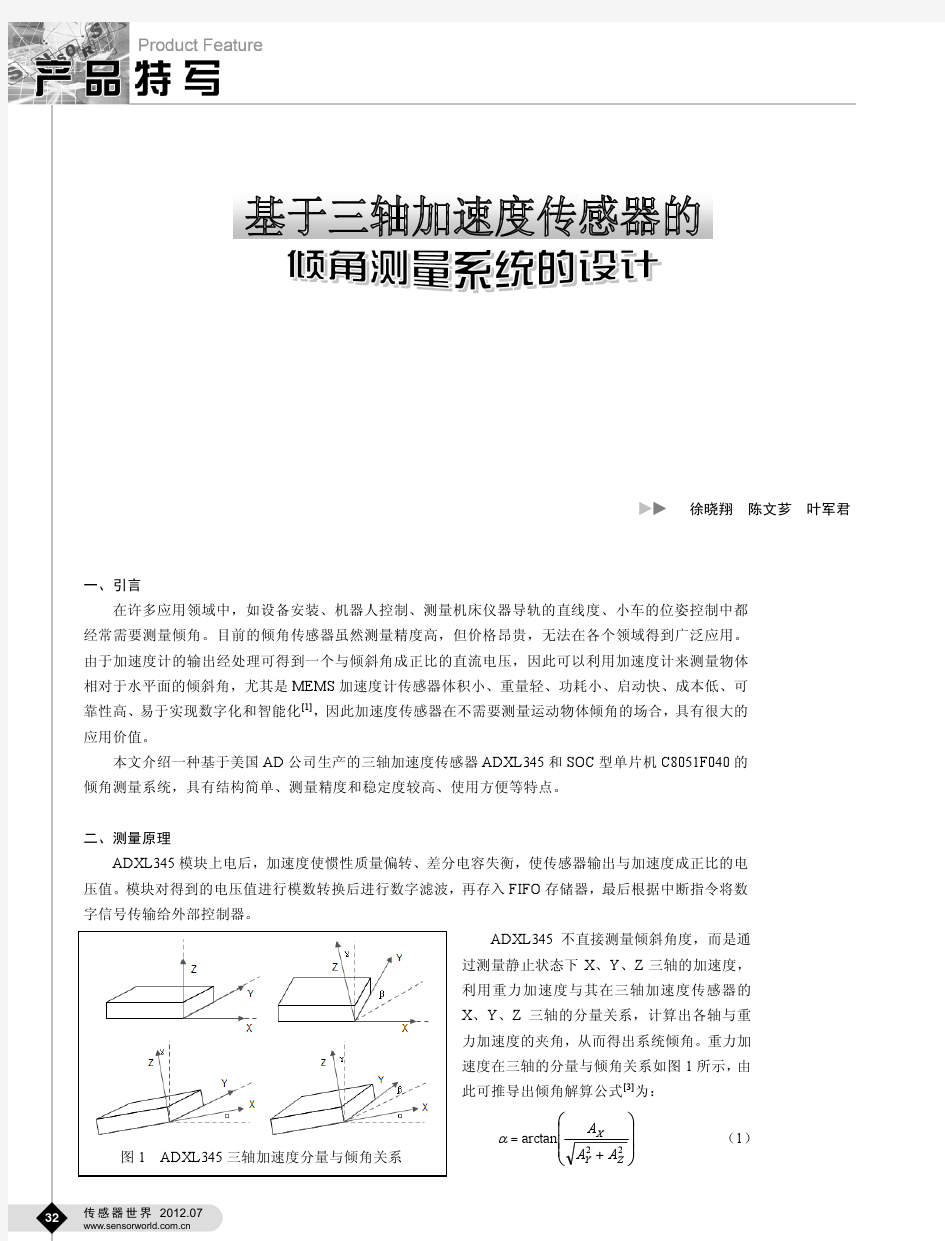
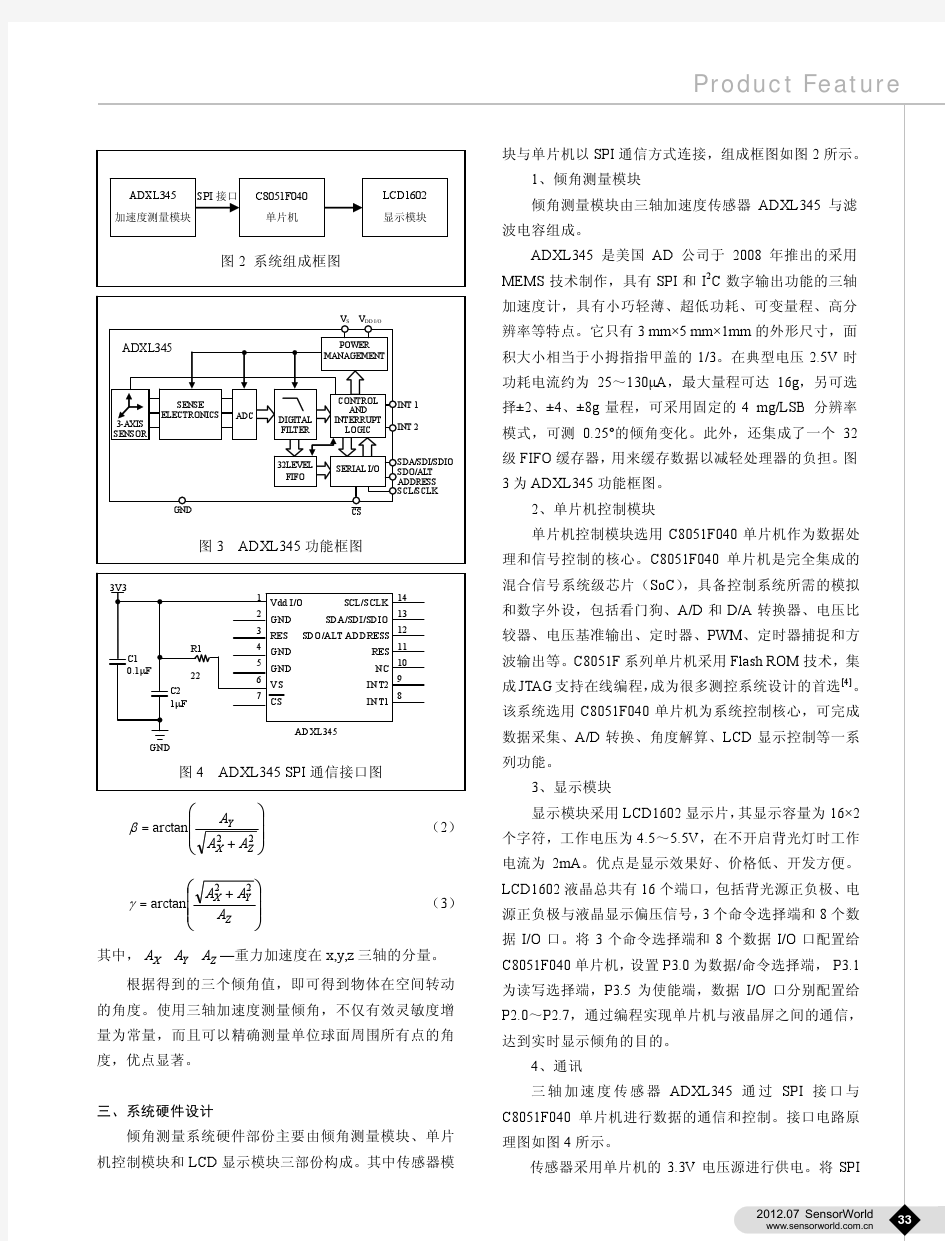
基于三轴加速度传感器的倾角测量系统的设计
基于压电加速度计速度测量信号调理电路设计要点
课程设计报告 题目基于单片机的压电加速度传感器 低频信号采集系统的设计 2014-2015 第二学期 专业班级2012级电气5班 姓名赵倩 学号201295014196 指导教师马鸣 教学单位电子电气工程学院 2015年7月6日
课程设计任务书 1.设计目的: ①掌握电子系统的一般设计方法和设计流程;并完成加速器低频信号的理论设计。 ②掌握应用电路的multisim等软件对所设计的电路进行仿真,通过仿真结果验 证设计的正确性,完成电路设计。 2.设计内容和要求(包括原始数据、技术参数、条件、设计要求等):压电式加速度传感器作为一种微型传感器,其输出信号比较微弱,通常为几十个毫伏或几百个微伏。所以有必要对其输出电压进行信号调理。主要包括电源模块、放大模块、滤波模块等组成。 3.设计工作任务及工作量的要求: (1)查阅相关资料,完成系统总体方案设计; (2)完成系统硬件设计; (3)对所设计的电路进行仿真; (4)按照要求撰写设计说明书;
一、压电式加速度传感器的概要 (4) 二、信号采集系统的总设计方案 (5) 三、信号采集系统分析 (6) 1、电荷转换部分: (6) 2、适调放大部分 (6) 3、低通滤波部分: (7) 4、输出放大部分 (7) 5、积分器部分: (8) 四、单片机软件设计 (8) 五、Multisim仿真分析 (10) 1.仿真电路图 (10) 2.仿真波形及分析 (11) 六、误差分析 (11) 1、连接电缆的固定 (11) 2、接地点选择 (12) 3、湿度的影响 (12) 4、环境温度的影响 (12) 七、改进措施 (12) 六、心得体会 (12) 七、参考文献 (13)
用凯特摆测量重力加速度实验报告
用凯特摆测量重力加速度 实验目的:学习凯特摆的实验设计思想和技巧,掌握一种比较精确的测量重力加速度的方法。 实验原理:1、当摆幅很小时,刚体绕O轴摆动的周期: 刚体质量m,重心G到转轴O的距离h,绕O轴的转动惯量I,复 摆绕通过重心G的转轴的转动惯量为I G 。 当G轴与O轴平行时,有I=I G+mh2 ∴ ∴复摆的等效摆长l=( I G+mh2 )/mh 2、利用复摆的共轭性:在复摆重心G旁,存在两点O和O′,可使 该摆以O为悬点的摆动周期T?与以O′为悬点的摆动周期T?相同, 可证得|OO′|=l,可精确求得l。 3、对于凯特摆,两刀口间距就是l,可通过调节A、B、C、D四摆 锤得位置使正、倒悬挂时得摆动周期T?≈T?。 ∴4π2/g=(T?2+T?2)/2l + (T?2-T?2)/2(2h?-l) = a + b 实验仪器:凯特摆、光电探头、米尺、数字测试仪。 实验内容:1、仪器调节 选定两刀口间得距离即该摆得等效摆长l,使两刀口相对摆杆基本 对称,并相互平行,用米尺测出l的值,粗略估算T值。 将摆杆悬挂到支架上水平的V形刀承上,调节底座上的螺丝,借 助于铅垂线,使摆杆能在铅垂面内自由摆动,倒挂也如此。 将光电探头放在摆杆下方,让摆针在摆动时经过光电探测器。
让摆杆作小角度摆动,待稳定后,按下reset钮,则测试仪开始自 动记录一个周期的时间。 2、测量摆动周期T?和T? 调整四个摆锤的位置,使T?和T?逐渐靠近,差值小于,测量正、 倒摆动10个周期的时间10T?和10T?各测5次取平均值。 3、计算重力加速度g及其标准误差σg 。 将摆杆从刀承上取下,平放在刀口上,使其平衡,平衡点即重心G。 测出|GO|即h?,代入公式计算g。 推导误差传递公式计算σg 。 实验数据处理:1、l的值 l=?(l?+l?+l?)= σ=,u A =σ/=, ∴ΔA =t P ?u A =*= u B=ΔB /C=3= ∴u L == T e == 2、T?和T?的值 T?= σ=*10ˉ?s,u A =σ/=*10ˉ?s ∴ΔA =t P ?u A =*=*10ˉ?s u B=ΔB /C=3=*10ˉ?s ∴u T1 ==*10ˉ?s T?= σ=*10ˉ?s,u A =σ/=*10ˉ?s ∴ΔA =t P ?u A =*=*10ˉ?s u B=ΔB /C=3=*10ˉ?s
三轴加速度传感器原理应用及前景分析
三轴加速度传感器原理及应用 2012年09月09日 12:42来源:本站整理作者:胡哥我要评论(0) 三轴加速度传感器原理 MEMS换能器(Transducer)可分为传感器(Sensor)和致动器(Actuator)两类。其中传感器会接受外界的传递的物理性输入,通过感测器转换为电子信号,再最终转换为可用的信息,如加速度传感器、陀螺仪、压力传感器等。其主要感应方式是对一些微小的物理量的变化进行测量,如电阻值、电容值、应力、形变、位移等,再通过电压信号来表示这些变化量。致动器则接受来自控制器的电子信号指令,做出其要求的反应动作,如光敏开关、MEMS显示器等。 目前的加速度传感器有多种实现方式,主要可分为压电式、电容式及热感应式三种,这三种技术各有其优缺点。以电容式3轴加速度计的技术原理为例。电容式加速度计能够感测不同方向的加速度或振动等运动状况。其主要为利用硅的机械性质设计出的可移动机构,机构中主要包括两组硅梳齿(Silicon Fingers),一组固定,另一组随即运动物体移动;前者相当于固定的电极,后者的功能则是可移动电极。当可移动的梳齿产生了位移,就会随之产生与位移成比例电容值的改变。 当运动物体出现变速运动而产生加速度时,其内部的电极位置发生变化,就会反映到电容值的变化(ΔC),该电容差值会传送给一颗接口芯片(InteRFace Chip)并由其输出电压值。因此3轴加速度传感器必然包含一个单纯的机械性MEMS传感器和一枚ASIC接口芯片两部分,前者内部有成群移动的电子,主要测量XY及Z轴的区域,后者则将电容值的变化转换为电压输出。 文中所述的传感器和ASIC接口芯片两部分都可以采用CMOS制程来生产,而在目前的实际生产制造中,由于二者实现技术上的差异,这两部分大都会通过不同的加工流程来生产,再最终封装整合到一起成为系统单封装芯片(SiP)。封装形式可采用堆叠(Stacked)或并排(Side-by-Side)。 手持设备设计的关键之一是尺寸的小巧。目前ST采用先进LGA封装的加速度传感器的尺寸仅有3 X 5 X 1mm,十分适合便携式移动设备的应用。但考虑到用户对尺寸可能提出的进一步需求,加速度传感器的设计要实现更小的尺寸、更高的性能和更低的成本;其检测与混合讯号单元也会朝向晶圆级封装(WLP)发展。 下一代产品的设计永远是ST关注的要点。就加速度传感器的发展而言,单芯片结构自然是
大学物理重力加速度的测定实验报告范文.doc
大学物理重力加速度的测定实验报告范 文 一、实验任务 精确测定银川地区的重力加速度 二、实验要求 测量结果的相对不确定度不超过5% 三、物理模型的建立及比较 初步确定有以下六种模型方案: 方法一、用打点计时器测量 所用仪器为:打点计时器、直尺、带钱夹的铁架台、纸带、夹子、重物、学生电源等. 利用自由落体原理使重物做自由落体运动.选择理想纸带,找出起始点0,数出时间为t的p点,用米尺测出op的距离为h,其中t=0.02秒×两点间隔数.由公式h=gt2/2得g=2h/t2,将所测代入即可求得g. 方法二、用滴水法测重力加速度 调节水龙头阀门,使水滴按相等时间滴下,用秒表测出n个(n 取50—100)水滴所用时间t,则每两水滴相隔时间为t′=t/n,用米尺测出水滴下落距离h,由公式h=gt′2/2可得g=2hn2/t2. 方法三、取半径为r的玻璃杯,内装适当的液体,固定在旋转台上.旋转台绕其对称轴以角速度ω匀速旋转,这时液体相对于玻璃
杯的形状为旋转抛物面 重力加速度的计算公式推导如下: 取液面上任一液元a,它距转轴为x,质量为m,受重力mg、弹力n.由动力学知: ncosα-mg=0 (1) nsinα=mω2x (2) 两式相比得tgα=ω2x/g,又tgα=dy/dx,∴dy=ω2xdx/g, ∴y/x=ω2x/2g. ∴ g=ω2x2/2y. .将某点对于对称轴和垂直于对称轴最低点的直角坐标系的坐标x、y测出,将转台转速ω代入即可求得g. 方法四、光电控制计时法 调节水龙头阀门,使水滴按相等时间滴下,用秒表测出n个(n 取50—100)水滴所用时间t,则每两水滴相隔时间为t′=t/n,用米尺测出水滴下落距离h,由公式h=gt′2/2可得g=2hn2/t2. 方法五、用圆锥摆测量 所用仪器为:米尺、秒表、单摆. 使单摆的摆锤在水平面内作匀速圆周运动,用直尺测量出h(见图1),用秒表测出摆锥n转所用的时间t,则摆锥角速度ω=2πn/t 摆锥作匀速圆周运动的向心力f=mgtgθ,而tgθ=r/h所以mgtgθ=mω2r由以上几式得: g=4π2n2h/t2. 将所测的n、t、h代入即可求得g值.
压电式传感器测量加速度
压 电 式 加 速 度 测 试 系 统 姓名:张书峰 学号:201003140125 学院:机电学院 班级:机自101 指导教师:王玮
一设计概论 压电传感器是一种可逆性传感器,既可以将机械能转换为电能,又可以将机械能转换为电能。它是利用某些物质(如石英、钛酸钡或压电陶瓷、高分子材料等)的压电效应来工作的。在外力作用下,在电介质表面产生电荷,从而实现非电量测量的目的。因此是一种典型的自发电式传感器。压电传感器是力敏感元件,它可以测量最终能变换为力的那些非电物理量,例如,动态力、动态压力、振动加速度等 现有测试系统的各个组成部分常常以信息流的过程来划分。一般可以分为:信息的获得,信息的转换,信息的显示、信息的处理。作为一个完整的非电量电测系统,也包括了信息的获得、转换、显示和处理等几个部分。因为它首先要获得被测量的信息,把它变换成电量,然后通过信息的转换,把获得的信息变换、放大,再用指示仪或记录仪将信息显示出来,有的还需要把信息加以处理。因此非电量电测系统,具体来说,一般包括传感器(信息的获得)、测量电路(信息的转换)、放大器、指示器、记录仪(信息的显示)等几部分有时还有数据处理仪器(信息的处理)。它们间的 关系可 用右框 图来表 示。 其中传感器是一个把被测的非电物理变换成电量的装置,因此是一种获得信息的手段,它在非电量电测系统中占有重要的位 置。它获得信息 的正确与否,直 接影响到整个 测量系统的测 量效果。测量电 路的作用是把 传感器的输出
变量变成易于处理的电压或电流信号,使信号能在指示仪上显示或在记录仪中记录。测量电路的种类由传感器的类型而定。压电加速度传感器常用的测量电路是电荷放大器。常用的压电加速度传感器的动态测量系统如图1.2 二整体设计方案 1、测量的示意图 2、设计的原理 压电式加速度传感器属于惯性式传感器,工作原理是以某些物质的压电效应为基础,在加速度计受振时,加在压电元件上的力也随之变化。当被测振动频率远低于加速度计的固有频率时,则力的变化与被测加速度成正比,可以把被测的非电物理量加速度转化为电量。由于压电式传感器的输出电信号是微弱的电荷,而且传感器本身有很大内阻,故输出能量甚微,这给后接电路带来一定困难。为此,通常器信号选用电荷放大器作为电信号的测量电路。 3、方框图
三轴角度检测(倾角传感器MMA7455(加速度传感器))
#include 三轴加速度传感器在跌倒检测中的应用 前言 人们在跌倒后会面临双重危险。显而易见的是跌倒本身可能对人体产生伤害;另外,如果跌倒后不能得到及时的救助,可能会使结果更加恶化。例如,许多老年人由于其身体比较虚弱,自理能力和自我保护能力下降,常常会发生意外跌倒,如果得不到及时的救助,这种跌倒可能会导致非常严重的后果。有资料显示,很多严重的后果并不是由于跌倒直接造成的,而是由于跌倒后,未得到及时的处理和救护。当出现跌倒情况时,如果能够及时地通知到救助人员,将会大大地减轻由于跌倒而造成的危害。 不仅是对老人,在很多其他情况下,跌倒的报警也是非常有帮助的,尤其是从比较高的地方跌倒下来的时候。比如人们在登山,建筑,擦窗户,刷油漆和修理屋顶的时候。 这促使人们越来越热衷于对跌倒检测以及跌倒预报仪器的研制。近年来,随着iMEMS?加速度传感器技术的发展,使得设计基于三轴加速度传感器的跌倒检测器成为可能。这种跌倒检测器的基本原理是通过测量佩戴该仪器的个体在运动过程中的三个正交方向的加速度变化来感知其身体姿态的变化,并通过算法分析判断该个体是否发生跌倒情况。当个体发生跌倒时,仪器能够配合GPS模块以及无线发送模块对这一情况进行定位及报警,以便获得相应的救助。而跌倒检测器的核心部分就是判断跌倒情况是否发生的检测原理及算法。 ADXL3451是ADI公司的一款3轴、数字输出的加速度传感器。本文将在研究跌倒检测原理的基础上,提出一种基于ADXL345的新型跌倒检测解决方案。 iMEMS加速度传感器ADXL345 iMEMS 半导体技术把微型机械结构与电子电路集成在同一颗芯片上。iMEMS加速度传感器就是利用这种技术,实现对单轴、双轴甚至三轴加速度进行测量并产生模拟或数字输出的传感器。根据不同的应用,加速度传感器的测量范围从几g到几十g不等。数字输出的加速度传感器还会集成多种中断模式。这些特性可以为用户提供更加方便灵活的解决方案。 ADXL345是ADI公司最近推出的基于iMEMS技术的3轴、数字输出加速度传感器。ADXL345具有+/-2g,+/-4g,+/-8g,+/-16g可变的测量范围;最高13bit分辨率;固定的4mg/LSB灵敏度;3mm*5mm*1mm超小封装;40-145uA超低功耗;标准的I2C或SPI数字接口;32级FIFO存储;以及内部多种运动状态检测和灵活的中断方式等特性。所有这些特性,使得ADXL345有助于大大简化跌倒检测算法,使其成为一款非常适合用于跌倒检测器应用的加速度传感器。 本文给出的跌倒检测解决方案,完全基于ADXL345内部的运动状态检测功能和中断功能,甚至不需要对加速度的具体数值进行实时读取和复杂的计算操作,可以使算法的复杂度降至最低。 中断系统 图1给出了ADXL345的系统框图及管脚定义。 概述: ADXL345是一款小而薄的超低功耗3轴加速度计,分辨率高(13位),测量范围达±16g。数字输出数据为16位二进制补码格式,可通过SPI(3线或4线)或I2C数字接口访问。ADXL345非常适合移动设备应用。它可以在倾斜检测应用中测量静态重力加速度,还可以测量运动或冲击导致的动态加速度。其高分辨率(3.9mg/LSB),能够测量不到1.0。的倾斜角度变化。该器件提供多种特殊检测功能。 活动和非活动检测功能通过比较任意轴上的加速度与用户设置的阈值来检测有无运动发生。敲击检测功能 可以检测任意方向的单振和双振动作。自由落体检测功能可以检测器件是否正在掉落。这些功能可以独立 映射到两个中断输岀引脚中的一个。正在申请专利的集成式存储器管理系统采用一个32级先进先岀(FIFO)缓冲器,可用于存储数据,从而将主机处理器负荷降至最低,并降低整体系统功耗。低功耗模式支持基于运动的智能电源管理,从而以极低的功耗进行阈值感测和运动加速度测量。ADXL345采用3 mm X 5 mm x 1 mm,14引脚小型超薄塑料封装。 对比常用的飞思卡尔的MMZ7260三轴加速度传感器,ADXL345,具有测量精度高、可以通过SPI或I2C 直接和单片机通讯等优点。 特性: 超低功耗:VS= 2.5 V 时(典型值),测量模式下低至23uA, 待机模式下为0.1 g A功耗随带宽自动按比例变化 用户可选的分辨率10位固定分辨率全分辨率,分辨率随g范围提高而提高, ±16g时高达13位(在所有g范围内保持4 mg/LSB的比例系数) 正在申请专利的嵌入式存储器管理系统采用FIFO技术,可将主机处理器负荷 降至最低。单振/双振检测,活动/非活动监控,自由落体检测 电源电压范围:2.0 V 至3.6 V I / O电压范围:1.7 V至VS SPI (3线和4线)和I2C数字接口 灵活的中断模式,可映射到任一中断引脚 通过串行命令可选测量范围 通过串行命令可选带宽 宽温度范围(-40°C至+85 °C) 抗冲击能力:10,000 g 无铅/符合RoHS标准 小而薄:3 mn X 5 mm x 1 mm,LGA 封装 模组尺寸:23*18*11mm (高度含插针高度 应用: 机器人控制、运动检测 过程控制,电池供电系统 硬盘驱动器(HDD)保护,单电源数据采集系统 手机,医疗仪器,游戏和定点设备,工业仪器仪表,个人导航设备 Acceleration due to gravity 1. Aim: To measure ‘g’, the acceleration due to gravity using a simple pendulum. 2. Theory: A simple pendulum consists of a particle of mass m, attached to a frictionless pivot P by a cable of length L and negligible mass. When the particle is pulled away from its equilibrium position by an angle θand released, it swings back and forth as Figure 1 shows. By attaching a pen to the bottom of the swinging particle and moving a strip of paper beneath it at a steady rate, we can record the position of the particle as time passes. The graphical record reveals a pattern that is similar (but not identical) to the sinusoidal pattern for simple harmonic motion. Figure 1 A simple pendulum swinging back and forth about the pivot P. If the angle θis small, the swinging is approximately simple harmonic motion. Gravity causes the back-and-forth rotation about the axis at P. The rotation speeds up as the particle approaches the lowest point and slows down on the upward part of the swing. Eventually the angular speed is reduced to zero, and the particle swings back. If the angle of oscillation is large, the pendulum does not exhibit simple harmonic motion. The motion of a simple pendulum is nearly simple harmonic. The periodic time T is related to the length L of the pendulum and the local acceleration due to gravity g. 2 T=or 2 2 4 T L g π ?? = ? ?? If we measure the periodic time T for different lengths L, and plot T2 versus L, 重力加速度测量(设计性实验) 【实验目的】 (1)推导单摆测量重力加速度的公式。 (2)掌握单摆测量重力加速度实验的实验设计方法及验证方法。 (3)掌握间接测量量不确定度的计算方法。 (4)了解单摆测量重力加速度实验的主要误差来源。 (5)估算实验仪器的选取参数并设计实验数据记录表格。 【设计实验】 设计性实验的设计过程主要有以下几步: (1)根据待测的物理量确定出实验方法(理论依据),推导出测量的数学公式;判定方法误差给测量结果带来的影响。 (2)根据实验方法及误差设计要求,分析误差来源,确定所需要采用的测量仪器(包括量程、精度等)以及测量环境应达到的要求(如空气、电磁、振动、温度、海拔高度等)。 (3)确定实验步骤、需要测量的物理量、测量的重复次数等。 (4)设计实验数据表格及要计算的物理量。 (5)实验验证。要用测得的实验数据,采用误差理论来验证实验结果。若不符合测量要求,则需对上述步骤中的有关参数做出适当调整并重做实验,据测得的实验数据进行实验验证,以此类推直到符合要求为止。 设计实验的原则应在满足设计要求的前提下,尽可能选用简单、精度低的仪器,并能降低对测量环境的要求,尽量减少实验测量次数。 【设计要求】 (1)测定本地区的重力加速度,要求重力加速度的相对不确度小于0.5%,即 g 0.5u g ≤%。确 定所需仪器的量程和精度,以及测量参数(摆长和摆动次数)。 (2)本实验是测量重力加速度的设计性实验,但考虑到设计难度、仪器资源的限制等因素,规定其实验方法采用单摆法。 (3)可用仪器有:钢卷尺(1 mm/2 m ,表示最小分度值为1 mm ,量程为2 m ,下同)、钢直尺(1 mm/1 m )、游标卡尺(0.02 mm/20 cm )、普通直尺(1 mm/20 cm )、电子秒表(0.01 s )、单摆实验仪(含摆线、摆球等)。 【实验内容】 (1)原理分析。写出单摆法测量公式完整的推导过程及近似要求,并画出原理图(查阅相关书籍及网站)。 (2)误差分析。分析实验过程中的主要误差来源并估算。 (3)不确定度的推导与计算。 (4)估算实验参数(摆长和摆动次数)。 (5)设计实验步骤与数据表格。 (6)实验与验证。 【设计提示】 重力加速度的测定 一,实验目的 1,学习秒表、米尺的正确使用 2,理解单摆法和落球法测量重力加速度的原理。 3,研究单摆振动的周期与摆长、摆角的关系。 4,学习系统误差的修正及在实验中减小不确定度的方法。 二,实验器材 单摆装置,停表(精度为0.01s),钢卷尺(精度为1mm),游标卡尺(精度为0.02mm) 三,实验原理 单摆是由一根不能伸长的轻质细线和悬在此线下端体积很小的重球所构成。在摆长远大于球的直径,摆球质量远大于线的质量的条件下,将悬挂的小球自平衡位置拉至一边(很小距离,摆角小于5°),然后释放,摆球即在平衡位置左右作周期性的往返摆动,如图2-1所示。 f =F sinθf θ T=F cosθ F= mg L 单摆原理图 摆球所受的力f 是重力和绳子张力的合力,f 指向平衡位置。当摆角很小时(θ<5°),圆弧可近似地看成直线,f 也可近似地看作沿着这一直线。设摆长为L ,小球位移为x ,质量为m ,则 L x = θsin f=θsin F =-L x mg - =-m L g x 由f=ma ,可知a=- L g x 式中负号表示f 与位移x 方向相反。 单摆在摆角很小时的运动,可近似为简谐振动,比较谐振动公式:a = m f =-ω2 x 可得ω=l g ,即02 22=+x dt x d ω,解得)cos(0?ω+=t A x ,0A 为振幅,?为初相。 应有[])2cos())((cos )cos(000?πω?ω?ω++=++=+=t A T t A t A x 于是得单摆运动周期为:T =ωπ 2=2πg L 即 T 2=g 2 4πL 或 g=4π22 T L 又由于细线不是完全没有质量,他在外力作用下也不可能完成伸长,所以,单摆的重力加速度公式修正为 22 21 4T d L g +=π 四,实验步骤 1,数据采集 (1)测量摆长L 用米尺测量摆球支点和摆球顶点或最低点的间距l ,用游标卡尺测量小球的直径d,则摆长 d l L 2 1+= (2)测量摆动周期 用手把摆球拉至偏离平衡位置约? 5放开,让其在一个铅直面内自由摆动,当小球通过平衡位置的瞬间,开始计时,连续默数100次全振动时间为t ,再除以100,得到周期T 。 (3)将所测数据列于下表中,并计算出摆长、周期及重力加速度。 Three-axis acceleration sensor variable in capacitance under application of acceleration United States Patent 5383364 Abstract: An acceleration sensor comprises an upper semiconductor substrate having a rigid frame, four deformable beams connected with the rigid frame, and a weight portion supported by the plurality of deformable beams, a lower semiconductor substrate bonded to the rigid frame, a plurality of movable electrodes attached to the weight portion, and electrically isolated from one another, and a plurality of stationary electrodes attached to the second semiconductor substrate, and opposite to the plurality of movable electrodes for forming a plurality of variable capacitors, and the center of gravity of the weight portion is spaced from a common neutral surface of the four beams for allowing acceleration to produce bending moment exerted on the four beams, thereby causing the variable capacitors to independently change the capacitance. Inventors: Takahashi, Masaji (Tokyo, JP) Kondo, Yuji (Tokyo, JP) Application Number: 07/972537 Publication Date: 01/24/1995 Filing Date: 11/06/1992 Export Citation: Click for automatic bibliography generation Assignee: NEC Corporation (Tokyo, JP) Primary Class: 73/514.32 Other Classes: 73/514.34, 73/514.36, 361/280 International Classes: G01P15/125; G01P15/18; (IPC1-7): G01P15/125 Field of Search: 73/517R, 73/517AV, 73/517B, 361/280 View Patent Images: Download PDF 5383364 PDF help US Patent References: 5243861 Capacitive type semiconductor accelerometer 1993-09-14 Kloeck et al. 735/17R 5134881 Micro-machined accelerometer with composite material springs 1992-08-04 MMA7260 三轴加速度传感器使用手册 一、MMA7260QT的简介 MMA7260QT低成本微型电容式加速度传感器,采用了信号调理、单极低通滤波器和温度补偿技术,并且提供4个量程可选,用户可在4个灵敏度中的选择。该器件带有低通滤波并已做零g补偿。本产品还提供休眠模式,因而是电池充电的手持设备产品的理想之选。 二、特性: (1) 可选灵敏度(1.5g/2g/4g/6g) (2) 低功耗:500 μA (3) 休眠模式: 3 μA (4) 低压运行:2.2 V - 3.6 V (5) 6mm x 6mm x 1.45 mm的无引线四方扁平 (QFN) 封装; (6) 高灵敏度(800 mV/g @ 1.5g) (7) 快速开启 (8) 低通滤波器具备内部信号调理 (9) 设计稳定、防震能力强 (10) 无铅焊接 (11) 环保封装 (12) 成本低 三、典型应用: 三轴加速度传感器是一种可以对物体运动过程中的加速度进行测量的电子设备,典型互动应用中的加速度传感器可以用来对物体的姿态或者运动方向进行检测,比 如其中WII和iPhone中的经典应用。Nokia最新推出的手机N95利用内置的加速度传感器,让用户可以通过机身的摆动进行各种操作,包括主菜单操 作、图片浏览、切歌操作甚至进行游戏的控制等,非常全面,甚至超越了苹果 iPhone的动作感应功能的应用范畴。 基于Freescale公司MMA7260的这个三轴加速度传感器,对于普通的互动应用来讲应该是一个不错的选择, 可以用于摩托车和汽车防盗报警器,遥控航模,游戏手柄,跌倒探测,硬盘冲击保护,倾斜角度测量,电梯安全监控等需要测试加速度的地方。 实验3 重力加速度的测量(单摆法) 单摆实验有着悠久历史,当年伽利略在观察比萨教堂中的吊灯摆动时发现,摆长一定的摆,其摆动周期不因摆角而变化,因此可用它来计时,后来惠更斯利用了伽利略的这个观察结果,发明了摆钟。 本实验是用经典的单摆公式测量重力加速度g ,对影响测量精度的因素进行分析,学习如何改进测量方法,以进一步提高测量精度。 【目的要求】 1、用单摆测定动力加速度; 2、学习使用计时仪器(停表、光电计时器); 3、学习在直角坐标纸上正确作图及处理数据; 4、学习用最小二乘法作直线拟合。 【仪器用具】 单摆装置,带卡口的米尺,游标卡尺,电子停表,光电计时器。 【实验原理】 把一个金属小球拴在一根细长的线上,如图1所示。如果细线的质量比小球的质量小很多,而球的直径又比细线的长度小很多,则此装置可看做是一根不计质量的细线系住一个质点,这就是单摆。略去空气的阻力和浮力以及线的伸长不计,在摆角很小时,可以认为单摆 作简谐振动,其振动周期T 为 g l T π 2= ,224T l g π= (1) 式中l 是单摆的摆长,就是从悬点O 到小球 球心的距离,g 是重力加速度。因而,单摆周期 T 只与摆长l 和重力加速度g 有关。如果我们测量 出单摆的l 和T ,就可以计算出重力加速度g 。 【实验内容】 1、固定摆长,测定g 。 (1)测定摆长(摆长l 取100cm 左右)。 图1 ①先用带刀口的米尺测量悬点O 到小球最低点A 的距离1l (见图1),如下所列: 再估计1l 的极限不确定l e 1,计算出标准不确定度31 1l l e =σ。 ②先用游标卡尺多次测量小球沿摆长方向的直径d (见图4-1),如下所列: 中国石油大学(华东)现代远程教育 实验报告 课程名称:大学物理() 实验名 称: 速度、加速度的测定和牛顿运动定律的验证 实验形式:在线模拟+现场实践 提交形式:提交书面实验报告 学生姓学号: 年级专业层次:高起专 学习中心:________ 提交时间:2016 年6 月15 日 、实验目的 1.了解气垫导轨的构造和性能,熟悉气垫导轨的调节和使用方法。 2?了解光电计时系统的基本工作原理,学会用光电计时系统测量短暂时间的方法。 3.掌握在气垫导轨上测定速度、加速度的原理和方法。 4?从实验上验证F=ma的关系式,加深对牛顿第二定律的理解。 5?掌握验证物理规律的基本实验方法。 二、实验原理 1速度的测量 一个作直线运动的物体,如果在t~t+ △时间内通过的位移为\x x~x+ Ax ,则该物体在 1F =—— At时间内的平均速度为亠,△越小,平均速度就越接近于t时刻的实际速度。当 A t T 时,平均速度的极限值就是t时刻(或x位置)的瞬时速度 ir = lim ------------------——— (1) 实际测量中,计时装置不可能记下 A t T0勺时间来,因而直接用式(1)测量某点的速 度就难以实现。但在一定误差范围内,只要取很小的位移Ax测量对应时间间隔At就可 以用平均速度订近似代替t时刻到达x点的瞬时速度r。本实验中取Ax为定值(约10mm ), 用光电计时系统测出通过Ax所需的极短时间A,较好地解决了瞬时速度的测量问题。 2.加速度的测量 在气垫导轨上相距一定距离S的两个位置处各放置一个光电门,分别测出滑块经过这两 个位置时的速度v1和v2。对于匀加速直线运动问题,通过加速度、速度、位移及运动时间之间的关系,就可以实现加速度a的测量。 (1)由■- "-+■-测量加速度 在气垫导轨上滑块运动经过相隔一定距离的两个光电门时的速度分别为v1和v2,经过 两个光电门之间的时间为t21,则加速度a为 (2) (2)根据式(2)即可计算出滑块的加速度。 (3)由厂测量加速度 设v1和v2为滑块经过两个光电门的速度,S是两个光电门之间距离,则加速度a为 根据式(3)也可以计算出作匀加速直线运动滑块的加速度。 三轴加速度传感器的步态识别系统 近年来随着微机电系统的发展,加速度传感器已经广泛应用于各个领域并拥有良好的发展前景。例如在智能家居、手势识别、步态识别、跌倒检测等领域,都可以通过加速度传感器实时获得行为数据从而判断出用户的行为情况。 目前许多智能手机都内置多种传感器,通过预装软件就能够获得较精确的原始数据。本文提出一种基于三轴加速度传感器,用智能手机采集用户数据,对数据进行处理及特征提取获得特征矩阵并分类识别的方法,有效地识别了站立、走、跑、跳四种动作。 人体动作识别处理过程主要包含数据采集、预处理、特征提取和分类器识别数据采集数据采集和发送模块安装在用户端,另一个数据接收模块接在电脑终端上。 由于我们制作的采集模块很轻、很小,所以方便佩戴。当用户运动时,三轴加速度传感器会将据采集并通过无线方式发送给电脑接收模块,再通过电脑上的软件部分对采集到的数据进行分析处理,将结果输出,显示用户的实时状态。 本文使用的加速度传感器数据来自于共计60个样本。传感器统一佩戴于腰间。本文选取了其中一位采集者的数据用于主要分析研究,其余两位采集者的数据则用于验证由第一位采集者数据研究所得的结论,这样的做法既减小了数据处理的繁杂又能保证最终结果的准确性。预处理应用程序设置的采集时间间隔为0.1s,对每一个动作的采集时间为25s。考虑到用户在采集数据一开始与将要结束时的动作 不平稳可能对数据带来较大影响,前2s2s采集的数据将被舍弃不予分析。因原始加速度信号一般都含有噪声,为了提高数据分析结果的准确性,通常在原始加速度信号进行特征提取前对其进行去躁、归一化、加窗等预处理。通过加窗处理,不仅规整了加速度信号的长度,而且方便研究人员按照需要选择适宜的信号长度,这样有利于后续的特征提取。 许多研究人员使所示。研究人员采集的加速度传感器信号由于采集者的动作力度不同造成加速度信号的幅度差异较大,这会对之后的分类识别造成负面影响,归一化技术可以调整加速度信号的幅度,按照一定的归一化算法可以使加速度信号的幅度限定在某一数值范围内,文献[2]在识别跑、站立、跳和走路这四种动作时对四种动作的加速度信号进行了归一化;文献[3]在进行手势识别时对手势动作的加速度信号进行了归一化处理。特征提取特征提取和选择模块的作用在于从加速度信号中提取出那些表征人体行为的特征向量,处于预处理模块和分类器模块之间,是人体行为识别过程中的一个重要环节,直接影响分类识别的效果。特征的提取方法具有多样性,对于不同的识别目的,研究人员会提取不同的特征,例如为了识别分类站立和跑步,研究人员通常会选取方差和标准差这类能够反映加速度信号变化大小的特征,而为了识别分类走路和跑步,研究人员通常会选取能量和均值这类能够反映加速度信号大小的特征。使用不同的特征表征行为会对分类识别效果产生不同的影响,因此寻找更加有效的特征一直是研宄人员关注的一个课题。通过查阅大量的文献,大致可以把加速度信 实验一自由落体重力加速度的测定 一、实验目的 1. 通过测定重力加速度,加深对匀加速运动规律的理解: 2. 学习用光电法计时; 3. 学习用落体法测定重力加速度. 二、仪器组成 YJ-LG-3自由落体重力加速度测定仪、YJ-LG-3自由落体重力加速度测定仪专用毫秒计、钢球、卷尺等 三、仪器结构 1. YJ-LG-3自由落体重力加速度测定仪专用毫秒 计面板如图l所示 2. 自由落体测定仪如图2所示 四、实验原理 在重力作用下,物体的下落运动是匀加速直线运 动.可用下列方程来描述: 式中s是在时间t内物体下落的距离.g是重力加速度.如果物体下落的初速度为0,即Vo=0时, 可见若能测得物体在最初t秒内通过的距离S,就可以 估算出g的值,在实验中要严格保证初速度为零有一定 的困难.,故常采用下列方法:实验时,让物体从静止开 始自由下落.如图3所示,设它到达A点的速度为V0. 从A点开始,经过时间t1到达B点,令A、B两点的距 离为S1., 则 若保持上述的初始条件不变,则从A点起,经过时 间t2后.物体到达C点.令A、C两点的距离为S2.则 由式3和式4得: 以上两式相减,得: 那么就有 这里不再出现初速度值,式中的各值均可用自由落体测定仪测量得到. 五、实验步骤 1.调节自由落体仪垂直.将重锤装置安装好,调整底座上的调节螺旋,使重锤悬线与落体仪两立柱平行. 2.将第一光电门放在立柱A处.如离顶端20cm处,调第二光电门于B处.如两光电门相距90cm处,将实验装置上的激光器、接收器与YJ-LG-3自由落体重力加速度测定仪专用毫秒计连接,打开电源,可看见激光器发出红光. 3.调节上、下两个激光器。使激光束平行地对准重锤线后,取下重锤装置. 4.保持上、下两个激光器位置不变,调节上、下两个接收器分别与对应的激光器对准(使激光束垂直射入接收器入射孔),直至用手指通过上、下两光电门时,专用毫秒计能正常计时. 5.按动YJ-LG-3自由落体重力加速度测定仪专用毫秒计功能键(使用方法见附录),选择计时精度为0.0001s,(测完一组数据后,按动复位键归零). 6.用手指托住钢球至落球定位孔,迅速松开手指,记录钢球自由下落通过上、下两光电门的时间t1。 7.用卷尺置于两光电门之间,测出两激光束之间的距离S1。 8. 重复以上步骤,测量八组数据,求平均值. 9.重复以上步骤,改变两光电门距离,用卷尺置于两光电门之间,测出两激光束之间的距离S2,测量八组t2数据,求平均值. 10.将实验数据填入下表.并按式(8)计算重力加速度g.求其误差. 机械工程测试技术基础 目录 1.简介 2.测试方案设计 3.测试系统组成 3.1压电加速度传感器 3.1.1组成 3.1.2工作原理 3.1.3灵敏度 3.2电荷放大器 3.2.1测试电路图 3.2.2数据计算处理 3.3动态信号分析仪 4.实验测试流程 5.说明总结 6.参考文献 压电加速度测试系统 1.简介 现代工业和自动化生产过程中,非电物理量的测量和控制技术会涉及大量的动态测试问题。所谓动态测试是指量的瞬时值以及它随时间而变化的值的确定,即被测量为变量的连续测量过程。它以动态信号为特征,研究了测试系统的动态特性问题,而动态测试中振动和冲击的精确测量尤其重要。振动与冲击测量的核心是传感器,常用压电加速度传感器来获取冲击和振动信号。 压电式传感器是基于某些介质材料的压电效应,当材料受力作用而变形时,其表面会有电荷产生,从而实现非电量测量。压电式传感器具有体积小,质量轻,工作频带宽,结构简单,成本低,性能稳定等特点,因此在各种动态力、机械冲击与振动的测量以及声学、医学、力学、宇航等方面都得到了非常广泛的应用。 所以在此设计了一种压电式加速度测试系统,能够满足测试0—3G的低频率加速度测试。 2.测试方案设计 系统组成:压电加速度传感器、电荷放大器、动态信号分析仪 被测对象的振动加速度信号经传感器拾振,由传感器电缆将加速度信号送入该系统电荷放大器,电荷放大器将信号转换成电压信号并放大,通过数据采集测试仪采样,便实现对信号的采集。 最后在PC 端对实验数据进行处理并显示。 如下图所示 3.测试系统组成 3.1压电加速度传感器 3.1.1组成 由质量块、压电元件、支座以及引线组成 如下图所示 3.1.2工作原理 压电加速度传感器采用具有压电效应的压电材料作基本元件,是以压电材料受力后在其表面产生电荷的压电效应为转换原理的传感器。这些压电材料,当沿着一定方向对其施力而使它变形时,内部就产生极化现象 ,同时在它的两个相对的表面上便 产生符号相反的电荷;当外力去掉后,又重新恢复不带电的状质压电 元件支座输出引线三轴加速度传感器在跌倒检测中的应用
完整版三轴数字加速度传感器ADXL345技术资料
测量重力加速度实验Acceleration due to gravity
重力加速度测量设计性试验
(完整版)重力加速度的测定实验报告
三轴加速度传感器
三轴加速度传感器MMA7260
实验2 重力加速度的测量
速度、加速度的测定和牛顿运动定律的验证
三轴加速度传感器的步态识别系统==
实验一 自由落体重力加速度的测定
加速度测试系统设计