光流控
文摘:荧光共振能量转移(FRET)是一种很有前途的手段,使信息处理在纳米器件,但动态控制激子通路是必需的。在这里,我们将演示两种互补的操作开关组成的输电线路中扩散烦躁激子流是由DNA。可重复的切换可以通过移除或添加fluorophores 通过toeholdmediated链入侵。原则上,这些开关可以联网来实现任何布尔函数。关键词:DNA、烦恼、激子的开关、分子传输线、分子编程、布尔逻辑
的一种推动力量在纳米领域的的发展是高度紧凑的信息处理设备。一个潜在的方法对纳米级电路结构是使用单个分子作为电路元素强调自下而上的加工技术和自组装。1分子光子设备显示的承诺是一种信息处理的纳米级。2、3扩散能量转移在分子光子设备可以通过相邻分子之间通过荧光共振能量转移(FRET),它包括了激子的能量直接转移之间fluorophores通过偶极子?偶极耦合。 4
一个挑战与实现相关的烦恼在设备的精确定位是纳米尺度的fluorophores到安排,促进有效的能量转移。DNA纳米技术提供了一个良好定义的、可编程框架在分子水平上fluorophores 操纵。1、5?15多个研究报告光谱技术获取信息关于结构和光子性质的fluorophores绑定到DNA分子。16?19例如,担心被用作意味着距离测量在DNA和RNA的螺旋线供体和受体fluorophores绑定到特定的核苷酸和推断他们的分离距离测量的烦恼效率。16、19 DNA折纸技术已经用于安排fluorophores,引入更大的结构刚度和设计灵活性,基于dna的烦恼设备14、15
能够动态地控制烦恼是必要的,如果它是被有效地用于电路设计。Hannestad等人最近报道了基于烦恼光子网络中激发能量可以定向到任何一个两个输出基于存在的情况下,插层染料。20在这里,我们报告两个dna控制开关的设计是基于烦恼来使可编程动态控制的激子的能量流。process21 strand入侵,把一个切断通过移除一个荧光团转其他开关通过移除一个冷却器。第
二个链入侵过程恢复生色团,允许开关是反复循环的通过他们的开关状态。这两个开关是互补的,一个完成的逻辑否定的函数执行的其他开关。逻辑和功能可以实现级联这种开关系列、逻辑或功能
实现并行相结合这样的开关。在原则,这种交换机可以联网来实现任何布尔函数的缺席或存在激子的能量传递通过一个开关对应一个逻辑零或一个分别和输出是缺少或存在的荧光信号在输出荧光团
探索的可行性在分子尺度转换光子电路,两种截然不同的方法被用来启用动态控制开关发射状态。这个设计,开关1和开关2标签,见图1 a和b板,分别和链序列和染料细节是提供在支持信息S1。两开关由一个蛇形DNA脚手架链(黑)杂化三个短链使用八个独立的序域,每个14个核苷酸(nt)长,跨界车隔开。第四个“控制”链调节激子的能量流在开关,如下面所讨论的。的主食之一股(蓝色)包含输入染料FAM公司。另一个短链(红色)包含输出染料Cy5。在开关1(图1),第三个短链(灰色)提供结构完整性,而控制链(绿色)包含中间染料TAMRA。当所有五链杂化,开关1是在国家,和七个碱基对(bp)单独输入染料从中间染料和中间染料从输出染料。三个染料的开关1形成一个线性激子的输电线路沿着一条单独的DNA双螺旋允许激发能量流从输入染料通过中间染料到输出染料。
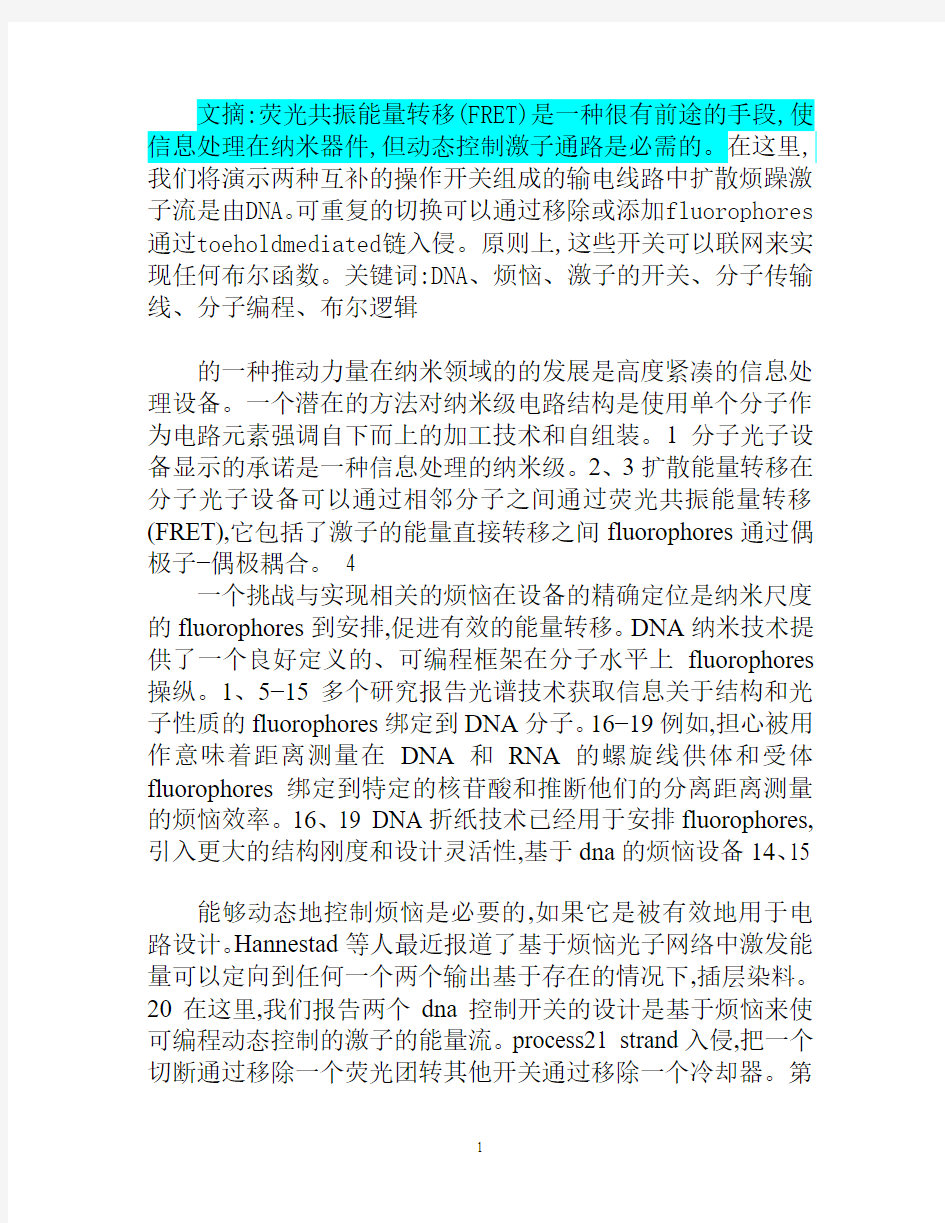
图1。图式的循环过程对开关动态烦恼建立输电线路通过DNA链入侵。(一)当开关1是在
其在国家,TAMRA-functionalized控制链(绿色)连接到支架(黑色),导致一个完整的输电线路。这个去除1股(深绿色)其中杂交与控制链,消除TAMRA染料从脚手架和打断烦恼,开关设备的关闭状态。恢复烦恼并返回设备其在状态,返回1股(橙色)其中杂交的去除1股,释放控制链和允许TAMRA染料重返支架。(b)当开关2是在关闭状态,IBRQ(冷却器)的硫化控制链(棕
色)附加到脚手架,淬火Cy5发射。当控制链是流离失所移除2链(粉红色),发射不再压制和设备进入国家。当控制链恢复经由返回2股(暗橙色),发射再次镇压,返回设备的关闭状态。链的长度,得出所有站稳脚跟规模大约
动态调节能量流,控制链拥有一个14元长立足点序列能够将开关通过立足介导链入侵。21开关1,删除链(去除1图1 a)为辅的立足之地的控制链和10的14个核苷酸绑定控件条到开关。当删除链完全其中杂交与控制链,只有四个核苷酸绑定控件条到开关支架,控制链自发解离从脚手架。22所示,图 1 a,TAMRA移除,烦恼的基础能源传输是可能只有通过直接转移之间FAM公司
和Cy5。根据~5 nm分离和低光谱重叠,耦合效率直接Cy5 FAM来转移是低,开关1是在关闭状态。为了恢复开关其在国家,移除链包含一个10元长立足点允许它分开控制链被第二个链入侵,产生一种惰性废物的产品。返回链(图1中返回1 a)补充所有但五的核苷酸链切除。虽然这个设计要求控制链自发使分离去除链,它减少了序列共性的控制和返回线来只有五个核苷酸。因此,直接交互的回报链与脚手架的开关应该是最小的。一旦控制链是流离失所的人从移除链,控制链可以rehybridize与开关支架和恢复开关1到其在国家。
开关2(图1 b)更复杂的比开关1和被设计用来展示互补(逆)行为。在开关2,第三短链(绿色)包含
中间TAMRA染料,而控制链(布朗)包含一个爱荷华州黑红色冷却器(IBRQ)3′端。IBRQ的定位在两个核苷酸的Cy5输出。因此,当所有五股是杂化,开关2在断开状态;能量流,对Cy5 TAMRA从家人是允许的,但发射从Cy5减弱了能源转移到IBRQ。类似于开关1,控制链就可以被链入侵与删除链(去除2在图1 b)。与IBRQ除去的开关,开关2是在其国家:激子的能量流从厘清
通过对Cy5 TAMRA,Cy5发射是允许的。恢复开关2到关闭状态是通过链入侵与回归链(返回2图1 b),类似于开关1。基于这些互补开关设计,逻辑高转换在一个开关对应逻辑低转换其他。所有的开关都是购买的寡核苷酸从集成的DNA 技术冻干,溶液在过滤超纯水(毫问水,微孔),并使用没有进一步的净化(序列和制造商净化方法都列在支持信息S1)。通过自组装合成的开关由结合脚手架链与20%摩尔过剩的短链在溶液1×跆拳道,Mg2 +(40毫米三,20毫米醋酸,2毫米ethylenediaminetetracetic酸(EDTA),和12.5毫米醋酸镁;pH值8.0)。跆拳道、镁醋酸四水,过滤超纯水是从西格玛奥德里奇购买。对于开关、合成是执行没有控制链,导致更好的开关性能。因此,开关1合成的在关闭状态,开关2的合成在国家。一旦结合,DNA的解决方案是在90°C退火5分钟然后冷却到室温在0.3°C /分钟~使用热循环仪(Mastercycler,埃普多夫)。合成开关经过纯化用3%的琼脂糖凝胶在100 V为120分钟。来确定开关乐队,完成的凝胶使用多路复用荧光成像探测和凝胶文件系统(FluorChemQ,ProteinSimple)。这个激励源被选中来激发FAM 染料,和
检测滤波器被选中传递只有Cy5发射,因此允许清晰识别的格式良好的FRETbased乐队输电线路的开关2,见支持信息S2。通过比较凝胶乐队和使用开关2一个控制巷,开关1可能设在,甚至在
关闭状态。确认开关乐队摘除的凝胶,提取和开关使用冻结' N挤压列(bio rad实验室)。一旦提取、浓缩开关是量化通过测量吸收在260海里(光度适应计,埃普多夫)。的基础上测量浓度,一个化学计量量的控制链被添加到脚手架方案和允许杂交与脚手架在室温下放置30分钟。与控制链补充道,开关1是在国家和开关2是在关闭状态。
动态光学开关的烦恼的基础传输线路特点使用卡里Eclipse荧光分光光度计(安捷伦科技)。传输
线是兴奋波长450 nm(内下降FAM激发光谱但TAMRA和Cy5之外的激发光谱),在Cy5荧光强度发射波长的667海里是随着时间的监控。这测量提供了一个直接探测的状态输电线路。循环状态之间的转换是通过添加删除并返回链在增加过量浓度根据m(1.5)n,m是摩尔数的开关和n股注入号码。因此,第一个删除链被注射一个摩尔超过50%。确定为交换机烦恼效率,厘清染料很兴奋在450 nm和发射光谱的每个设备状态记录了从500年到800海里。
图2和图3总结结果的转换流程。为了确保开关的每一个可用的瓷砖,切换反应如图2完成成倍增加的浓度的去除和返回股,如上所述。因此,每个开关反应非化学计量和参与竞争的反应之前的股。然而,确定控制链删除和恢复速率常数如表1所示,交换反应进行使用化学计量大量的所有链,和数据是适合二阶反应动力学描述的在支持信息S3。在图2中,交换反应动力学实验演示循环切换的传输状态对于开关。对于开关1(图2),Cy5荧光强度降低为去除链取代了控制链和移除从输电线路的TAMRA。当TAMRA链被恢复,荧光强度增加到刚刚低于其原始水平。相反,对于开关2 Cy5强度增加当控制链是流离失所的和被删除的IBRQ(图2 b)。恢复控制链切换2造成Cy5强度降低toapproximately原有水平。表1列出了平均损失上的状态信号(使用性能)重复由状态转换,使用分段计算比率的国家Cy5排放强度作为开关是重复和调整稀释,SupportingInformation S3中描述。此外,状态转移率计算使用二阶反应动力学方程,如下所述,在支持信息S3。
图2。开关反应动力学数据展示Cy5变化荧光强度由于控制链删除和恢复。(一)重复切换开关1,表明引入删除链开关设备其关闭状态和介绍返回链恢复其在国家。(b)反复切换开关2,显示了逆传输行为作为开关1。动力学数据进行归一化,除以平
均值最初的国家荧光。强度峰值期间产生的移液已经删除的数据。原始的动力学数据提供支持信息S3。
图3。完整的荧光光谱为开关1(a)和(b)开关2在他们的开关状态。被收购的发射光谱与一个激发波长450 nm激励只有厘清染料。这个峰观察对应发射峰的个人染料:FAM(520海里),TAMRA(580海里),Cy5(670海里)。对于开关1,切除控制链消除了TAMRA峰和Cy5峰值降低。对于开关2,只有Cy5峰值显著受冷却器的控制链。每个光谱是归一化除以浓度的开关。
发射光谱的每个开关都打开和关闭州是图3所示。确保适当的化学计量学对于担心效率计算,开关被准备与所有股需要每个州,然后经过琼脂糖凝胶电泳,如上所述。开关光谱演示发射峰对于每个染料输电线路和峰强度不同,关闭状态。没有TAMRA在开关1,TAMRA峰突然失踪了,Cy5峰是减少(图3)。当IBRQ缺席开关2,Cy5峰更强烈相对于开关2 IBRQ(图3 b)。最小二乘拟合的发射光谱与单个染料光谱是用来计算总体效率为每个开关的烦恼,中描述的在支持信息参考10和S4和总结在表1。动态控制的能量转移显然是观察两个开关设计(图2),在国家Cy5的比率
荧光来断态荧光表1中列出,在那里可以看到开关2的开/关比率是结束了吗两次,对于开关1。这个大的差异,开/关比率交换机间差异的结果在开关的设计。对于开关1,关闭状态是通过切除中间TAMRA离开家人和Cy5隔开14元。尽管小重叠的FAM和Cy5发射和激发光谱,分离是只有14元不足以完全防止烦恼FAM和之间Cy5。证据之间的烦恼和Cy5 FAM也在关闭状态观察频谱开关1(图3),在Cy5发射是观察当TAMRA 缺席呢从瓷砖。相比之下,很少Cy5发射检测
在关闭状态的开关2(图3 b)。的存在IBRQ在断开状态有
效地扑灭了Cy5荧光,导致一个阴暗得多比这断开状态开关1。黑暗的断开状态可以归因于IBQR附近,Cy5(2元),这导致高效烦恼。
除了显示一个低开/关状态比,图2一个显示在状态强度为开关1下降每个周期明显。在国家的平均强度降低每个周期是6%超出了预期下降7%为稀释当删除并返回股注入。因为从状态匹配强度降低的预期稀释减少,整体的开/关开关1的比率降低了每个周期。这整体强度降低的可能反映不完整的恢复控制链,这可能源于不完整杂交在两个步骤:(1)如果返回串并不是杂交以100%的去除股,一些控制股会继续绑定到删除链;(2)如果一些控制股并没有完全rehybridize支架股被释放后移除链。到确保完成和关闭状态转换、移除和返回链被注射了一种50%摩尔过剩了股前状态。这个过程应该确保删除或恢复每一个可能的控制链,然而意想不到的交互或二级结构的形成可能是抑制控制链恢复。一个类似的抑制,控制链恢复都观察开关2,这里的打开和关闭状态强度略超出值预期从稀释。虽然序列的顺序域的控制股开关1和开关2逆转,两个开关使用相同的殖民地。因此,开关2可以将显示类似的缺乏控制链吗修复。然而,由于控制链开关2包含IBRQ相反的作用比开关1,整体荧光强度增加每周期一个增加一部分开关2瓷砖留在了上状态。这种效应被认为在周期得到表1中所列出的,这显示了一个2%增加稀释纠正荧光吗每个周期。
在开关设计的差异也反映在状态转换利率所产生的控制链切除或修复。去除率为开关2近6倍
大于开关1,而恢复率在一个因子2(表1)。较高的去除率为开关2可能反映了这样的事实:控制链脚手架域为开关2是四核苷酸短比开关1。然而,在这两种情况下切除控制链是一个三链
分支迁移过程,可以描述为一维随机漫步,平均完成时间的n2τ,23岁,其中n是碱基对的数目和τ是的意思步骤时间。估计τ是50μs或less23收益率最大走的时候~10 ms,这远远低于中场休息为状态转换为两个开关。因此,它是不可能的不同的控制链的去除率是完全占四个碱基对不同绑定控制链的脚手架。一个额外的关键差异控制链是开关1的控制链内部功能化与TAMRA虽然开关2的控制链是与IBRQ功能化在其3′端。TAMRA的功能集团可能会相互作用更强烈的开关支架, 阻碍分支迁移过程和减少去除率。进一步研究了改变离子物种和浓度,23岁以及修改控制和脚手架域序列,是必要的,以确定机制对于不同的开关控制链删除。
在这两个开关,控制链删除被观察到继续以较慢的速度比控制链恢复约一个数量级为开关1和2的一个因素开关2。这些结果是令人惊讶的,因为控制链删除只涉及单个链置换过程中,而控制链恢复需要两股位移和随后的杂交。此外,作为返回的股份额的部分序列与控制链,有可能返回链,干扰恢复控制链。此外,控制链开关1(开关2)其中杂交的脚手架由14(10)bp,而删除链绑定到控制链24(22)bp,需要更长的分支迁移过程(仍然估计不到~30 ms)。23对于开关1、TAMRA功能单位仍可预期的互动因为删除链以同样的方式将与thescaffold。然而,对于开关2,删除链不应该明显的IBRQ交互功能组。因此,一个可能期望恢复率较大,为开关2,与测量的利率。尽管殖民地是
不同的长度(14元,10元的切除修复),反应率预计将保持不变,站稳脚跟超过8元,超过此点反应率
受限于杂交动力学。24、25两开关反应,为立足点的吉布斯自由能杂交足够高,离解反应可以被忽视的23对于开关,差别在移除和修复利率可能反映了序列依赖性,以及差异在当地的反应环境中自删除过程发生在三螺旋瓦而恢复过程发生在一个单一的双螺旋。进一步研究超出了这份报告范围必须阐明底层机
制影响反应速率。
开关的设计拥有关键的差异,也体现在发射光谱的来自两个开关在打开和关闭州图3所示。主要的区别开关,开关1,激子传输控制的存在或缺乏中介TAMRA染料,而对于开关2,输出染料发射控制的存在或缺乏一个冷却器。打开和关闭的对比光谱开关1演示了操作的烦恼流程之间的染料。在这个国家,发射峰观察三个染料。在关闭状态,TAMRA峰不在,厘清峰值增加,Cy5高峰减少,如预期。没有TAMRA,增加家人发射预计将自激子的能量转移从厘清效率较低,Cy5比TAMRA,基于两个光谱重叠和相对接近性。同样,Cy5下降发射预计将没有中介TAMRA。这个行为的开关2完全不同于开关1。自担心内部过程开关保持不变,在和关闭状态,几乎没有变化,TAMRA FAM公司发射峰和关闭观察之间的光谱,和只有发射从Cy5变化存在的基础上IBRQ与否的。
在比较的基础上的国家发射光谱从这两个开关,开关1显示一个总体较高传输效率。在传输效率的状态使用最小二乘法定量确定符合吗光谱得到的线性组合开关瓷砖光谱对个人染料,类似描述的过程参考10。拟合系数是用来计算整体能量转移效率对于每个开关的状态上,在支持信息描述S4。计算在国家效率表1中列出并确认开关1表现出更高的传输效率比开关2。这个主要结构之间的差别在州的两个开关是传输染料在开关1是位于一个双螺旋大约有2.38 nm之间?受体对供体。相比之下,染料在开关2不是在一个双螺旋,这样的距离,TAMRA输入和输出染料是略长约3.11海里。跟佛的r ster半径对TAMRA FAM 和对Cy5 TAMRA过程估计为4.98和4.6海里分别为26、27这增加的距离应该只产生一个~14%减少在整个传输效率。然而,改变染料取向和非辐射的损失可能足以解释差异的传输效率。
尽管总体传动效率低的开关2,的开/关比率(即。、转换效率)是显著的高(表1)。这种差异结果的差异有效地抑制Cy5发射在关闭状态,因为见过在图2中。激子转移到IBRQ冷却器近消除发射从Cy5在关闭状态的开关2。然而,在关闭状态的开关1,仍然存在显著的直接能量转移和Cy5 FAM之间。尽管他们的低频谱重叠,Cy5排放掉开关1的状态几乎等于Cy5排放上状态的开关2,如图3所示。因此,虽然总体传动效率低开关2,淬火机制的开关2,由一个大型光谱重叠荧光团和冷却器之间,靠近的对,确实提供显著更大的控制发射状态的输电线路。
分子光子电路显示信息的承诺处理在纳米器件,和烦恼是一个手段导演激子的能量流。在这项研究中,两种方法用于创建可切换的报道基于烦躁激子的传输线使用DNA自组装。开关是组装使用DNA折纸技术与功能化控制链,既可拆卸和可恢复的通过克服困难的介导链入侵。在互补开关设计,控制链要么介导烦恼过程或淬灭发射从输出染料,使它有可能切换和关闭发射状态。它发现开关设计与淬火输出发射表现出较低的整体传动效率但明显增加对比开关状态。工作后的
Vyawahare et al。10扩展这些开关的设计不再多烦恼输电线路和网络应可能的。一个开关的设计中的烦恼过程控制的同时删除或恢复多个中间染料应给出一个高效传输线与状态之间的高对比度。合成两个互补的动态输电线路使用DNA selfassembly表明它可能形成纳米级光子电路的操作可以控制通过分子的编程。这些可编程基于烦恼开关可以启用动态控制的激光optofluidic烦恼lasers28以及反应控制光化网络。29日在原理、开关报道这里可以联网来实现任意布尔功能,促进纳米级信息处理分子电路。
DNA-Controlled Excitonic Switches
Elton Graugnard,*,? Donald L. Kellis,? Hieu Bui,§Stephanie Barnes,? Wan Kuang,§Jeunghoon Lee,∥
William L. Hughes,? William B. Knowlton,?,§and Bernard Yurke?,§
?Department of Materials Science and Engineering,
?Department of Biological Sciences, §Department of Electrical and Computer
Engineering, ∥Department of Chemistry and Biochemistry, Boise State University, Boise, Idaho 83725, United States AUTHOR INFORMATION
Corresponding Author
*E-mail: EltonGraugnard@https://www.360docs.net/doc/fd264670.html,.
Notes
The authors declare no competing financial interest.
https://www.360docs.net/doc/fd264670.html,/10.1021/nl3004336 | Nano Lett. 2012, 12, 2117?2122
运动目标检测光流法
摘要 运动目标检测方法是研究如何完成对视频图像序列中感兴趣的运动目标区域的“准确定位”问题。光流场指图像灰度模式的表面运动,它可以反映视频相邻帧之间的运动信息,因而可以用于运动目标的检测。MATLAB这种语言可移植性好、可扩展性强,再加上其中有丰富的图像处理函数,所以利用MATLAB 软件来用光流法对运动目标的检测中具有很大的优势。本设计主要可以借助matlab软件编写程序,运用Horn-Schunck算法对图像前后两帧进行处理,画出图像的光流场。而图像的光流场每个像素都有一个运动矢量,因此可以反映相邻帧之间的运动,分析图像的光流场就可以得出图像中的运动目标的运动情况。 关键字:光流法;Horn-Schunck算法;matlab
目录 1光流法的设计目的 (1) 2光流法的原理 (1) 2.1光流法的介绍 (1) 2.1.1光流与光流场的概念 (1) 2.1光流法检测运动目标的原理 (2) 2.1.1光流场计算的基本原理 (2) 2.2.2基于梯度的光流场算法 (2) 2.2.3Horn-Schunck算法 (3) 2.2.4光流法检测运动目标物体的基本原理概述 (5) 3光流法的程序具体实现 (6) 3.1源代码 (6) 3.1.1求解光流场函数 (6) 3.1.2求导函数 (9) 3.1.3高斯滤波函数 (9) 3.1.4平滑性约束条件函数 (10) 3.1.5画图函数 (10) 4仿真图及分析 (12) 结论 (13) 参考文献 (14)
1 光流法的设计目的 数字图像处理,就是用数字计算机及其他有关数字技术,对图像进行处理,以达到预期的目的。随着计算机的发展,图像处理技术在许多领域得到了广泛应用,数字图像处理已成为电子信息、通信、计算机、自动化、信号处理等专业的重要课程。 数字图像处理课程设计是在学习完数字图像处理的相关理论后,进行的综合性训练课程,其目的是:使学生进一步巩固数字图像处理的基本概念、理论、分析方法和实现方法;增强学生应用Matlab编写数字图像处理的应用程序及分析、解决实际问题的能力;尝试所学的内容解决实际工程问题,培养学生的工程实践能力。 运动目标检测是数字图像处理技术的一个主要部分,近些年来,随着多媒体技术的迅猛发展和计算机性能的不断提高,动态图像处理技术日益受到人们的青睞,并且取得了丰硕的成果,广泛应用于交通管理、军事目标跟踪、生物医学等领域。 因此,基于光流法,实现运动目标的检测是本文的研究对象。结合图书馆书籍、网上资料以及现有期刊杂志,初步建立起运动目标检测的整体思路和方法。 2 光流法的原理 2.1 光流法的介绍 2.1.1 光流与光流场的概念 光流是指空间运动物体在观测成像面上的像素运动的瞬时速度,它利用图像序列像素强度数据的时域变化和相关性来确定各自像素位置的“运动”,即反映图像灰度在时间上的变化与景物中物体结构及其运动的关系。将二维图像平面特定坐标点上的灰度瞬时变化率定义为光流矢量。视觉心理学认为人与被观察物体
三种光流算法的实现源码及测试结果
基于OpenCV的三种光流算法实现源码及测试结果 本文包括三种基于OpenCV的光流算法实现源码及测试结果。具体为HS算法,LK算法,和ctfLK算法,算法的原实现作者是Eric Yuan,这里是作者的博客主页:http://eric-yuan.me。本文对这三种光流算法进行了相关调试及结果验证,供大家在自己的项目开发中参考。 1.第一种:HS光流法(作者HORN 和SCHUNCK) #include"opencv2/core/core.hpp" #include"opencv2/imgproc/imgproc.hpp" #include"opencv2/highgui/highgui.hpp" #include
光流算法
它是一种运动模式,这种运动模式指的是一个物体、表面、边缘在一个视角下由一个观察者(比如眼睛、摄像头等)和背景之间形成的明显移动。光流技术,如运动检测和图像分割,时间碰撞,运动补偿编码,三维立体视差,都是利用了这种边缘或表面运动的技术。 光流的概念:(Optical flow or optic flow)二维图像的移动相对于观察者而言是三维物体移动的在图像平面的投影。 有序的图像可以估计出二维图像的瞬时图像速率或离散图像转移。 光流算法: 它评估了两幅图像的之间的变形,它的基本假设是体素和图像像素守恒。它假设一个物体的颜色在前后两帧没有巨大而明显的变化。基于这个思路,我们可以得到图像约束方程。不同的光流算法解决了假定了不同附加条件的光流问题。 Lucas–Kanade算法: 这个算法是最常见,最流行的。它计算两帧在时间t 到t + δt之间每个每个像素点位置的移动。由于它是基于图像信号的泰勒级数,这种方法称为差分,这就是对于空间和时间坐标使用偏导数。 图像约束方程可以写为I(x,y,z,t) = I(x+ δx,y+ δy,z+ δz,t+ δt) I(x, y,z, t)为在(x,y,z)位置的体素。 我们假设移动足够的小,那么对图像约束方程使用泰勒公式,我们可以
得到: H.O.T. 指更高阶,在移动足够小的情况下可以忽略。从这个方程中我们可以得到: 或者 我们得到: V x,V y,V z分别是I(x,y,z,t)的光流向量中x,y,z的组成。, , 和则是图像在(x,y,z,t)这一点向相应方向的差分。 所以 I x V x + I y V y + I z V z= ?I t。 写做: 这个方程有三个未知量,尚不能被解决,这也就是所谓光流算法的光圈问题。那么要找到光流向量则需要另一套解决的方案。而Lucas-Kanade算法是一个非迭代的算法: 假设流(Vx,Vy,Vz)在一个大小为m*m*m(m>1)的小窗中是一个常数,那么从像素 1...n, n = m3中可以得到下列一组方程: 三个未知数但是有多于三个的方程,这个方程组自然是个超定方程,也就是说方程组内有冗余,方程组可以表示为:
LK光流算法总结-精选.doc
运动目标检测之Lucas-Kanade 光流算法读书笔记 视觉是人类感知自身周围复杂环境最直接有效的手段之一,而在现实生活中大量有意义的视觉信息都包含在运动中,人眼对运动的物体和目标也更敏感,能够快速的发现运动目标。随着计算机技术、通信技术、图像处理技术的不断发展,计算机视觉己成为目前的热 点研究问题之一。而运动目标检测是计算机视觉研究的核心课题之一,融合了图像处理、模式识别、人工智能、自动控制、计算机等众多领域的先进技术,在军事制导、视觉导航、视频监控、智能交通、医疗诊断、工业产品检测等方面有着重要的实用价值和广阔的发展 前景。 一目标检测 运动目标检测运动目标检测是指从序列图像中将运动的前景目标从背景图像中提取出 来。目前,已有的运动目标检测方法按照算法的基本原理可以分为三类:背景差分法,帧间差 分法和光流法。 1 背景差分法 背景差分法又称背景减除法,背景差分法的原理是将当前帧与背景图像进行差分来得到 运动目标区域,但是需要构建一幅背景图像,这幅背景图像必须不含运动目标,并且应该能不断的更新来适应当前背景的变化,构建背景图像的方法有很多,比较常用的有基于单个高 斯模型的背景构建,基于混合高斯模型的背景构建,基于中值滤波器的背景构造,基于卡尔曼滤波器的背景构造,基于核函数密度估计的背景模型构造。 缺点:因为要求背景是静止的,所以背景的变化,场景中有很多干扰,比如场景中 有树枝和叶子在风中晃动、水面的波动等等,还有照明的变化和天气的变化等都可能影响检 测的结果 2 帧间差分法 帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的 方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。当监控场景中出现异常 物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,
湖南大学高等分析化学思考题答案
高等分析化学思考题(化学专业本科)2 第一章分析化学相关文献 基本概念:一次文献、二次文献、技术标准、通讯作者、ISSN、DOI (1)为什么要费时费力地去了解文献的相关知识? (2)SCI和SciFinder是一回事吗?为什么? (3)说明如何获取一篇专利的原文。 (4)在尿样检验中,有什么手段可以降低假阳性出现的几率? 1.原始的创作,如期刊论文、技术报告、专利说明书??? 2.将一级文献经过加工整理、简化组织成为系统的文献,便于查找一级文献, 如书目、索引和文摘。 3.对产品的质量、规格及检验方法等方面所做的技术规范。如化工产品的分析 检验方法的各种标准。 4.课题的总负责人,承担课题的经费,设计,文章的书写和把关。通讯作者也 是文章和研究材料的联系人,担负着文章可靠性的责任。 5.ISSN国际标准连续出版物编号,其目的是使世界上每一种不同题名、不同版 本的连续出版物都有一个国际性的唯一代码标识 6.数字对象唯一标识符,它是一套识别数字资源的机制,涵括的对象有视频、 报告或书籍等等。 1.了解文献,从而快速查找有价值的文献;方便自己写文献。 2.SCI是科学引文索引,内容涵盖所有自然科学,SciFinder Scholar是美国化学 学会旗下的化学文摘服务社所出版的在线版数据库学术版,只有化学的内容。 3.从各国专利管理机构获取;从各商业性数据库获取。 4.控制时间,存放时间不能太长,从收集完毕到检测完毕不能超过2小时;不 能掺杂质;要用干净的容器装;进行复检,比如镜检。 第二章分析化学的一些发展趋势 2.1单分子分析 基本概念:消失波、TIRFM、TLM、AFM 1.标准波在全内反射界面呈指数衰减由光密渗入光疏介质而形成消逝波。 2.全内反射荧光显微镜,利用光线全反射后在介质另一面产生衰逝波的特性, 激发荧光分子以观察荧光标定样品的极薄区域,紫外区观测的动态范围通常在200 nm以下。 3.热透显微镜 热透显微镜采用波长不同的两种激光器。在激光束焦点附近如果有对光有吸收的物质存在就会吸收光而发热,激光焦点中心部位发热多而边缘发热少,周围的水会因为折射率不同起到凹透镜的所用,当另一束激光通过时,会因为凹透镜的作用而发散,据此进行物质探测。 4. 原子力显微镜,利用微小探针与待测物之间交互作用力,将激光束照射到微 悬臂上,再进行反射及反馈来呈现待测物的表面形貌和物理特性。 (1)为什么要发展单分子分析方法?并举例具体说明。 探测并识别单个分子,揭示基团平均所覆盖的分子特性,实时监测分子运动,具
LK光流算法总结
运动目标检测之Lucas-Kanade光流算法读书笔记 视觉是人类感知自身周围复杂环境最直接有效的手段之一,而在现实生活中大量有意义的视觉信息都包含在运动中,人眼对运动的物体和目标也更敏感,能够快速的发现运动目标。随着计算机技术、通信技术、图像处理技术的不断发展,计算机视觉己成为目前的热点研究问题之一。而运动目标检测是计算机视觉研究的核心课题之一,融合了图像处理、模式识别、人工智能、自动控制、计算机等众多领域的先进技术,在军事制导、视觉导航、视频监控、智能交通、医疗诊断、工业产品检测等方面有着重要的实用价值和广阔的发展前景。 一目标检测 运动目标检测运动目标检测是指从序列图像中将运动的前景目标从背景图像中提取出来。目前,已有的运动目标检测方法按照算法的基本原理可以分为三类:背景差分法,帧间差分法和光流法。 1背景差分法 背景差分法又称背景减除法,背景差分法的原理是将当前帧与背景图像进行差分来得到运动目标区域,但是需要构建一幅背景图像,这幅背景图像必须不含运动目标,并且应该能不断的更新来适应当前背景的变化,构建背景图像的方法有很多,比较常用的有基于单个高斯模型的背景构建,基于混合高斯模型的背景构建,基于中值滤波器的背景构造,基于卡尔曼滤波器的背景构造,基于核函数密度估计的背景模型构造。 缺点:因为要求背景是静止的,所以背景的变化,场景中有很多干扰,比如场景中有树枝和叶子在风中晃动、水面的波动等等,还有照明的变化和天气的变化等都可能影响检测的结果 2帧间差分法 帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。当监控场景中出现异常物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,
Farneback光流场算法数学推导
3.2.1 Farneback 算法原理剖析 该算法的总体思想就是首先通过多项式展开变换逼近两帧图像中的每个像素,然后通过观察一个多项式如何在平移下进行精确变换,最终从多项式展开系数中推导得到位移场。 1.多项式展开 多项式展开的思想[5]是将每个像素点的邻域近似表示为多项式,我们可以构造 f x ~x T Ax +b T x +c (4-1) 其中x 是该像素点的位置坐标 m ,n ,A 是一个对称矩阵 a 1a 2 a 2a 1 , b 是一个二维向量 b 1,b 2 , c 是一个标量,系数要根据加权最小二乘法对相邻信号值进行估计。 将f x 展开 f x ~c +b 1m +b 2+a 1m 2+a 2m 2+2a 2mn (4-2) 这里实际上将二维信号空间转换成了以 1,a ,b ,a 2,b 2,ab 作为基函数的六维信号空间,我们表示图像就需要一个六维向量。在编程中,为了简化计算,我们舍弃了其中的常数项,六维空间便转化为五维空间。 2.位移估计 由于多项式展开的结果是每个邻域近似表示为多项式,因此我们首先分析多项式经过理想平移的情况。 初始图像信号 f 1 x =x T A 1x +b 1T x +c 1 (4-3) 经过全局位移d ,构建得到新的信号f 2 f 2 x =f 1 x ?d (4-4) = x ?d T A 1(x ?d )+b 1T (x ?d )+c 1 =x T A 1x + b 1?2A 1d T x +d T A 1d ?b 1T d +c 1 将多项式中的系数等效 A 2=A 1 (4-5) b 2=b 1?2A 1d (4-6) c 2=d T A 1d ?b 1T d +c 1 (4-7) 得 f 2(x )=x T A 2x +b 2T x +c 2 (4-8) 通过方程(4-6),我们可以求解得到d 2A 1d =?(b 2?b 1) (4-9) d =?12 A 1?1 (b 2?b 1) (4-10) 3.结合实际考虑
光流控芯片及其应用综述
光流控芯片及其应用综述
前言 随着人类文明的不断进步,人们对光学的研究也逐渐深入,尤其是到了21世纪,光不仅在我们的生活和生产中扮演着越来越重要的角色,而且它也成为了很多科研工作者的重要研究方向。随着科学技术的发展,器件变得越来越微型化的,为了降低成本,减少人力投入,削减废料产生,提高通量和自动化程度,提高实验精准度和可重复性,现代科学研究常常需要将各种科学实验集成在一块小芯片上,即“芯片上的实验室”。光学器件也不例外,随着现代光学技术的蓬勃发展,光学器件的微型化、可调化和集成化已成为了光学技术的重要研究方向,因此科学家们创造了——光流控芯片。顾名思义,光流控芯片是指将对光的产生、控制以及处理光信号的功能集成在一片芯片平台上的装置。它是以光流控学位理论基础并结合微加工技术的产物。 光流控芯片的研究目前还刚刚开始,但已爆发处其巨大的潜力,目前在细胞生物学、分析化学、化学合成、显微技术、显像技术和激光技术的等诸多领域都得到了很好的应用。相信光流控芯片在未来几年将会得到快速的发展,其应用范围也大大扩展,并逐步走出实验室实现商业化。
第一章光流控学 在具体谈光流控芯片之前,我们不得不先谈一谈光流控学(微流控光学Optofluidics),它存在的意义是为在芯片平台上产生、控制以及处理光信号提供了一种独特的解决方案。不同于20世纪60年代的射流技术以宏观机械控制为目标,微流控技术意图实现微量化学或生物样品的合成与分析,而微流控光学技术则是在微观尺度上通过操控流体达到调节系统的光学或光子电子学特性的目的。微流控光学研究微流控系统中的光学现象,探索微流控系统与光子的相互作用规律,目的是开发具有结构重组合可调能力的微流控光学器件与系统。微流控光学是将微流控学与光学技术融合在一起的为传统光学器件的微 型化、阵列化、低成本化及高精度控制提供了可能。 而微流控光学又是由微流控学发展而来,它是将微流控技术与微型光学器件交叉集成的一门新兴学科。微流控学是微流控光学的基础,它的定义是:【1】在为尺度与介观尺度(纳升级)上研究流体行为,以及相关的设计与应用的,由物理、化学、微加工与生物技术等学科组成的领域;【2】在微米级、纳米级结构中操控纳升至皮升体积流体的技术与科学。微流控技术是微全分析系统和芯片实验室的支撑技术。 而微型光学器件有很多,像微型传感器、微型棱镜、波导管、光
一种视频微表情检测的改进光流算法
2018年6月图 学 学 报 June2018第39卷第3期JOURNAL OF GRAPHICS V ol.39No.3一种视频微表情检测的改进光流算法 李秋宇1,张玉明2,杨福猛3,詹曙1 (1. 合肥工业大学计算机与信息学院,安徽合肥 230009; 2. 芜湖职业技术学院电气工程学院,安徽芜湖 241000; 3. 安徽信息工程学院,安徽芜湖 241000) 摘要:微表情是人们在试图隐藏自己真实情感时表现出的不受自主神经控制、持续时间短暂,强度十分微弱的面部表情。由于微表情与谎言识别有着密切的联系,其公共安全、侦查讯问、临床医学等领域有很大的应用前景。针对人为识别微表情十分困难的问题,提出一种基于Horn-Schunck (HS)光流法改进并应用于微表情自动检测的方法。使用预条件Gauss-Seidel迭代方法改进了HS光流法,加快了收敛速度。通过在自发微表情数据库CASME中进行实验,该验证方法在微表情检测中有很好的效果。 关键词:微表情检测;光流法;预条件迭代 中图分类号:TP 391 DOI:10.11996/JG.j.2095-302X.2018030448 文献标识码:A 文章编号:2095-302X(2018)03-0448-05 An Improved Optical Flow Algorithm for Micro Expression Detection in the Video Sequence LI Qiuyu1, ZHANG Yuming2, YANG Fumeng3, ZHAN Shu1 (1. School of Computer and Information, Hefei University of Technology, Hefei Anhui 230009, China; 2. School of Electrical Engineering, Wuhu Institute of Technology, Wuhu Anhui 241000, China; 3. Anhui Institute of Information Technology, Wuhu Anhui 241000, China) Abstract: Micro-expression is a kind of short-duration subtle expression which is not controlled by the autonomic nervous system. Micro-expression appears when a person is attempting to conceal his true emotion. Micro-expression detection boasts great application prospects in many fields, such as public security, investigation and interrogation as well as clinical medicine due to its close relationship with lie detection. Automatic detection of micro-expressions has come to the fore in research, because it is of great difficulty to artificially identify micro-expression . This paper proposes an improved algorithm based on the Horn-Schunck (HS) optical flow for automatic micro-expression detection. In this study, the pre-conditioned Gauss-Seidel iterative method is employed to improve the HS optical flow method, which accelerates the convergence rate. Experiments in the spontaneous micro-expression database CASME show that the propounded method exerts an excellent effect on the detection of micro-expression. Keywords: micro-expression detection; optical flow; preconditioned iteration 第一作者:李秋宇(1993-),男,安徽霍邱人,硕士研究生。主要研究方向为计算机视觉、深度学习。E-mail:lqy@https://www.360docs.net/doc/fd264670.html, 通信作者:詹曙(1968-),男,安徽合肥人,教授,博士。主要研究方向为三维人脸图像分析和识别、医学影像分析和医学成像系统。 E-mail:shu_zhan@https://www.360docs.net/doc/fd264670.html, 万方数据
光流法运动目标跟踪论文
研究生课程论文 《光流法运动目标跟踪》 课程名称s 姓名 学号 专业 任课教师 教师评阅意见: 论文成绩评阅日期 课程论文提交时间:年月日
摘要本文实现了对运动目标的跟踪检测,重点研究金字塔Lucas-Kanade算法,在研究基于特征点的目标跟踪的一般方法,即采用改进的Harris角点提取点的方法。实验结果表明先采用Shi-Tomasi算法比Harris算法提取角点效果更好,之后用金字塔光流进行跟踪。 关键词运动目标跟踪Lucas-Kanade Shi-Tomasi 改进Harris 1.引言 近些年,模式识别领域的图像处理已经成为一个支柱,其中,动态目标的识别跟踪已经被研究者应用到工程上,而运动目标跟踪算法的优劣直接影响着运动目标跟踪的稳定性和精确性。本文主要是运动光流法等算法对运动目标进行跟踪。目标特征点的跟踪是计算机视觉中的一个基本而极具挑战性的研究课题,该课题在人机互动(HCI),目标识别,目标运动等领域有着非常重要的应用。虽然对运动目标跟踪算法能够完成对运动目标的可靠跟踪,大多数都存在处理数据量大,运算复杂等问题。因此,研究具有高精度且运算简单的目标检测与跟踪算法是图形跟踪迫切需要解决的问题,目前基于特征和光流的图像跟踪方法受到了极大的关注。 2.运动目标检测算法 运动目标检测技术是目标自动检测、识别与跟踪的基础,也是实现进一步处理视频编码、目标跟踪、目标分类及行为理解等的关键技术。基于视频或序列图像的分析一般可分为四个步骤:(1)运动目标的检测与提取,(2)运动目标的分类,(3)运动目标的跟踪,(4)运动目标的行为理解与分析,如图1所示。 图像序列运动检测目标分类目标跟踪行为理解 图1 分析过程 在计算机视觉处理中,运动目标检测技术处于中层处理级别,它是指在一个视频或者图像中,对需要研究的并且是处于运动状态的目标和背景进行分离,对于行为理解,行为分析等其他技术的研究,运动目标检测也是一种有效的方法。 目标检测要依据运动目标的主要特性,例如时间特性、边缘形状特性、颜色灰度特性、矢量特性等等。时间特性、区域作为视频序列时间差分和图像分割的基础,是运动目标最基本的特性。目标运动时在形状、大小、刚度等方面的差异称为形态特征,利用形态特征对运动目标检测,难点是对小目标的检测。 3.光流法 1950年,Gibuson首先提出了光流的概念,所谓光流就是指图像表现运动的速度。物体在运动的时候之所以能被人眼发现,就是因为当物理运动时,会在人的视网膜上形成一系列的连续变化的图像,这些变化信息在不同时间,不断的流过眼睛视网膜,就好像一种光流过一
TheoreticalMicrofluidics理论微流控技术-南开大学图书馆
《Theoretical Microfluidics》(理论微流控技术)简介 一、出版情况 《理论微流控技术》(Theoretical Microfluidics)一书由Oxford University Press Inc., New York出版公司在美国出版,是“牛津物理学大师系列”(Oxford Master Series in Physics)丛书共18本中的第18本,全书346页,南开大学图书馆馆藏版本为2008年第一版。本书作者Henrik Bruus教授任职于丹麦技术大学微纳技术系,地址:Department of Micro- and Nanotechnology, Technical University of Denmark, DTU Nanotech Bldg. 345 East, DK-2800 Kongens Lyngby, Denmark;主页:www.mic.dtu.dk/bruus;E-mail: bruus@nanotech.dtu.dk。 二、内容简介 微流控技术是一个迅速扩展的新兴学科,其研究对象为微型化体系中的流体和溶液,即所谓的“芯片实验室”系统。它在化工、药学、生物技术和医学领域都有应用。伴随着芯片实验室的研究日趋复杂化,对其恰当的理论解释也变得越来越重要。 本书的基本理念是提供一个关于微流控技术理论框架的自明性公式,与此同时给出物理学动因和芯片实验室技术的实例,用以弥合物理学理论教材与微流控技术这一多学科交叉领域的实际研究之间的距离。本书前三章介绍微流控技术,关于质量、动量和能量的控制性问题,以及基本的流体溶液,之后的十四章针对流体的阻力-顺应性,扩散-弥散,时间依赖性,时变流,毛细作用,电磁流体力学,热传递,两相流,复杂流态,声流控,以及光流控和纳米流控的新领域。全书中展示了大量具有解析解法的简化模型,为学生提供了数量级的深入物理学理解,以及各种精选的微流控现象与装置。 本书由一系列讲座笔记整理而成,并且经过了数年实践教学的验证,是一本针对高年级本科生或一年级研究生的、包含大量教育学练习的课本,也非常适合自学。 三、目录 符号列表 1 微流控技术中的基础概念 2 主导性公式 3 基本流体溶液 4 流体的阻力和顺应性 5 扩散 6 时变流 7 毛细管效应 8 电流体力学 9 电渗透 10 双向电泳 11 磁泳 12 热传递 13 两相流 14 复杂流态 15 声流控 16 光流控
光流法
光流的概念是Gibson在1950年首先提出来的。它是空间运动物体在观察成像平面上的像素运动的瞬时速度,是利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的一种方法。一般而言,光流是由于场景中前景目标本身的移动、相机的运动,或者两者的共同运动所产生的。其计算方法可以分为三类:(1)基于区域或者基于特征的匹配方法; (2)基于频域的方法; (3)基于梯度的方法; 简单来说,光流是空间运动物体在观测成像平面上的像素运动的“瞬时速度”。光流的研究是利用图像序列中的像素强度数据的时域变化和相关性来确定各自像素位置的“运动”。研究光流场的目的就是为了从图片序列中近似得到不能直接得到的运动场。 光流法的前提假设: (1)相邻帧之间的亮度恒定; (2)相邻视频帧的取帧时间连续,或者,相邻帧之间物体的运动比较“微小”;(3)保持空间一致性;即,同一子图像的像素点具有相同的运动 这里有两个概念需要解释: 运动场,其实就是物体在三维真实世界中的运动; 光流场,是运动场在二维图像平面上的投影。
如上图所示,H中的像素点(x,y)在I中的移动到了(x+u,y+v)的位置,偏移量为(u,v)。 光流法用于目标检测的原理:给图像中的每个像素点赋予一个速度矢量,这样就形成了一个运动矢量场。在某一特定时刻,图像上的点与三维物体上的点一一对应,这种对应关系可以通过投影来计算得到。根据各个像素点的速度矢量特征,可以对图像进行动态分析。如果图像中没有运动目标,则光流矢量在整个图像区域是连续变化的。当图像中有运动物体时,目标和背景存在着相对运动。运动物体所形成的速度矢量必然和背景的速度矢量有所不同,如
LK光流算法
光流的概念是Gibson于1950年首先提出的。所谓光流是指图像中模式运动的速 。1981年,Horn等人在相邻图像间的时间间隔很小,并且图像灰度变化也很小的 提下,推导出灰度图像光流场计算的基本等式,这是经典光流方法[18,24]。 光流的算法多种多样,其用于目标跟踪常用的算法有:检测和跟踪特征点[25]、跟 好的特征点[26]、金字塔图像的Lucas Kanade特征点跟踪算法(因为其跟踪过程是迭 的光流法计算过程,因此,为了更好的体现光流的作用,本文将其简称为:Lucas nad光流法)[27]。在这三种光流跟踪方法中,跟踪性能最优的是Lucas Kanade光流 –26–第四章目标跟踪 法,由于该算法仅跟踪少量的特征点、迭代法收敛速度也很快而且算法的计算量不大, 已被广泛的应用于运动车辆跟踪和人脸特征点跟踪[47,48];下面介绍文献[27],并对其 进行相关实验。 §4.3.1问题提出 用I和J来代表两个灰度图像。那么I(x)=I(x,y)和J(x)=J(x,y)代表了这两个灰度图 像在点X=[x,y]T的灰度值,x和y是图像的点X坐标。称图像I为第一幅图像,称J为 第二幅图像。从实际的图像来说,I和J是两个离散的函数,并且左上角的像素点坐标 是[0,0]T。用nx和ny表示图像的宽度和高度,右下端图像的坐标是[nx?1,ny?1]T。 考虑第一幅图像I(X)=I(x,y)上的一点,跟踪的目的就是在第二幅图像J(X)= J(x,y)上找到与之相对应的一点,d=[d x ,d y ] T 是在点X处图像的速度,即点X处图像的 光流。令ωx和ωy表示两个整数,假定图像速度d是使得下面的残差函数ε最小的函数:ε(d)=ε(dx,dy)= ux+ωx x=ux?ωx uy+ωy y=uy?ωy (I(x,y)?J(x+dx,y+dy)) 2 (4-3-5) 根据上面的定义,相似度的函数被在(2ωx+1,2ωy+1)的区域内定义。这个区域也 称之为积分窗口。典型的ωx、ωy是2、3、4、5、6、7个像素。 §4.3.2跟踪算法描述 基于特征点的跟踪的两个关键问题是准确度和鲁棒性。准确度是从直觉上来说, 为了不抹去图像中的细节,需要小的积分窗口。鲁棒性因素需要考虑光照变化,图像 运动时对尺寸变化的敏感性。特别的,为了了解大矢量运动的问题需要一个大的积分 窗口。实际上,仅仅考虑等式(4-3-5),理想的情况是dx<ωx,dy<ωy。这样我们就必 须兼顾准确度和鲁棒性来选择积分窗口。为了更好的解决这个问题,采用了基于金字 塔图像的光流跟踪方法。这个方法对局部跟踪的准确性提出了一个很好的解决方案。 一、金字塔图像表示 描述一个nx×ny的图像I,令I0=I表示第0层图像(原始图像),那么金字塔图
全局运动多分辨率光流估计算法的改进与实现_韩军
文章编号:1673-9965(2011)02-115-05 全局运动多分辨率光流估计算法的改进与实现* 韩军,张东 (西安工业大学光电工程学院,西安710032) 摘要:为了提高低分辨率图像之间的位移估计精度,在传统光流算法的基础上,提出了全局运动的多分辨率光流估计算法.实验结果表明:该算法能够快速实现小位移和准确的实现大位移的运动估计,通过对互有亚像素位移的多帧低分辨率图像对比相位相关法进行运动估计,改进的多分辨率光流估计算法实现的高精度亚像素位移误差精度为0.05pi. 关键词:光流估计算法;多分辨率;亚像素估计;相位相关法 中图号:T P391.4文献标志码:A 图像超分辨率重构技术是提高现有光电观瞄系统的探测距离和分辨率的重要方法,近年来是研究的热门课题[1].为了重建高分辨率图像,首先必须确定所有低分辨率图像间的运动信息,然后将它们配准到同一个参考帧上.在很多其他应用中,这些运动参数是事先不可知的,因此运动估计是超分辨率重建算法中非常关键的步骤,而且估计的准确性比其密集性更重要,如果估计精度达不到亚像素级,将会极大地影响重建图像的质量[2]. 现有运动补偿和运动估计的算法很多,主要如基于插值的算法、基于抛物面预测算法、基于频率域方法的相位相关法等[3-4].通过插值算法达到亚像素的精度是运用最为广泛的方法,但其随着精度的提高,运算的复杂性大大提高.另一类亚像素运动估计方法是基于抛物面预测的亚像素运动估计算法,这类方法虽然所需时间少,但是由于最佳亚像素点周围的实际函数并不是和预测的函数完全一致,会导致最佳运动矢量与实际选取的运动矢量之间的误差. 光流估计算法是运动估计中的重要算法之一[5].光流是空间运动物体在观测成像面上的象素运动的瞬时速度;光流场是指图像灰度模式的表面运动.光流的研究是利用图像序列中的像素强度数据的时域变化和相关性来确定各自像素位置的运动.研究光流场的目的就是为了从序列图像中近似计算出不能直接得到的运动场[7-8].文中改进了基于全局运动多分辨率的光流估计方法,将待估计图像降采样形成分辨率逐步降低的图像集合,对其由低到高逐级进行光流法运动估计.并通过实验证明了多分辨率的光流估计方法提高了估计的精确性. 1传统的光流估算方法 光流场的计算最初是由H orn和Schunck提出[7].如果t时刻图像的点(x,y)处灰度值为I(x, y,t),在时刻t+$t时,这一点运动到((x+$x,y+ $y,t+$t),对应的灰度值为I(x+$x,y+$y,t+ $t),假定它与I(x,y,t)相等,即 I(x+$x,y+$y,t+$t)=I(x,y,t)(1) 利用泰勒公式对其展开,忽略二阶及其以上的项可得到 5I 5x $x $t+ 5I 5y $y $t+ 5I 5t=0(2)令u,v分别为该点光流矢量沿x和y方向的两个分量,且有 u=d x d t ,v=d y d t 则可得到基本光流约束方程 I x u+I y v+I t=0(3) 第31卷第2期2011年04月 西安工业大学学报 Jour nal of X i.an T echno log ical U niversity V ol.31N o.2 A pr.2011 *收稿日期:2010-11-23 作者简介:韩军(1966-),男,西安工业大学教授,主要研究方向为光电测试技术、光学薄膜.E-mail:hanjun512@https://www.360docs.net/doc/fd264670.html,.
采用光流估计的数字相机自动对焦算法
采用光流估计的数字相机自动对焦算法 郭惠楠1,曹剑中1,周祚峰1,董小坤1,刘庆,马楠2 (1.中国科学院西安光学精密机械研究所,陕西西安710119; 2.空军工程大学理学院,陕西西安710051) 摘要:自动对焦技术对于数字相机至关重要,它是获取清晰图像的重要手段。针对复杂环境下多目标场景图像,提出了一种基于光流场估计的自动对焦算法。通过计算输入图像序列的光流场,对场景中的运动目标进行检测,根据目标运动属性准确判断出感兴趣目标。改进了Brenner 清晰度评价方法,利用目标的二维边缘梯度信息建立评价函数,并且通过非线性增益提高评价函数的灵敏度,减小了噪声对评价值的影响。实验证明,该算法能够在主辅目标景深比达50倍的情况下分辨出感兴趣主目标,并在方差为0.02的随机噪声干扰下能有效地评价图像的清晰度;此算法将Brenner 等评价函数的峰值稳定余量提高了1至4倍,对于不同图像具有良好的鲁棒性,易于硬件实现。关键词:光学工程;自动对焦;光流;清晰度评价;数字相机 中图分类号:TP391.9文献标志码:A 文章编号:1007-2276(2013)12-3417-06Auto 鄄focus algorithm of digital camera based on optical flow estimation Guo Huinan 1,Cao Jianzhong 1,Zhou Zuofeng 1,Dong Xiaokun 1,Liu Qing 1,Ma Nan 2 (Xi ′an Institute of Optics and Precision Mechanics,Chinese Academy of Sciences,Xi ′an 710119,China; 2.College of Science,Air Force University of Engineering,Xi ′an 710051,China) Abstract:Auto 鄄Focus technique is a main approach to hunt clear images which plays an important role in digital camera application.According to several unknown target under complicated condition,a novel auto 鄄focus algorithm was proposed based on optical flow estimation.By calculating the optical flow of each input frame,the moving targets in scene image were tested as well as according to the moving characteristic,the interested real target was judged.Brenner sharpness evaluation method was improved.Meanwhile the evaluation function was established using two dimensions edge 鄄gradient information.The response sensitivity of evaluation function was also increased via nonlinear 鄄gain coefficient the impact of noise on evaluation value was decreased.Experimental results show that the proposed method can distinguish the interested main target in 50times depths of field of different targets and evaluate the definition of varied images with random noise in 0.02variance value effectively.And it is of a good ability of robustness for different images,Brenner function improves the peak stability margin 1to 4收稿日期:2013-04-12;修订日期:2013-05-20 基金项目:国家自然科学基金(61201376) 作者简介:郭惠楠(1985-),男,博士生,主要从事图像与视频信息处理方面的研究。Email:s09068@https://www.360docs.net/doc/fd264670.html, 导师简介:曹剑中(1969-),男,研究员,博士生导师,主要从事航空相机成像系统方面的研究。Email:cjz@https://www.360docs.net/doc/fd264670.html, 第42卷第12期 红外与激光工程2013年12月Vol.42No.12Infrared and Laser Engineering Dec .2013
帧差法、光流法、背景减除法
帧差法、光流法、背景减除法 运动目标检测是指在序列图像中检测出变化区域并将运动目标从背景图像中提取出来。通常情况下,目标分类、跟踪和行为理解等后处理过程仅仅考虑图像中对应于运动目标的像素区域,因此运动目标的正确检测与分割对于后期处理非常重要然而,由于场景的动态变化,如天气、光照、阴影及杂乱背景干扰等的影响,使得运动目标的检测与分割变得相当困难。根据摄像头是否保持静止,运动检测分为静态背景和运运动目标检测是指在序列图像中检测出变化区域并将运动目标从背景图像中提取出来。通常情况下,目标分类、跟踪和行为理解等后处理过程仅仅考虑图像中对应于运动目标的像素区域,因此运动目标的正确检测与分割对于后期处理非常重要然而,由于场景的动态变化,如天气、光照、阴影及杂乱背景干扰等的影响,使得运动目标的检测与分割变得相当困难。根据摄像头是否保持静止,运动检测分为静态背景和运动背景两类。大多数视频监控系统是摄像头固定的,因此静态背景下运动目标检测算法受到广泛关注,常用的方法有帧差法、光流法、背景减除法等。 (l)帧差法 帧差法是最为常用的运动目标检测和分割方法之一,基本原理就是在图像序列相邻两帧或三帧间采用基于像素的时间差分通过闭值化来提取出图像中的运动区域。首先,将相邻帧图像对应像素值相减得到差分图像,然后对差分图像二值化,在环境亮度变化不大的情况下,如果对应像素值变化小于事先确定的阂值时,可以认为此处为背景像素:如果图像区域的像素值变化很大,可以认为这是由于图像中运动物体引起的,将这些区域标记为前景像素,利用标记的像素区域可以确定运动目标在图像中的位置。由于相邻两帧间的时间间隔非常短,用前一帧图像作为当前帧的背景模型具有较好的实时性,其背景不积累,且更新速度快、算法简单、计算量小。算法的不足在于对环境噪声较为敏感,闽值的选择相当关键,选择过低不足以抑制图像中的噪声,过高则忽略了图像中有用的变化。对于比较大的、颜色一致的运动目标,有可能在目标内部产生空洞,无法完整地提取运动目标。 (2)光流法 光流法的主要任务就是计算光流场,即在适当的平滑性约束条件下,根据图像序列的时空梯度估算运动场,通过分析运动场的变化对运动目标和场景进行检测与分割。通常有基于全局光流场和特征点光流场两种方法。最经典的全局光流场计算方法是L-K(Lueas&Kanada)法和H-S(Hom&Schunck)法,得到全局光流场后通过比较运动目标与背景之间的运动差异对运动目标进行光流分割,缺点是计算量大。特征点光流法通过特征匹配求特征点处的流速,具有计算量小、快速灵活的特点,但稀疏的光流场很难精确地提取运动目标的形状。总的来说,光流法不需要预先知道场景的任何信息,就能够检测到运动对象,可处理背景运动的情况,但噪声、多光源、阴影和遮挡等因素会对光流场分布的计算结果造成严重影响;而且光流法计算复杂,很难实现实时处理。 (3)背景减除法 背景减除法是一种有效的运动对象检测算法,基本思想是利用背景的参数模型来近似背景图像的像素值,将当前帧与背景图像进行差分比较实现对运动区域的检测,其中区别较大的像素区域被认为是运动区域,而区别较小的像素区域被认为是背景区域。背景减除法必须要有背景图像,并且背景图像必须是随着光照或外部环境的变化而实时更新的,因此背景减除法的关键是背景建模及其更新。针对如何建立对于不同场景的动态变化均具有自适应性的背景模型,减少动态场景变化对运动分割的影响,研究人员已提出了许多背景建模算法,但总的来讲可以概括为非回归递推和回归递推两类。非回归背景建模算法是动态的利用从某一时刻开始到当前一段时间内存储的新近观测数据作为样本来进行背景建模。非回归背景建模方法有最简单的帧间差分、中值滤波方法、Toyama等利用缓存的样本像素来估计背景模型