2014自动控制原理综合课程设计

自动控制课程设计
指导老师
专业电气工程与自动化
姓名
学号
2013 年 12 月
一、设计任务
单位负反馈系统的开环传递函数如下,采用串联控制:
)15.0)(125.0(3
)(++=
s s s s G
1.请用PID 控制和校正装置(超前、滞后或滞后-超前装置)设计控制器,使系统满足:截止频率>25rad/s ,相角裕度>45度,幅值裕度>20dB 。并在MATLAB 下仿真和比较系统在校正前、后的系统在给定输入为r(t)=1(t)时的时域响应。
2.请用PID 控制设计控制器,使系统在斜坡输入条件下稳态误差为0,调节时间至少小于9s ,超调量至少小于40%,尽量整定至最优。并在MATLAB 下仿真和比较系统在校正前、后的系统的时域响应过程。
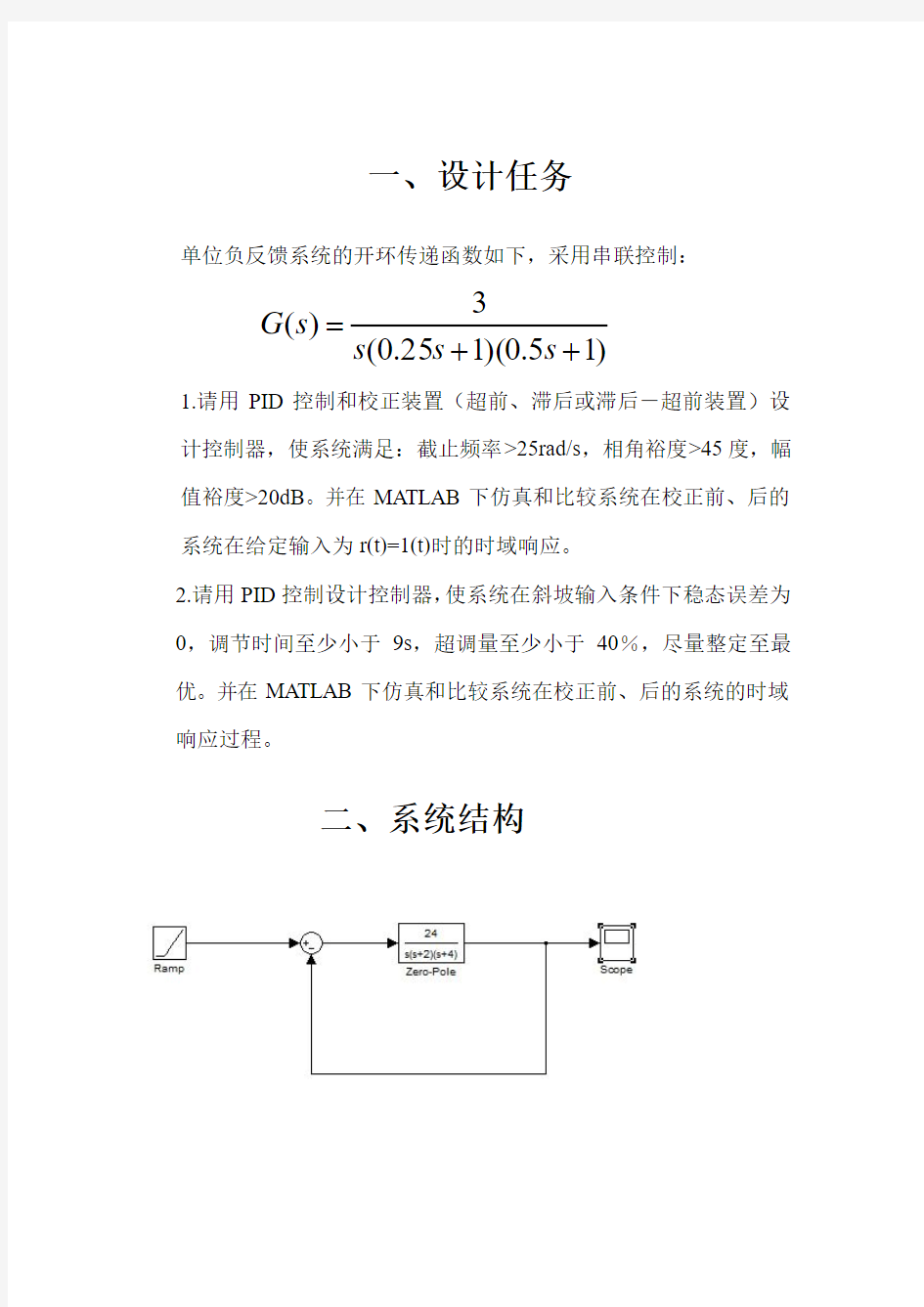
二、系统结构
三、未校正系统分析
在校正前,系统各参数都不满足要求,系统也不稳定,下面对系统进行频域和时域分析,并且在MATLAB 上仿真,得到各指标。
Bode Diagram
Gm = 6.02 dB (at 2.83 rad/sec) , P m = 20 deg (at 1.94 rad/sec)
Frequency (rad/sec)
M a g n i t u d e (d B )
10
10
10
10
10
P h a s e (d e g )
系统开环对数幅频和相频曲线
对系统开环传递函数进行频域分析,得到如上伯德图,则各项指标如下: 开环系统截止频率为1.94rad/s ,幅值裕度为6.02dB ,穿越频率为2.83rad/s ,相角裕度为20dB.
-100
-80-60-40-200
20M a g n i t u d e (d B
)10
10
10
10
-270
-180
-90
P h a s e (d e g )
Bode Diagram
Frequency (rad/sec)
系统闭环对数幅频和相频曲线
Step Response
Time (sec)
A m p l i t u d e
024681012141618
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
闭环系统单位阶跃响应曲线
由闭环系统单位阶跃响应曲线的以下指标: 1.峰值时间:tp=1.62s. 2.调节时间:ts=8.17s. 3.上升时间:tr=1.01s. 4.超 调 量:()()
%100%()
c tp c c δ-∞=
?=∞56%
四、滞后-超前校正
1.取Wm=Wc ’=5.71rad/s,则由校正前的伯德图得L ’(Wm)=-20,有公式10loga=20,解得a=100,T=0.017513,因此超前网络传递函数为:100Gc(s)=
1 1.7510.0175s
s
++ 为了补偿无源超前
网络产生的增益衰减,放大器的增益需提高100倍,否则不能保证稳态误差要求。
超前网络参数确定后,已校正系统的开环传递函数为:G(s)=3(1 1.75)
(10.25)(10.5)(10.0175)
s s s s ++++ 其伯德图如图1所示:
-150-100-50050
100M a g n i t u d e (d B )10
10
10
10
10
10
-270
-225-180-135-90-45P h a s e (d e g )
Bode Diagram
Gm = 18.2 dB (at 17.8 rad/sec) , P m = 43 deg (at 5.7 rad/sec)
Frequency (rad/sec)
(图一:第一级超前校正)
2.由于第一级超前校正截止频率还差很多,所以还需采用超前校正进一步完善。取Wc=19.7rad/s ,,则由图一得L ’(Wm)=-20,有公式10loga=20,解得a=100,T=0.005076,因此超前网络传递函数为:100Gc(s)=
10.507610.005076s
s
++ 为了补偿无源超前网络产生的增益衰减,放
大器的增益需提高100倍,否则不能保证稳态误差要求。
超前网络参数确定后,已校正系统的开环传递函数为:
3(11.75)(10.5076)
()(10.25)(10.5)(10.0175)(10.005076)
s s G S s s s s ++=
++++ 其伯德图如图2所示:
10
10
10
10
10
10
10
-270
-180
-90
P h a s e (d e g )
Bode Diagram
Gm = 22.2 dB (at 110 rad/sec) , P m = 75.2 deg (at 19.7 rad/sec)
Frequency (rad/sec)
-150
-100-50050
100M a g n i t u d e (d B )
(图二,超前校正第二级)
3.通过一二级超前校正,各指标依然不满足要求,对此时如果还用超前校正,幅值裕度就会不满足要求,所采用滞后校正。由于要求
45,=γ?γ>???并且估值(Wc )=-6,所以求得(Wc )>51,当取Wc 25rad/s 时,正好满足。
所以取Wc=25进行校正。由图二的L (Wc )=-2.39,所以20lg 2.39b =,解得b=1.30918,
又有公式
1
0.1*Wc Tb
=,得T=0.30553,所以滞后网络的传递函数为: 10.4
()10.30553s Gc s s
+=+,得校正后的传递
函数:
3(1 1.75)(10.5076)(10.4)
()(10.25)(10.5)(10.0175)(10.005076)(10.3055)
s s s G S s s s s s +++=
+++++绘出伯德图如下图
三:
-150
-100-50050
100M a g n i t u d e (d B )10
10
10
10
10
10
10
-270
-180
-90
P h a s e (d e g )
Bode Diagram
Gm = 20 dB (at 111 rad/sec) , P m = 68.7 deg (at 25 rad/sec)
Frequency (rad/sec)
通过这三级校正后,频域指标以满足要求,接下来针对时域进行仿真分析,验证时域指标是否满足要求,下图是校正后的系统单位阶跃响应曲线:
0.10.20.30.40.50.6
0.70.80.91Step R esponse
Tim e (sec)
A m p l i t u d e
上图分析得,时域指标也满足。
五、PID 校正
1.校正前,对系统进行仿真,结构图和仿真图如下:
2.采用PID控制器校正系统,在MATLAB上采用图一的结构图,试参数,并运行得到图二的仿真图。
(图一)
当输入为阶跃时,仿真结果如下:
由图可知调节时间小于9s,超调量小于40%。指标满足要求
六、总结
通过此次课程设计,我进一步掌握了MA TLAB应用软件的相关内容,并且熟悉了其编程及仿真的应用,同时也提高了我对系统结构的分析能力,此外,还增加了对系统伯德图的认识。总之,在此次课程设计中,我学到了很多新知识,这些实际应用中学到的东西更真实,更接近生活,是平时在课本上无法学到的,我知道了怎没应用课堂上学习的理论知识,这样掌握的更牢固。通过此次设计,我了解了动手能力的重要性,理论与实际结合。希望在以后的学习中,能有更多的机会动手练习,把书中学到的理论知识应用到生活中。
参考文献
胡寿松.2007.自动控制原理.6版.北京:科学出版社
李友善.1989.自动控制原理(修订版).北京:国防工业出版社
戴忠达.1991.自动控制理论基础.北京:清华大学出版社