三维姿态实时显示的小型无人机飞控仿真系统
三维姿态实时显示的小型无人机飞控仿真系统
作者:张云洲, 胡禹超, 吴成东, 宋云宏, ZHANG Yun-zhou, HU Yu-chao, WU Cheng-dong, SONG Yun-hong
作者单位:张云洲,胡禹超,吴成东,ZHANG Yun-zhou,HU Yu-chao,WU Cheng-dong(东北大学信息科学与工程学院,辽宁沈阳,110819), 宋云宏,SONG Yun-hong(奥维通信股份有限公司,辽宁沈阳,110179)
刊名:
实验室研究与探索
英文刊名:Research and Exploration in Laboratory
年,卷(期):2015,34(1)
参考文献(15条)
1.董苗波,孙增圻基于PC机的无人机仿真系统开发[期刊论文]-系统仿真学报 2004(7)
2.周志久,韦闽峰无人机飞行控制仿真系统研究[期刊论文]-航天控制 2010(1)
3.Peng Lu;Qingbo Geng Real-time Simulation System for UAV Based on Matlab/Simulink 2010
4.Zhi-hua Qiao;Yi-bo Li;Shao-peng Kang Design of UAVTelepresence and Simulation Platform Based on VR 2008
5.Serdar Ates;Ismail Bayezit;Gokhan Inalhan Design and Hardwarein-the-Loop Integration of a UAV Micro-avionics System in a Manned-Unmanned Joint Airspace Flight Network Simulator 2009
6.A.Mancini;A.Cesetti;A.IualèA Framework for Simulation and Testing of UAVs in Cooperative Scenarios 2009
7.Jianan Wu;Wei Wang;Jinhong Zhang Research of A Kind of New UAV Training Simulator Based on Equipment Simulation 2011
8.ArduPilot Mega Development Team ArduPlane Instruction
9.Jon S.Berndt JSBSim Reference Manual 2011
10.JSBSim Project Team JSBSim Flight Dynamics Model
11.陈兵,朱纪洪,孙增圻基于PC机的无人机仿真系统[期刊论文]-系统仿真学报 2002(5)
12.Paw Y C;Balas G J Development and application of an integrated framework for small UAV flight control development 2011(05)
13.Jin Guo-dong;Gu liang-xian;Lu Li-bin UAV Simulator-Based Simulation of Flight Control System 2009
14.Richard Garcia;Laura Barnes Multi-UAV Simulator Utilizing XPlane 2010(04)
15.刘小雄,章卫国,王振华,李广文无人机自适应编队飞行控制设计与仿真[期刊论文]-系统仿真学报 2009(5)
引用本文格式:张云洲.胡禹超.吴成东.宋云宏.ZHANG Yun-zhou.HU Yu-chao.WU Cheng-dong.SONG Yun-hong三维姿态实时显示的小型无人机飞控仿真系统[期刊论文]-实验室研究与探索 2015(1)
医学护理三维虚拟仿真系统
医学护理虚拟仿真系统 1.产科护理虚拟仿真软件 1)四步触诊:可以完整、清楚地展示四步触诊的步骤,从多个模式、多个方位对操作步骤逐一进行观看,例如,在透视模式下可以显示出子宫内胎儿情况。 2)平产接生:从接产前准备到接产步骤:完整、清楚地展示平产接生的步骤,从多个模式、多个方位对操作步骤逐一进行观看,例如,可以通过三维交互操作,身临其境地练习接生手法。 3)人工流产:完整、清楚地展示人工流产的操作步骤,从多个模式、多个方位对操作步骤逐一进行观看,例如,在剖视模式下可以直观显示出器械在阴道和子宫内部的具体情况。 4)影响产妇的四个因素:可以完整、清楚地展示产力(子宫收缩力、腹壁肌及膈肌收缩力、肛提肌收缩力),产道,胎儿的相互关系,从多种模式、多个方位观看相关肌肉收缩情况。
5)臀位助产:完整、清楚地展示臀位助产的操作步骤,从多个模式、多个方位对操作步骤逐一进行观看,例如,在透视模式下可以显示出胎儿与子宫的变化关系。 6)分娩机制:在原理模式下,可以清楚了解每个步骤胎头各相应径线和骨盆入口平面、中骨盆平面及出口平面的相互关系。可以观察到胎头的前囟门和后囟门。 2.基础护理三维仿真软件 1)心肺复苏:可以完整、清楚、准确地展示心肺复苏的步骤,从多个模式、多个方位对操作步骤逐一进行观看,例如,可以在三维透视模式下显示病人心肺内部三维结构的变化情况。
2)留置导尿术:通过三维泌尿系统和导尿管真实模拟出导尿管在尿道内的位置关系和运动反馈;例如,可以在透视和剖视模式下观看导尿管通过尿道的过程。 3)静脉输液:可以完整、清楚、准确地展示对患者的评估核对,七步洗手法洗手,戴口罩,用物准备,操作过程。可以从多个方位观看如何选静脉,如何持针、如何插针,如何固定,如何拔针等,例如可以在三维透视模式下查看静脉内部结构,针头与静脉的位置关系等。 4)鼻饲法:通过三维消化系统和导管真实模拟出导管在体内的位置距离,吞咽时食道的变化,误插入管,患者出现的咳嗽、呼吸困难、发绀的症状;例如,可以在透视和剖视模式下观看口腔和食道内的插管过程。 福建水立方三维数字科技有限公司是一家专注于虚拟仿真/VR/AR/MR技术在医学护理领域应用软件及系统的研发和推广的高新技术企业。公司专注于助产、护理、基础医学、中医学等医学三维虚拟仿真技术的研发。公司的主要产品(服务)包括:提供VR虚拟现实系统、MR/AR系统、3D交互墙、大型Cave系统等解决方案,构建实验教学平台、微创手术系统、教育培训系统、虚拟仿真平台。 公司为福建省高新技术企业,也是目前国内首家的集VR/AR临床医学培训+解决方案+平台建设于一体的高新技术企业。“公司自成立以来,已相继研发出"
三维仿真火灾场景复原系统
三维仿真火灾场景复原系统 产品简介 三维仿真火灾场景复原系统实现三维仿真地理信息数据与消防专题信息无缝整合,是由三维数字化图形仿真软件和360°全自动机器人拍摄系统组成。是北京金视和科技股份有限公司集十几年来图形图像和三维仿真领域的尖端科研成果,并结合多年来对消防系统的调研数据进行定制化开发的解决方案。在产品开发过程中,公司聘请多位火灾现场勘查技术专家作为技术顾问团队,通过全国各地消防部门对火灾事故现场模拟复原分析系统多年的使用意见和反馈信息,不断将产品完善改进至今。 开发背景 为减少人员伤亡、财产损失,提高在特殊火灾和灾害事故处置行动中的成功率,除了加强消防队伍建设和装备建设,更重要的是加强培训基地和模拟训练设施建设,推动训练手段的模拟化和训练场地的基地化。因此很有必要建设一套能逼真地模拟真实火灾环境的消防训练系统。适用于火灾事故现场全景重建、三维重建、现场痕迹物证提取和保存、现场图像绘制以及火灾事故过程分析等环节的规范操作,满足了消防系统对于火灾事故现场绘图、现场三维重建和火灾事故过程模拟分析等标准化工作流程的需求。 产品特点 1、案发现场360度全景数据全自动采集 可以将案发现场图像最终以360°全景图像的形式呈现,并且全景图像中无拼缝或拼接瑕疵。同时在全景中具有方位罗盘定向功能,来确定方向或导航。 2、可结合地理信息系统全方位呈现案发现场 可结合案发现场的地图信息(谷歌地图和百度地图等地图信息系统),同时还可将案发现场全景图与之相关联,全方位呈现案发现场。 3、鼠标拖拽创建逼真的人物动画模拟 三维人物和车辆模型可以简单的创建过程动画模拟,动画创建过程简单快捷,用鼠标右键拖拽来设定人物动作路径,并且结合丰富的人物动作资源,来创建逼真的人物动画。在创建多个人物动画时,多个人物可以实时联动。
轻小型民用无人机系统运行管理暂行规定(征求意见稿)
中国民用航空局飞行标准司 编号:AC-91-FS-2015-XX 咨询通告下发日期:2015年XX月XX日 编制部门:FS
目录 1.目的 (3) 2.适用范围及分类 (3) 3.定义 (4) 4.民用无人机机长的职责和权限 (7) 5.民用无人机驾驶员 (8) 6.民用无人机使用说明书 (8) 7.禁止粗心或鲁莽的操作 (8) 8.摄入酒精和药物的限制 (8) 9.飞行前准备 (9) 10.限制区域 (9) 11.视距内运行(VLOS) (10) 12.视距外运行(BVLOS) (10) 13.民用无人机运行的仪表、设备和标识要求 (11) 14.管理方式 (11) 15.无人机云提供商须具备的条件 (13) 16.植保无人机运行要求 (14) 17.无人飞艇运行要求 (16) 18.废止和生效 (16)
1.目的 近年来,民用无人机的生产和应用在国内外蓬勃发展,特别是低空、慢速、轻小型无人机数量快速增加,占到民用无人机的绝大多数。为了规范轻小型民用无人机的运行,依据CCAR-91部,发布本咨询通告。 2.适用范围及分类 本咨询通告适用于轻小型民用无人机运行管理。其涵盖范围包括: 2.1空机重量小于等于116千克、起飞全重小于150千克的无人机,且动能不大于95千焦,校正空速不超过100千米每小时; 2.2植保类无人机; 2.3充气体积在4600立方米以下的无人飞艇; 2.4本咨询通告适用于除I类以外的所有轻小型无人机,某些特定条款中仅适用于特定类别无人机的内容将在条款中另行说明。 2.5 轻小型无人机运行管理分类:
空机重量(千克)0-11-7 7-15 15-116 起飞全重(千克)0-1.5 1.5-15 15-25 25-150 分类 I II III IV 植保无人机V 无人飞艇VI 超视距运行I、II类无人机VII 注①:当按照空机重量和起飞全重分类不同时,优先按空机重量分类。 注②:VII类无人机,不包括100米以内超视距运行。 注③:地方政府对于I、VII类无人机重量另有规定的,以地方政府的具体要求为准。 3.定义 3.1无人机(UA: Unmanned Aircraft),是一架由控制站管理(包括远程操纵或自主飞行)的航空器,也称远程驾驶航空器(RPA: Remotely Piloted Aircraft)。 3.2无人机系统(UAS: Unmanned Aircraft System),也称远程驾驶航空器系统(RPAS: Remotely Piloted Aircraft Systems),是指由无人机、相关控制站、所需的指令与控制数据链路以及批准的型号设计规定的任何其他部件组成的系统。 3.3无人机系统驾驶员,由运营人指派对无人机的运行负有必不可少职责并在飞行期间适时操纵无人机的人。
三维虚拟仿真大纲
《三维虚拟仿真》课程教学大纲 课程编号:(暂可不写) 课程名称:三维虚拟仿真 总学时数和学分:本课程计划144学时,8学分 实验或上机学时:108学时 先修及后续课程要求: 先修课程: 1. 3ds max基础:要求学生了解3ds max各个功能模块和基本制作流程。掌握常用工具及简单模型的制作方法、掌握基础灯光、材质的调节方法。 2. 图形图像处理PS:要求掌握常用工具的使用方法,把握图层、蒙版、图层样式以及图层叠加方式的作用和意义,熟练掌握调色工具及滤镜的使用,深入理解通道的作用。 后续课程:《工作室实训》、《毕业设计》 (说明部分) 1.课程性质 三维虚拟仿真是利用计算机图形学技术,在计算机中对真实的客观世界进行逼真的模拟再现。通过利用传感器技术等辅助技术手段,让用户在虚拟空间中有身临其境之感,能与虚拟世界的对象进行相互作用且得到自然的反馈,并让人产生构想。本课程通过3ds max软件强大的三维图像技术制作出逼真的虚拟空间环境,再通过VRP平台加入交互功能,从而形成一种超现实的虚拟体验。本课程主要解决如
何生成具有真实感的虚拟空间,通过3ds max的建模工具创建场景模型,通过材质贴图以及灯光的综合应用模拟自然世界的真实质感及光影效果,再通过渲染设置调节出最终效果。最后使用贴图烘焙的方式将最终渲染效果转为贴图贴回场景,并导入到VRP中进行交互式制作。本课程是一门综合性学科,与其相关的学科种类繁多,如计算机视觉、数字图像处理、模式识别、人工智能、计算机网络、科学计算可视化、输入输出设备、人机交互、自动化控制、生理学、心理学等,其与虚拟现实都有十分紧密的联系。本课程重点在于如何在计算机中生成虚拟环境并通过VRP平台将其转化为具有交互功能的空间环境。其中需要大量的实践决定了本课程主要以技法为主,并兼顾理论的学习。能制作出完整、真实的交互式虚拟场景是本课程的最终教学目的。 2.教学目标及意义 本门课教学目标在于使学生在熟练地掌握3ds max软件的基础之上系统的学习VRP交互式平台软件。在熟练掌握模型创建、材质贴图的赋予、灯光布光方案及调节方法的基础上,创建出具有沉浸感与交互性的虚拟现实作品。借助本系强大的工作室电脑硬件及所购的20节点VRP软件可以进行大型场景的虚拟现实作品表现。使学生在校园里就能拥有公司级别的制作条件,为优秀作品的制作提供了先决条件,并使学生在实战训练中提高其市场竞争力,为进军这一新兴行业奠定坚实的基础。 3.教学内容及教学要求 一、场景模型的创建。(50学时)
无人机培训教材
第一章 飞行原理 本章介绍一些基本物理观念,在此只能点到为止,如果你在学校已上过了或没兴趣学, 请跳过这一章直接往下看。 第一节 速度与加速度 速度即物体移动的快慢及方向,我们常用的单位是每秒多少公尺〔公尺 /秒〕 0 加速度即速度的改变率, 我们常用的单位是〔公尺 /秒/秒〕,如果加速度是负数, 则代表 减速。 第一定律:除非受到外来的作用力,否则物体的速度 (V )会保持不变。 没有受力即所有外力合力为零,当飞机在天上保持等速直线飞行时,这时飞机所受的合 力为零,与一般人想象不同的是,当飞机降落保持相同下沉率下降, 这时升力与重力的合力仍 是零,升力并未减少,否则飞机会越掉越快。 第二定律:某质量为 m 的物体的动量(P = mv )变化率是正比于外加力 F 并且发生在力的方向 上。 此即着名的 F=ma 公式,当物体受一个外力后,即在外力的方向产生一个加速度,飞机 起飞滑行时引擎推力大于阻力, 于是产生向前的加速度,速度越来越快阻力也越来越大, 引擎推力会等于阻力,于是加速度为零,速度不再增加,当然飞机此时早已飞在天空了。 第三定律:作用力与反作用力是数值相等且方向相反。 第三节 力的平衡 如果不平衡就是合力不为零,依牛顿第二定律就会产生加 X 、Y 、Z 三个轴力的平衡及绕 X 、Y 、Z 三个轴弯矩的平衡。 轴力不平衡则会在合力的方向产生加速度,飞行中的飞机受的力可分为升力、重力、阻 力、推力〔如图1-1〕,升力由机翼提供,推力由引擎提供,重力由地心引力产生,阻力由空 气产生,我们可以把力分解为两个方向的力,称 X 及y 方向〔当然还有一个z 方向,但对飞 机不是很重要,除非是在转弯中〕,飞机等速直线飞行时X 方向阻力与推力大小相同方向相反, 故X 方向合力为零,飞机速度不变,y 方向升力与重力大小相同方向相反,故 y 方向合力亦为 第二节 顿三大运动定律 迟早 你踢门一脚,你的脚也会痛, 因为门也对你施了一个相同大小的力 作用于飞机的力要刚好平衡, 速度,为了分析方便我们把力分为
虚拟仿真实训系统解决方案
大娱号 虚拟仿真实训系统解决方案 VSTATION HD(V1.0)
前言 近年来,由于信息技术的快速发展与国家教育部门的大力提倡,虚拟仿真实训在高职教育中开始得到广泛的应用,成为实训教学重要的组成部分和提高教学质量的重要手段。虚拟仿真技术是将多媒体技术、虚拟现实技术与网络通信技术等信息技术进行集成,构建一个与现实世界的物体和环境相同或相似的虚拟教学环境,并通过虚拟环境集成与控制为数众多的实体,构成一个虚拟仿真教学系统。虚拟仿真教学技术以提高学生的技能水平为核心,具有多感知性、沉浸性、交互性、构想性等特点。这些特点有益于教师的实训教学和学生专业核心技能的训练,为解决职业教育面临的实训难、实习难和就业难等问题开辟了一条新思路。目前,高职院校很多专业,如外语教学、旅游专业、数控技术、焊接技术、机电技术、食品加工、服装设计等专业都引入了虚拟仿真实训教学方式。虚拟仿真实训教学,已经逐渐成为高职院校教学变革的一种有效手段。
目录 前言 (2) 一、总体需求分析 (4) 1.1 “情景”的定义: (4) 1.2 为什么要在教学中使用“虚拟仿真实训系统”? (5) 1.3 根据教学建设,用户需求归纳如下: (6) 二、设计原则 (7) 三、大娱号虚拟仿真实训系统概述 (8) 四、大娱号虚拟仿真实训系统系统运行原理示意图: (10) 五、大娱号虚拟仿真实训系统构成及特点 (11) 六、与教材同步完备的虚拟场景库 (16) 七、大娱号虚拟仿真实训系统构成及特点 (18) 八、大娱号虚拟仿真实训系统配置与指标 (19) 九、系统技术支持及服务 (21)
一、总体需求分析 通过运用学语言,已经为越来越多的教师认同。学习者必须通过“用语言”才能真正掌握语言。 让学生置身于真实的交际情景中,让学生使用语言进行交际。而真正的交际应该是互动的。当一方发出信息后,另一方根据上下文进行意义协商,作出反馈,他可以表示支持、进行反驳或提出疑问,然后接受方对反馈意见再进行意义协商,作出回应,双方如此反复交流,形成互动。互动是“交际的核心”。 语言课堂就是一个充满“交流和互动”的场所。在课堂教学中,这种互动不仅包括师生互动和生生之间互动,还应该包括教材,因为课堂上的师生互动和生生互动都是基于一定教材展开的。“大娱号”虚拟仿真实训系统能够在教材与师生之间搭起一座互动教学的桥梁。 使用“虚拟仿真实训系统”在互动教学的设计和组织上突出情景性、实训性和互动性,力求三者有机结合。 1.1 “情景”的定义: 情景指的是具体场合的情形或景象。在教学过程中引入或创设生动具体的场景,有利于学生进行意义建构使其产生交际的动机。“大娱号”虚拟仿真实训系统所提供的虚拟场景可以提供直观生动的形象,通过大屏或投影再现学生在虚拟场景中的表演,可以让学生通过视觉和听觉去感受场景,产生想象和联想,激发学生的学习兴趣。参与表演的学生可以身临其境的学语言,使用虚拟仿真实训系统教学, 学生觉得有话可说,有戏可演,
消防人员三维仿真模拟培训系统
消防人员三维仿真模拟培训系统 一、产品简介 消防人员三维仿真模拟培训系统实现三维仿真地理信息数据与消防专题信息无缝整合,是由三维数字化图形仿真软件和360°全自动机器人拍摄系统组成。是北京金视和科技股份有限公司集十几年来图形图像和三维仿真领域的尖端科研成果,并结合多年来对消防系统的调研数据进行定制化开发的解决方案。在产品开发过程中,公司聘请多位火灾现场勘查技术专家作为技术顾问团队,通过全国各地消防部门对火灾事故现场模拟复原分析系统多年的使用意见和反馈信息,不断将产品完善改进至今。 二、开发背景 为减少人员伤亡、财产损失,提高在特殊火灾和灾害事故处置行动中的成功率,除了加强消防队伍建设和装备建设,更重要的是加强培训基地和模拟训练设施建设,推动训练手段的模拟化和训练场地的基地化。因此很有必要建设一套能逼真地模拟真实火灾环境的消防训练系统。适用于火灾事故现场全景重建、三维重建、现场痕迹物证提取和保存、现场图像绘制以及火灾事故过程分析等环节的规范操作,满足了消防系统对于火灾事故现场绘图、现场三维重建和火灾事故过程模拟分析等标准化工作流程的需求。 三、产品特点 1、案发现场360度全景数据全自动采集 可以将案发现场图像最终以360°全景图像的形式呈现,并且全景图像中无拼缝或拼接瑕疵。同时在全景中具有方位罗盘定向功能,来确定方向或导航。 2、可结合地理信息系统全方位呈现案发现场 可结合案发现场的地图信息(谷歌地图和百度地图等地图信息系统),同时还可将案发现场全景图与之相关联,全方位呈现案发现场。 3、鼠标拖拽创建逼真的人物动画模拟 三维人物和车辆模型可以简单的创建过程动画模拟,动画创建过程简单快捷,用鼠标右键拖拽来设定人物动作路径,并且结合丰富的人物动作资源,来创建逼真的人物动画。在创建多个人物动画时,多个人物可以实时联动。 4、海量专业的三维模型资源库(达两万多种三维模型资源) 系统涵盖专业的三维模型资源库,涵盖生活中的所能遇到的室内和室外基本物品,数量在2万种模型以上,可以实时的用鼠标拖拽添加到系统中,并且可以根据现场图像的比例进行旋转,移动和缩放。 5、三维模型与真实现场图像增强现实融合 可以将三维模型资源库中的人物、车辆、物品等模型直接拖拽到全景图中,并且可以对人物和车辆进行动画的创建,基于真实的案发现场图像模拟案发过程。 6、三维立体现场门、窗一键快速自动生成 在三维立体案发现场中可以根据现场实际需要,在创建的墙体上任意添加门和窗,并且可以设定门窗的位置、高度、宽度、数量等。 四、适用人群
双gpsins组合导航系统在无人机飞控系统的应用终审稿)
双G P S I N S组合导航系统在无人机飞控系统的 应用 Pleasure Group Office【T985AB-B866SYT-B182C-BS682T-STT18】
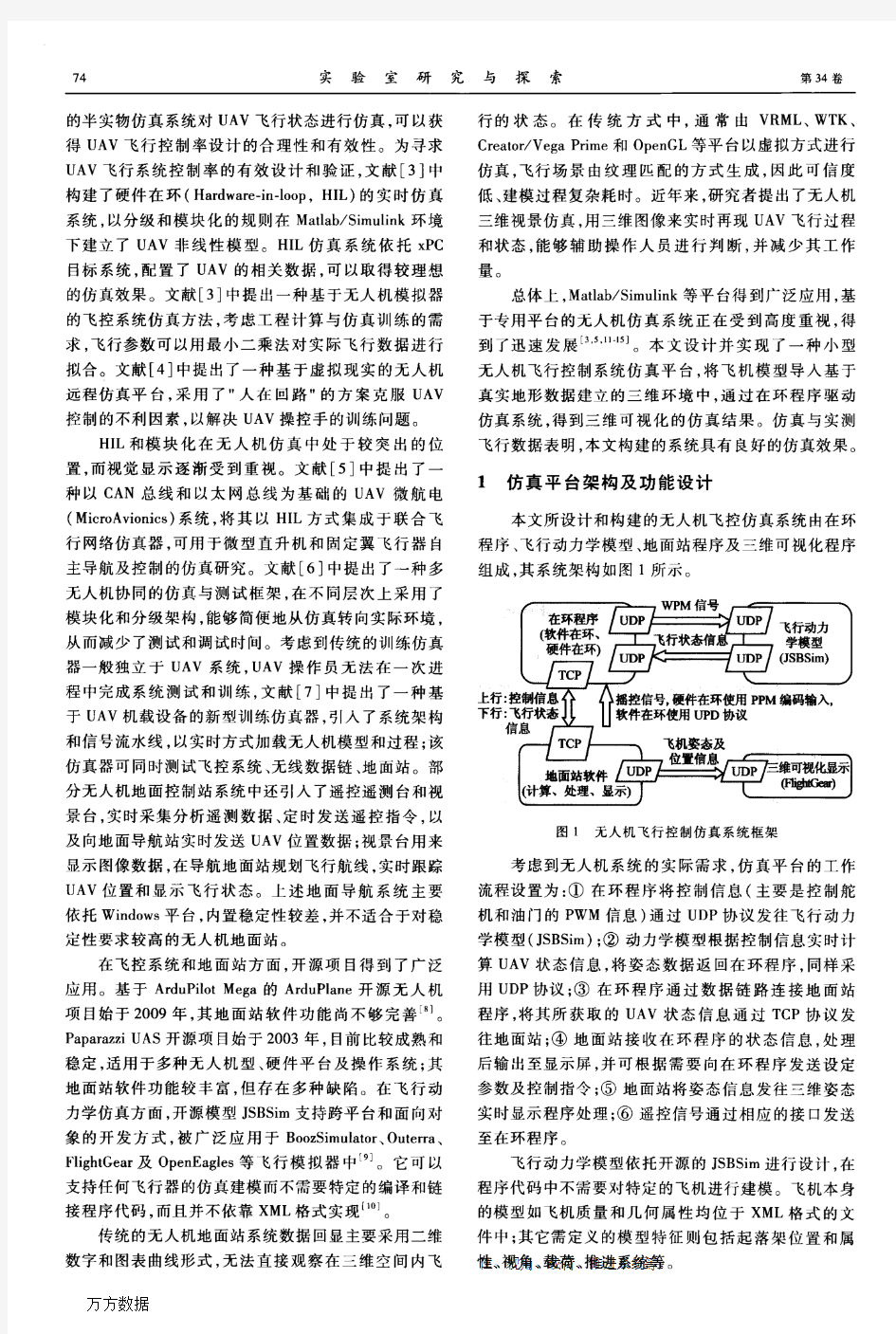
双GPS+INS组合导航系统在无人机飞控系统的应用 1背景 无人驾驶飞机是一种有动力、可控制、能携带设备、执行多种任务、并能重复使用的无人驾驶航空器,简称无人机(Unmanned AenM Vehicle缩写UAV)。自1913年世界上出现第一个自动驾驶仪以来,无人机受到越来越多国家的重视,发展迅猛。目前从事研究和生产无人机的有中国、美国、俄罗斯、以色列、法国、英国和南非等近3O个国家,无人机基本型数量已增加到多种。鉴于其独有的低成本、低损耗、零伤亡、可重复使用和高机动等诸多优势,其使用范围已拓宽到军事、民用和科学研究三大领域。在军事上可用于照相侦察、信号情报搜集、布撒雷达干扰箔条、防空火力诱饵、防空阵地位置标识、直升机航路侦察,为武器系统提供目标定位、目标指示、目标动态监视和目标毁伤评估的实时情报等;在民用上,可用于农作物种植和施播、救护定位、桥梁大坝检测、输油管、天然气管道、悬挂电缆、铁路、高压线的监视,公路交通及危险品的运输监视等;在科学研究上,可用于大气研究、对核生化污染区的取样与监控、新技术新设备与新飞行器的试验验证等。随着航空技术的发展以及对无人机越来越广泛的需求,无人机飞控系统向着高精度、小型化、数字化方向发展。高精度要求无人机的导航控制精度高、稳定性好、并且实时性要求高,能够适应复杂的外界环境,因此控制和信号处理算法比较复杂、计算速度快、精度高。小型化则对驾驶仪系统的重量和体积提出了更高的要求,要求处理和控制计算机的性能越高越好,体积越小越好。这些条件在设计系统时都要综合考虑以达到最优化的性能设计。
AOPA无人机驾驶证模拟题汇总
1、空中交通管制单位为飞行中的民用航空器提供的空中交通服务中含有(1 分) A.飞行情报服务B.机场保障服务C.导航服务 2、空域管理的具体办法由________制定(1 分) A.民用航空局B.中央军事委员会C.国务院和中央军事委员会 3、空域通常划分为①机场飞行空域②航路.航线③空中禁区.空中限制区和空中危险区 ________(1 分) A.①②B.①③C.①②③ 4、机场标高指着陆区______的标高。(1 分)p143 A.最高点B.最低点C.平均海拔 5、______主要用于飞行区域内重点目标的标注,如建筑物、禁飞区、人口密集区等易影响飞行安全的区域(1 分) A.场地标注B.任务区域标注C.警示标注 6、飞机过载和载荷因子是同一概念________(1 分) A.是B.不是C.不确定 过载:作用在飞机上的气动力和发动机推力的合力与飞机重力之比,载荷因子:是飞行时的作用于飞机的全部负荷和飞机总重。 7、无人机特殊飞行许可颁发前,由局方检察官或局方认证人员或__________进行检查以确定位于预期的飞行是安全的。(1 分) A.适当认证修理站 B.经验丰富的无人机飞行员 C.经验丰富的有人机飞行员 8、无人机系统无线电资源的使用__________局方无线电管理部门的许可证。(1 分)A.需要B.不需要C.一般情况下不需要 9、关于粗猛着陆描述正确的是________(1 分) A.粗猛着陆就是使飞机接地的动作太快 B.不按规定的着陆高度、速度及接地角,导致受地面撞击力超过规定 C.粗猛着陆时前轮先接地 10、谁对民用无人驾驶航空器系统的维护负责(1 分) A.签派B.机长C.运行人 11、可能需要处置的危机情况不包括:______ (1 分) A.动力装置故障B.任务设备故障C.舵面故障 12、活塞发动机在慢车状态下工作时间过长,易带来的主要危害是________(1 分) A.电嘴挂油积炭B.滑油消耗量过大C.气缸头温度过高
无人机城市可视化管理系统方案
无人机的城市可视化管理系统技术方案书
目录 1. 项目背景 ...................................... 错误!未定义书签。 2. 系统结构 ...................................... 错误!未定义书签。 硬件系统 ...................................... 错误!未定义书签。 巡检无人机................................ 错误!未定义书签。 软件系统 (6) 账户注册、登录............................ 错误!未定义书签。 3. 售后及运维 .................................... 错误!未定义书签。 4. 相关案例 ...................................... 错误!未定义书签。 5. 公司介绍 ...................................... 错误!未定义书签。
1.项目背景 随着城市管理精细化程度的提升,要求我们在城市日常管理中的方法不断推陈出新,探索新的高效的管理手段是大势所需。无人机作为一项空中视野的管理工具,在城市管理中有不可或缺的地位。无人机可以搭载采集数据所需的设备,在特殊情况下进行空中数据采集;其在采集过程中的图像和视频可以实时回传到管理中心,使得地面控制人员实时掌握信息,并根据掌握的信息控制和调整无人机的飞行状态和路径;无人机”在整治脏乱差、监督占道经营、流动设摊、高空违建、建筑工地管理、四位一体巡查河道等取证方面优势更明显,通过航拍,执法死角一览无遗,提高了市容环境综合整治效率。 但目前城市管理部门在无人机的使用上没有很好的管理过程,不论是采购的无人品牌型号不一,使用的能力高低不等,使用的模式和目标也没有统一的合理的规划,没有引入先进科技对无人机进行科学管控,导致无人机在城市管理上没有得到很好的利用。只有通过规范统一的进行无人机采购,使用培训,才能建立良好的无人机操控基础;引入先进技术,才能精准控制无人机进行作业;对功能模块进行标准配备,才能更科学地进行高效执行和集中管理。
基于Arena的港口泊位三维仿真系统的实现
第3卷第1期 System Simulation Technology V ol. 3, No.1 中图分类号:TP39 文献标识码:A 基于Arena 的港口泊位三维仿真系统的实现 王永辉,胡青泥,舒宏 (大连理工大学机械工程学院,辽宁,116023) 摘要:本文在三维仿真软件Arena 3DPlayer平台上实现了港口泊位作业系统的三维动画仿真。首先分析了港口泊位作业系统并利用Arena对该系统进行了二维仿真模拟,然后给出该系统在Arena 3DPlayer平台上三维仿真动画的实现过程,最后总结了其中的关键技术。 关键词:港口泊位;Arena;Arena 3DPlayer;三维仿真 Implementation of Berth 3D Animation Simulation System Based on Arena W ANG Yonghui, HU Qingni, SHU Hong (School of Mechanical Engineering, Dalian University of Technology, Liaoning, 116023) Abstract: The paper presents a 3D Simulation model of berth operation system in a container terminal using the Arena 3DPlayer. The author analyzes and models the berth operation system with Rockwell Arena, and animates the model with 2D animation tools, then, the working flow of 3D Simulation is proposed based on Arena 3DPlayer, finally, the key technology of Arena 3D simulation is summarized. Keywords: berth; Arena; Arena 3DPlayer; 3D simulation 1 引言 港口泊位作业过程中存在着许多随机因素,运用系统仿真的方法可以对泊位营运过程进行模拟,通过对仿真输出结果的分析,决策得出在给定的岸线长度条件下,规划合理的泊位数量,用以提高岸线利用率,减少船舶等待时间。 本文利用可视化仿真软件Arena及基于其上开发的Arena 3Dplayer,建立了港口泊位作业系统的仿真模型。该模型具有动画效果和交互功能,可实时演示港口泊位作业系统的服务过程并可以与使用者进行实时交互。2 港口泊位作业系统描述 港口泊位作业系统的服务对象是集装箱船舶,服务设备是港口的所有设施,其中最主要的是供船舶停靠的泊位数量及其装卸设备。 当集装箱船舶到港后,首先需要为其安排泊位,然后再配置相应的装卸设备资源以及堆场空间资源,以便进行装卸作业。由于泊位空间是港口的一种稀缺资源,因此,泊位配置问题是提高集装箱港口效率的关键点之一。 所谓泊位配置问题,就是为到港的集装箱船舶指定适当的位置,供其靠泊作业,以减少船舶的在港时间,提高港口的运作效率。目前,集装箱港口的泊位配置大多是计划人员根据以往经验来安排,
虚拟仿真虚拟现实实验室解决方案
数虎图像提供虚拟仿真实验室硬件设备搭建和内容制作整体解决方案 虚拟现实实验室是虚拟现实技术应用研究就的重要载体。 随着虚拟实验技术的成熟,人们开始认识到虚拟实验室在教育领域的应用价值,它除了可以辅助高校的科研工作,在实验教学方面也具有如利用率高,易维护等诸多优点.近年来,国内的许多高校都根据自身科研和教学的需求建立了一些虚拟实验室。数虎图像拥有多名虚拟现实软硬件工程师,在虚拟现实实验室建设方面有着无与伦比的优越性! 下面请跟随数虎图像一起,让我们从头开始认识虚拟现实实验室。 【虚拟现实实验室系统组成】: 建立一个完整的虚拟现实系统是成功进行虚拟现实应用的关键,而要建立一个完整的虚拟现实系统,首先要做的工作是选择确实可行的虚拟现实系统解决方案。 数虎图像根据虚拟现实技术的内在含义和技术特征,并结合多年的虚拟现实实验室建设经验,最新推出的虚拟现实实验室系统提供以下组成: 虚拟现实开发平台: 一个完整的虚拟现实系统都需要有一套功能完备的虚拟现实应用开发平台,一般包括两个部分,一是硬件开发平台,即高性能图像生成及处理系统,通常为高性能的图形计算机或虚拟现实工作站;另一部分为软件开发平台,即面向应用对象的虚拟现实应用软件开发平台。开发平台部分是整个虚拟现实系统的核心部分,负责整个VR场景的开发、运算、生成,是整个虚拟现实系
统最基本的物理平台,同时连接和协调整个系统的其它各个子系统的工作和运转,与他们共同组成一个完整的虚拟现实系统。因此,虚拟现实系统开发平台部分在任何一个虚拟现实系统中都不可缺少,而且至关重要。 虚拟现实显示系统: ·高性能图像生成及处理系统 ·具有沉浸感的虚拟三维显示系统 在虚拟现实应用系统中,通常有多种显示系统或设备,比如:大屏幕监视器、头盔显示器、立体显示器和虚拟三维投影显示系统,而虚拟三维投影显示系统则是目前应用最为广泛的系统,因为虚拟现实技术要求应用系统具备沉浸性,而在这些所有的显示系统或设备中,虚拟三维投影显示系统是最能满足这项功能要求的系统,因此,该种系统也最受广大专业仿真用户的欢迎。虚拟三维投影显示系统是目前国际上普遍采用的虚拟现实和视景仿真实现手段和方式,也是一种最典型、最实用、最高级别的投入型虚拟现实显示系统。这些高度逼真三维显示系统的高度临场感和高度参与性最终使参与者真正实现与虚拟空间的信息交流与现实构想。 虚拟现实交互系统 多自由度实时交互是虚拟现实技术最本质的特征和要求之一,也是虚拟现实技术的精髓,离开实时交互,虚拟现实应用将失去其存在的价值和意义,这也是虚拟现实技术与三维动画和多媒体应用的最根本的区别。在虚拟现实交互应用中通常会借助于一些面向特定应用的特殊虚拟外设,它们主要是6自
三维仿真实训系统
三维仿真实训系统 一、总体需求 系统主要应用于艺术设计专业课堂教学、项目实训化课程,系统需要给学生提供一个能自由搭配更换的艺术空间的仿真平台,以便于教学中进行不同空间的环境艺术搭配。最终实现艺术设计专业教学和实训的实时化、可视化、仿真化,为艺术设计专业的人才培养模式的创新提供有力的支撑。 二、功能需求 艺术设计空间场景及装饰构件要求:系统具有典型的居住空间和商业空间等场景,系统具有丰富多样的装饰构件,装饰构件涵盖床、沙发、柜子、桌子、椅子、茶几、地毯、灯具、地板、墙纸、窗帘、家电、音响、装饰画、摆件、植物、墙整体壁纸、地面、大门、柱子、吊灯、吊顶、栏杆、沙发、背景墙、电梯、接待台、植物摆件等常见的主要构件类型,以便于教学和实训中进行不同风格的装饰搭配。 三、技术需求 1. 系统采用C/S架构,仿真平台及素材资源均可部署在本机上,能够支持一个班级的学生同时使用。 2. 系统采用开放式设计,空间场景及装饰构件具有良好的可扩展性,可以在后期增加或更换不同风格模型,用户可以定制空间场景及装饰构件。 3. 系统的空间场景及装饰构件均采用3D精细建模制作,所有构件及物品都按实际比例制作构件模型,并且具有空间计算和碰撞检测功能,能够模拟装饰设计过程中对空间场地实际占用情况。 4. 系统具有中文界面简单易用,所有的装饰构件都能够直接点击拖入场景,并且能够及时删除、替换或增加。 5. 系统具有所见即所得的快速呈现功能,能够实时地将装饰搭配的效果直观展现给用户,以便学生在空间装饰搭配时能够及时、准确的把握效果。 6. 系统支持高真实感、高效实时渲染画质。可以利用3dsMax中各种全局光渲染器所生成的光照贴图,使场景具有非常逼真的静态光影效果。 7. 系统具有丰富的脚本库系统,内嵌强大的脚本和函数功能,支持变量和逻辑判断,可对三维场景进行各种控制和交互;脚本支持各类触发方法,支持各种事件触发,包括三维模型和二维按钮的实时点击、弹起、鼠标移入移出。 具体功能与数量见下表:
无人机概述与系统组成
无人机概述及系统组成 无人机( UAV)的定义 无人机驾驶航空器(UA: Unmanned Aircraft ),是一架由遥控站管理(包括远程操纵或自主飞行)、不搭 载操作人员的一种动力空中飞行器,采用空气动力为飞行器提供所需的升力,能够自动飞行或远程引导;既能一次性使用也能进行回收;能够携带致命性和非致命性有效负载。 以下简称无人机。 无人机系统的定义及组成 无人机系统( UAS:Unmanned Aircraft System),也称无人驾驶航空器系统(RPAS:Remotely Piloted Aircraft System),是指一架无人机、相关的遥控站、所需的指令与控制数据链路以及批准的 型号设计规定的任何其他部件组成的系统,无人机系统包括地面系统、飞机系统、任 务载荷和无人机使用保障人员。 无人机系统驾驶员的定义 无人机系统驾驶员,由运营人指派对无人机的运行负有必不可少职责并在飞行期间适时操纵飞行控制的人。 无人机系统的机长,是指在系统运行时间内负责整个无人机系统运行和安全的驾驶员。 无人机和航模的区别 一、定义不同 无人机是一种由无线电遥控设备或自身程序控制装置操纵的无人驾驶飞行器。航 空模型是一种重于空气的,有尺寸限制的,带有或不带有动力装置的,不能载人的航 空器,就叫航空模型。 二、飞行方式不同 唯一的区别在于是否有导航飞控系统,能否实现自主飞行。通俗来说,无人机可以实现自主飞行,而航模不可以,必须由人来通过遥控器控制。也就是无人机的本身是带了“大脑”飞行,可能“大脑”受限于人 工智能,没有人脑灵光。但是航模的“大脑”始终是在地面,在操纵人员的手上。 三、用途不同 无人机更偏向于军事用途或民用特种用途,而航空模型更接近于玩具。昆明劲鹰无人机专业从事航测无人机设备的设计、生产、销售、及航测航拍服务,费用低、技术强、工期短、精度高,是中国技术顶尖
虚拟仿真虚拟现实实验室解决方案
虚拟仿真虚拟现实实验室解决方案
数虎图像提供虚拟仿真实验室硬件设备搭建和内容制作整体解 决方案 虚拟现实实验室是虚拟现实技术应用研究就的重要载体。 随着虚拟实验技术的成熟,人们开始认识到虚拟实验室在教育领域的应用价值,它除了能够辅助高校的科研工作,在实验教学方面也具有如利用率高,易维护等诸多优点.近年来,国内的许多高校都根据自身科研和教学的需求建立了一些虚拟实验室。数虎图像拥有多名虚拟现实软硬件工程师,在虚拟现实实验室建设方面有着无与伦比的优越性! 下面请跟随数虎图像一起,让我们从头开始认识虚拟现实实验室。 【虚拟现实实验室系统组成】: 建立一个完整的虚拟现实系统是成功进行虚拟现实应用的关键,而要建立一个完整的虚拟现实系统,首先要做的工作是选择确实可行的虚拟现实系统解决方案。 数虎图像根据虚拟现实技术的内在含义和技术特征,并结合多年的虚拟现实实验室建设经验,最新推出的虚拟现实实验室系统提供以下组成:
虚拟现实开发平台: 一个完整的虚拟现实系统都需要有一套功能完备的虚拟现实应用开发平台,一般包括两个部分,一是硬件开发平台,即高性能图像生成及处理系统,一般为高性能的图形计算机或虚拟现实工作站;另一部分为软件开发平台,即面向应用对象的虚拟现实应用软件开发平台。开发平台部分是整个虚拟现实系统的核心部分,负责整个VR场景的开发、运算、生成,是整个虚拟现实系统最基本的物理平台,同时连接和协调整个系统的其它各个子系统的工作和运转,与她们共同组成一个完整的虚拟现实系统。因此,虚拟现实系统开发平台部分在任何一个虚拟现实系统中都不可缺少,而且至关重要。 虚拟现实显示系统: ·高性能图像生成及处理系统 ·具有沉浸感的虚拟三维显示系统 在虚拟现实应用系统中,一般有多种显示系统或设备,比如:大屏幕监视器、头盔显示器、立体显示器和虚拟三维投影显示
一种无人机综合测试系统
一种无人机综合测试系统 【摘要】本文根据无人机综合保障设备对自动化测试和地面仿真测试的综合需求,在对无人机航电设备包括导航控制、电气和机电设备测试项目和测试流程进行分析的基础上,提出了完整的综合测试系统总体框架和设计思路。 【关键词】无人机;综合测试系统;PXI总线 1.引言 无人机机载设备综合测试系统是采用现代计算机软件、硬件技术,现代测试和控制技术、测量仪器与仪器总线以及信息综合处理等技术,通过系统硬件和软件的集成构成一个集采集、分析、记录于一体的自动化综合测试系统。该系统采用模块化硬件设计和虚拟仪器软件开发,具有操作操作简便、使用灵活并且易于扩展等特点。 2.系统总体框架 无人机机载设备一般由飞控系统、导航系统、遥控遥测系统、电气系统、发动机电控系统、发射回收装置、有效载荷系统、武器火控系统等组成,综合测试系统主要完成对各个子系统进行单元测试和对无人机系统的综合检测。无人机自动综合测试系统包括以下几个部分组成: (1)测试计算机——主要是工控计算机,是测试系统监测、控制中心。 (2)采集板卡——包括各种程控仪器仪表、激励源、程控开关、程控伺服系统、数据采集板卡等设备,能完成一定具体的测试控制任务。 (3)总线与接口——是连接控制器与各程控仪器、设备的通路,完成消息、命令、数据的传输与交换,包括机械接口插件、插槽、电缆等。 (4)测试与控制软件——为了完成系统测试任务而编制的各种应用软件。例如,测试主程序、驱动程序、I/O软件等。 3.系统硬件设计 3.1 硬件构架 综合测试系统由硬件设备层、设备驱动层、测试任务应用层、人机交互界面四部分组成。系统架构如图1所示: 图1 系统硬件架构框图
无人机航测管理信息系统研究
无人机航测管理信息系统研究 发表时间:2019-12-12T15:24:36.310Z 来源:《工程管理前沿》2019年22期作者:李俊霖 [导读] 随着无人机技术的快速发展,促进了测绘领域的快速发展,推动了测绘技术向现代化、智能化发展的进程摘要:随着无人机技术的快速发展,促进了测绘领域的快速发展,推动了测绘技术向现代化、智能化发展的进程。无人机航测技术已广泛的应用于测绘领域中,如地形测量、位置测量和交通道路等方面。与传统的测绘技术相比而言,无人机航测技术具有明显的优势,因此,在测绘领域得到了广泛的应用和快速的发展。 关键词:无人机;航测管理;信息系统;研究 1无人机航测技术概述 (1)无人机航测技术的原理。无人机航测是以无人机为载体,将数码相机等小型航拍设备装载到无人机上,通过操作无人机,使其按照预先设定好的航线进行飞行,并由航拍设备对待测区域进行数据信息和影像信息收集的一种技术。该种技术是结合了多种现代化技术和手段,具有效率高、成本低、操作灵活等优点,在各个领域得到了广泛的应用。特别是在测绘领域,无人机航测技术的应用能够获得准确、可靠的数据和影像信息,为工程测绘、建设提供了重要依据,有利于工程项目的建设。(2)无人机航测技术的优势。就作业周期来说,无人机的飞行高度在一定程度上决定着作业周期的长短。无人机的飞行高度通常控制在1000m以内,此飞行高度对空域要求不高,在一定程度上提高了无人机飞行的效率,缩短了无人机的作业周期,为后续的工作开展提供充裕的时间。(3)采集的数据信息准确度高。与传统的人机航测相比,无人机航测可以到达一些环境复杂、恶劣的地区进行探测,并且能够采用分辨率较高的摄像头,对测区进行航摄,极大程度上提高了工作质量和增加了工作效果,从而获得高精度的数据信息,进而为工程制定施工方案提供支持。 2无人机航测技术的优点分析 2.1具有高的影像数据分辨率 无人机航测技术是结合无人机技术、GPS定位技术、摄影技术等新型测绘技术,是立足于低空飞行,借助高分辨率的摄影技术实现的。就目前的无人机航测技术来说,在无人机航测过程中所获得的影像数据分辨率可达厘米级。与传统的测绘技术相比,无人机航测技术具有更为宽泛的应用,可是弥补传统测绘技术中人工无法到达的地方,且所获得的数据较传统技术获得的更为准确,较低或消除了由测绘人员操作而存在的误差。因此,无人机航测技术被广泛的应用于矿山地形测量、大面积地形测量等方面。 2.2具有高的数据获取效率 传统的测绘技术所需要的人力、物力资源十分巨大,且所获得的测绘数据周期过长,降低了测量的社会经济效益。无人机航测技术是以现代化的遥测遥控技术、GPS定位技术、低空飞行技术和数据通信技术等为基础发展起来的新兴技术,该技术不需用繁杂的人工操作,具有灵活便捷、采集数据精度高和使用范围大的优点,提高了单位时间内数据采集效率,降低了测绘成本,取得了更高的社会经济效益,具有广阔的应用前景。 2.3具有较强的社会经济效益 无人机航测技术的使用成本较低,且该技术融合了现代化的网络技术、通讯技术、计算机技术等,因此,在无人机航测技术的应用过程中更为便捷,能够实现高效获取航拍数据的目的,导致无人机航测技术的社会经济效益明显提高。此外,无人机航测技术在低空飞行过程中,可以获取较大范围内的航拍影像数据,极为显著的缩短了测绘周期,不仅提供了更高精度的测绘成果,更能节省大量的测绘时间,为现代测绘技术的快速发展奠定了基础。 3无人机航测技术在现代测绘中的应用 无论是无人机航测技术应用于地质灾害防治领域还是地形测绘方面,都是通过航空影像而实现的,其早阶段的操作流程也基本相同。基于此,本文以无人机航测技术在矿山测绘中的应用为例(图1),简要的分析该技术的应用状况。 3.1航测项目中航线的设计和地面控制在使用无人机航测技术过程中,先要充分分析测绘范围的实际情况,如矿山地形环境、面积等状
无人机仿真平台及虚拟测试解决方案
无人机仿真平台及虚拟测试解决方案 概述 近年来无人机在国防和民用领域发展迅速。无人机操控人员的训练、无人 机仿真测试的需求的越来越大。为此,本方案搭建了无人机作战仿真推演平台,该平台能够通过错综复杂的战场仿真来实现进行无人机驾驶员的操控训练,无 人机的智能算法测试,无人机作战性能测试等功能。同时具有功能完善的人机 交互终端和三维视景显示功能。方案介绍1.1 系统架构如下图所示,无人平台仿真平台主要包括四部分内容:作战想定及推演系统、地面站系统、装备仿 真系统(包括无人机系统、有人机系统和其他武器装备系统)、三维视景系统。图中括号内为各子系统中有代表性的货架产品、定制模型和相关硬件平台。系 统各个部分可以通过实时网络进行数据传输。无人装备仿真平台系统组成1.2 系统功能1.2.1 作战想定生成及推演系统作战想定生成及推演系统以Presagis 公司战场仿真推演平台软件STAGE 为核心,可生成作战环境、集成武器装备 模型、植入无人机智能算法、编辑作战想定、完成战场推演功能。1.2.1.1 作战想定生成系统作战想定生成系统包括作战兵力生成和作战任务部署两个部分。 作战兵力生成:主要完成战场中兵力的生成和部署,为整个测试环境提供敌、我、临、指四方面的兵力部署情况以及传感器、武器携带情况,主要由 STAGE 的兵力模型编辑部分完成。?作战兵力设置:STAGE 提供大量作战实体的数学模型,并可以根据需要对这些参数进行设置,自定义武器装备。如果 自带模型不能满足要求,可以接入第三方的细粒度模型或接入半实物仿真系统;?作战兵力布署:根据作战想定对作战实体进行布置。可以精确地布置实体的位置,如设置飞机的坐标、朝向等,也可以在指定区域按一定规则随机布置兵力,如地面防空导弹阵地、地面雷达阵地。