多视点云数据快速对齐方法

第25卷第1期2009年1月
机械设计与研究
MachineDesignandResearch
V01.25No.1
Feb.,2009
文章编号:1006—2343(2009)01-007-03
多视点云数据快速对齐方法
康兰,冯亚娟,陈正鸣
(常州市数字化重点实验室,河海大学机电工程学院,江苏常州213022,E—mail:kangl@hhuc.edu.cn)
摘要:多视点云数据的对齐(拼接)问题是逆向工程研究的热点问题之一。在ICP算法的基础上,提出通过在数据测量时放置基准物体,建立点云数据对齐特征,在进行多视点云数据拼接时对对齐特征增加约束的方法,实现多视点云数据的快速对齐。并对基于三个基准点约束对齐的对齐精度进行了分析,提出了减少对齐误差的措施。最后通过实例对研究结果加以分析验证.
关键词:逆向工程;ICP算法;约束;多视点云数据对齐;对齐精度
中图分类号:TP391.72文献标识码:A
ResearchonPointCloudQuickRegistrationof
MultipleViewsBasedonRestraints
KANGLan,FENGYa-juan,CHENZheng-ming
(KeyLaboratoryfordigitalmanufacturingofChangZhouCity,CollegeofMechanicaland
ElectricalEngineering,HohaiUniversity,Changzhou213022,China)
Abstract:Pointcloudregistrationofmuitipleviewsisoneofresearchproblemsinreverseengineering.Inthispe?perbasedonICPalgorithmaquickregistrationmethodofmultipleviewsisputforwardbyplacingreferenceobjectsdur-ingmeasuringproduct,thentheregistrationfeaturesarebuiltintermsofreferenceobjects,andrestraintsbetweenreg?istrationfeaturesareaddedtoaccomplishquickregistration.Registrationaccuracyisanalyzedwiththreefiducialpointsrestraints,andthestrategyforreducingregisteationelrorsisgiven.Finallyaninstanceisillustratedbasedontheaboveresearchwork.
Keywords:reverseengineering;ICPalgorithm;restraints;pointcloudregistrationofmultipleviews;registra-tion
accuracy
逆向工程也称反求工程(Reverseengineering,RE),是将实物转变为CAD模型的相关数字化技术、几何模型重建技术和产品制造技术的总称…。其主要流程是利用精密的测量系统将实物模型或手丁模型的轮廓三维尺寸快速测量出来,并对这些大量的离散数据或称点云数据(pointcloud)进行处理,由点云来拟合曲面,从而得到原物体的CAD数字化模型,再通过快速成型,模具设计加工或NC编程加工得到复制的产品。
实际测量中,由于受扫描仪测量范围、实物尺寸、实物内部形状等的影响,不可能一次扫描完成对整个实物的数据测量,需要多次进行测量,然后将多视点云数据进行对齐,从而得到一完整的反映实物全貌的i维点云数据,为后续实物三维重建的其它操作提供nr靠的数据模型。多视点云数据对齐问题一直是逆向-1二程研究热点问题之一,其数据对齐方法、运算速度及其对齐精度直接影响着后续CAD数字化模型重建
收稿日期:2008—09—05
基金项目:江苏省自然科学基金资助项目(BD2007042);江苏省“六大人才高峰”资助项目(06一D一034);河海大学创新基金资助项目(xzxl088022~01)的成功与否。因此,国内外许多研究者就多视点云数据的对齐问题开展了大量的研究工作,提出了多视点云数据对齐的若十解决方法¨。“。在逆向工程中,对多视点云数据的对齐在数学上描述为:设用{P。Ip;∈R3,i=1,2,…,Ⅳ}表示第一个点集,用{q;Iq;∈砰,i=l,2…,M}表示第二个点集,找出两个点集的空间变换,使两个点集中的相同点进行匹配,两个点集的对齐变换是应用最小二乘法使下列目标函数为最小:
F(R,r)=∑[却t+r—pj,]2=min(1)点的对齐问题的研究也就集中在对式(1)的快速两有效的求解上,式(1)是一高度的非线性问题,其中P;’表示在{q。}中找到与P;匹配的对应点,使两者离差平方和为最小。Horn等于1987年提m用四元数法(Quatemion)[sj来求解式(1)。Arnn等于1987年提出用SVD法(SingularValueDecomposition)¨1来求解点集的对齐问题。Besl和Mckay于1992年提出了著名的ICP算法(herativeCloselPointAlgo—rithm)…,来解决数据的映射对齐问题,目前ICP算法在计算机可视化、图像匹配、人_T.智能、机器人等领域有着广泛的应用,ICP算法的数学描述如下:
F(R,T)=∑[Rp‘+T—NearestPt(p1)]2min(2)
万方数据
8机械设计与研究第25卷
式中:NearestPt(p。)表示在{q;}中找到以欧几里得(Euclide-
a11)距离度量的最靠近Pi的一点,ICP算法的主要思想是通
过多次迭代,将多次迭代的增量变换P。和瓦多次作用于两
数据点集上,当最小二乘误差小于一事先设定的阈值时,迭
代终止,由P。和瓦的累积构成了R和,,从而实现两点云数
据的对齐。在基于以上ICP方法的基础上,提出在测量数据
时建立相应的对齐特征,通过在对齐时对齐特征加入约束关
系,实现点云数据的快速对齐,从而提高对齐运算的效率,提
高计算机的运行速度,在保证一定的对齐精度的前提下,实
现多视点云数据的快速准确对齐。
算法主要步骤如下:
(1)建立用于对齐的两数据点集{q;}和{P;}。
(2)建立对齐约束关系。
(3)据约束关系构建{q;}和{P;}的全局坐标和局部坐
标系。
(4)通过在全局坐标系下对齐{q。}和{P;}的局部坐标
系,求解出旋转变换矩阵兄和平移变换矩阵710
(5)将第(4)步的变换R和r作用于数据点集上,完成
{q;}和{P;}的对齐。
从以上分析可看出,由于约束关系的添加,通过约束关
系直接可确定出两数据点云中距离最近的点,只要一次迭代
运算,就能求解出尺和r。
1约束
1.1约束的建立
从ICP算法可看出,在按Euclidean距离对{耐}中的离散
点班计算其最近的∥点过程中,如果增加两个最近点之间
使其距离达到最小的某种约束关系,以实现点云数据的快速
对齐。可以利用物体表面的一些特征点、特征线、特征面来
构建约束关系,若在两次测量中保证有重叠的测量区域、让
物体表面的一些特征点、线或面位于重叠的区域中这些相的
特征点、线或面添加约束关系,并利用这些约束关系进行对
齐,就可实现多视点云的快速对齐。约束关系的类型及增加
约束关系后(对齐后)的结果分析如表1所示。
表1基于约束的对齐分析
对齐
特征
起始特征约束前(对齐前)约束后(对齐后)
离散点
点圆及圆弧●●两点共点●
中心/球心
线
/一两线共线
直线/一一
圆锥/圆柱轴
直线,圆锥/圆柱轴两线段平行且同向方向平面法线/,/√圆/圆弧法向轴
两线段共线且同向
线/r/
方向线
/
圆锥/圆柱轴
线两线段共线并有固定线圆锥/圆柱轴/,相同的方向和起点圆/圆弧法向轴/
平面0口两平面共面平面固
圆/圆弧
2.2对齐特征的建立
表1所列的各种对齐特征不一定每个物体的表面都存在,即使有也不一定在两次测量中都能被同时测量到,而且有些不明显或凹凸不平的特征扫描时无法扫描到,因此在实际测量中可预先设置对齐特征。如扫描时放置一特征明显易于识别的基准物体或基准标识作为对齐特征,可在物体表面粘贴一些圆点、小球或制作一带有圆点标识的基准板,数据对齐时以这些圆点的圆心或球心为对齐特征进行对齐,也可在物体之外放置圆球、圆柱、圆锥等物体,对齐时以它们的球心、轴或面为对齐特征。
2基于约束的多视点云数据对齐
在点云数据中最基本的元素是离散的点,最基本的对齐特征是点,表1中其它的对齐特征都由若干离散的点拟合得到,因此,基于点特征约束对齐的求解具有一般性,且对齐精度也最高,下面讨论基于三个基准点特征对齐方法,由此方法可以建立其它对齐特征的坐标变换。
2.1建立全局坐标系
要在计算机屏幕上绘制所测最的点云数据时,首先要解决定位问题。这些测茸数据在测量时已通过测县软件建了一全局坐标系统,即将摄像机同定并使之对准被测物体,并完成正确的标定的过程,这实际是一视点变换的过程,所构建的坐标系为全局坐标系,在测量中绐终是固定不变的,用0-XYZ表示。
2.2建立局部坐标系
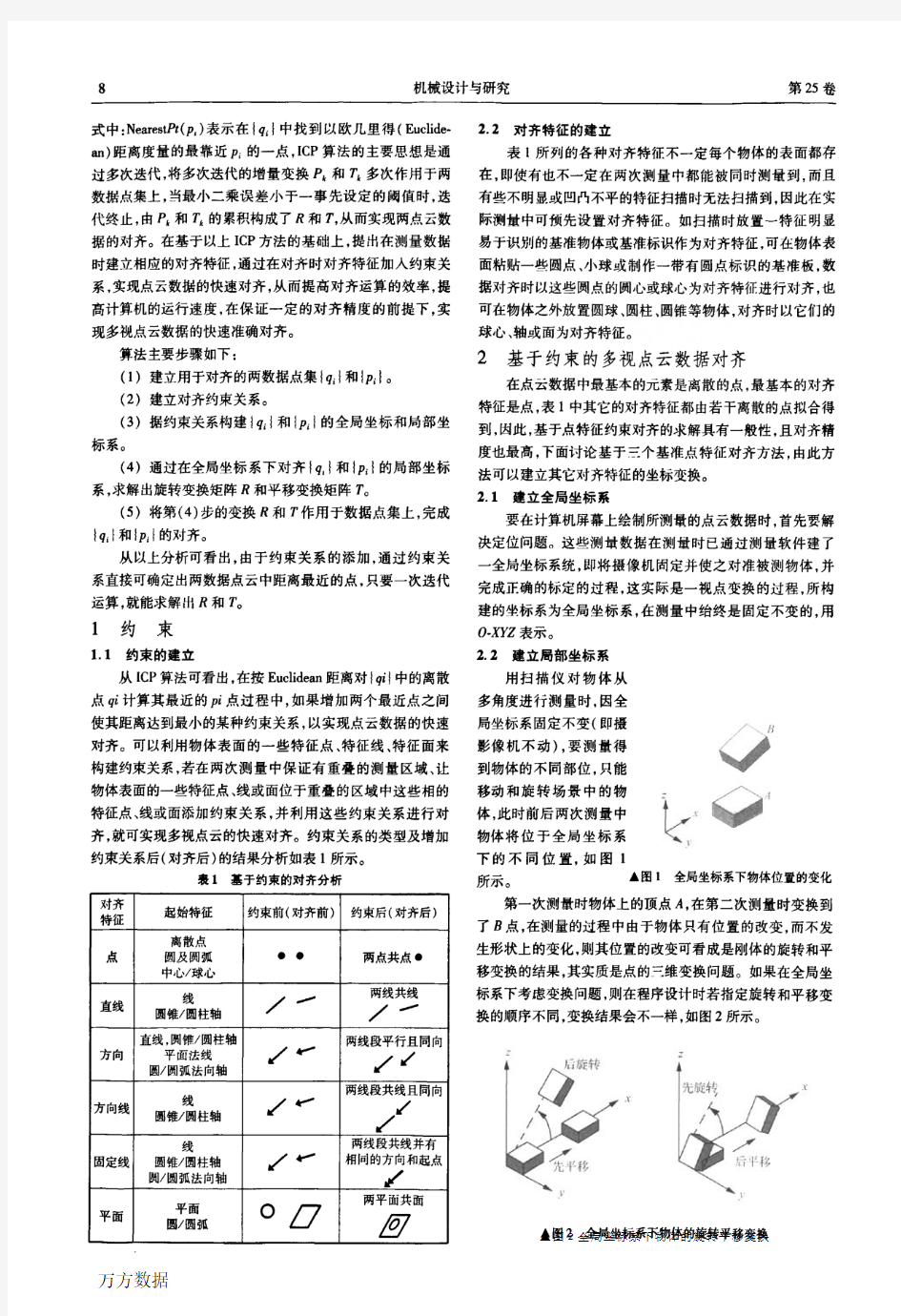
用扫描仪对物体从
多角度进行测量时,因全
局坐标系固定不变(即摄
影像机不动),要测量得
到物体的不同部位。只能
移动和旋转场景中的物
体,此时前后两次测量中
物体将位于全局坐标系
下的不同位置,如图1
所示。▲图1全局坐标系下物体位置的变化第一次测量时物体上的顶点A,在第二次测量时变换到了口点,在测量的过程中由于物体只有位置的改变,而不发生形状上的变化,则其位置的改变可看成是刚体的旋转和平移变换的结果,其实质是点的互维变换问题。如果在全局坐标系下考虑变换问题,则在程序设计时若指定旋转和平移变换的顺序不同,变换结果会不一样,如图2所示。
▲图2全局坐标系下物体的旋转平移变换
万方数据
第1期康兰等:多视点云数据快速对齐方法9
为使变换结果与旋转平移的先后顺序无关,可以通过对物体建立一局部坐标系的办法来解决此问题。局部坐标系可看成是与测最物体捆绑在一起的一坐标系,所有的变换将导致坐标系的变换,平移变换将同时沿坐标轴移动物体和局部坐标系,旋转变换是物体绕局部坐标系的原点旋转,即物体在原地旋转,从而保证程序设计时与变换顺序的无关。
由于不在同一直线上的三点可确定一平面,利用平面及其平面的法线来建立局部坐标系,设物体表面的三个点分别为口。,口:,均,通过以下叉积得到该平面的法线;[口。一”:]×[a,一玑],法线为z轴,三点构成的平面为0一xy坐标面,建立局部坐标系,这三个点是下面用于对齐时的三个基准点。2.3基准点的变换
物体在|司定不变的全局坐标下进行测量时,旋转和平移物体可看成是对局部坐标系进行的变换,若在每一次测量中都能保证前后两点云有三个相的点被测量到,则每次扫描得到的这些点都处在以当前全局坐标系为固定坐标的两个不同的局部坐标系中。这样通过坐标变换将这三个点统一到同一局部坐标系下,则就能解决多视点云数据的对齐问题,在测量的过程中由于物体只有位置的改变,而不发生形状上的变化,则其位置的改变可看成是刚体的旋转和平移变换的结果,其实质是点的i维变换问题。由于三点可确定一坐标系,因此我们采用基于三个基准点的对齐方法,前后两次测量中保证有三个相同的基准点被测量到,设基准点A在第一次测量时,其在局部坐标系中的定义为A=p(石,y,z),第二次测量时,其局部坐标系中的定义为A’=P(算’,Y’,:7),可通过如下坐标变换来实现两点的对齐:A’=/CA+r,通过用户交互操作给定A与A’的对齐约束关系后,可求解出R和71,将R和r变换用于点云数据集上,不需要进行多次运算,就可得到使,(尺,T)=min的解,实现多视点云的快速准确对齐。2.4基于约束的对齐精度问题
对齐的精度直接决定着物体重构的精度,对齐的误差主要来源于以下两个方面:①测量误差占,:测量时由于测量系统本身的精度、基准点的定位或大小设置不当而产生的测量误差。②对齐误差占::基准点或基准球的中心是通过拟合它们内部所包含的点,找到拟合圆的圆心或球心作为对齐的基准点,拟合误差造成了对齐误差。由于精度问题是一个复杂的问题,无法用一较精确的度量方法进行评估,在综合考虑以上误差源后,即可提出在基于基准点约束对齐方法中减小误差的以下几个措施。
(1)用于对齐的三个基准点应设置成j角形形状,三点之间的距离应尽可能大,即三点构成的三角形的面积尽可能大,以减少基准点的测量误差。基准点应贴在每次都能扫描到位置,设置在死角处的基准点没有什么意义。
(2)基准点要有一定的大小,以便能在点云数据中得到反映,基准点的大小影响其后的拟合误差,如果基准点设在物体表面,因基准点所在处会使物体表面的点云出现空洞,因此基准点还要尽量小,其大小与扫描范围有关,其大小关系如表2所示。
表2基准点的大小
扫描范围基准点直径
200×150mffl3nlln
400×300mill5toni
800×600mm8mln
(3)在对齐误差中,由于三个基准点的相对位置不变,即变换是刚体变换,因此第一对基准点的对齐误差影响最大,若能够固定一对基准点,则固定基准点的误差只有占.,82=0。为此在测量时可将物体放置在一以某一基准点圆点(或基准球球心)为旋转中心的回转T作台上,通过旋转T作台完成对物体的多视测量,并确保每次扫描时都能扫描到此中心点,则在对齐时以此点为已对齐的一固定基准点,只要对齐另外的两基准点对即可,从而提高对齐的精度。
3多视点云数据对齐实例分析
本实例完成的硬件平台是用基于结构光法的3DSS三维扫描仪完成数据的采集,实现算法的软件平台是openGL,openGL是用于开发简捷的交互2D和3D图形应用程序的最佳环境c及c“都能调用openGL函数,利用openGL的顶点数组voidglVertexPointer()函数来调入各点云数据;全局坐标系用函数gluLookAt()来实现,其中的参数分别指定了相机(或视点)的位置、朝向和向上向量,向上向量定义了相机的方向;坐标变换利用函数voidglRotate(fd)()和voidsl—Translate(fd)()来实现。鼠标表面是一典型自由曲面,因而无法有数学方程或机械制图的方法来表达和传递其形状信息,因此,对其进行多视测量,得到多视点云数据后,进行多视点云数据对齐的测试具有一般性。我们通过对鼠标设置不同的对齐特征,进行测量并增加约束后对对齐的结果进行分析比较,以基于三个基准点特征为对齐约束的精度较高,将其中一基准点固定后再测量对齐的精度最高,这与理论分析的结果相一致。但当物体尺寸较大时,不一定每次都能保证测量到同一基准点,此时只要基准点大小和定位合理,基于三个基准点对齐的方法,有足够的对齐精度保证设计要求,当然精度问题是一相对问题,精度应达到多少重构模型才是合格的,这取决于设计要求。
如图3所示是部分视角测量数据,图4是对齐后的数据模型,图5是对数据进行精减后的模型。
▲图3多视点云数据
(下转第14页l
万方数据
机械设计与研究第25卷
极小化目标函数确定自由度,从而得到下段曲线的控制顶
点,从而得到整条插值曲线。目标函数的形式简单,容易确
定曲线所需的自由度,从曲线的形状进行比较,所以该方法
优于在拼接点处达到参数G2连续的曲线,并且除首段曲线
外,其余的插值曲线的自由度可以通过求解三次多项式方
程来获得,从而可以得到捕值曲线的控制顶点,计算量小。
此外,也可以根据需要在所得的自由度值得附近继续调整曲
线,以达到满意的效果,曲线调节更加方便,而且可以通过改
变首段曲线的首端的相对曲率及其切矢对曲线进行调节。
参考文献:
[1][2][3][4]FrainG.CurvesandSurfacesforComputerAidedGeometricDe—
sign:A
PracticalGuide[M].NewYork:AcodeIIlic
Press,1989.
AhlbergJH,NilsenEN,Walsh
JL.TheTheoryofSplinesand
TheirApplications[M].NewYork:AcademicPress,1967.
苏步青,刘鼎元.计算几何[M].上海:科学技术出版
社.1982.
HymanJM.Accuratemonotonieitypreservingcubicinterpolation
[J].SIAMJournalonScientificandStatisticalComputing,1983,
4(4):645~654.
[5]DelbourgoR。GregoryJA.Shapepreservingpiecewiserational
quadraticinterpolation[J].SIAMJournalonScientificandStatis-
ticalComputing.1985,6(4):967~976.
[6]张彩明,汗嘉业.可调整c2四次B6zier插值曲线的构造[J].
计算机学报,2004,27(12):1665~1671.
[7]张彩明,汪嘉业.c2连续的四次样条曲面插值[J].中国科学
(E辑),2003,33(2):116—126.
[8]朱心雄.自由曲线曲面造型技术[M].北京:科学出版
社,2000.
[9]彭家贵。陈卿.微分几何[M].北京:高等教育出版
社,2002.
[10]TerzopoulosD,PlattJ,BarrA.Elasticallydeformablemodels
[J].ComputerGraphics,1987,24(4):205—214.
[11]宋来忠,王志明.数学建模与实验[M].北京:科学出版
社.2005.
作者简介:杨文颖(1984一),女,硕士研究生,研究方向为:计算
机辅助几何设计。
o●oo●oo●oo●oo◆no●oo◆oo●oo●ou●oo●oo●oo●oo◆oo●oo●oo●oo●oo●oo●uo●oo●oo●oo●oo●oo●oo●oo●oo●o口●uo◆oQ◆oo●oo●oo◆oo◆oo◆oo●oo●oo●oo●oo●oo●u0●oo●00◆o(上接第9页)
图4多视点云数据对齐后的模型▲图5数据精减后的模型4结束语
ICP算法是解决两个及两个以上不同空间的映射问题的一方法,在航空航天、机器人等许多科学研究领域得到了广泛的应用,将其应用于逆向工程中,能够很好地解决不同点集间的映射问题。因此,在ICP算法的基础上提出通过增加各种对齐约束关系,求解ff{变换矩阵R和r、将它们作用于点云上,从而实现点云的快速准确对齐,该方法运算过程简单,对齐精度较高,而且通过在测量过程中合理设置对齐特征,可进一步提高对齐精度,为后续3D重构提供较精确的3D数据模型。
参考文献:
[1]金涛。童水光.逆向工程技术[M].北京:机械工业出版社.2003.
[2]王宫,钟约先.大面积形体测最数据拼接技术的研究[J].机械设计与制造,2007,9(9):90—92.
[3]张舜德,卢秉恒,丁玉成.光学三维形面分区域测量数据的拼接研究[J].中国激光,2001,28(6):533—536.
[4]孙军华。张广军,魏振忠,等.基于平面基线靶标的视觉测量数据拼接方法[J].机械工程学报,2006,42(7):192—195.[5]HornbkP.closed—fromsolutionabsoluteorientationusingunitquatemions[J].JournaloftheOpticalSocietyofAmericaA,
1987,4(4):629—642.
[6]ArunKS,HuangTS,andBlosteinSD,least—squaresfittingoftwo3一dpopintsets[J].IEEETransactionsonPatternAnalysis
andMachineIntelligence,1987,9(5):689~700.
[7]PJBesl,NDMckay.Amethodforregistrationof3Dshape[J].1EEETransactionsonPatternAnalysisandMachineIntelligence,
1992,PSMI一14(2):239~256.
[8]JYLai,WDUeng,cYYao.Registrationanddatamergingfor
multiplesetsofacalldata[J].AdvaneodManufacturingTechnol—
ogy,1999。15(1):54—63.
[9]DavidWEggert,AndewWFitz跏bon,RobertBFisher.Simuha-neou8RegistrationofMultipleRangeViewsforUseinReverse
Engineering
ofCADModel[S].ComputerVisionandlinageUn-derstanding,1998,69(3):253—272.
[10]HongTzongYen,ChunYamChen,RobertWilhelm.Registration
andintegrationofmultiplelaserscanneddataforreverseengi—
neeringofcomplex3Dmodels[J].InternationalJournalofPro-
ductionResearch,2000,38(2):269—285.
[11]WilliamsJ,BcmmamounM.Simultaneousregistrationofmultiplecorrespondingpointsets[J].ComputerVisionandImageUnder-
standing,2001,81(1):117~142.
[12]YauHT。ChenCY,WilhelmRG.Registrationandintegration
of
multiple
laserscanneddataforreverse
engineering
ofcomplex3Dmodels[J].InternationalJournalofProductionResearch,
2000,38(2):269—285.
作者简介:康兰(1965一),女,副教授,硕士生导师;主要研究
方向:CAD、CG及逆向工程,发表论文lO余篇。万方数据
多视点云数据快速对齐方法
作者:康兰, 冯亚娟, 陈正鸣, KANG Lan, FENG Ya-juan, CHEN Zheng-ming
作者单位:常州市数字化重点实验室,河海大学机电工程学院,江苏常州,213022
刊名:
机械设计与研究
英文刊名:MACHINE DESIGN AND RESEARCH
年,卷(期):2009,25(1)
引用次数:0次
参考文献(12条)
1.金涛.童水光逆向工程技术 2003
2.王宫.钟约先.袁朝龙.马扬飚.李仁举大面积形体三维测量数据拼接技术的研究[期刊论文]-机械设计与制造2007(9)
3.丁玉成.张舜德.卢秉恒光学三维形面分区域测量数据的拼接研究[期刊论文]-中国激光 2001(6)
4.孙军华.张广军.魏振忠.周富强基于平面基线靶标的视觉测量数据拼接方法[期刊论文]-机械工程学报 2006(7)
5.Horn b k p closed -from solution absolute orientation using unit quaternions 1987(4)
6.Arun K S.Huang T S.Blostein S D least -squares fitting of two 3 -d popint sets 1987(5)
7.P J Besl.N D Mckay A method for registration of 3D shape 1992(2)
8.J Y Lai.W D Ueng.C Y Yao Registration and data merging for multiple sets of scan data 1999(1)
9.David W Eggert.Andew W Fitzgibbon.Robert B Fisher Simuhaneous Registration of Multiple Range Views for Use in Reverse Engineering of CAD Model 1998(3)
10.Hang Tzong Yen.Chun Yam Chen.Robert Wilhelm Registration and integration of multiple laser scanned data for reverse engineering of complex 3D models 2000(2)
11.Williams J.Bcmmamoun M Simultaneous registration of multiple corresponding point sets 2001(1)
12.Yau H T.Chen C Y.Wilhelm R G Registration and integration of multiple laser scanned data for reverse engineering of complex 3D models 2000(2)
相似文献(10条)
1.学位论文吕宗宝三维点云数据配准技术的研究与应用2008
逆向工程是针对消化、吸收先进技术的一系列分析方法和应用技术的组合。利用逆向工程技术可充分吸收国外先进的设计制造成果,使我国的产品设计立于更高的起点。研究逆向工程关键技术并开发具有自主知识产权的求逆系统具有重要的现实意义。
本文提出的三维扫描误差分析系统是基于机器视觉光栅编码原理的双目视觉测量技术。本文对该系统的硬件系统作了精心的选择和设计并对本系统误差分析软件中的关键技术的算法及实现做了详细的论述。该误差分析部分分为三维数据格式的读取和显示、基于拾取点的三维图形的预配准和基于ICP算法三维图形的完整配准、误差值的求取和误差值的彩色显示等四个技术单元。
误差分析部分是本三维扫描误差分析系统的一个重要环节,本文讨论了包括人机交互界面拾取、多视数据对齐定位及不同三维数据间的误差值求取等技术。研究了一种快速的“基于正交射影法”的空间点拾取技术并对ICP算法进行了改进。最后对所做的工作进行了总结,并对逆向工程技术的发展前景作了展望。
2.期刊论文梁永波.LIANG Yong-bo基于拾取点与ICP算法的三维图形重定位研究与实现-煤矿机械2006,27(8)
介绍了基于拾取点的粗重定位算法,同时给出相关实验结果.对基于ICP算法的精重定位算法及实现进行了详细论述,得出利用该算法进行三维图形重定位能使重定位误差限制在±0.02 mm范围内的结论.
3.学位论文肖胜兵结构光面扫描误差分析系统的设计2006
逆向工程是一门快速发展的新兴学科,是一门综合运用计算机视觉、计算机图形学、控制理论、数字图像处理、传感器等各种先进理论、技术和方法的系统工程,是各学科交叉的前沿研究领域。逆向工程与快速成型的结合,带来了一种全新的产品设计、制造及三维尺寸测量模式。目前国外的反求设备和软件的发展较快,水平较高,但是价格也很昂贵,因此,开发出国产的设备和软件是当务之急。
本文概述了逆向工程技术在国内外的研究、应用状况及其在快速成型技术中的重要作用,同时对本课题的理论及现实意义作了阐述。本文提出的结构光面扫描三维测量系统是基于机器视觉光栅编码原理的结构光扫描双目视觉测量技术。本文对结构光面扫描三维测量的硬件系统作了精心的选择和设计并对本测量系统误差分析软件中的关键技术的算法及实现做了详细的论述。该误差分析部分分为三维数据格式的读取和显示、基于拾取点的三维图形的预拼合和基于ICP算法的三维图形的完整拼合、误差值的求取和误差值的彩色显示三个技术单元。
误差分析部分是结构光面扫描三维测量系统的一个重要环节,本文讨论了包括人机交互界面拾取、多视数据对齐定位及不同三维数据间的误差值求取等技术。另外针对结构光面扫描三维测量系统和本误差分析软件部分的特点,提出了一种快速的“基于正交投影射线法”的空间点拾取技术和在误差值求取过程中一种高效的判别“点在三角形内”的方法,并给出具体实现细节。
最后对本人所做的工作进行了总结,并对逆向工程技术的发展前景作了展望。
4.学位论文戴静兰海量点云预处理算法研究2006
逆向工程技术是当今CAD领域中的一项新技术,它以独特的从实物模型直接构建计算机模型的手段为CAD技术带来了革命。逆向工程中从实物模型采集而来的数据一般是以点云形式存在。随着激光扫描设备的广泛应用,采集所得的点云数据越来越庞大,达到了百万级甚至亿级。为了对这些海量点云数据进行建模,就必须进行必要的预处理手段,否则将为后续的建模带来难以想象的困难,为CAD系统带来巨大的存储、传输和运算负担。
在对已有的点云预处理算法进行了系统的研究的基础上,本文针对海量点云的预处理进行了研究,提出了三种全新的海量点云预处理算法,分别应用于点云去噪、点云配准和点云精简三个方面。通过在实验平台上的实现算法,经过大量实践中证明了它们是可行的并且具有高效高精度的特点。
本文首先提出了一种基于图像的点云去噪算法,通过图像的方法对点云进行去噪处理,因此与点云数据的大小无关,在海量点云的处理中具有远超其他算法的速度。实验结果表明,该算法的去噪效果也是比较理想的。另外针对稀疏点云的特点,同时提出了一种基于k-dtree的无序点云去噪算法。 对于点云配准,提出了一种基于特征点的改进ICP算法。该算法在采用主方向贴合法实现初始配准的基础上,使用曲率特征点和k-dtree寻找最近点,提高了ICP算法的效率。实验结果表明,该算法具有理想的配准效果,并且大大提高了配准速度,这在海量点云处理中尤其明显。
点云精简是海量数据预处理中重要的步骤。本文结合了随机采样和曲率采样各自的长处,提出了一种混和采样方法。这种算法能够在基本保持原始数据的细节的基础上,极大地减少点云数据量,同时也能保持较高的速度。由于其较好的综合表现,在实际应用中具有良好的应用价值。
5.学位论文徐尚三维点云数据拼接与精简技术的研究2009
逆向工程技术是进行产品设计、开发和创新的先进制造技术,其已发展成为CAD中一个相对独立的范畴。三维点云数据处理技术是逆向工程中的关键技术之一,其中数据拼接与精简技术是数据处理的两个重要组成部分,决定着后续曲面建模的质量和效率,具有十分重要的研究意义。本文对逆向工程中三维点云数据的拼接和精简技术做了深入细致地研究,主要的研究内容有以下几个方面:
1.提出并实现了一种基于曲面拟合的精确拼接ICP算法一双向插补点到面ICP算法。针对经粗拼接后大致对准到同一坐标系下的两片点云,首先对其重叠区域进行B样条曲面拟合,使用插补出的点确立初始对应点集;提出“辅助点对”约束,并结合曲率约束去除错误对应点对,此方法将刚性运动一致性与几何特征不变性相结合以提高确立对应点集的正确率;对最终确立的对应点集,使用最小二乘法进行坐标变换迭代求解。
2.针对三维网格法与曲率精简法的特点,根据实际工程应用中的需求,提出并实现了一种将基于八叉树的非均匀网格精简法与基于B样条曲面拟合的曲率精简法相结合的二次精简算法。
3.根据理论研究成果,在WindowsXP平台上采用MicrosoftVisualC++6.0和OpenGL进行了系统集成开发。
实验结果表明,数据拼接方面,本课题提出的改进ICP算法可以有效地提高确立对应点集的正确率,从而极大地提高了数据拼接的精度。经本算法拼接后的点云不仅具有较小的拼接误差均值与标准差,而且在重叠区域均匀交叉渗透,拼接误差在空间上均匀分布。数据精简方面,本文提出的二次精简算法可在有效保留曲面关键特征的同时达到较高的精简率,并且拥有较好的计算效率。
本文的创新之处在于,数据拼接方面,提出了一种新的基于B样条曲面拟合的精确拼接ICP算法;提出了“辅助点对”约束,并结合曲率约束去除错误对应点对。数据精简方面,提出了将非均匀网格法与曲面曲率法相结合的二次精简算法。
6.学位论文黄小平逆向工程中数据云处理关键技术研究2002
该文主要研究了逆向工程中与数据云处理相关的若干关键技术,包括:多视数据拼合、数据分割、特征参数估计以及测量点与曲面的轮廓误差评定等问题.其中很多问题在本质上类似的,为此该文提出用相应的距离函数来描述其中的共性问题.提出改进的ICP算法,用于对从多个不同视点测量得到的数据云进行拼合.原ICP算法用于拼合问题时,未考虑海量数据的拓扑关系,在拼合效率以及精度上都难以满足实际机械零件设计的要求.新算法基于三角网格,并能够有效解决原ICP算法存在的微观局部优化问题,相比原算法,在计算复杂度和拼合精度上都有着显著改进,成为实用的处理海量数据拼合的方法.
7.期刊论文戴静兰.陈志杨.叶修梓.DAI Jing-lan.CHEN Zhi-yang.YE Xiu-zi ICP算法在点云配准中的应用-中国
图象图形学报2007,12(3)
逆向工程中经常需要把多次测量得到的点云进行配准.提出了一种基于特征点的改进ICP算法,在采用主方向贴合法实现初始配准的基础上,使用曲率特征点和k-d tree寻找最近点,提高了ICP算法的效率.该算法具有速度快精确度高的特点,并且在实际应用中验证了配准效果和算法稳定性.
8.学位论文陈楚基于激光扫描的深度影像配准方法的研究2005
激光三维扫描技术能够快速、精确、无接触的完成复杂物体表面的重构。这一技术正以其的特有的优势被广泛的应用在CAD逆向工程、计算机视觉、模式识别、三维动画、网上购物和虚拟现实等领域。
本文研究了连续多幅激光扫描影像的配准问题。文章介绍了有关三维激光扫描技术的发展过程,并阐述了运用激光扫描的深度影像进行建模的一般过程。重点分析了各种理论和技术的优缺点,并通过各类算法的归纳总结和集中经典算法的实验比较理解深度图像配准的实质和关键问题,提出了一种基于ICP的能达到一定速度和精确度的改进配准算法。
9.学位论文方新零件逆向工程中的精度控制研究2006
本文以零件逆向工程为研究对象,研究影响零件逆向工程精度的相关因素。本文从工程实际出发,以经过反求设计与制造的零件可直接应用于生产一线为目标,对零件反求设计与制造中的精度控制问题进行了深入和系统的研究,重点研究了复杂内腔零件采用工业CT方式测量的数据采集与处理,以及含自由曲面的零件采用激光扫描方式测量的数据采集、数据处理、三维模型重构及反求制造的精度问题,提出了一些新的思路和方法,并用实例进行了验证。论文主要内容和成果如下:
研究了零件原型数据采集的精度控制问题,提出了用工业CT技术对复杂内腔零件进行断层测量的特征采样法,通过截面采样和路径采样获得零件的特征信息,有助于提高测量效率和测量精度。针对激光三角法测量存在的问题,本文提出了零件自由曲面测量的表面喷涂、确定多视对齐特征、确定扫描方向的测量规划。
研究了零件原型数据处理的精度控制问题,对用工业CT技术采集的零件原型断层截面数据进行矢量化处理,提出有效提高零件原型断层截面图像信噪比,增强其边缘信息,又提高滤波速度的分级加权滤波法;提出可对零件原型断层截面二值图像进行快速亚像素级轮廓线提取的单元提取法;采用基于曲率累加线的方法检测轮廓线特征点。对采用激光三角法扫描测量获得的零件数据点云,采用基于空间点、直线、平面、圆、球面等局部特征的多视对齐法,对齐精度高、速度快;对于基于三个基准点的多视对齐,给出了减少误差的三个基准点选择原则。
研究了零件基本特征重构和自由曲面重构的精度控制问题。对于零件特征重构,提出了根据零件基本特征生成特性从零件约束优化模型中提取拉伸运动路径和旋转轴的方法,给出了建立零件基本特征局部坐标系与创建基本特征截平面的的原则,从而减少了零件三维模型重构的误差。对于零件自由曲面重构,针对激光三角法扫描测量获得的零件点云比较密集的特点,采取了先用三次均匀B样条曲线进行插值,然后用三次均匀B样条插值函数计算特征点曲率的方法,减少了局部测量数据误差的影响;对于特征点的提取采用根据偏差阈值和曲率双判断的方法,对于复杂特征线则采用分段拟合的方法,以保证精度要求。
研究了在零件反求制造环节控制精度的方法,提出了利用遗传算法与ICP算法的各自优点实现两步法建立精度检测基准,以实现反求制造误差的检测。
本文根据上述研究反求设计与制造出的手机检具与涡轮增压器叶轮已经应用于生产实际中。
10.期刊论文冯祖军.朱冒冒.姜振春.鞠鲁粤复杂曲面数字化检测方法的研究-机械与电子2004(12)
讨论了对已有CAD模型的复杂曲面的数字化检测方法,提出了重定位基准点的选择法则和对被测曲面的点云与CAD模型的对齐问题,即先对点云进行粗定位,然后利用一种改进的ICP算法对点云进行精确定位,最后提出了点到曲面的最小距离的算法,从而对复杂曲面进行数字化检测.
本文链接:https://www.360docs.net/doc/ea7030024.html,/Periodical_jxsjyyj200901001.aspx
下载时间:2010年5月10日
理工大学数据仓库与数据挖掘实验一
昆明理工大学信息工程与自动化学院学生实验报告 (2012 —2013 学年第 1 学期) 课程名称:数据库仓库与数据挖掘开课实验室: 2012 年10月 30日 一、上机目的 1.理解数据库与数据仓库之间的区别与联系; 2.掌握典型的关系型数据库及其数据仓库系统的工作原理以及应用方法; 3.掌握数据仓库建立的基本方法及其相关工具的使用。 二、上机内容 内容:以SQL Server为系统平台,设计、建立数据库,并以此为基础创建数据仓库。 要求:利用实验室和指导教师提供的实验软件,认真完成规定的实验项目,真实地记录实验中遇到的各种问题和解决的方法与过程,并绘出模拟实验案例的数据仓库模型。实验完成后,应根据实验情况写出实验报告。 三、所用仪器、材料(设备名称、型号、规格等或使用软件) 1台PC及SQL 2008软件 四、实验方法、步骤和截图(或:程序代码或操作过程) 采用SQL语句创建数据库,数据库命名为:DW。如图所示:
DW数据库中包含7张维表和一张事实表。7张维表分别为:订单方式维表、销售人员及销售地区维表、发货方式维表、订单日期维表、客户维表、订单状态维表、客户价值维表。建立7张维表语句和建立7张维表的ETL如下: 语句执行成功的结果如图所示:
DW数据库包含的事实表为FACT_SALEORDER。建立1张事实表语句和建立1张事实表的ETL如下: 三、建事实表 CREATE TABLE FACT_SALEORDER( SALEORDERID INT, TIME_CD V ARCHAR(8), STATUS INT, ONLINEORDERFLAG INT, CUSTOMERID INT, SALESPERSONID INT, SHIPMETHOD INT, ORDER_V ALUES INT, SUBTOTAL DECIMAL(10,2), TAXAMT DECIMAL(10,2), FREIGHT DECIMAL(10,2)) ----------------------------------- 四、事实表的ETL /* FACT_SALEORDER的ETL*/ TRUNCATE TABLE FACT_SALEORDER INSERT INTO FACT_SALEORDER SELECT SalesOrderID,CONVERT(CHAR(8),,112) , ,,ISNULL,0),ISNULL,0),,,,, FROM A, V_SUBTOTAL_V ALUES B WHERE >= AND <
Word教程:段落格式设置:首行左右悬挂缩进及五种对齐方式
Word教程:段落格式设置:首行左右悬挂缩进及五种对齐方 式 嗨,各位亲,见面么么哒~~~前面的课程中李老师带大家学习了一个重要的知识点:Word文本格式的设置。相信各位小伙伴们都已经学会了吧?但是你知道吗?一个常规文 件的制作,除了要用到文本格式的设置外,段落格式的设置也很重要哦~~~那今天李老师就带大家学习文件制作中另一个重要的知识点——Word段落格式设置。一起来学习吧!一、Word常规段落格式设置要学习段落的格式,首先我们要明白一个问题:什么是段落?直观的讲,在WORD中,有弯箭头标志的就是一个段落。如下图:怎么产生一个段落呢?很简单,敲键盘上的“ENTER”键就可以了!说到这里,有的伙伴可能有问题:为什么我的文档中没有这个段落标记呢?好吧,这就是我们今天要学习的第一个操作:段落标记的显示和隐藏。显示段落标记操作:执行文件?选项?显示,勾选“段落标记”就可以了。如下图隐藏段落标记操作:在上图中取消段落标记的勾选即可。好,明白了段落的概念了以后,接下来我们就来学习段落的常规格式设置。1.Word段落对齐段落的对齐方式包括5种:左对齐、居中、右对齐、两端对齐、分散对齐。设置方法有以下三种:(1)利用“开始”选项卡“段落”功能区中的对齐按钮进行对齐操作。(2)利
用段落对话框进行对齐操作。单击“段落”功能区右下角的按钮,弹出段落对话框,在对话框中可以进行对齐操作。(3)利用快捷键进行Word对齐操作。a)Word左对齐快捷键:CTRL+Lb)Word居中快捷键:CTRL+Ec)Word右对齐快捷键:CTRL+Rd)Word两端对齐快捷键:CTRL+Je)Word分散对齐快捷键:CTRL+SHIFT+J2.Word段落缩进缩进?听起来很诡异的样子,呵呵……简单说来,缩进可以控制段落中的文本与正文边框之间的距离。“呃?”又出现了一个新名词,正文边框?是咩东东?看下图:看到了吗?工作区中的那个虚线框就是正文边框。它可是今天的小助教哦,能帮助大家更直观地了解段落缩进的作用。各位小伙伴的工作区里面一般都不显示正文边框的,我们可以把它显示出来。执行:文件?选项?高级,勾选“显示正文边框”,就OK啦!好,准备工作都做好了以后,我们再来看这个:小伙伴们看懂了吗?Word段落缩进分成左缩进、右缩进、首行缩进、悬挂缩进四种。左、右缩进控制的是整个段落的左边和右边;首行缩进控制的是段落第一行的文本;悬挂缩进控制的是段落除第一行外的其它行。Word段落缩进的设置方法:(1)右击鼠标,选择“段落”命令,打开段落对话框,进行设置。(2)利用标尺:拖动标尺上相应的缩进控制块就可以了!
点云数据处理
c++对txt文件的读取与写入/* 这是自己写程序时突然用到这方面的技术,在网上搜了一下,特存此以备后用~ */ #include
云计算大数据实验室建设解决方案
云计算大数据实验室建设解决方案 云计算大数据实验室建设解决方案
目录 概述 (4) 第一章、云计算与大数据的发展趋势 (4) 1.1.云计算与大数据 (4) 1.2.云计算与大数据的关系 (5) 1.2.1.当大数据遭遇云计算 (5) 1.2.2.云计算环境作为大数据处理平台 (6) 1.3.发展趋势:大数据逐步“云”化 (7) 第二章、云计算大数据人才现状分析 (9) 2.1.我国云计算大数据人才紧缺 (9) 2.2.云计算大数据人才培养情况 (9) 2.3.云计算大数据人才培养面临的问题 (10) 2.3.1.高职实验室设备落后,教学资源无法合理分配 (11) 2.3.2.教学资源分散,共享程度低 (11) 2.3.3.对云计算大数据技术认识不够,无法有效运用 (11) 第三章、云计算大数据人才培养需求分析 (12) 3.1.云计算大数据岗位需求 (12) 3.2.云计算大数据人才培养策略 (13) 3.2.1.根据就业前景,加大人才培养力度 (13) 3.2.2.德才兼修,开拓新型教学方式 (13) 3.2.3.选择以工作过程为向导的教材 (13) 3.3.云计算大数据带给高职实验室建设的前景 (14) 3.3.1.建立统一信息平台来管理海量教学资源 (14) 3.3.2.云计算降低维护和运营成本 (14) 3.3.3.整合教学资源,加强资源共享,提高教学质量 (15) 3.3.4.促进教师和学生的信息交互,进一步促进教学相长 (15) 3.3.5.借助云计算大数据技术可以提升科研实力 (15) 第四章、云计算大数据实验室建设原则 (16) 4.1.方便扩展 (16)
数据库查询方法
数据查询(检索) 一、简单查询(单张表) 字段筛选输出全部列select * select 输出部分列select 列名… 记录筛选比较运算符> < = != !> !< >= <= <> Where 逻辑运算符and or 范围运算符Between小值and 大值 列表运算符In(值1,值2,….) 模糊匹配运算符Like ‘通配表达式’ 空值运算符is null 关键字辅助distinct select distinct 列名… Top select top n 列名… 二、高级查询(多张表) 一、简单查询 1、基本语法格式 结合实现的查询功能 1)输出表的全部列(全部行、列) 查找所有客户的基本信息(查看客户信息表) use spgl go select客户编号,客户姓名,联系电话,地址,邮箱 from客户信息表
use spgl go select* from客户信息表
2)输出表的部分列 查找所有客户的姓名(查看客户信息表的姓名列) select客户姓名 from客户信息表 查找所有商品的编号(查看商品信息表的商品编 号列) select商品编号 from商品信息表
3)输出表中满足条件的记录 --查找所有单位是“个”的商品的编号(查看商品信息表的商品编号列)select商品编号 from商品信息表 where商品单位='个'
查找11110001商品的销售信息(查看销售信息表 的商品编号为指定值的这些行,相当于进行条件 筛选) select* from销售信息表 where商品编号=11110001
--查找11110001和11110003商品的销售信息select* from销售信息表 where商品编号=11110001 or商品编号=11110003
三维点云数据处理的技术研究
三维点云数据处理的技术研究 中国供求网 【摘要】本文分析了大数据领域的现状、数据点云处理技术的方法,希望能够对数据的技术应用提供一些参考。 【关键词】大数据;云数据处理;应用 一、前言 随着计算机技术的发展,三维点云数据技术得到广泛的应用。但是,受到设备的影响,数据获得存在一些问题。 二、大数据领域现状 数据就像货币、黄金以及矿藏一样,已经成为一种新的资产类别,大数据战略也已上升为一种国家意志,大数据的运用与服务能力已成为国家综合国力的重要组成部分。当大数据纳入到很多国家的战略层面时,其对于业界发展的影响那是不言而喻的。国家层面上,发达国家已经启动了大数据布局。2012年3月,美国政府发布《大数据研究和发展倡议》,把应对大数据技术革命带来的机遇和挑战提高到国家战略层面,投资2亿美元发展大数据,用以强化国土安全、转变教育学习模式、加速科学和工程领域的创新速度和水平;2012年7月,日本提出以电子政府、电子医疗、防灾等为中心制定新ICT(信息通讯技术)战略,发布“新ICT计划”,重点关注大数据研究和应用;2013年1月,英国政府宣布将在对地观测、医疗卫生等大数据和节能计算技术方面投资1(89亿英镑。 同时,欧盟也启动“未来投资计划”,总投资3500亿欧元推动大数据等尖端技术领域创新。市场层面上,美通社发布的《大数据市场:2012至2018年全球形势、发展趋势、产业
分析、规模、份额和预测》报告指出,2012年全球大数据市场产值为63亿美元,预计2018年该产值将达483亿。国际企业巨头们纷纷嗅到了“大数据时代”的商机,传统数据分析企业天睿公司(Teradata)、赛仕软件(SAS)、海波龙(Hy-perion)、思爱普(SAP)等在大数据技术或市场方面都占有一席之地;谷歌(Google)、脸谱(Facebook)、亚马逊(Amazon)等大数据资源企业优势显现;IBM、甲骨文(Oracle)、微软(Microsoft)、英特尔(Intel)、EMC、SYBASE等企业陆续推出大数据产品和方案抢占市场,比如IBM公司就先后收购了SPSS、发布了IBMCognosExpress和InfoSphereBigInsights 数据分析平台,甲骨文公司的OracleNoSQL数据库,微软公司WindowsAzure 上的HDInsight大数据解决方案,EMC公司的 GreenplumUAP(UnifiedAnalyticsPlat-form)大数据引擎等等。 在中国,政府和科研机构均开始高度关注大数据。工信部发布的物联网“十二五”规划上,把信息处理技术作为四项关键技术创新工程之一提出,其中包括了海量数据存储、数据挖掘、图像视频智能分析,这都是大数据的重要组成部分,而另外三项:信息感知技术、信息传输技术、信息安全技术,也都与大数据密切相 关;2012年12月,国家发改委把数据分析软件开发和服务列入专项指南;2013年科技部将大数据列入973基础研究计划;2013年度国家自然基金指南中,管理学部、信息学部和数理学部都将大数据列入其中。2012年12月,广东省启了《广东省实施大数据战略工作方案》;北京成立“中关村大数据产业联盟”;此外,中国科学院、清华大学、复旦大学、北京航空航天大学、华东师范大学等相继成立了近十个从事数据科学研究的专门机构。中国互联网数据中心(IDC)对中国大数据技术和服务市场2012,2016年的预测与分析指出:该市场规模将会从2011年的7760万美元增长到2016年的6。17亿美元,未来5年的复合增长率达51(4%,市场规模增长近7倍。数据价值链和产业链初显端倪,阿里巴巴、百度、腾
《第八课 设置段落的对齐方式》教学设计
《第八课设置段落的对齐方式》教学设计 一、教材分析 段落的对齐方式是排版打印必须考虑的问题。按照中文的行文格式一般正文应该首行空两个格、两端对齐、标题应居中,这是学生应该重点掌握的内容。左对齐教材虽然没有讲,但也应该让学生掌握,特别是左对齐与两端对齐的效果,不仔细看没有明显的区别,学生不易理解。所以本课的重难点确定如下: 重点:首行缩进、两端对齐和居中。 难点:左对齐与两端对齐的区别。 分散对齐,在中文写作中用的不多,让学生了解就可以了。文章的用途不同,选择的对齐方式就不同,所以每种对齐方式会产生什么效果,还是应该让学生实际试一试,看一看。对不同的对齐方式有所了解,在 以后使用时才知道应该选用哪种对齐方式。 教材中是以工具栏的使用为主来传授知识的,是对大多数学生的普遍要求。对于程度较好的学生,应该学 会利用菜单来设置文章的对齐方式。 二、学生分析 通过前面几课的学习,学生已经认识了Word,会在Word中写文章。可以对文字进行删除、移动、复制等编辑操作和改变字体、字号、字型等文字格式的操作。段落格式的设置,上一节才刚刚接触,所以头脑中对段落格式设置的知识印象不深。但是对齐方式的设置,与上一节左右缩进的设置方法基本相同,只是选择的工具不同,所以可以通过知识的迁移,来学习Word中段落格式的设置,把学习新知识变成对旧知识 的迁移,这样就容易多了。 三、教学目标 知识与技能目标:了解文字的对齐方式的种类,能熟练进行相应的设置操作。 过程与方法目标:通过实际操作,对学生进行动手能力、探知能力的培养。 情感态度与价值观目标:让学生体验Word的文字处理的强大功能与魅力,提高审美能力。 四、教学准备 硬件资源准备:多媒体教学网络教室。 软件资源准备;Offfice2000办公软件,教室中没有多媒体的,可以安装Net meeting通讯工具,用它的的 共享桌面功能进行教学演示。 素材资源准备:Word文本文件:《悯农》或一篇段落较多的文章。 五、教学过程 教学建议 由于段落的对齐方式设置与缩进的设置方法相同,建议借鉴上一节课段落缩进方式的设置方法,以研究性学习为主。由学生和教师共同提出问题,教师和学生借鉴以往的经验,研究探索一种对齐方式的设置。然后学生充分运用教学资源,小组协作或自主探究,通过知识的迁移来学习其它几种段落对齐方式的设置。 (一)情景导入激发兴趣 教师出示一篇没有进行格式设置的文章(全部左对齐,没有首行缩进并且很宽)请学生进行左右缩进设置 和首行缩进设置,并且边演示边叙述操作步骤。 提问学生:调整段落缩进方式时,应注意什么问题?怎样把标题放在行的中间?学生可能会用空格键把标题居中也可能直接说出用居中按钮,这样就可以进入新课了。调整段落的缩进方式时,要把插入条(即光标)定位在当前段,这也是设置对齐方式要注意的问题。也为新课的学习扫清了障碍。 (二)任务驱动明确问题 把标题放在中间,除了用空格键还有没有更好的办法呢?我们完全可以通过设置它的对齐方式来实现。 任务1:设置标题居中。 任务2:设置段落两端对齐。 任务3:设置段落右对齐。
数据仓库与数据挖掘试题
武汉大学计算机学院 2014级研究生“数据仓库和数据挖掘”课程期末考试试题 要求:所有的题目的解答均写在答题纸上,需写清楚题目的序号。每张答题纸都要写上姓名和学号。 一、单项选择题(每小题2分,共20分) 1. 下面列出的条目中,()不是数据仓库的基本特征。B A.数据仓库是面向主题的 B.数据仓库是面向事务的 C.数据仓库的数据是相对稳定的 D.数据仓库的数据是反映历史变化的 2. 数据仓库是随着时间变化的,下面的描述不正确的是()。 A.数据仓库随时间的变化不断增加新的数据内容 B.捕捉到的新数据会覆盖原来的快照 C.数据仓库随事件变化不断删去旧的数据内容C D.数据仓库中包含大量的综合数据,这些综合数据会随着时间的变化不断地进行重新综合 3. 以下关于数据仓库设计的说法中()是错误的。A A.数据仓库项目的需求很难把握,所以不可能从用户的需求出发来进行数据仓库的设计,只能从数据出发进行设计 B.在进行数据仓库主题数据模型设计时,应该按面向部门业务应用的方式来设计数据模型 C.在进行数据仓库主题数据模型设计时要强调数据的集成性 D.在进行数据仓库概念模型设计时,需要设计实体关系图,给出数据表的划分,并给出每个属性的定义域 4. 以下关于OLAP的描述中()是错误的。A A.一个多维数组可以表示为(维1,维2,…,维n) B.维的一个取值称为该维的一个维成员 C.OLAP是联机分析处理 D.OLAP是数据仓库进行分析决策的基础 5. 多维数据模型中,下列()模式不属于多维模式。D A.星型模式 B.雪花模式 C.星座模式 D.网型模式 6. 通常频繁项集、频繁闭项集和最大频繁项集之间的关系是()。C A.频繁项集?频繁闭项集?最大频繁项集 B.频繁项集?最大频繁项集?频繁闭项集 C.最大频繁项集?频繁闭项集?频繁项集 D.频繁闭项集?频繁项集?最大频繁项集
SQL数据库快捷键大全
快捷键·F5 这个恐怕是最常用的快捷键了,用来代替那个“!执行”按钮,写完SQL语句后手不用离开键盘。虽然没什么技术含量,但不会用的人八成是菜鸟。 快捷键·CTRL+C/V 复制/粘贴。COPY流程序员神器,安全环保无污染。不多说,只会右键的同学直接定性为菜鸟。MS所有文本编辑器通用。 快捷键·↑↓←→ 上下左右。功能全人类都知道。另外据验证,在SSMS启动时快速输入↑↑↓↓←→←→BABA没有加30条命效果。MS所有文本编辑器通用。 快捷键·SHIFT+↑↓←→ 移动的同时选中移动范围内的代码,配合F5和其它命令用。MS所有文本编辑器通用。 快捷键·CTRL+↑↓ 不移动光标,上下滑动查询窗口。效果等同按竖行滑动条拖。全键盘流同学和装B流同学可用。 快捷键·CTRL+←→ 行内跳词移动光标。自己写个SELECT * FROM TB再试试这个就知道了。MS所有文本编辑器通用。 快捷键·CTRL+A 全选所有文本。用来清空编辑界面,或复制本界面全部语句时常用。MS所有文本编辑器通用。 快捷键·HOME/END 光标移动至本行首/尾。使用以下连招可选中本行文字:HOME -- SHIFT+END 或END -- SHIFT+HOME。MS所有文本编辑器通用。 快捷键·CTRL+HOME/END 光标移动至全文首/尾。按住CTRL加上面那个连招能选中所有文字,效果同CTRL+A。另外在浏览超长SQL时,用滚轮会慢,用CTRL+END看最后一行的内容比较快。MS所有文本编辑器通用。 快捷键·TAB 不选中文本或选中部分文本时是添加一个制表符,选中整行或多行代码时按下是全部增加缩进。 快捷键·SHIFT+TAB 不选中整行时无效果,选中整行或多行代码时是全部减少缩进。和上面那个功能一起练熟多用能让代码更有层次感。
陕西省大数据与云计算产业示范工程实施方案
陕西省大数据与云计算产业示范工程 实施方案
陕西省大数据与云计算产业示范工程实施方案 为贯彻落实《国务院关于印发促进大数据发展行动纲要的通知》(国发〔〕50号),结合《陕西省大数据与云计算产业五年行动计划》(陕政发〔〕22号)要求,制订本实施方案。 一、工作思路和发展目标 (一)工作思路。利用两年时间,经过示范工程带动,探索总结大数据“汇聚、开放、交易”规则,把握大数据产业发展规律,促使我省大数据产业生态体系不断完善。 (二)发展目标。到底,经过四大工程实施,形成具备产业支撑能力的增长点和明晰的发展方向,西咸新区成为国家级大数据与云计算产业基地。引进5家以上国内外有影响力的大数据龙头企业,引进10家以上国家部委数据中心,培育壮大一批产业关键环节骨干企业,其中规模以上企业超100家。 二、四大示范工程 围绕云计算服务、信息融合、大数据应用、产业基地建设等产业链关键环节,组织实施秦云、城市信息融合示范、大数据应
用示范、产业基地示范等四大工程,引导和推动数据汇集、企业云集、产业聚集。 (一)秦云工程。 启动建设“N+1”云工程(N即15朵行业云,1即大数据交换共享平台),建设15朵行业云,引导带动政府部门、企业和社会购买云服务,推动数据公开及社会化开发利用。建设大数据交换共享平台,实现各行业云的数据交换共享,并与省信息化中心互联互通。各行业云按照政府数据开放和共享的要求向社会公众和产业链开放,带动软硬件提供商、运营商及平台服务商等产业链上下游整体发展。到底,带动大数据相关产业实现产值50亿元以上。 1. 工业云。继续推进陕西工业云建设,提供云资源、云智慧、云应用、高性能计算、工业协同设计五大类服务。(省工业和信息化厅负责) 2. 工商云。整合三证合一、法人单位、企业信用信息公示、广告监测等信息平台和系统,建立工商大数据,实现一体化市场准入、市场监管,强化市场主体的服务与监管。(省工商局负责)
数据处理点云处理
非接触三维扫描测量数据的处理研究 1 点云数据的处理 1.1 噪声点的剔除和失真点的查找.在非接触三维扫描测量过程中,受测量方式、被测量物体材料性质、外界干扰等因素的影响,不可避免地会产生误差很大的点(噪声点)和失真点(跳点).因此在数据处理的第一步,就应利用相关专用软件所提供的去噪声点功能除去那些误差大的噪声点和找出可能存在的失真点[3].失真点的查找需要一定的技巧和经验,下面介绍3种方法供大家参考:①直观检查法.通过图形显示终端,用肉眼直接将与截面数据点集偏离较大的点或存在于屏幕上的孤点剔除.这种方法适合于数据的初步检查,可从数据点集中筛选出一些比较大的异常点.②曲线检查法.通过截面的首末数据点,用最小二乘法拟合得到一条样条曲线,曲线的阶次可根据曲面截面的形状决定,通常为3~4阶,然后分别计算中间数据点pi到样条曲线的距离‖e‖,如果‖e‖大于等于[ε]([ε]为给定的允差),则认为pi是坏点,应予以剔除(见图1).③弦高差方法.连接检查点的前后2点,计算中间数据点pi到弦的距离‖e‖,如果‖e‖ [ε]([ε]为给定的允差),则认为pi是坏点,应予以剔除.这种方法适合于测量点均匀且较密集的场合,特别是在曲率变化较大的位置(见图2). 图1 曲线检查法剔除坏点 图2 弦高差方法 1.2 数据精简.非接触三维扫描测量的突出特点是点云十分密集,数据量极其庞大(在1m2的范围内有数十万个点).若将如此庞大的数据量直接用于曲面构建不仅需要巨大的计算机资源(普通微机可能无法胜任)和很长的计算时间,而且整个处理过程也将变得难以控制,更何况并非所有的测试数据对曲面的构建都有用.因此,有必要在保证一定精度的前提下,对测试数据进行精简.数据精简的原则是在扫描曲率较大的地方保持较多的数据点,在曲率变化较小的地方保持较少的数据点.不同类型的点云采用不同的精简方式.散乱点云可通过随机采样的方法来精简,而对于扫描线点云和多边形点云可采用等间距、倍率、等量及弦偏差等方法进行精减.此外均匀网格法与非均匀网格法也可用来精减点云数据.其中均匀网格法只需选取其中的某些点,无需改变点的位置,可以很好地保留原始数据,特别适合简单零件表面瑕点的快速剔除.由于均匀网格法没有考虑被测物体的表面形状特征,因此它不适合对形状复杂的重要工程部件测试数据的处理.与之相反,非均匀网格法可以根据被测工程部件外部形状特征的实际需要来确定网格的疏密,因此它可在保证后继曲面构建精度的前提下减少数据量,这在处理尺寸变化较大的自由形体方面显得十分有效. 1.3 数据的平滑处理.点云数据中的随机误差将影响到后续曲面的构建及生成三维实体模
WORD文档段落属性设置常数一览
WORD文档段落属性设置常数一览 编辑:madmlwt 一、段落对齐方式Alignment 属性常量及赋值一览 常量名称描述赋值 wdAlignParagraphCenter居中 1 wdAlignParagraphDistribute分散对齐 4 wdAlignParagraphJustify等同效果左对齐 3 wdAlignParagraphJustifyHi等同效果左对齐7 wdAlignParagraphJustifyLow等同效果左对齐8 wdAlignParagraphJustifyMed等同效果左对齐 5 wdAlignParagraphLeft左对齐(两端对齐) 0 wdAlignParagraphRight右对齐 2 wdAlignParagraphThaiJustify等同效果左对齐9 说明 由于您选择或安装的语言支持(例如,英语(美国))不同,上述部分常量可能无法使用。 二、应用实例 把WORD文档的第一段落(标题)进行格式(字体和对齐)设置。 1.直接在WORD文档中应用 Sub 段落设置() With ActiveDocument.Paragraphs(1).Range .Bold = True '将标题设为粗体 .ParagraphFormat.Alignment = wdAlignParagraphCenter '标题居中 https://www.360docs.net/doc/ea7030024.html, = "隶书" '标题字体 .Font.Size = 18 '标题字号
End With End Sub 2.在EXCEL中操作WORD文档 Sub 段落设置() Application.ScreenUpdating = False '关闭屏幕刷新 dqM = ThisWorkbook.Path & "\操作WORD表格.doc" '要打开的WORD文件Set wdWORD = CreateObject("Word.Application") '定义一个Word对象变量Set wdDOC = wdWORD.Documents.Open(dqM) '创建文档对象 With wdWORD With .ActiveDocument.Paragraphs(1).Range'确定第一个段落对象 .Font.Size = 18 '字号 https://www.360docs.net/doc/ea7030024.html, = "隶书" '字体 .Font.Bold = True '加粗 .ParagraphFormat.Alignment = 1 '水平居中 End With .ActiveDocument.SaveAs'保存修改 .Quit '关闭窗口 End With Set wdDOC = Nothing '释放存储空间 Set wdWORD = Nothing '释放存储空间 Application.ScreenUpdating = False '关闭屏幕刷新 End Sub 说明: 本代码采用后期绑定,不必在对象库中去勾选Microsoft Word 11.0 Object Library对象。所以段落的水平居中代码用值1替代了wdAlignParagraphCenter 常量。 下一篇请关注《WORD 文档内置属性设置常数一览》
数据挖掘与数据库技术
一、填空题 1.OLAP服务器可以使用关系OLAP、或混合OLAP。 2.多维数据模型通常以三种形式存在,他们是星形模式、和事实星座形模式。3.聚类中每个训练元组的类标号是未知的,属于学习。 4.层次聚类方法可进一步分为:和分裂层次聚类。 5.数据挖掘的聚类方法中,典型的基于划分方法的聚类算法有和k中心点方法。6.关联规则的挖掘可以看作两步的过程:首先找出所有,然后生成强关联规则。7.多维数据模型通常以三种形式存在,他们是星形模式、雪花形模式和。 8.层次聚类方法可进一步分为:凝聚层次聚类和。 9.数据挖掘的聚类方法中,典型的基于划分方法的聚类算法有k均值方法和。10.强关联规则满足最小支持度和。 11.数据仓库是面向主题的、、时变的和非易失的有组织的数据集合,支持管理决策。12.OLAP服务器可以使用关系OLAP、多维OLAP或。 二、简答题: 1.什么是数据挖掘,简述数据挖掘功能。 2.数据预处理的主要任务有哪些? 3.为什么不直接对操作数据库进行联机分析,而建立分离的数据仓库。 4.简述有哪些Apriori算法的变形方法可提高Apriori算法的效率? 5.简述数据仓库的定义,并论述其关键特征。 6.为什么需要预处理数据。 7.操作数据库系统与数据仓库的区别? 8.简述决策树分类方法的关键步骤。 三、计算题 1. 给定两个对象,分别用元组(26,10,23,8),(22,7,25,7)表示。 a)计算两个对象之间的欧几里德距离; b)计算两个对象之间的曼哈顿距离; 2.假设15个销售价格记录已经排列如下: 4,6,12,15,18,30,35,37,40,48,92,95,145,156,157 a) 使用等频(等深)划分方法将它们划分为三个箱; b) 分别用箱均值、箱边界光滑。 3. 给定两个对象,分别用元组(33,8,38,6),(28,6,35,8)表示。 c)计算两个对象之间的欧几里德距离;
最新数据仓库与数据挖掘--课后答案-(陈志泊-著)-清华大学出版社
第1章数据仓库的概念与体系结构 1.数据仓库就是一个面向主题的、集成的、相对稳定的、反映历史变化的数据集合。 2.元数据是描述数据仓库内数据的结构和建立方法的数据,它为访问数据仓库提供了一个信息目录,根据元数据用途的不同可将数据仓库的元数据分为技术元数据和业务元数据两类。 3.数据处理通常分成两大类:联机事务处理OLTP和联机分析处理OLAP。 4.多维分析是指对以“维”形式组织起来的数据(多维数据集)采取切片(Slice)、切块(dice)、钻取(Drill-down 和Roll-up 等)和旋转(pivot)等各种分析动作,以求剖析数据,使用户能从不同角度、不同侧面观察数据仓库中的数据,从而深入理解多维数据集中的信息。 5. ROLAP是基于关系数据库的OLAP实现,而MOLAP是基于多维数据结构组织的OLAP实现。 6.数据仓库按照其开发过程,其关键环节包括数据抽取、数据存储与管理和数据表现等。 7.数据仓库系统的体系结构根据应用需求的不同,可以分为以下4种类型:两层架构、独立型数据集市、依赖型数据集市和操作型数据存储、逻辑型数据集市和实时数据仓库。 8.操作型数据存储实际上是一个集成的、面向主题的、可更新的、当前值的(但是可“挥发”的)、企业级的、详细的数据库,也叫运营数据存储。 9.“实时数据仓库”意味着源数据系统、决策支持服务和数据仓库之间以一个接近实时的速度交换数据和业务规则。 10.从应用的角度看,数据仓库的发展演变可以归纳为5个阶段:以报表为主、以分析为主、以预测模型为主、以营运导向为主、以实时数据仓库和自动决策为主。 11.什么是数据仓库?数据仓库的特点主要有哪些? 答:数据仓库就是一个面向主题的(Subject Oriented)、集成的(Integrate)、相对稳定的(Non-Volatile)、反映历史变化(Time Variant)的数据集合,通常用于辅助决策支持。 数据仓库的特点包含以下几个方面:(1)面向主题。操作型数据库的数据组织是面向事务处理任务,各个业务系统之间各自分离;而数据仓库中的数据是按照一定的主题域进行组织。主题是一个抽象的概念,是指用户使用数据仓库进行决策时所关心的重点领域,一个主题通常与多个操作型业务系统或外部档案数据相关。(2)集成的。面向事务处理的操作型数据库通常与某些特定的应用相关,数据库之间相互独立,并且往往是异构的。而数据仓库中的数据是在对原有分散的数据库数据作抽取、清理的基础上经过系统加工、汇总和整理得到的,必须消除源数据中的不一致性,以保证数据仓库内的信息是关于整个企事业单位一致的全局信息。也就是说存放在数据仓库中的数据应使用一致的命名规则、格式、编码结构和相关特性来定义。(3)相对稳定的。操作型数据库中的数据通常实时更新,数据根据需要及时发生变化。数据仓库的数据主要供单位决策分析之用,对所涉及的数据操作主要是数据查询和加载,一旦某个数据加载到数据仓库以后,一般情况下将作为数据档案长期保存,几乎不再做修改和删除操作,也就是说针对数据仓库,通常有大量的查询操作及少量定期的加载(或刷新)操作。(4)反映历史变化。操作型数据库(OLTP)主要关心当前某一个时间段内的数据,而数据仓库中的数据通常包含较久远的历史数据,因此总是包括一个时间维,以便可以研究趋势和变化。数据仓库系统通常记录了一个单位从过去某一时点(如开始启用数据仓库系统的时点)到目前的所有时期的信息,通过这些信息,可以对单位的发展历程和未来趋势做出定量分析和预测。 12. 简述数据仓库4种体系结构的异同点及其适用性。 答:(1)两层架构(Generic Two-Level Architecture)。 (2)独立型数据集市(Independent Data Mart)。 (3)依赖型数据集市和操作型数据存储(Dependent Data Mart and Operational Data Store)。 (4)逻辑型数据集市和实时数据仓库(Logical Data Mart and Real-Time Data Warehouse)。 13. 答:数据仓库技术的发展包括数据抽取、存储管理、数据表现和方法论等方面。在数据抽取方面,未来的技术发展将集中在系统集成化方面。它将互连、转换、复制、调度、监控纳入标准化的统一管理,以适应数据仓库本身或数据源可能的变化,使系统更便于管理和维护。在数据管理方面,未来的发展将使
点云滤波方法
点云滤波方法-CAL-FENGHAI.-(YICAI)-Company One1
激光雷达点云数据滤波算法综述 滤波对象及目的:通过机载激光雷达快速获取高精度三维地理数据,对它所获取的点云数据的滤波过程就是将LIDAR点云数据中的地面点和非地面点分离的过程。 滤波方法:对数学形态学的滤波算法、基于坡度的滤波法、基于TIN的LIDAR点云过滤算法、基于伪扫描线的滤波算法、基于多分辨率方向预测的LIDAR点云滤波方法。 (一)LIDAR数据形态学滤波算法: (1)离散点云腐蚀处理。遍历LIDAR点云数据,以任意一点为中心开w×w大小的窗口,比较窗口内各点的高程,取窗口内最小高程值为腐蚀后的高程(2)离散点膨胀处理。再次遍历LIDAR点云数据,对经过腐蚀后的数据用同样大小的结构窗口做膨胀。即以任意一点为中心开w×w大小的窗口,此时,用腐 蚀后的高程值代替原始高程值,比较窗口内各点的高程,取窗口内最大高程值 为膨胀后的高程 (3)地面点提取。设Z p是p点的原始高程,t为阈值,在每点膨胀操作结束时,对该点是否是地面点作出判断。如果p点膨胀后的高程值和其原始高程值Z p 之差的绝对值小于或等于阈值t,则认为p点为地面点,否则为非地面点 该算法有两种滤波方式:一种是按离散点进行滤波,一种是按格网滤波。(1)按离散点滤波:是对每个激光点进行腐蚀和膨胀操作各一次,结构窗口内数据的选取按距离来量度。 (2)按格网滤波:指将每个格网看成一个“像素”,按照数字图像处理中取邻域的方法来开取结构窗口。腐蚀时,格网的“像素值”即为w×w邻域所包含格网的最小高程值;膨胀时,格网的“像素值”即为w×w邻域所包含格网的最大高程值。 优缺点:总体上,数学形态学算法存在的主要问题是坡度阈值的人工选取和细节地形的方块效应。如果阈值设定太大,可能保留一些低矮的地物目标,设定太小,则可能削平地形特征。现在各种阈值的选取一般根据研究者的经验设定,或者根据地形特征设定的,没有考虑全局的特征因素,不具有普适性。解决这些问题的方法是根据地形的起伏大小和高程变化自适应的进行滤波窗口调整。但此方法在大范围地区及地形变化强烈山区的有效性还有待进一步 研究。 实际应用:从应用上,Lindenberger将数字形态学方法引人到机载激光雷达数据滤波中,首先采用水平结构单元对机载激光测高数据进行开运算,过滤剖面式激光扫描数据,然后利用自回归过程改善了开运算结果。 (二)基于坡度变化的滤波算法 滤波基本思想:基于坡度变化的滤波算法是根据地形坡度变化确定最优滤波函数,对于给定的高差值,随着两点间距离的减小,高程值大的激光脚点属于地面点的可能性就越小。
CY大数据云计算中心项目技术方案
CY大数据云计算中心项目技术方案 1.项目概述 1.1.项目背景 随着互联网+的被提出和云计算产业的不断发展,以及各行业信息化建设的推动,随之相关的业务数量呈爆发式增长。现有的IT基础设施越来越不能满足IT运维人员和用户的需要,一方面物理服务器的数量随着用户的需求持续增加,另一方面大量低利用率的设备占据着数据中心宝贵的机柜空间,造成了资源浪费。同时各省市各级单位大量重复建设数据中心,虽然目前基本实现的数据的互联互通,但是在整体范围内并没有实现资源整合和统一调度,无法实现资源的合理利用。 云计算和虚拟化技术的引入,将高效解决当前面临的一系列问题。云计算(cloud computing)改变了传统的IT基础设施交付和使用模式,通过虚拟化和云计算技术,以按需、易扩展的方式获得所需的资源应用。提供的资源被称为虚拟资源,虚拟资源在使用者看来是可以无限扩展的,并且可以随时获取,按需使用,随时扩展。 云计算的出现,对于我们建立一个统一、开放、灵活的信息化平台有着重要的意义,并且将有助于解决上述问题。各个政府单位和企业也迫切需要通过实施虚拟化和云计算技术打造行业内私有云,提高业务扩展的敏捷性,降低业务快速扩展时产生的风险和重复投资,同时降低运营成本。可以说,目前行业私有云平台的建设对于信息化的发展影响重要而深远。 1.2.建设目标 1)建设一个基于云计算技术的IaaS平台,提供虚拟机服务,将原来部署到物理机上的业务迁移部署到虚拟机上,并整合多个业务系统 2)通过基础架构云平台,打通底层资源池,将单位或者企业内部的所有的硬件资源、虚拟资源、应用资源进行互通和整合,实现对所有基础架构资源(可包括下级单位或分公司)的统一管理、弹性分配和调度。 3)实现统一的自助式资源服务门户。 4)采用高可用、安全、稳定的虚拟化底层架构;采用成熟先进的理念、技
点云数据处理
点云数据处理 ICP点云配准就是我们非常熟悉的点云处理算法之一。实际上点云数据在形状检测和分类、立体视觉、运动恢复结构、多视图重建中都有广泛的使用。点云的存储、压缩、渲染等问题也是研究的热点。随着点云采集设备的普及、双目立体视觉技术、VR和AR的发展,点云数据处理技术正成为最有前景的技术之一。PCL是三维点云数据处理领域必备的工具和基本技能,这篇博客也将粗略介绍。 三维点云数据处理方法 1. 点云滤波(数据预处理) 1. 点云滤波(数据预处理) 点云滤波,顾名思义,就是滤掉噪声。原始采集的点云数据往往包含大量散列点、孤立点,比如下图为滤波前后的点云效果对比。 点云滤波的主要方法有:双边滤波、高斯滤波、条件滤波、直通滤波、随机采样一致滤波、VoxelGrid滤波等,这些算法都被封装在了PCL点云库中。 2. 点云关键点 我们都知道在二维图像上,有Harris、SIFT、SURF、KAZE这样的关键点提取算法,这种特征点的思想可以推广到三维空间。从技术上来说,关键点的数量相比于原始点云或图像的数据量减小很多,与局部特征描述子结合在一起,组成关键点描述子常用来形成原始数据的表示,而且不失代表性和描述性,从而加快了后续的识别,追踪等对数据的处理了速度,故而,关键点技术成为在2D和3D 信息处理中非常关键的技术。
常见的三维点云关键点提取算法有一下几种:ISS3D、Harris3D、NARF、SIFT3D 这些算法在PCL库中都有实现,其中NARF算法是博主见过用的比较多的。 3. 特征和特征描述 如果要对一个三维点云进行描述,光有点云的位置是不够的,常常需要计算一些额外的参数,比如法线方向、曲率、文理特征等等。如同图像的特征一样,我们需要使用类似的方式来描述三维点云的特征。 常用的特征描述算法有:法线和曲率计算、特征值分析、PFH、FPFH、3D Shape Context、Spin Image等。 PFH:点特征直方图描述子,FPFH:跨苏点特征直方图描述子,FPFH是PFH的简化形式。这里不提供具体描述了,具体细节去谷歌吧。 4. 点云配准 点云配准的概念也可以类比于二维图像中的配准,只不过二维图像配准获取得到的是x,y,alpha,beta等放射变化参数,二三维点云配准可以模拟三维点云的移动和对其,也就是会获得一个旋转矩阵和一个平移向量,通常表达为一个4×3的矩阵,其中3×3是旋转矩阵,1*3是平移向量。严格说来是6个参数,因为旋转矩阵也可以通过罗格里德斯变换转变成1*3的旋转向量。 常用的点云配准算法有两种:正太分布变换和著名的ICP点云配准,此外还有许多其它算法,列举如下: ICP:稳健ICP、point to plane ICP、point to line ICP、MBICP、GICP NDT 3D、Multil-Layer NDT