agv综述
AGV综述
一AGV的定义
AGV是无人搬运车(Automated Guided Vehicle)的英文缩写。是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,AGV属于轮式移动机器人(WMR——Wheeled Mobole
Robot)的范畴。
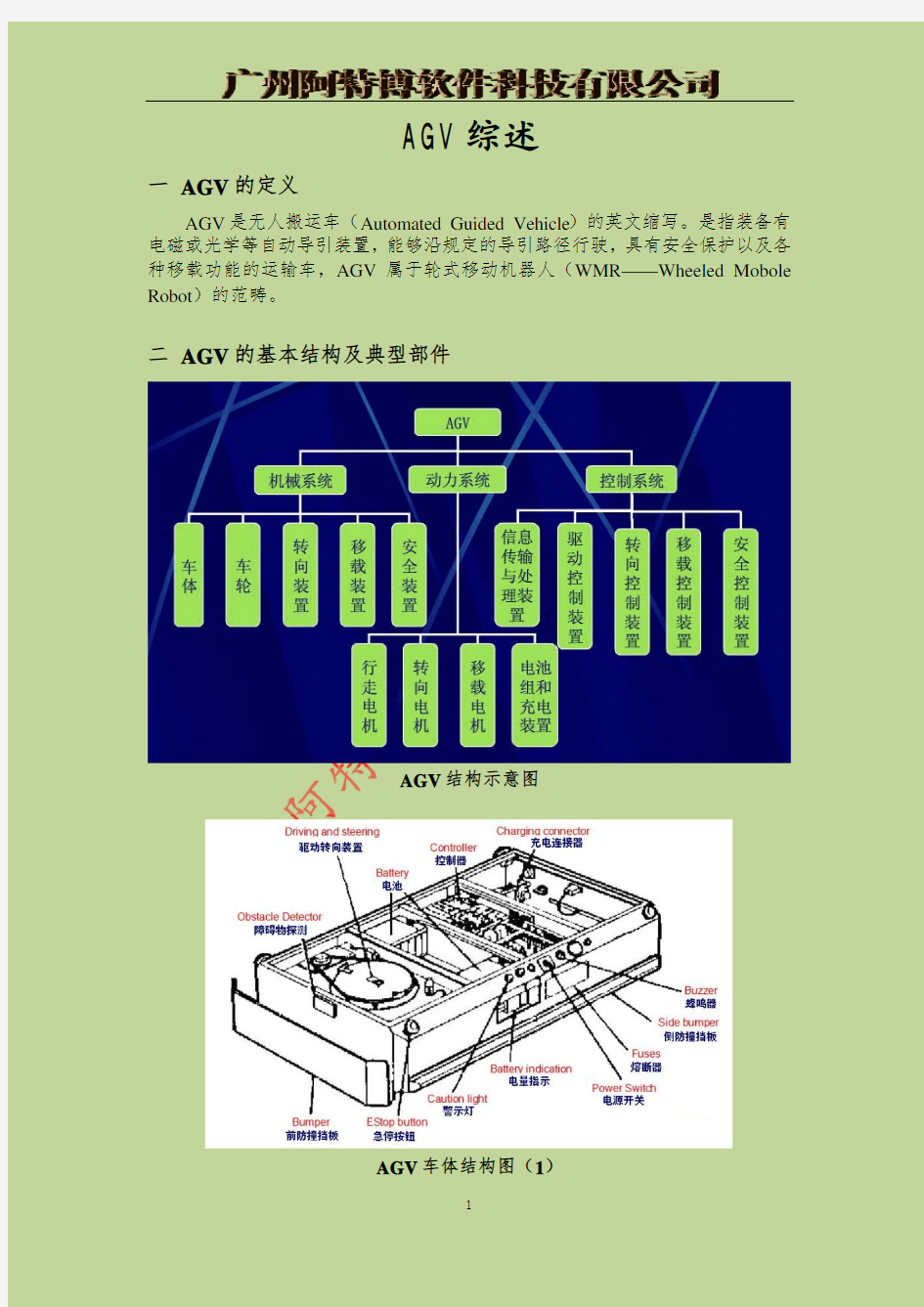
二AGV的基本结构及典型部件
AGV结构示意图
AGV车体结构图(1)
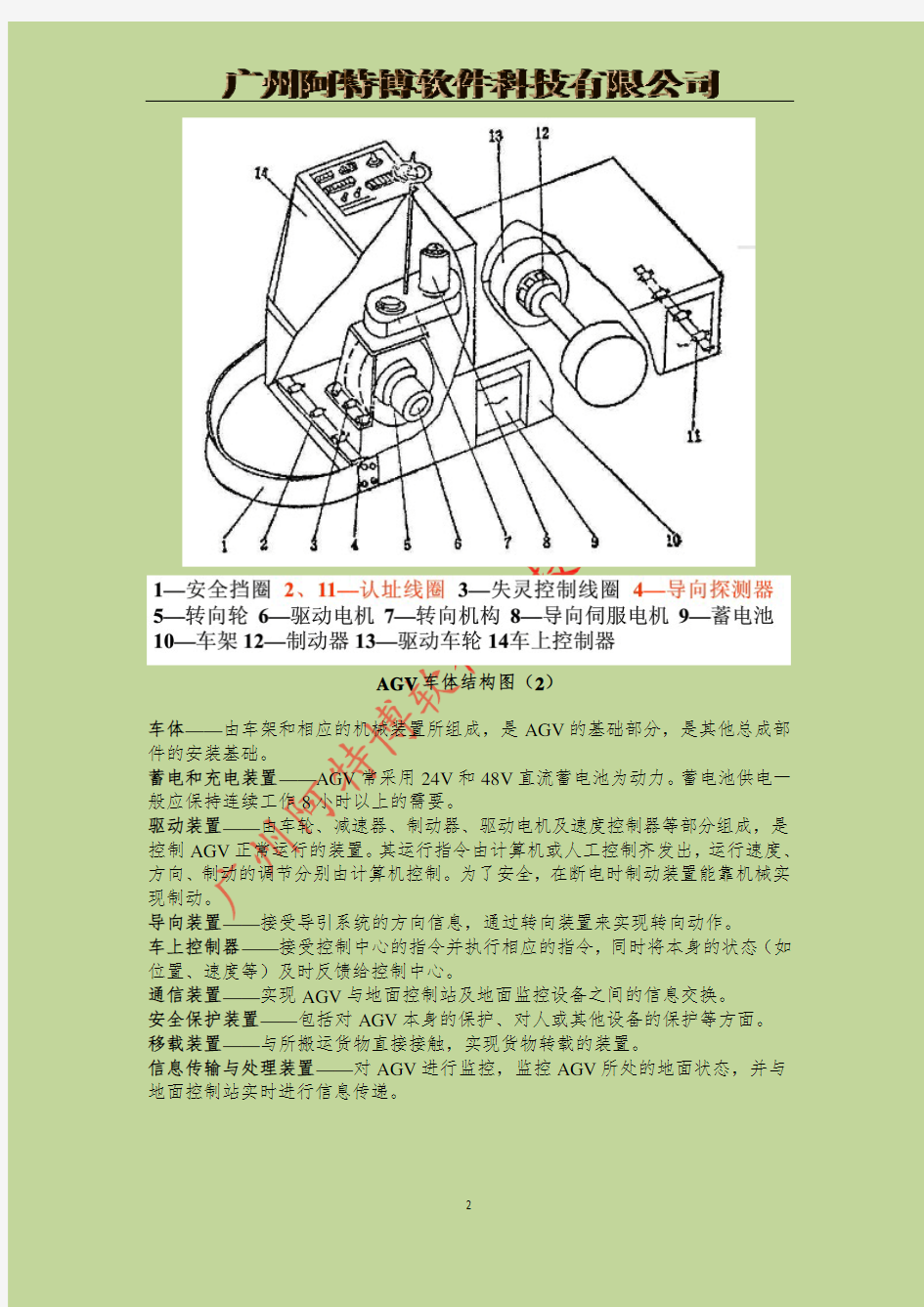
AGV车体结构图(2)
车体——由车架和相应的机械装置所组成,是AGV的基础部分,是其他总成部件的安装基础。
蓄电和充电装置——AGV常采用24V和48V直流蓄电池为动力。蓄电池供电一般应保持连续工作8小时以上的需要。
驱动装置——由车轮、减速器、制动器、驱动电机及速度控制器等部分组成,是控制AGV正常运行的装置。其运行指令由计算机或人工控制齐发出,运行速度、方向、制动的调节分别由计算机控制。为了安全,在断电时制动装置能靠机械实现制动。
导向装置——接受导引系统的方向信息,通过转向装置来实现转向动作。
车上控制器——接受控制中心的指令并执行相应的指令,同时将本身的状态(如位置、速度等)及时反馈给控制中心。
通信装置——实现AGV与地面控制站及地面监控设备之间的信息交换。
安全保护装置——包括对AGV本身的保护、对人或其他设备的保护等方面。移载装置——与所搬运货物直接接触,实现货物转载的装置。
信息传输与处理装置——对AGV进行监控,监控AGV所处的地面状态,并与地面控制站实时进行信息传递。
三AGV的发展历史、现状及趋势
1 AGV的发展历史与现状
1.1 AGV在国外的发展历史及现状
世界上第一台AGV是由美国Barrett电子公司于20世纪50年代初开发成功的,它是一种牵引式小车系统,可十分方便地与其他物流系统自动连接,显著地提高劳动生产率,极大地提高了装卸搬运的自动化程度。1954年英国最早研制了电磁感应导向的AGV,由于它的显著特点,迅速得到了应用和推广。
1960年欧洲就安装了各种形式、不同水平的AGVS 220套,使用了AGV 1300多台。到了70年代中期,由于微处理器及计算机技术的普及,伺服驱动技术的成熟促进了复杂控制器的改进,并设计出更为灵活的AGV。1973年,瑞典VOLVO 公司在KALMAR轿车厂的装配线上大量采用了AGV进行计算机控制装配作业,扩大了AGV的使用范围。70年代末,欧洲约装备了520个AGV系统,共有4800台小车,1985年发展到10000台左右。其应用领域分布为:汽车工业(57%),柔性制造系统FMS(8%)和柔性装配系统FAS(44%).
20世纪80年代末,国外的AGV达到发展的成熟阶段,此时美国的AGV生产厂商从1983年的23家剧增至1985年的74家。1984年,美国通用汽车公司完成了它的第一个柔性装配系统(FAS),从此该公司就成为当时AGV的最大用户。1986年已达1407台(包括牵引式小车、叉车和单兀装卸小车),1987年又新增加1662台。美国各公司在欧洲技术的基础上将AGV发展到更为先进的水平,他们采用更先进的计算机控制系统,运输量更大,移载时间更短,小车和控制器的可靠性更高。
日本在1963年首次引进AGV,其第一家AGV工厂于1966年由一家运输设备供应厂商与美国的Webb公司合资建成。1976年后,日本对AGV的发展给予了高度重视,每年增加数十套AGV系统,有神钢电机、平田电机、住友重机等27个主要生产厂商生产几十种不同类型的AGV。1981年,日本的AGV总产值为60亿日元,1985年已上升到200亿日元,平均每年以20%的速度递增,1986年,日本累计安装了2312个AGVS,拥有5032台AGV,到1990年日本拥有AGV约一万台。到1988年,日本AGV制造厂已达47家,如大福,Fanuc公司、Murata(村田)公司等,广泛应用于汽车制造、机械、电子、钢铁、化工、医药、印刷、仓储、运输业和商业上。
目前,全世界AGVS保有量在16000套以上,AGV在10万台以上。
1.2 AGV在国内的发展历史及现状
我国AGV发展历程较短,但一直以来不断加大在这一领域的投入,以改变我国AGV长期依赖进口的局面。经过不懈地努力终于取得了一定的成效,北京起重运输机械研究所、清华大学、中国邮政科学院邮政科学研究规划院、中国科学院沈阳自动化所、大连组合机床研究所、国防科技大学和华东工学院都在进行不同类型的AGV的研制并小批投入生产。
1976年,北京起重机械研究所研制出第一台AGV,建成第一套AGV滚珠加工演示系统,随后又研制出单向运行载重500公斤的AGV,双向运行载重500kg、1000kg、2000kg的AGV,开发研制了几套较简单的AGV应用系统。
1988年,原邮电部北京邮政科学技术研究所研制了邮政枢纽AGV。
1991年起,中科院沈阳自动化研究所/新松机器人自动化股份研究公司为沈
阳金杯汽车厂研制生产了客车6台AGV用于汽车装配线中,可以说是汽车工业中用得比较成功的例子,并于1996年获国家科学技术进步三等奖。
1992年,天津理工学院研制了核电站用光学导引AGV。
1995年,我国的AGV技术出口韩国,标志着我国自主研发的机器人技术第一次走向了国际市场。
目前国内的AGV保有量应该在1000台左右,大约有60%是国内的AGV厂家提供的,40%是国外厂家提供的。
在国内AGV的技术来源有两种模式:一种是引进技术;一种是自有知识产权的技术。两种模式目前都涵盖AGV的所有技术,技术水平并无多大差别。引进技术主要是瑞典NDC的AGV控制系统技术,据了解NDC目前在国内现有3家合作伙伴。
2 AGV的发展趋势分析
2.1 AGV的技术水平将日益提高
现代AGV技术的最显著特征是具有智能化。车载计算机的硬软件技术日益强大,使AGV具有从网络、无线或红外线信号接受装置接收调度中心或客户指令,自动导引,自动行驶,优化路线,自动作业,运行管理,车辆调度,安全避碰,自动充电,自动诊断等功能,实现了AGV的智能化、信息化、数字化、网络化、柔性化、敏捷化、节能化、绿色化。现代AGV是24小时不知疲倦的聪明车辆(仅在任务间隙时随机进行短时充电),能主动、自序、有节拍按最安全、快捷的路线执行作业。
2.2 AGV的动力性能将更趋强劲
AGV设计的难点之一是其动力源装置的设计。动力源的功率大小直接影响AGV的功用,而动力源的体积大小直接影响整车的体积及外观造型。
传统的AGV采用铅酸电池,能量密度小,体积大。随着电池技术的发展,今年来电池逐步由高能酸性电池发展到开始采用高能碱性电池,以提高环保性能,大幅提高充放电比,目前由充电时间/放电时间比为1:1提高到现在的1:12,大幅缩短了AGV的待机充电的时间。
动力电池性能及充放电技术的进步,使得现代AGV的动力性能普遍提高,运载能力与行驶特性进一步优化。
2.3 AGV的综合技术将逐步机器人化
AGV本身就是一种移动机器人,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。它集中了传感器技术、机械工程、电子工程、计算机工程、自动化控制工程以及人工只能等多学科的研究成果,代表机电一体化的最高成就,是目前科学技术发展最活跃的领域之一。
AGV的机器人化一直是AGV研究的热点技术。实际上,在机器人发展的整个过程中,其相关技术都先后在AGV中得到了应用。如智能移动机器人技术涉及到的机器人导航与定位,路径规划、运动控制等,均在AGV中得到了体现。使得现代AGV无论是专项技术还是综合性能,均得到了普遍提高,并仍将继续提高。
由于AGV的机器人化,现代AGV已不仅仅是一种沿固定路径行驶的搬运工具,几乎可以适合于各种固定的或不固定的运输场所。
2.4 AGV的应用将日益普遍
由于现代化生产观念日益受到重视,对生产线运行、物流系统的柔性要求越来越高。在产品换型、多种产品混合生产线运行、调整产量、重新组合生产线等方面,AGV必将得到迅速发展和普及应用,这不仅是现代化工业迅速发展的需要,更主要是由AGV本身所独具的优越性决定的。
2.5 国内外AGV的两种发展模式
第一种是以欧美国家为代表的全自动AGV技术,这类技术追求AGV的自动化,几乎完全不需要人工的干预,路径规划和生产流程复杂多变,能够运用在几乎所有的搬运场合。这些AGV功能完善,技术先进;同时为了能够采用模块化设计,降低设计成本,提高批量生产的标准,欧美的AGV放弃了对外观造型的追求,采用大部件组装的形式进行生产;系列产品的覆盖面广:各种驱动模式,各种导引方式,各种移载机构应有尽有,系列产品的载重量可从50kg到60000kg (60吨)。尽管如此,由于技术和功能的限制,此类AGV的销售价格仍然居高不下。此类产品在国内有为数不多的企业可以生产,技术水平与国际水平相当。
第二种是以日本为代表的简易型AGV技术--或只能称其为AGC (Automated Guided Cart),该技术追求的是简单实用,极力让用户在最短的时间内收回投资成本,这类AGV在日本和台湾企业应用十分广泛,从数量上看,日本生产的大多数AGV属于此类产品(AGC)。该类产品完全结合简单的生产应用场合(单一的路径,固定的流程),AGC只是用来进行搬运,并不刻意强调AGC的自动装卸功能,在导引方面,多数只采用简易的磁带导引方式。由于日本的基础工业发达,AGC生产企业能够为其配置上几乎简单得不能再简单的功能器件,使AGC的成本几乎降到了极限。这种AGC在日本80年代就得到了广泛应用,2002到2003年达到应用的顶峰。由于该产品技术门槛较低,目前国内已有多家企业可生产此类产品。
3 规划国内AGV系统的合理性策略
近年来,国内AGV系统的使用也成为物流方案中的一个亮点之一。但是通过对AGV分布行业的特点分析来看,第一,国内AGV实施的项目之中,有30%以上的部分多属于行业或者区域的形象样板工程,代表企业技术进步的示范性功能往往超过了其实际需求。第二,应用领域狭窄,基本局限于高利润行业。如烟草行业中的AGV数量约占市场统计台数的50%左右,紧随其后的是印钞等金融行业。而更应该发挥其优势的重型制造业,印刷造纸业,食品医药业以及无尘制造业等却难以见到AGV的身影。大福公司在中国的AGV业绩中也有近60%的系统是出现在烟草行业中。第三,多数规划系统的厂商设计集成能力不足。国内的物流界发展迅猛,但短时间的爆发性成长并没能掩饰住国内公司系统设计经验不足,集成分析能力不足的现状。而由此产生的设备单价恶性竞争,刻意强调单机性能的现象往往会使设计的初衷进入误区,事倍功半。加上部分客户追求最新、最先进和惟我独有的心态,两者的节拍运作常常会导致一个投资大,浪费大的系统出现,同时使许多人对AGV的作用也产生了怀疑。
物流系统的设计目标是以整体流程的效率化,简洁化为基础,以有效的解决方案促使客户实现利益最大化为目的。在此就AGV系统的合理性设计策略提出
几点建议。
(1) 从AGV的性能特点考虑系统构成。AGV具有前进、反向、转弯等走行功能,但由于其适合运用的场合多为跨区域设计,且人机交叉,所以走行速度基本控制在60m/min以下。以一个具有简单搬运路径的约有150m的工作环境来看,其搬运能力也只有15次/h左右,与有轨搬运小车STV(大福公司的产品可达到250m/min的速度)等相比,根本称不上高效率。尽管蓄电池的技术水平已有突破性的发展,比如大福公司的专利产品具有1:10的放电率,但是其智能充电方式和电池寿命又是降低效率,提高成本的一大要素。因此相邻生产工艺间的搬运形式并不是AGV的优势。
(2) 从AGV的性价比考虑系统。在汽车、钢铁制造业,印刷造纸业等行业,产品多属于超大超重类型,物流量并不大而且物料保管区域及加工区域有一定的距离。在既不影响人流走向及其他物流动线,又能简便安全地搬运物料的前提下,相比投入大吨位特殊叉车和必须对应的操作人员来讲,AGV的使用会成为一个高性价比的解决方案。同样在食品、制药包括烟草行业,将大量分散的制造设备有机地结合起来,而且对应于设备布置变化的灵活性也是AGV发挥其优势的一个领域。在液晶生产等电子洁净化环境,危险作业环境等特殊需要行业,AGV 更是最适合的搬运手段。目前国内的AGV应用仅限于少数有经济实力的行业,但这只是发展变化中的一个中间点,当上述相关行业的产业规模和物流整合到达一定的水平之后,AGV的应用范围和形式会进一步拓宽扩大。
四AGV的特点
1 自动化程度高——由计算机,电控设备,磁气感应SENSOR,激光反射板等控制。当车间某一环节需要辅料时,由工作人员向计算机终端输入相关信息,计算机终端再将信息发送到中央控制室,由专业的技术人员向计算机发出指令,在电控设备的合作下,这一指令最终被AGV接受并执行——将辅料送至相应地点。
2 充电自动化——当AGV小车的电量即将耗尽时,它会向系统发出请求指令,请求充电(一般技术人员会事先设置好一个值),在系统允许后自动到充电的地方“排队”充电。另外,AGV小车的电池寿命很长(2年以上),并且每充电15分钟可工作4h左右。
3 美观——提高观赏度,从而提高企业的形象。
4 安全性——人为驾驶的车辆,其行驶路径无法确知。而AGV 的导引路径却是非常明确的,因此大大提高了安全性;
5 成本控制——AGV 系统的资金投入是短期的,而员工的工资是长期的,还会随着通货膨胀而不断增加;
6 易维护——红外传感器和机械防撞可确保AGV免遭碰撞,降低故障率;
7 可预测性——AGV 在行驶路径上遇到障碍物会自动停车,而人为驾驶的车辆因人的思想因素可能会判断有偏差;
8 降低产品损伤——可减少由于人工的不规范操作而造成的货物损坏;
9 改善物流管理——由于AGV 系统内在的智能控制,能够让货物摆放更加有序,车间更加整洁;
10 较小的场地要求——AGV 比传统的叉车需要的巷道宽度窄得多。同时,对于自由行驶的AGV 而言,还能够从传送带和其他移动设备上准确地装卸货物;
11 灵活性——AGV 系统允许最大限度地更改路径规划;
12 调度能力——由于AGV 系统的可靠性,使得AGV 系统具有非常优化的调度能力;
13 工艺流程——AGV 系统应该也必须是工艺流程中的一部分,它是把众多工艺连接在一起的纽带;
14 长距离运输——AGV 系统能够有效地进行点对点运输,尤其适用于长距离运输(大于60米);
15 特殊工作环境——专用系统可在人员不便进入的环境下工作。
五AGV的类型
1 按导引方式分
1.1 直接坐标导航方式
用定位块将AGV的行驶区域分成若干坐标小区域,通过对小区域的计数实现导航,一般有光电式(将坐标小区域以两种颜色划分,通过光电器件计数)和电磁式(将坐标小区域以金属块或磁块划分,通过电磁感应器件计数)两种形式,其优点是可以实现路径的修改,导引的可靠性好,对环境无特别要求。缺点是地面测量安装复杂,工作量大,导引精度和定位精度较低,且无法满足复杂路径的要求。
1.2电磁导航方式
电磁导航是较为传统的导航方式之一,目前仍被采用,它是在AGV的行驶路径上埋设金属线,并在金属线加载导引频率,通过对导引频率的识别来实现AGV的导航。其主要优点是引线隐蔽,不易污染和破损,导引原理简单而可靠,便于控制和通讯,对声光无干扰,制造成本较低。缺点是路径难以更改扩展,对复杂路径的局限性大。
电磁导航原理图
1.3 磁导航方式
与电磁导引相比,用在路面上贴磁条替代在地面下埋设金属线,通过磁感应信号实现导航,其灵活性比较好,改变或扩充路径较容易,磁条铺设简单易行,但此导航方式会受环路通过的金属等硬物的机械损伤,对导航有一定的影响。
磁导航原理图
1.4 激光导航方式
激光导航是在AGV行驶路径的周围安装位置精确的激光反射板,AGV通过发射激光束,同时采集由反射板反射的激光束,来确定其当前的位置和方向,并通过连续的三角几何运算来实现AGV的导航。
此项技术最大的优点是,AGV定位精确;地面无需其他定位设施;行驶路径可灵活多变,能够适合多种现场环境,它是目前国外许多AGV生产厂家优先采用的先进导航方式,缺点是制造成本高,对环境要求较相对苛刻(外界光线,地面要求,能见度要求等)。
激光导航原理图
1.5 光学导航方式
在AGV的行驶路径上涂漆或粘贴色带,通过对摄像机采入的色带图象信号进行简单处理而实现导航,其灵活性比较好,地面路线设置简单易行,但对色带的污染和机械磨损十分敏感,对环境要求过高,导航可靠性较差,且很难实现精确定位。
光学导航原理图
1.6 惯性导航方式
惯性导航是在AGV上安装陀螺仪,在行驶区域的地面上安装定位块,AGV 可通过对陀螺仪偏差信号的计算及地面定位块信号的采集来确定自身的位置和方向,从而实现导航。
此项技术在军方较早运用,其主要优点是技术先进,定位准确性高,灵活性强,便于组合和兼容,适用领域广,已被国外的许多AGV生产厂家采用。其缺点是制造成本较高,导引的精度和可靠性与陀螺仪的制造精度及使用寿命密切相关。
惯性导航原理图
1.7 图象识别导航方式
对AGV行驶区域的环境进行图象识别,实现智能行驶,这是一种具有巨大潜力的导航技术,此项技术已被少数国家的军方采用,将其应用到AGV上还只停留在研究中。
图象识别技术与激光导航技术相结合将会为自动化工程提供意想不到的可能,如导航的精确性和可靠性,行驶的安全性,智能化的记忆识别等都将更加完美。
1.8 GPS(全球定位系统)导航方式
通过卫星对非固定路面系统中的控制对象进行跟踪和制导,目前此项技术还在发展和完善,通常用于室外远距离的跟踪和制导,其精度取决于卫星在空中的固定精度和数量,以及控制对象周围环境等因素。由此发展出来的是iGPS(室内GPS)和dGPS(用于室外的差分GPS),其精度要远远高于民用GPS,但地面设施的制造成本是一般用户无法接受的。
2 按驱动方式分
2.1 单驱动
用于三轮车型:一个驱动兼转向轮,两个固定从动轮(分布在车体轴线的两边)。这种车型可以前进、后退、左右转弯(转角小于90°)。因三轮结构的抓地性好,对地表面要求一般,适用于广泛的环境和场合。
单驱动原理图
舵轮结构示意图
2.2差速驱动
常见有三轮和四轮两种车型:两个固定驱动轮(分布在车体轴线的两边),一个(三轮车型)或两个(四轮车型)从动自由轮,转弯靠两个驱动轮之间的速度差实现。这种车型可以前进、后退、左右转弯(转角大于90°)、原地自旋,转弯的适应性比单驱动强。若是三轮车型,对地表面的适用性和单驱动类似。若是四轮车型,因容易造成其中某一个轮悬空而影响导航,故对地表面平整度要求苛刻,适用范围受到一定限制。
差速驱动示意图
差速驱动原理图
2.3 双驱动
用于四轮车型:两个驱动兼转向轮,两个从动自由轮。这种车型可以前进、后退、全方位(万向)行驶。突出特点是可以在行驶过程中控制车身姿态的任意变化,适用于狭窄通道或对作业方向有特别要求的环境和场合。缺点和差速驱动的四轮车型类似,对地表面平整度要求苛刻,适用范围受到一定限制;此外,结构复杂,成本较高。
双驱动示意
2.4 多轮驱动
用于八轮车型:四个驱动兼转向轮,四个从动自由轮。这种车型可以前进、后退、全方位行驶。应用于重载行业输送,结构复杂,成本较高。
多轮驱动示意图
3 按移载方式分
3.1 推挽式
AGV装卸货物通过自身的推挽机构与地面的无动力辊道站台实现。作业时,AGV停靠在站台侧边,通过推挽机构左、右侧向移动伸臂推拉完成装卸货物,货物在AGV辊道与地面站台辊道之间滚动,载荷转移巧妙,地面站台不需要连锁信号和动力传动,适合同高度站台之间的搬运场合。但对作业点的定位精度以及与移载系统关联的部分要求较高,特别对多辆车和多个站台的场合,要保证其可靠性难度较大。
推挽式常用于平面托盘的物料搬运,如果是欧式托盘或其它物体,要注意满足能滚动和可推挽的条件。
3.2 辊道式
AGV装卸货物是通过自身辊道与地面站台辊道对接之后实现。地面站台是带动力传动的辊道,AGV准确停靠在地面站台侧边,车上和站台上的辊道对接无误后同步传动完成移载。故要求滚动体规范,传动高度一致,传动速度吻合。可左、右双向装卸托盘货物,作业效率高,AGV安全性好。移载机构与原理简单,可靠性好,但站台需要有连锁信号和动力传动。适合于站台数少,车间或库区入、出口RS/AS之间往返作业。辊道式常用于可滚动的各式托盘或物体的移载场合,包入括大的纸箱、木箱、板材、集装箱等,特别适用于重载物料的搬运。
辊道式AGV
3.3 链式
除了货物传动方式是链条或链板不同外,其余与辊道式类似。链式主要适用于不能滚动物体的移载场合。
链式AGV
3.4 带式
除了货物传动方式是传送带不同外,其余与辊道式类似。带式主要适用于较轻较小物料的移载场合,如纸盒、纸箱、各式袋装品等。
带式AGV
3.5 牵引式
AGV作为牵引动力,通过拖挂带轮的箱体或容器完成对物料的运送。适合用挂斗和拖车运送物料的场合,如行包运送、化学品运送、废料收集等。
牵引式AGV
3.6 驮举式
AGV通过驮举来移载物料,一般移载机构位于AGV车体上方,作业时AGV 停在货物正下方,通过升降机构驮起或降下实现货物的移载,动作简单,作业效率高,安全性好。适合多种货物形式和笨重物体两地之间往返搬运,也可作为柔性装配线、加工线使用。常用于车身、车架、集装箱、大型机件等物体搬运。
驮举式AGV
3.7 叉式
叉式AGV与人工叉车在式样上基本类似,有侧叉式、正向叉式、落地叉式、三向叉式等多种车型。叉式AGV基本采用托盘堆放货物进行作业,目前正随着物流产业标准托盘的逐步推广而迅速发展。
3.7.1 侧叉式:从车的左右两侧移载货物,因叉起过程重心需由车体来平衡,故车体较笨重,移载重量有限,且能耗高、不经济。
侧叉式AGV
3.7.2正向叉式:从车体正前方叉起货物,能适应多种托盘从地面到常规高度范围货架的作业场合。特点是货叉下方没有支腿,叉车体作业时完全在货架或站台之外,对环境无特别的条件要求。但由于平衡的需要,车体较笨重,货叉突出,安全性有限。
3.7.3 落地叉式:货叉在车体后方,能上下升降,落下时在两条支腿之上,叉间距与标准欧式托盘下的两个空档吻合,正好能进入其中叉起托盘货物。因此,移载过程须倒车才能完成,对于双面托盘,不能直接放到地面,须放在有一定高度(一般≥100mm),能保证货叉及下方的两个支腿同时进入即可。该车型适合在高低差较大的站台或货架(牛腿式)之间装卸货物,特别是对驶入式巷道、多层货架(牛腿式)的密集性存储搬运独具优势。缺点是货叉下方有支腿,倒车过程安全性有局限。常用于各种库区到车间的物料自动存储及搬运,如辅料、原料、成品等的自动化物流系统。
落地叉式AGV
3.7.4 三向叉式:这种AGV的货叉能分别向左、向右、向正前方三个方向进行托盘货物的自动装卸。适应多种标准托盘,适合巷道内多层货架或高低差较大的存储装卸场合。缺点是车型笨重宽大,行驶区域占用较多空间,作业场地有效利用率低,且AGV结构复杂,成本很高。
3.8 拣选式
是在传统人工拣选车的基础上改造成的自动导引拣选车。作业时,人只要站在AGV拣选台上,当接到拣选指令后,AGV会按照最优的次序自动行驶,逐一地准确停位在目标位置,升降拣选台到适合人拣选的高度,人就可以按照车载终端的信息提示,进行拣选,然后确认该项完成,接着AGV会前往下一目标点,继续下一项拣选,依次进行。常用于低层平库中巷道货架的多品种小件货物场合,如药品、图书、档案、备件等的拣选。
3.9 龙门式
AGV外形类似龙门结构,能全方位行驶,移载过程是通过左右侧向伸缩移动货叉和升降来完成装卸货物。作业灵活性强,行驶安全性好。对地面站台要求简单,但自身移载机构复杂,适合狭窄区域或苛刻路径。多用于生产车间,如食品加工的原料运送。
3.10机器人式
AGV上装备机械手,可根据指令自动行驶,准确停位,自动完成抓举、装配、装卸、堆码、拆垛等一系列作业功能,是一个智能移动式工业机器人。但结构、控制复杂,成本较高。常用于条件特殊、要求高,或某些无人的场合,如辅料自动搭配、危险品自动抓取等。
机器人式AGV
4 按充电方式分
4.1 自动充电
当AGV需要补充电力时,会自动报告并请求充电,由地面控制中心指挥,
驶向指定充电区或台位,车载充电连接器与地面充电系统自动连接并实施充电。充电完成后AGV自动脱离充电系统,驶向工作区或待命区投入正常运行。其特点是整个充电过程全部实现自动化、智能化,无需专人看管。自动充电AGV适用于工作周期长,车多人少,自动化程度高的场合,且多使用碱性快速充电电池,如卷烟、冶金、化工、汽车、航空等行业。
4.2 手动充电
当AGV电力不足时,由地面控制中心指挥,驶向指定充电区或台位,由专职人员手动完成AGV与充电器之间的电器连接,然后实施充电,完成后也是人工去脱离连接电路,恢复工作状态。手动充电AGV的特点是安全可靠,简单易行,但需要专人看管,浪费人力,而且自动化程度降低。常用于自动化程度要求不是很高,车少人多,标准工作制的场合,如白天上班8小时使用AGV,下班休息时让AGV充电,适用于酸性常规电池。
4.3换电池充电
当AGV电力不足时,由专职人员手动更换电池组,AGV即可投入使用。换下的电池组通过充电后待用。其特点是简单快捷,但要专人看管,需多一倍的电池组,浪费人力财力,方式原始。常用于对工作响应的及时性要求较高、车不足的场合。
5 按通讯方式分
5.1 有线通讯
可利用导引线实现载波通讯,布线隐蔽,不易污损。主要用于电磁导引、简单路径和区域不大的场合。
5.2 红外光通讯
没有频率许可问题,通讯速度高,容易控制,通讯区须在清晰可见范围,需要机械防护,对灰尘敏感,受其它光源及相同波长红外线的干扰。适用于简单路径、没有遮挡和区域不大的场合。多用于电磁导引、磁带导引、光学导引AGV。
5.3 无线电通讯
良好的空间覆盖范围,对一般的遮挡干扰不敏感;安装简单,容易保护;室外效果更好。缺点是使用频率须许可,同一个系统内的所有AGV和地面基站须统一用一种频率,易受其它无线电设备干扰。适用于各种路径、各种导引方式、环境较复杂、区域较大的场合。
5.4 无线局域网
除了具有无线电通讯的基本特性外,还具有网络通讯的各项特点,速度快、扩展方便、兼容性好、与其它系统连接便捷、成本低。适用于各种路径、各种导引方式、环境较复杂、区域较大的场合。
六AGV的主要技术参数
1 额定载重量
自动导引搬运车所能承载货物的最大重量。AGV的载重量范围在50kg~20000kg,以中小型吨位居多。根据日本通产省的调查,目前使用的AGV载重量在100kg以下的占19%,载重量在100kg~300kg 22% 300kg 500kg 9% 500kg 1000kg 300kg占22%,300kg~500kg占9%,500kg~1000kg的占18%,18% 1000kg~2000kg的占21%,2000kg~5000kg的占8%,而5000kg 以上的数量极少。
2 自重
自重是指自动导引搬运车与电池加起来的总重量。
3 车体尺寸
车体尺寸是指车体的长、宽、高外形尺寸。该尺寸应该与所承载货物的尺寸和通道宽度相适应。
4 停位精度
指AGV到达目的地址处并准备自动移载时所处的实际位置与程序设定的位置之间的偏差值(mm)。这一参数很重要,是确定移载方式的主要依据,不同的移载方式要求不同的停位精度。
5 最小转弯半径
指AGV在空载低速行驶、偏转程度最大时,瞬时转向中心到AGV纵向中心线的距离。它是确定车辆弯道运行所需空间的重要参数。
6 运行速度
指自动导引搬运车在额定载重量下行驶时所能达到的最大速度。它是确定车辆作业周期和搬运效率的重要参数。
7 工作周期
自动导引搬运车完成一次工作循环所需的时间。
8 运载类别
所运输的物料的类型
9 移载方式
移载装置的运动形式
10 驱动形式
指的是AGV靠什么装置来实现行走,转向的功能的
七AGV系统
1 AGV系统简介
AGV系统的控制是通过物流上位调度系统、AGV地面控制系统及AGV 车载控制系统三者之间的相互协作完成的,对该系统的理解,有一个非常恰当而通俗易懂的例子:
假设某市有一家出租车公司,该公司管理先进,每辆出租车都装全球定位系统(GPS),这样在公司的监控中心就可以清楚地知道每辆车的位置及行驶路线,司机可通过无线通信随时向公司汇报此时车辆的载客情况。
当有客户需要乘坐出租车时,客户可以打电话到出租车公司的客户中
心,说明他当前所在的位置,以及要到达的目的地,这里,我们可将客户的电话理解为来自物流调度系统的需求,出租车公司的客户中心理解为AGV的地面控制系统,即AGV系统的上位。
客户中心收到客户的电话后,可以通过无线电话与出租车司机联系,选择离客户最近,又正好空闲的车辆A前往接客,就像AGV的地面控制系统进行的车辆和任务分配;在车辆A前往接客的途中,客户中心可能又接到报告,有空闲车辆B离客户更近,那么客户中心将及时通知车辆B去接客户,取消车辆A的任务,这就是AGV地面控制系统的动态车辆调度。客户中心对出租车将要行驶道路的交通状况也了如指掌,能够及时通知各个司机选择最便捷的道路行驶,该道路所需时间最短,但不一定是路程最短,因为,最近路程的道路上可能发生了交通阻塞,这就是AGV地面系统中所完成的路径搜索和路径分配的工作。
AGV系统的控制过程就类似这样一家管理先进的出租车公司,物流上位调度系统、AGV地面控制系统和AGV车载控制系统分别相当于客户、客户中心和出租车司机,AGV地面控制系统和各台AGV之间通过无线通信来交换信息,调度AGV的作业,并为其选择路径(线),确保交通通畅。AGV是以电池为动力的,当电量不足时,会向地面控制系统发出充电请求,在得到允许后,前往充电站自动充电,在充电期间,AGV地面控制系统不会向此AGV分配任何任务,就与出租车进了加油站不再载客一样。
2 AGV系统的组成及各部分的作用
曾有国外专家对AGV控制系统需解决的主要问题做了恰当的比喻:Where am I? (我在哪里?)Where am I going?(我要去哪里?)How can I get there?(我怎么去?),这三个问题归纳起来分别就是AGV控制系统中的三个主要技术:AGV的导航(Navigation),AGV的路径规划(Layout designing),AGV的导引控制(Guidance)。为了能够解决好这些问题,AGV系统的构成也必然复杂:
AGV系统的硬件结构
AGV控制系统分为地面(上位)控制系统、车载(单机)控制系统及导航/导引系统,其中,地面控制系统指AGV系统的固定设备,主要负责任务分配,车辆调度,路径(线)管理,交通管理,自动充电等功能;车载控制系统在收到上位系统的指令后,负责AGV的导航计算,导引实现,车辆行走,装卸操作等功能;导航/导引系统为AGV单机提供系统绝对或相对位置及航向。
AGV系统是一套复杂的控制系统,加之不同项目对系统的要求不同,更增加了系统的复杂性,因此,系统在软件配置上设计了一套支持AGV项目从路径规划、流程设计、系统仿真(Simulation)到项目实施全过程的解决方案。上位系统提供了可灵活定义AGV系统流程的工具,可根据用户的实际需求来规划或修改路径或系统流程;而下位系统也提供了可供用户定义不同AGV功能的编程语言。
AGV系统的软件结构
2.1 地面控制系统
AGV地面控制系统(Stationary System)即AGV上位控制系统,是AGV 系统的核心。其主要功能是对AGV系统(AGVS)中的多台AGV单机进行任务分配,车辆管理,交通管理,通讯管理等。
2.1.1 任务管理
任务管理类似计算机操作系统的进程管理,它提供对AGV地面控制程序的解释执行环境;提供根据任务优先级和启动时间的调度运行;提供对任务的各种操作如启动、停止、取消等。
2.1.2 车辆管理
车辆管理是AGV管理的核心模块,它根据物料搬运任务的请求,分配调度AGV执行任务,根据AGV行走时间最短原则,计算AGV的最短行走路径,并控制指挥AGV的行走过程,及时下达装卸货和充电命令。
2.1.3 交通管理
电力系统可靠性综述
P 本文简要介绍了电力系统中各子系统可靠性的基本概念以及相应的可靠性指标、可靠性指 标计算方法等。对文献中提出的相应的子系统可靠性评估方法进行评述,分析了它们在电力系统 可靠性分析中应用的特点以及存在的主要问题,以促进该研究领域的进一步发展。 电力系统可靠性综述 ■广东工业大学自动化学院鄂飞程汉湘 产 经 电力系统可靠性[1]是指电力系统按可接 受的质量标准和所需数量不间断地向电力 用户供应电力和电能量的能力的量度,包 括充裕度和安全性两个方面。充裕度是指 电力系统维持连续供给用户总的电力需求 和总的电能量的能力,同时考虑到系统元 件的计划停运及合理的期望非计划停运, 又称为静态可靠性,即在静态条件下电力 系统满足用户电力和电能量的能力;安全 性是指电力系统承受突然发生的扰动,如 突然短路或未预料到的失去系统元件的能 力,也称为动态可靠性,即在动态条件下 电力系统经受住突然扰动且不间断地向用 户提供电力和电能量的能力。 电力系统可靠性是通过定量的可靠性 指标来量度的。一般可以是故障对电力用 户造成的不良后果的概率、频率、持续时 百分数备用法和偶然故障备用法。这两种 方法均缺乏应有的科学分析,目前已逐渐 被概率性可靠性指标所代替。 概率法常用的可靠性指标有:电力不 足概率(LOLP)、频率及持续时间(F&D)、 电量不足概率(L O E P )、电力不足期望 (LOLE)。国际上曾一度采用LOL(loss of load probability)作为发电系统可靠性 指标,但该方法过于粗略,评估误差较大, 且无法计算有关电量指标。后来人们又提 出了更为详细的计算电力不足概率的指标 和方法,即电力不足小时期望值LOLH(h/ a)。该方法以每天24h的实际负荷变化情 况为负荷曲线模型,计算出电力不足小时 期望值。 国际上关于发电系统可靠性计算的另 一个常用的指标为电量不足期望值EENS [2] 间、故障引起的期望电力损失及期望电能 (expected energy not supplied), 量损失等,不同的子系统可以有不同的可 靠性指标。 电力系统规模很大,习惯上将电力系 统分成若干子系统,根据这些子系统的功 能特点分别评估各子系统的可靠性。 发电系统可靠性 发电系统可靠性是指统一并网的全部 发电机组按可接受标准及期望数量满足电 力系统的电力和电能量需求的能力的量度。 发电系统可靠性指标可以分为确定性 和概率性两类。过去曾广泛应用确定性可 靠性指标来指导电力系统规划和运行,如 其意义为在某一研究周期内由于供电不足 造成用户减少用电量的期望值。该指标能 同时反映停电的概率与停电的严重程度, 而且更便于把可靠性与经济性挂钩,因此 EENS指标日益受到重视。文献[3]针对我国 电力系统的特点,以LOLH 和EENS作为可靠性指标, 计算了全国统一的指标参 数,并绘出了综合最优发 电系统可靠性指标曲线, 对我国的电源规划及发电 系统可靠性研究有重要的 参考价值。其他可靠性指 标虽有应用,但不普遍。 2006 年第 3 期 5
舰船电力推进技术的发展现状
舰船电力推进技术的发展现状 电力推进是指由舰船的原动机(柴油机或燃气轮机或两者混合,甚至核动力装置)驱动发电机产生电能,再由电动机将电能转换为机械能驱动推进器实现舰船机动的一种推进方式。一艘电力推进船舶,不管采用何种方式发电,电力不是像传统布置一样直接与驱动装置相连,但可为全船提供电力,这种方式能提供更大的供电灵活性、高效性和生存性。舰船步入全电力时代就像当初从帆船时代步入蒸汽时代一样,是一个巨大的跨越。 一电力推进的优缺点 1 电力推进的优点 1)可以灵活布置船上大型机械设备; 2)便于操控和航行; 3)可降低运行噪声。因为没有齿轮箱等大功率后传动机械装置和长轴系,明显降低了舰艇运行噪声,提高了乘员的舒适度,且提高了舰船的隐身性; 4)如果电动机设计成低速(100~200 r/min)运行,并直接与推进轴连接,则可省去减速齿轮;
5)与常规的机械推进比较,电力推进的重量和体积大大减少; 6)电力推进系统能效更高; 7)电力由冗余电缆传输,可靠性高,并可减少维护; 8)节能环保。所有原动机均以恒定速度运行于最佳工作状态,并可根据负载变化动态调整,明显降低能耗和排放; 9)全电力舰船所需的舰员人数会大幅减少,进一步减少使用成本。10)可使舰船成为电磁武器的搭载平台。大型舰船变频调速电力推进在功率等级上与电磁武器基本相当,随着这种新型电力推进技术的工程化应用,将在电能管理和脉冲式电源变换等重大技术上为大功率雷达、电磁炮、电磁弹射等新装备装舰扫清障碍。 2 电力推进系统相对常规推进装置的不足之处 1)电力推进系统的价格较传统推进装置更为昂贵,因而船舶建造的初投资将会增加; 2)在原动机与螺旋桨之间增加的电器设备,如发电机、变压器、变频器和电动机等,加大了船舶全动力运行时的传输损耗; 3)大量采用电气设备可能引起一些危害,如火灾和电网的谐波干扰等;4)由于船舶安装了多种新型设备,需要制定不同的运行、人员配备及维护策略,提高了对操作人员和维护人员的要求。
电力系统概述
第一章电力系统概述 第一节本厂在系统中的地位和作用 一、华中电网现状 2002年底华中地区装机容量为52142MW。其中水电装机17985MW,火电装机34157MW。分别占全部装机的34.5%、65.5%。统调装机容量39140MW,其中水电12294MW,火电26845MW。 2002年华中地区发电量221.9TW·h。其中水电发电量64.2TW·h,火电发电量157.7TW·h,分别占全部发电量的28.9%、71.1%。统调发电量168.1TW h,其中水电发电量45.3TW h,火电发电量122.8TW·h。 2002年华中地区全社会用电量为220.3TW·h。统调用电最高负荷30790MW,比上年增长14.72%。 二、湖南省电力系统现状 1.电源现状 2002年底湖南省装机容量为11110.86MW。其中水电装机6135.28MW,火电装机4975.58MW。分别占全省装机的55.2%、44.8%。2002年统调装机容量为7424.65MW,其中水电装机3419.65MW、火电装机4005MW。 2002年湖南省发电量45.387TW·h。其中水电发电量25.329TW·h、火电发电量20.05785TW·h,分别占全省发电量的55.8%、44.2%。 湖南省电网电源主要分布在湖南西部,全省最大火力发电厂为华能岳阳电厂(725MW)。最大水电站为五强溪水电站(1200MW)。 2.网络现状 湖南省电力系统是华中电力系统的重要组成部分,处于华中系统的南部,目前全网分为14个供电区。 湖南电网经两条联络线即葛洲坝~岗市500kV线路及汪庄余~峡山220kV线路与华中电网联系,贵州凯里电厂通过凯里~玉屏~阳塘220kV线路向湖南送电。目前省内已建成五强溪~岗市~复兴~沙坪~云田~民丰~五强溪500kV环网,并且岗市与云田间另有一回500kV线路直接相联。 2002年底湖南省共有500kV变电所5座,变电容量4,250MV A(云田(株洲)2,750MV A,民丰(娄底)1,750MV A,岗市(常德)1,500MV A,复兴(益阳)1,750MV A,沙坪(长沙)1,750MV A)220kV公用变电所54座,变电容量10,590MV A,拥有500kV线路8条894.3km ,220kV线路136条6666km。 2002年底湖南电网共装有无功补偿设备7630.7Mvar,其中电容器6180.2Mvar,并联电抗器1280.1Mvar,调相机50.4Mvar,其他165Mvar。 3.供用电现状
电气工程及其自动化毕设之文献综述电子教案
文献综述 学院名称电气工程学院指导教师 职称教授 班级 学号 学生姓名
2016年1月12日
电网规划设计文献综述 摘要:电能是现代社会中最重要、也是最方便的能源。电力系统是由电能的生产、输送、分配和消费的歌环节组成的整体,它与其他工业系统相比,具有很多的特点。电力系统运行要求保证安全可靠地供电、保证良好的电能质量和保证电力系统运行的经济性。科学合理的电力规划设计是电力系统安全、可靠、经济运行的前提,对获取最大的经济效益和社会效益均具有十分重要的意义。在电网规划设计中有涉及到电网电压等级的选择、线路导线的选择、变压器容量和型号的选择、电力系统运行接线方式的选择、电力系统潮流计算等方面。 关键词:电力系统;接线方式;电网规划
在高速发展的现代社会中,电力工业是国民经济的基础,在国民经济中的作用已为人所共知:它不仅全面地影响国民经济其它部门的发展,同时也极大地影响人民的物质和文化生活水平的提高,影响整个社会的进步。改革开放以来,电力工业取得了突飞猛进、举世瞩目的辉煌成就,从1996年起,我国发电机装机容量和年发电均居世界第二位,超过了俄罗斯和日本,仅次于美国,进入世界电力生产和消耗大国行列。发电厂规模和单机容量的大幅度提高,标志着我国的电力工业已经进入一个飞速发展的新时期。 电能是现代社会中最重要、也是最方便的能源。电力系统是由电能的生产、输送、分配和消费的歌环节组成的整体,它与其他工业系统相比,具有很多的特点: 1.电能的生产和消费具有同时性 由于电能的生产和消费是一种能力形态的转换,要求生产与消费同时完成,因此电能难于储存。从这个特点出发,在电力系统运行时就要求发电厂在任何时刻发出的功率,必须等于该时刻用电设备所需的功率、输送和分配环节中的功率损耗之和。 2.电能与国名经济各部门和人民日常生活关系密切 由于电能可以方便地转化为其他形式的能,且易于远距离传送和自动控制,因此得到广泛的应用。供电的突然中断会产生严重的后果。 3.电力系统的过度过程非常短暂
舰船电力系统的发展现状及发展趋势
舰船电力系统的发展现状及发展趋势 摘要 随着国家海洋战略的逐步展开,舰船的大型化,全电力推进发展的同时,舰船电力系统的地位也从辅助系统变成主动力系统。对电力系统的稳定新,可靠性,智能化等提出了更高的要求。为了适应这种发展趋势,一些新技术新思路随之出现。本文详细论述了智能电网在舰船电力系统中应用发展,云计算的舰船电力资源调度系统等领先技术。 关键字:智能电网云计算 0引言 进入21世纪以来,智能化和数据处理技术的优越性引起了各行业的广泛关注,随着国家海洋战略的不断推进,计算机技术被不断的运用到舰船系统的各个方面,尤其在舰船电力系统的在作用越来越重要的情况下,计算机技术对提高舰船电力系统优越性发挥了巨大的作用。1智能电网在舰船电力系统中应用发展 1.1舰船电力系统智能电网 智能电网的概念涵盖了电网的发,输、变、配、用电等各个环节,智能电网正在给全球电力行业带来新的机遇与挑战,是2l 世纪重大科技创新和变革趋势,国内外研究学者纷纷开始关注智能电网的研究和建设,以实现传统电网的升级换代及电网运行控制新思路的改革。随着舰船电力系统规模日益扩大和综合电力系统概念的提出,电力系统配置、网络结构、运行模式和控制策略等方面较传统舰船电力系统都发生了较大的改变,对供电质量、可靠性和生命力提出了更高的指标。从舰船总体角度来说,舰船智能电网是舰船综合电力系统的一个重要组成部分,舰船综合电力系统还包括舰船动力推进、高能武器发射等部分。随着技术的发展,未来舰船综合电力系统在大中型舰艇上将获得绝对的优势地位,带来舰船性能的全面提高。全电力化舰船采用综合电力系统结构形式,更加可靠、高效和灵活,并有较强的战斗力和生命力。可见,舰船电网智能化是实现舰船综合电力系统的需要和发展趋势。 1.2舰船智能电网特征 舰船智能电网的发展目标是利用现代信息技术,通信技术、计算机技术、测量技术、自动化技术等先进技术,抵御各种事故损害,提高舰船电力系统在发电侧、输变配电侧、用电侧的能源转换和传输效率,确保电网运行更安全、更可靠、更灵活、更经济,电网与负载之间能进行实施的交互信息。基于舰船电力系统的独有的特点、发展需求和目标,舰船智能电网特征主要表现为以下几个方面: 1)自愈性。自愈是电网智能化的重要标志。实时掌握电网运行状态,预测电网运行趋势,故障发生时,在没有人工干预下,能够快速隔离故障、自我恢复,避免断电事故的发生。 2)互动性。实现与负载用户的智能互动,按需供给和调节,实现资源的优化配置和集约管理,提供最佳的电能质量和供电可靠性。 3)抵御攻击。舰船独特的任务使命要求舰船电网必须具有“抗攻击”的能力。 1.3 舰船智能电网发展的关键技术 发展舰船智能电网必须结合舰船综合电力系统的发展需求,融合信息、通信、传感和量测、智能设备、自动控制和决策支持等关键技术,以标准化接入为基础,以信息共享、智能决策和综合调控为主要手段,具有多指标自趋优运营能力,适应未来舰船综合电力系统发展的需要,提高电网运行效率,提高能源利用效率,提高供电的安全性和可靠性,减少电网损耗,降低电力设备运行噪声,实现与负载用户间的互动。 2云计算的舰船电力资源调度系统研究 2.1舰船电力系统云平台
配电自动化综述
暨南大学 本科生课程论文 论文题目:国内外配电网及自动化系统存在的问 题及发展趋势 学院:电气信息学院 学系:电气工程及其自动化 专业: 课程名称:配电网综合自动化技术 学生姓名:蒋博彦 学号:2011053128 指导教师:李伟华 2014年10月25日
国内外配电网及自动化系统存在的问题及发展趋势 蒋博彦 (1.暨南大学、电气信息学院、电气工程及其自动化、珠海,) 摘要:配电自动化是利用电子、计算机、通信、网络等技术的重要配电手段。本文介绍了国内外配电自动化系统的现状、存在问题及发展方向。 关键词:配电自动化;现状;问题;展望 1.配电自动化系统的组成 配电自动化是指利用现代电子计算机、通信及网络技术,将配电网在线数据和离线数据、配电网数据和用户数据、电网结构和地理图形进行信息集成,构成完整的自动化系统,实现配电网及其设备正常运行及事故状态下的监测、保护、控制、用电和配电管理的现代化。配电自动化系统包含以下三个方面: (1)变电站自动化系统:指应用自动控制技术和信息处理与传输技术,通过计算机硬软件系统或自动装置代替人工对变电站进行监控、测量和运行操作的一种自动化系统。 (2)配电管理系统:是指用现代计算机、信息处理及通信等技术,并在GIS平台支持下对配电网的运行进行监视、管理和控制。主要功能有:数据采集和监控(SCADA)、配电网运行管理、用户管理和控制、自动绘图设备管理地理信息系统(AM/FM/GIS)。(3)用户自动化系统:用户自动化即需求侧管理,主要包括负荷管理、用电管理、需方发电管理等。 2.国内外配电自动化现状分析2.1 国内配电自动化发展和现状 我国配电网自动化起步较晚,到现在不过十多年。1998年之后,随着城乡电网建设与改造的大范围开展,在多个省份和直辖市掀起了第一轮配电网自动化技术试点和应用的热潮。此后我国配电网经过多年的建设和改造,供电能力有了明显的提高,目前已基本能够满足我国社会经济发展的需求。然而,长期以来配电网的建设未得到应有的重视, 建设资金短缺, 设备技术性能落后, 事故频繁发生, 严重影响了人民生活和经济建设的发展,由于当时对配电网自动化的认识不足,相关系统和设备的技术不成熟,配电网架基础比较薄弱、一次配电设备存在缺陷、通信手段不完备、缺乏维护资源等原因,配电网的薄弱环节显得越来越突出。一些早期建设的配电自动化试点没有实现预期效益,部分自动化系统遭到闲置或废弃,成为配电网自动化建设的反面教材。[1] 随着电力的发展和电力市场的建立, 配电网实现自动化是一项综合性工程, 最基本条件是应具有较为完善的多路电源配电网点, 具有较好的城市规划及电源路径分布, 有较为可靠的一次、二次设备,这对城市建设规模和经济发展对配电网提出了较高要求。有不少地区的配电网自动化项目通
电力系统调频综述论文
电 力 系 统 频 率 稳 定 论 文 姓名:韩群 指导老师:刘景霞 班级:2012电气2班
摘要: 电力系统频率调整是电力系统中维持有功功率供需平衡的主要措施,其根本目的是保证电力系统的频率稳定。电力系统频率调整的主要方法是调整发电功率和进行负荷管理。一次调频是指当电力系统频率偏离目标频率时,发电机组通过调速系统的自动反应,调整有功出力以维持电力系统频率稳定。二次调频也称为自动发电控制,是指发电机组提供足够的可调整容量及一定的调节速率,在允许的调节偏差下实时跟踪频率,以满足系统频率稳定的要求。三次调频就是协调各发电厂之间的负荷经济分配,从而达到电网的经济、稳定运行。关键词: 电力系统,一次调频,二次调频,三次调频,综述
ABSTRACT Maintain the power system of power system frequency adjustment is active power balance between supply and demand of main measures, its fundamental purpose is to ensure that the frequency of power system stability. Power system the main method is to adjust the power frequency adjustment and load management. Primary frequency control is to point to when power system frequency deviates from the target frequency generator set automatically by the speed control system of reaction, active efforts to maintain stability of power system frequency adjustment. Secondary frequency modulation, also known as the automatic generation control refers to the adjustable generators provide sufficient capacity and a certain adjustment rate, real-time tracking frequency under the allowed to adjust deviation, in order to meet the requirements of system frequency stability. Three frequency modulation is to coordinate the economic load distribution between the various power plants, so as to achieve economic and stable operation of the power grid. Key words: Electric system , A frequency modulation ,The two FM The three FM , Review
综述电力系统自动化技术分析研究
综述电力系统自动化技术分析研究 发表时间:2016-11-04T16:49:01.773Z 来源:《电力设备》2016年第15期作者:朱亦张小华[导读] 随着自动化技术的深入和发展,电力系统自动化技术面临着更严峻的挑战。 (湖北工业大学湖北省武汉市 430000) 摘要:随着自动化技术的深入和发展,电力系统自动化技术面临着更严峻的挑战。要真正意义上保证电力的安全可靠运行,不断的满足人们的需要,单一的电力系统自动化设备已不能满足新时期电力发展的需求。本文论述了电力系统自动化的概念和特点,对电力系统自动化技术发展前景及方向进行了分析和阐述,可供大家参考。 关键词:自动化;电力系统;技术分析; 当前,电力系统承担着经济发展和人民群众生活提供稳定可靠电能的职责。由于电网规模总量逐年扩张,电网结构复杂和电网建设运行环境多变,电网故障发生的频率和严重程度也越来越高,严重的会直接导致整个电力系统不能正常运行。随着自动化技术的高度发展,建立自动化监控系统已逐步成为现实。通过对系统进行实时监测,能够及时发现问题,自动分析原因,并采取应急措施,从而保障整个电网平稳安全运行,具有十分积极的意义。 1. 电力系统自动化的概念 电力系统自动化是通过应用多种能够实施自动检测、决策和控制的装置,通过信号系统和数据信息传输系统对电力系统的各个部分和整体进行远程监测和控制,来保证整个电力系统的安全、稳定、高效运行,提供优质的供电服务。电力系统自动化控制技术的应用主要是保障电力系统各个生产、供电环节的安全、稳定、高效,实现整个系统经济效能的增加以及生产成本的降低。现代科学技术发展最为显著的特征就是自动化技术在各个领域的应用,电力系统关乎着我国人民群众的生产和生活,更应当通过先进的科学技术提高自身的发展水平。 2. 电力系统自动化技术的特点 2.1 强大的电网规模 电力系统自动化技术的发展,不仅提高了现代供电系统的能力,而且还保证了经济建设的健康、可持续发展,为社会经济的发展做出了重大贡献,也为其打下了坚实的经济基础。电力系统自动化技术主要构成有信息技术、网络技术、电子技术以及控制技术等,这也是电力系统的重要组成成分,其复杂性和综合性也使得整体系统得到很好的运行。由于电网规模的扩大化使得电力系统得到很好的管理,消除了现代化信息和自动化技术之间的问题。 2.2 分布区域大远距离供电 目前,由于我国电力系统的不断发展,其分布领域不断扩大,包括一些环境比较差的地区,这些地区都是高山峻岭,很难进行供电电线的施工,因为不仅成本高,还受到环境条件的限制。合理的解决措施是建立合理数量的供电线路,通过柔性供电技术提高供电电量。自动化技术的这一远距离供电特点解决了很多问题,特别是供电和输电方面。不过,带来的困难也导致了需要不断地提高自动化技术。 3. 电力系统自动化技术应用分析 3.1 智能化控制技术 智能化控制技术的发展一样也经历了多个阶段,从简单的函数单输出单输入控制到线性非线性控制及多级协调控制再到智能化控制,从电力系统的工作模式我们能够发现其属于一种动态的系统,而针对这种动态的系统进行智能化控制对于电力系统工程具有非常重要意义,智能化控制技术能够将电力系统的变化参数加以智能化分析进而得出相应的控制策略,有效的对电力系统进行科学操作,而这一系列过程对于电力系统的工作效率起到了积极的作用。 3.2 电力互感器的应用 电力互感器是针对输电线路检测和维护不可缺少的设备之一,主要功能就是通过以一定比例关系使高电压与大电流数值降低到可以用仪表检测的装置,但是由于电压升高的程度越大绝缘就越难,信号动态范围也就小,设备体积和质量都需要相应增大等一系列问题随之而来造成的不便利和不安全后果,而光电式电力互感器频率响应范围宽、测量精度高、抗电磁干扰、低压侧避免高压危险等特点的具备对于传统的电力互感器是一个很好的在电力线路维护和检查工作中的技术更新,进而得到了电力系统自动化的引进和应用,不过从长远技术要求层面还需要在传感光学材料与传感头结构以及电源供电等方面做出进一步的改进和优化,从而能够更好的促进电力系统的高性能,高效益的产出电能,服务于社会的建设环境当中。 3.3 微机实时保护系统 电力系统微机实时保护系统是由高可靠性、高实时性且高拓展性的装置组成的系统,在技术上精密、通信能力强大且具备嵌入式实时操作系统,所以在硬件设施上要求较高,同时对于嵌入式软件的要求也不断的提高,在对电力系统进行保护的过程中能够实现多任务高效优先级管理并且具有良好的可移植性和拓展性,这也是近年来被越来越多的应用到电力系统自动化中的原因,而这也有效的防止了事故发生时瞬间对电力系统造成的破坏,一旦稳定控制措施发生延迟能够通过嵌入式技术及时的在有限时间内做出反应,确保电力系统免遭损失。 4. 电力系统自动化技术共享能力 在电力系统自动化技术的发展过程中,系统模型大部分集中在对地理空间属性的描述,以几何特征为主的模拟地理系统的思想几乎成为一种标准,但在实际应用中,它的控制对象具有复杂的电力物理结构。建立电力系统特有的空间语义分析模型是非常必要的。这种针对语义层次的数据共享,最基本的要求是供求双方必须对同一数据具有相同的认识,只有基于同一种对电力系统知识的抽象认知才能保证这一点,因此在数据共享过程中要有一种电力系统的基本模型,作为不同部门之间数据共享的基础。它包括两个方面:地理实体几何属性的标准定义和表达,包含电力系统服务所覆盖的空间区域几何属性;物理属性数据的标准定义和表达,对于电力系统,它包含物理结构,各组成部件及整体的物理性能、运行方范的信息共享、综合,以及多维、动态的应用分析。
新型舰船综合电力系统的运行分析及发展_闫飞飞
总第228期 2013年第6期 舰船电子工程 Ship Electronic Engineering Vol.33No.6 14 新型舰船综合电力系统的运行分析及发展* 闫飞飞 陈圣东 刘亚丽 (海军蚌埠士官学校机电系 蚌埠 233012) 摘 要 综述了舰船综合电力系统技术的国内外研究现状和重要意义,以英国45型驱逐舰为例对机组运行进行了分析,讨论了关键设备和技术的发展趋势。 关键词 综合电力系统;舰船电力推进;能量管理系统 中图分类号 TM732 Trend and Analysis of Ship Integrated Power Systems YAN Feifei CHEN Shengdong LIU Yali (Bengbu Naval Petty Officer Academy,Bengbu 233012) Abstract The domestic and foreign research present situation and significance of the ship integrated power system technology are sum-marized.The British type 45destroyer is analyzed on the unit operation,then discusses the development trend of the key equipment and tech-nology. Key Words IPS,electric propulsion,PMS Class Number TM732 1 引言 上世纪90年代,业界提出综合电力系统(IntegratedPower System,IPS)的概念,其显著特点是集成化,将发配电、调度与监控以及推进和高能负荷都集成在一起。在舰船上,电能最初只是作为辅助能源,随着电力推进技术的发展,以及传统上由动力系统提供能量的设备的电力化,电力系统承担了更多的任务,舰船综合电力系统得以出现。上世纪90年代以来,新建造的客轮和破冰船等有超过30%左右均采用了电力推进;在军事领域如英国研发了混合电力推进23型护卫舰和2008年下水的世界上第一艘采用综合电力系统的战斗舰艇45型驱逐舰“果敢”号,美国历时近20年研制的全电力DDG1000新型驱逐舰预计2013年下水[1]。舰船综合电力系统的机组运行方式与传统舰船电力系统相比有着巨大的差异,具有良好的机动性、静音性,节约了机舱空间,目前国内外的发展态势来看,代表了未来的发展方向,我国也高度重视其研究。 2 发展动因和重要意义 舰船采用电力推进技术是综合电力系统技术发展的推动因素,电力推进相比传动的机械推进具备更好的调速特性、机动性、经济性、静音性,如破冰船要求推进系统具备相当强的堵转特性、客轮要求有良好的操纵性、运输船要求有低速航行的经济性、反潜护卫舰等需要推行时有较小的噪音。 传统的舰船中,推进是由大型主机完成而供电系统只 是起到一个辅助的作用,舰船设计时采用电力推进将主动力和供电系统合并,减少了各种原动机的数量,节约了机舱空间,提高续航力以及战斗力;同时可以发挥电能更容易集成、灵活控制的特点,全电力系统高效运行,提高舰船信息化程度;同时省去了传动轴和齿轮箱等,从而切断了舰船向外界传播噪声的途径,提高了舰船的适航性、隐蔽性和生存力。 舰船综合电力系统的典型拓扑结构是环形网络,采用环形电网加上区域配电的供电模式,可以更加合理地分配电能、显著提高舰船生存能力;先进的大功率探测设备以及高能武器具备探测距离远、精度高等更优越的性能,比如飞机电磁弹射和拦阻装置这些先进装备所需电能巨大,唯有采取综合电力系统方案才能解决推进时所需充足动力以及战斗状态下高能电力的矛盾[2]。 舰船综合电力系统技术对舰船设计将产生革命性的影响,代表了未来的发展方向,其重要意义完全可以与从帆船时代进入蒸汽机时代以及核动力舰船的诞生相提并论[3]。 3 机组运行分析 舰船综合电力系统将推进以及日用负载供电等能量进行综合调配,战斗、巡航、进出港及锚泊等不同工况下的电站投入容量差别非常巨大,比如锚泊工况下的负载远远小小战斗工况下的负载。以英国皇家海军45型驱逐舰“果敢”号为例,对其机组运行方式进行分析。 3.1 机组配置 “果敢”号共有两台20MW燃气轮机发电机作为“大机 *收稿日期:2012年12月6日,修回日期:2013年1月17日作者简介:闫飞飞,男,硕士,研究方向:船舶电力系统和电气工程。
电气自动化技术专业综述
电气自动化技术专业综述 谭连记 作为一个高起专电气自动化技术专业的学员,因为平时工作与电为伍,已对电气自动化有一些接触,但像这样系统学习相关理论知识是很难得的。因此我倍加珍惜学习的机会,认真听课,从而对电气自动化技术有了更为深入全面的了解。下面就概述一下我学习的电气自动化技术这个专业。 一、我选择的学校——吉林大学 吉林大学于2000年6月12日由原吉林大学、吉林工业大学、白求恩医科大学、长春科技大学、长春邮电学院合并组建而成;2004年8月29日,原中国人民解放军军需大学并入吉林大学。目前,吉林大学不仅已成为我国目前办学规模最大的高等学府,而且是学科门类最齐全的教育部直属重点综合性大学,是首批进入"211工程"的国家重点建设的大学之一,也是"985工程"国家重点建设的大学之一。学校师资力量雄厚,荟萃了一大批学识渊博、治学严谨的国内外知名学者。 二、电气自动化技术专业定义 电气自动化技术专业主要培养掌握电气技术、电力自动化技术、各种电气设备及自动化设备的基本原理和分析方法,能够从事供用电、各类电气设备、电气控制及自动化系统的安装、设计、调试、维护、技术改造、产品开发和技术管理的高级技术应用性专门人才。开设的主要课程有:C语言程序设计、C语言上机操作、毕业实习、大学英语(二)、大学英语(一)、电机与拖动基础、电力电子变流技术、电路电子技术、电路理论基础、电气元件、高等数学(理专)、工厂供电、计算机应用基础、可编程控制器、控制工程基础、数字电子技术、思想道德修养、微机原理及应用、现代远程学习概论。 三、电气自动化的发展历程 电气自动化经历了从无到有电气自动化技术是随着智能控制、信息网络、电子技术、的飞速发展与电子和信息技术紧密结合在一起的一门电气工程应用技术学科直至发展到成熟的过程。20世纪50年代,电机电力等产品的出现催生了电气自动化才有“自动化”一词的说法。而继电器和接触器设定来完成事先安排好的判断和逻辑功能其出现及应用使得机器可以按照人的意志实现的,促使了电气自动化的发展变革。20世纪60年代,现代控制理论开始出现,伴随着微型计算机在各个行业中的不断的推广与在专业上的实际应用,生产的过程最优化的控制与管理也使自动化进入到了一个全新自动化阶段,电气专业的自动化技术飞速地
电力系统状态估计概述
电力系统状态估计研究综述 摘要:电力系统状态估计是当代电力系统能量管理系统(EMS)的重要组成部分。本文介绍了电力系统状态估计的概念、数学模型,阐述了状态估计的必要性及其作用,系统介绍了状态估计的研究现状,最后对状态估计的研究方向进行了展望。关键词:电力系统;状态估计;能量管理系统 0 引言 状态估计是当代电力系统能量管理系统(EMS)的重要组成部分, 尤其在电力市场环境中发挥更重要的作用。它是将可用的冗余信息(直接量测值及其他信息)转变为电力系统当前状态估计值的实时计算机程序和算法。准确的状态估计结果是进行后续工作(如安全分析、调度员潮流和最优潮流等)必不可少的基础。随着电力市场的发展,状态估计的作用更显重要[1]。 状态估计的理论研究促进了工程应用,而状态估计软件的工程应用也推动了状态估计理论的研究和发展。迄今为止,这两方面都取得了大量成果。然而,状态估计领域仍有不少问题未得到妥善解决,随着电力系统规模的不断扩大,电力工业管理体制向市场化迈进,对状态估计有了新要求,各种新技术和新理论不断涌现,为解决状态估计的某些问题提供了可能。本文就电力系统状态估计的研究现状和进一步的研究方向进行了综合阐述。 1 电力系统状态估计的概念 1.1电力系统状态估计的基本定义 状态估计也被称为滤波,它是利用实时量测系统的冗余度来提高数据精度,自动排除随机干扰所引起的错误信息,估计或预报系统的运行状态(或轨迹)。状态估计作为近代计算机实时数据处理的手段,首先应用于宇宙飞船、卫星、导弹、潜艇和飞机的追踪、导航和控制中。它主要使用了六十年代初期由卡尔曼、布西等人提出的一种递推式数字滤波方法,该方法既节约内存,又大大降低了每次估计的计算量[2,4]。 电力系统状态估计的研究也是由卡尔曼滤波开始。但根据电力系统的特点,即状态估计主要处理对象是某一时间断面上的高维空间(网络)问题,而且对量测误差的统计知识又不够清楚,因此便于采用基于统计学的估计方法如最小方差估计、极大验后估计、极大似然估计等方法,目前很多电力系统实际采用的状态估计算法是最小二乘法。 1.2电力系统状态估计的数学模型 状态估计的数学模型是基于反映网络结构、线路参数、状态变量和实时量测之间相互关系的量测方程: z+ =) ( h v x 其中z是量测量;x是状态变量,一般是节点电压幅值和相位角;v是量测误差;z和v都是随机变量。 状态估计器的估计准则是指求解状态变量x的原则, 电力系统状态估计器采用的估计准则大多是极大似然估计, 即求解的状态变量x*使量测值z被观测到的可能性最大, 用数学语言描述, 即: z f x f= z (x , )] , ( *) max[ 其中f(z)是z的概率分布密度函数[3]。
变电站综合自动化系统的综述
变电站综合自动化系统的综述 张飞1张建超2张天玉3 1.长沙电力职业技术学院电力工程系;湖南,长沙,410131 2.贵州大学,电气工程学院;贵州,贵阳,5500033.尉氏县供电公司;河南,尉氏,475500 摘要:随着科学技术的不断发展,计算机已渗透到了世界每个角落。电力系统也不可避免地进入了微机控制时代,变电站综合自动化系统取代传统的变电站二次系统,已成为当前电力系统发展的趋势。变电站综合自动化系统以其简单可靠、可扩展性强、兼容性好等特点逐步为国内用户所接受,并在一些大型变电站监控项目中获得成功的应用。 关键词:变电站综合自动化系统电力系统电网监控通讯网络 1概述 要提高变电站运行的可靠性及经济性,一个最基本的方法就是要提高变电站运行管理的自动化水平,实现变电站综合自动化,所谓变电站综合自动化,就是广泛采用微机保护和微机远动技术,分别采集变电站的模拟量、脉冲量、开关状态量及一些非电量信号,经过功能的重新组合,按照预定的程序和要求实现变电站监视、测量、协调和控制自动化的集合体和全过程,从而实现数据共享和资源共享,使变电站设计简捷、布局紧凑,使变电站的运行更加安全可靠。 2变电站自动化 变电站是电网参数和各种信息的主要来源和枢纽,是保护、数据采集、控制以及数据共享的对象,因此是实现自动化的重点,变电站自动化SA是指能够不经干预的,在一个或多个变电站内进行数据采集和控制,包括微机保护、微机监控及自动调控等智能电子装置,实现电网运行工况监视、继电保护、综合调控、远动、接口以及信息管理等,是一项集控制技术、计算机应用、数据传输、现代化设备及管理于一身的综合信息管理系统,其目的是提高供电可靠性,改进电能质量,降低运行费用,减轻运行人员的劳动强度。 2.1继电保护 继电保护是保障电力设备安全和电网稳定运行的最重要、最有效的技术手段,随着我国电力系统向大机组、高电压、现代化大电网发展,继电保护技术及应用水平也取得了长足的进步。 2.1.1微机保护 微机保护是以微处理机作为基本的实现手段和方法,具有长记忆特性和强大的数据处理能力,通过快速数字处理实现故障诊断、出口、通讯以及更为复杂的控制功能,功能完善、使用维护方便、智能化程度高、体积小、适应一次系统灵活性大,以超强的技术性能、可靠性为整个电力系统的专家层、决策者、应用面所接收而得到了广泛的应用。 2.1.2网络保护 网络保护是以局域电网为对象的系统保护。各变电站之间通过光纤建立系统联网,使各单元保护之间可以快速传递控制信号,及时获取过程数据和信息,从而做出最优的选择,进一步提高响应的速度和灵敏度。网络保护的关键是快速有效的通讯技术,因而光纤得以广泛的应用。网络化概念也是未来继电保护和安全自动装置的重要特征。 2.1.3预测保护 保证系统安全稳定运行是所有电力工作者追求的永恒主题,如何预测故障,准确地捕捉故障的早期特征,在故障给系统造成冲击以前切除故障对于提高系统稳定性、延长电气设备的使用寿命是非常有意义的。比如ULP机组失磁保护在机组失磁以后,测量阻抗在还没有进入异步运行下,抛阻抗圆(系统失步)以前,根据有功和励磁电压的变化提前确定故障并迅速跳闸,避免由于系统失步引起的系统电压降低和转子发热和震动。预测保护是未来继电保护的发展趋势,也是对电力科技工作者新的挑战。 2.2监测控制 电网监控SCADA/EMS是变电站自动化系统的主要功能之一,早期主要指“四遥”功能,现在SCADA的内容已经涉及到故障检测、网络优化、提高电网运行效率、 降低线损的 32电气工程应用2011.1
区域电力系统分析文献综述
附录1 区域电力系统规划设计及最优励磁控制的文献综述 在高速发展的现代社会中,电力工业是国民经济的基础,在国民经济中的作用已为人所共知:它不仅全面地影响国民经济其它部门的发展,同时也极大地影响人民的物质和文化生活水平的提高,影响整个社会的进步。改革开放以来,电力工业取得了突飞猛进、举世瞩目的辉煌成就,从1996年起,我国发电机装机容量和年发电均居世界第二位,超过了俄罗斯和日本,仅次于美国,进入世界电力生产和消耗大国行列。发电厂规模和单机容量的大幅度提高,标志着我国的电力工业已经进入一个飞速发展的新时期[6] 。 电能是现代社会中最重要、也是最方便的能源。电力系统是由电能的生产、输送、分配和消费的歌环节组成的整体,它与其他工业系统相比,具有很多的特点: 1 电能的生产和消费具有同时性 由于电能的生产和消费是一种能力形态的转换,要求生产与消费同时完成,因此电能难于储存。从这个特点出发,在电力系统运行时就要求发电厂在任何时刻发出的功率,必须等于该时刻用电设备所需的功率、输送和分配环节中的功率损耗之和[7]。 2 电能与国名经济各部门和人民日常生活关系密切 由于电能可以方便地转化为其他形式的能,且易于远距离传送和自动控制,因此得到广泛的应用。供电的突然中断会产生严重的后果。 3 电力系统的过度过程非常短暂 由于电能以光速传播,所以运行情况发生变化所引起的电磁和机电过度过程十分短暂。电力系统正常操作和发生故障时,从一种运行状态到另一种运行状态的过渡极为迅速,这就要求必须采用各种自动装置(包括计算机)来迅速而准确地完成各项调整和操作任务[8]。 从电力系统以上的特点出发,根据电力工业在国民经济中的地位和作用,决定了对电力系统运行有一下要求: 1 保证安全可靠地供电 电力系统供电中断将使生产停顿、生活混乱、甚至危及人身和设备安全,给国民经济带来严重的损失。为此,首先要保证电力设备的产品质量,努力搞好设备的正常运行维护;其次,要提高运行水平和自动化程度,防止误操作的发生,在事故发生后应尽量防止事故扩大,等等。
电力系统厂站及调度自动化综述 陈宗来
电力系统厂站及调度自动化综述陈宗来 发表时间:2019-04-17T16:04:52.443Z 来源:《基层建设》2019年第5期作者:陈宗来 [导读] 摘要:本文首先介绍了传统系统存在的问题,围绕传统系统的问题,本文深入探讨了电力系统自动化的各项内容,并且提出了电力系统厂站及调度自动化需考虑的问题。 山东魏桥铝电有限公司山东省滨州市 256200 摘要:本文首先介绍了传统系统存在的问题,围绕传统系统的问题,本文深入探讨了电力系统自动化的各项内容,并且提出了电力系统厂站及调度自动化需考虑的问题。本文的研究具有重大的理论价值,并且为电力系统厂站自动化提供依据。 关键词:电力;系统;调度;自动化;发展;趋势 前言: 随着我国经济的发展和人们物质生活水平的不断提高,我国电力体制改革工作的不断实现并取得成效,电网联网的进程日渐加快以及人们对于电力系统的安全性和稳定性更高的要求,这些都直接导致了电力企业对厂站及调度自动化系统的研发与运用的迫切需求。因此,对新时期电力系统厂站及调度自动化的发展研究是一个非常值得深入研究的课题。 一、电力系统自动化的发展历程 随着电力行业的不断发展,电力系统的自动化发展历程也经历了三个阶段,首先是元件自动化阶段,其次是局部自动化阶段,最后是子系统自动化的发展阶段。在电力系统自动化发展过程中,电力行业分别经历了传统理论阶段、控制理论阶段以及市场理论阶段,电力系统与科技理论结构后,形成了自动化电力系统,这一系统一直沿用至今,而且仍然在不断的发展与更新。 在电力系统自动化发展初期,电信数据主要是向技术人员展现运行状况,技术人员以及调度人员比较具有较强的感知能力以及随机应变能力,其需要完成较为复杂的操作流程,而应用自动控制技术后,有效减轻了调度人员的工作量,简化了操作,提高了电力调度的工作效率。在科技不断发展的形势下,电力系统远程控制以及调试装置逐渐形成了较为完整的系统,在电力系统调度的过程中,通过加入电力调度技术,提高了电力系统厂站与调度运行的效率,而且提高了企业的经济效益。传统的电力系统调度模式,已经无法适应电网高效运行的要求,而且容易导致停电现象,应用电力系统厂站与调度的自动化模式,可以满足电网安全、可靠运行的要求。 电力系统自动化模式,需要应用先进的计算机技术以及通讯技术,其在不断发展与完善的过程中,形成了集多种功能于一身的完整体系,具有通信、电力传输等多项功能。为了保证自动化电力系统更好的运行,电力技术人员必须掌握基础知识以及专业技能,还要在日常的工作中不断积累经验,专业才能保证电力调度工作的顺利进行。电力系统为了更好的满足大众的需求,必须在电力系统中安装自动控制与调度的设备,还要对设备运行状况进行必要的监控,做好维护工作,保证设备能够安全、稳定的运行。 二、传统系统存在的问题 调度自动化系统直接面向调度员和操作员,对电力系统进行实时控制,是调度最为重要的电力二次系统。事实上,传统调度自动化系统在电力系统运行调度中发挥了不可替代的重要作用。 1、系统接口问题 调度自动化水平的不断提高和市场体制的向前推进,使调度产生很多自动化系统,如调度自动化系统、配电自动化系统、电能量计量系统等,每个子系统包含许多应用功能。这些系统或功能相互之间需要交换各种数据,而它们往往又来自不同的厂家,在不同的时期分批建设,因此,不同系统和不同产品之间的接口非常重要。 2、网络安全问题 在传统调度自动化系统中,没有一个完整的网络安全考虑,不同安全性要求的系统之间没有必要的安全防护措施。WEB服务可穿透到调度自动化系统,为黑客提供了通路。拨号服务可直接登录到调度自动化系统,没有必要的访问控制。实时控制系统和生产管理系统没有安全的隔离措施,隐患很大。网络化是调度自动化系统外部系统接口的必然趋势,网络安全是需要着重考虑的问题,系统之间必须是安全的互联,安全的信息共享和资源共用。传统系统组网方式多种多样,在网络安全方面的考虑比较薄弱,是迫切需要解决的问题。 3、系统开放性问题 开放性是调度自动化系统的一个重要指标,涉及到系统结构、数据和功能等多个方面。限于当时的技术条件,传统系统的开放程度还不高,主要表现在:(1)数据的开放性。传统系统仅在系统软件层采用了TCP/IP、Motif和sQT等标准,但应用层没有标准化,正如前文所述,接口都是私有的,没有规范化的信息模型。(2)结构的开放性。传统系统基本上属于一种功能分布式系统,根据功能不同,把软件部署在相应的计算机节点上,同一功能软件内部耦合得很紧,系统结构的扩展和延伸对原有系统影响很大。(3)功能的开放性。传统系统不同功能模块之间,与外部系统之间不具有互操作性,软件功能的可重用性较低。 三、电力系统厂站及调度自动化需考虑的问题 1、应对电力市场化有充分的认识 竞争围绕产品的“质”和“价”进行,质优价廉必然会赢得用户的青睐。企业应随时掌握市场动态,尽快建立起信息灵通、反映快捷的市场营销体系。 2、电网改造与自动化的关系 电网改造的一个重要目的是提高供电质量可靠性。要实现这个目标,一方面要完善网架结构,另一方面要逐步建立完善的电网自动化系统。 3、作好自动化的规划 首先,要克服安于现状和对自动化无所作为的思想,事前作好电网自动化建设规划。其次,要注意基础自动化工作。新建厂站可按重要程度分别采取全自动微机监控、部分微机监控和微机监测的模式。35kV的变电站应采用无人值班模式。要把老厂站技改,特别是励磁和调速器技改要与微机监控系统接口,尽可能把用于机组自动化的极不可靠的继电器硬线逻辑,改换为PLC的程序存贮逻辑。 4、采用internet/intranet建立和完善已有的调度自动化系统。要将调度自动化系统建成为电网自动化的主站,一是新建的SCADA应有“四遥”功能,原有的SCADA应进行升级换代使之具有“四遥”功能;二是应用internet/intranet技术把MIS系统与SCADA结合形成一体化的电网自动化系统,并籍internet/intranet建立地电系统的县网、跨县网综合网络,以完善电网内的信息交换。