器区域 使用计算器,你可以在输入表达式时,加入标准的数学操作符和函数调用,你只需点击序列数字,运算符或者函数等按钮,就可把函数加入表达式中,点击INV按钮,可轮流改变部分按钮的函数功能。 ?按钮“(”与“)”按钮,成对使用圆括号强制改变表达式中的运算顺序。 ?MAX/MIN按钮:查找变量中最大值/变量中最小值。 ?COMPLEX/CONJUGATE按钮:形成一个复变量/对一个复数变量执行共轭运算,利用INV 按钮进行函数功能切换。 ?LN/e^X按钮:求一个变量的自然对数/求变量的e次幂,利用INV按钮进行函数功能切换。?STO/RCL按钮:将表达式区域信息存储在内存中/从内存中恢复重复使用的表达式,利用
ANSYS中加载与求解中的难点和陌生点
ANSYS中加载与求解中的难点和陌生点 1:对于加载的流程可以再有限元模型上加载也可以在几何模型上,但是是有区别的,几何模型的荷载独立于即将成型的有限元模型,可以自由修改网格,但是有限元模型上的荷载不行,必须先删除荷载,再修改网格,然后再重新输入荷载,原因很简单,如果你在有限元模型上建立荷载,那么已经网格划分完毕的节点被荷载依附,这样如果重新修改网格,有限元网格节点发生变化,那么荷载也就失去了整体性依附的特质,所以显然无法直接修改网格。 2:自由度约束如果是施加在线,面上,注意不要误以为施加在几何模型上,而是施加在有限元模型上,其实是施加在相应图素的节点上,所以必须先划分网格形成有限元模型以后才能施加对应的线面约束,注意是不是说约束就只能在有限元模型上施加呢,不是,因为还有关键点施加自由度约束,所以两种模型施加还是成立的,由此可见,施加自由度约束的对象是点是没有变的,关键看是关键点还是节点,节点按是不是一个图素的所有节点。 3:对于施加荷载或者删除荷载或者建立生死单元等等一系列针对对象的操作必须在选择之后完成,求解器进入前或者进入后处理前必须完成选择和FINISH命令。 4:施加集中荷载注意是针对节点坐标系的,只有集中荷载时,NTROTA,一般默认的是总体坐标系,这里注意整体坐标系和局部坐标系,柱坐标系,直角坐标系,球坐标系的区别。前面两者是两类,两类中又可以分别包含后三类,后面一类还多加环坐标系一类。 5:施加面荷载是难点,因为ANSYS中的面荷载时包括线荷载的。所以针对不同的单元类型,面荷载的单位和加载命令式不同的,比如对于2D单元不能使用SFA命令,对于3D单元不能使用SFL命令,对于梁单元施加单元荷载只能使用唯一的加载命令SFBEAM,另外对于SFE命令非常容易出错,因为要在对应的面号上进行施加,所以一般我们采用SFL,SFA命令,单位也不同,比如2D单元的面荷载是除以面积,壳单元的SFL是除以长度。 6:荷载步,子步,时间,平衡迭代是难点。在求解控制中最难的就是分清楚何种分析类型,注意几个范畴的区别,比如静力分析,动力分析,非线性分析等区别和命令的差异。其实分析的类型包括静力分析,瞬态分析,模态分析,谐分析,谱分析,屈曲分析,子结构分析等等。而非线性和线性分析师隶属于其各分析类型下的,只能说有的分析类型只能进行线性的分析。比如谐分析。对于静力线性分析比较简单,如果有非线性的因素有些命令必须掌握,
ansys 载荷施加
2.1 载荷概述 有限元分析的主要目的是检查结构或构件对一定载荷条件的响应。因此,在分析中指定合适的载荷条件是关键的一步。在ANSYS程序中,可以用各种方式对模型加载,而且借助于载荷步选项,可以控制在求解中载荷如何使用。 2.2 什么是载荷 在ANSYS术语中,载荷(loads)包括边界条件和外部或内部作用力函数,如图2-1所示。不同学科中的载荷实例为: 结构分析:位移,力,压力,温度(热应变),重力 热分析:温度,热流速率,对流,内部热生成,无限表面 磁场分析:磁势,磁通量,磁场段,源流密度,无限表面 电场分析:电势(电压),电流,电荷,电荷密度,无限表面 流体分析:速度,压力 图2-1 “载荷”包括边界条件以及其它类型的载荷 载荷分为六类:DOF约束,力(集中载荷),表面载荷,体积载荷、惯性力及耦合场载荷。 2DOF constraint(DOF约束)将用一已知值给定某个自由度。例如,在结构分析中约束被指定为位移和对称边界条件;在热力分析中指定为温度和热通量平行的边界条件。 2Force(力)为施加于模型节点的集中载荷。例如,在结构分析中被指定为力和力矩;在热力分析中为热流速率;在磁场分析中为电流段。 2Surface load(表面载荷)为施加于某个表面上的分布载荷。例如,在结构分析中为压力;在热力分析中为对流和热通量。 2Body load(体积载荷)为体积的或场载荷。例如,在结构分析中为温度和fluences;在热力分析中为热生成速率;在磁场分析中为流密度。
2Inertia loads(惯性载荷)由物体惯性引起的载荷,如重力加速度,角速度和角加速度。主要在结构分析中使用。 2Coupled-field loads(耦合场载荷)为以上载荷的一种特殊情况,从一种分析得到的结果用作为另一分析的载荷。例如,可施加磁场分析中计算出的磁力作为结构分析中的力载荷。 其它与载荷有关的术语的定义在下文中出现。 2.3载荷步、子步和平衡迭代 载荷步仅仅是为了获得解答的载荷配置。在线性静态或稳态分析中,可以使用不同的载荷步施加不同的载荷组合-在第一个载荷步中施加风载荷,在第二个载荷步中施加重力载荷,在第三个载荷步中施加风和重力载荷以及一个不同的支承条件,等等。在瞬态分析中,多个载荷步加到载荷历程曲线的不同区段。 ANSYS程序将把在第一个载荷步选择的单元组用于随后的所有载荷步,而不论你为随后的载荷步指定哪个单元组。要选择一个单元组,可使用下列两种方法之一。 Command(s)(命令): ESEL GUI: Utility Menu>Select>Entities 图2-2显示了一个需要三个载荷步的载荷历程曲线-第一个载荷步用于(ramped load)线性载荷,第二个载荷步用于载荷的不变部分,第三个载荷步用于卸载。 图2-2 使用多个载荷步表示瞬态载荷历程。 子步为执行求解的载荷步中的点。使用子步,有如下原因。 2在非线性静态或稳态分析中,使用子步逐渐施加载荷以便能获得精确解。