基于状态观测器的新分数阶超混沌系统广义同步
收稿日期:2010-06-29
基金项目:国家自然科学基金资助项目(60804006)?作者简介:孙 宁(1981-),女,吉林长春人,东北大学博士研究生?
第32卷第2期2011年2月
东北大学学报(自然科学版)JournalofNortheasternUniversity(NaturalScience)
Vol畅32,No.2Feb.2011
基于状态观测器的新分数阶
超混沌系统广义同步
孙 宁,王智良
(东北大学信息科学与工程学院,辽宁沈阳 110819)
摘 要:研究一个新分数阶超混沌系统的非奇异矩阵系数的广义同步问题?根据实际问题需要,这个新的分数阶超混沌系统采用Caputo分数阶导数的定义?针对这个系统,设计了一个基于极点配置理论和分数阶线性系统稳定理论的状态观测器?通过配置误差系统系数矩阵极点位置,设计得到反馈矩阵L,使得观测器状态的线性非奇异变换与该分数阶超混沌系统的状态实现广义同步,从而也使这个观测器可以实现包括完全同步、反同步和投影同步等经典的同步形式?数值仿真验证了该方法的有效性?关 键 词:分数阶;超混沌系统;广义同步;极点配置;状态观测器
中图分类号:TG335.58 文献标志码:A 文章编号:1005-3026(2011)02-0165-04
GeneralizedSynchronizationofaNewFractional-OrderHyperchaoticSystemBasedonStateObserver
SUNNing,WANGZhi-liang
(SchoolofInformationScience&Engineering,NortheasternUniversity,Shenyang110819,China.Correspondingauthor:SUNNing,E-mail:qunrqunr@126.com)
Abstract:Studiesthegeneralizedsynchronizationofanewfractional-orderhyperchaoticsystemwhichisdefinedbytheCaputo摧sfractionalderivativeaccordingtopracticalrequirements.Forthissystem,astateobserverisdesignedonthebasesofpoleassignmentandthestabilitytheoryofalinearfractional-ordersystem.Anappropriatefeedbackgainmatrixofthestate-observercanbeobtainedthroughthepoleassignmentsoastorealizethegeneralizedsynchronizationbetweenthearbitrarylinearnonsingulartransformationoftheobserver’sstateandthestateofthefractional-orderhyperchaoticsystem,thustheconventionalmodesofsynchronization,e.g.,thecompletesynchronization,anti-synchronizationandprojectivesynchronizationareallavailable.Numericalsimulationverifiedtheeffectivenessofthemethodproposed.
Keywords:fractional-order;hyperchaoticsystem;generalizedsynchronization;poleassignment;stateobserver
超混沌系统出现在四维及更高维的非线性系统中,具有比三维混沌系统更为复杂的动力学行为,因为它具有两个或两个以上正的Lyapunov指数,相轨迹在更多方向上分离?
由于混沌系统的初值敏感性,使得其长期行为不可预测,因而控制混沌成为混沌应用的关键
技术?自1990年,Pecora和Carroll[1]
发现两个混沌系统可以同步并且在实际电路中实现以来,混沌同步在保密通信领域巨大的潜在应用前景,使
其近年来得到了广泛的关注和研究?相同步、滞后
同步、反同步、预期同步、投影同步、广义同步等多种同步现象不断被发现[2-4],其中广义同步是1995年Rulkov提出的[5]?所谓广义同步,是指响应系统的状态变量与驱动系统的状态变量的函数同步,完全同步、反同步、投影同步均可以看做是广义同步的特例?
另一方面,在由分数阶微分方程描述的非线性系统中也发现了混沌现象,如分数阶Chen系
统、分数阶超混沌R迸ssler系统等[6-7],具有300多年研究历史的分数阶微积分理论重新受到关注?
实现同步的方法目前有自适应方法、线性和非线性反馈方法、Backstepping方法等,这些方法的前提条件是系统的所有状态变量都能得到,并可以参加控制?Njimeijer[8]首次提出了一种将混沌同步控制器看成是观测器设计的方法?从实际应用来说,一般非线性系统的状态并非都可观测到,因此使用状态观测器进行混沌同步系统的设计更贴近工程实际?基于状态观测器的混沌同步研究也取得了一些成果[9-13]?本文提出的控制律固定了输出采样器的结构,只通过极点配置技术选择反馈增益矩阵L,就可以实现任意非奇异线性关系的广义同步,更贴近实际情况,工程上实现起来更容易?
1 分数阶微分
目前有多种分数阶微分的定义
[14]
,其中应用
较多的是Riemann-Liouville(R-L)分数阶微分定义和Caputo分数阶微分定义?在理论研究中应用较多的是R-L定义?由于Caputo的分数阶微
分定义更容易给出分数阶微分方程的初值条件,因而在工程中应用较广?本文采用Caputo定义?
Caputo分数阶微分可以用Riemann-
Liouville分数阶积分算子0Ipt
来定义?
0Iptf(t)=
1Γ(p)∫
t
0f(τ)(t-τ)1-p
dτ,(1)
这里p>0,f:R→R,Γ(?)为伽玛函数?
Caputo分数阶微分定义可写为
C
0Dq
tf(t)=0In-qt
Dn
f(t)=1Γ(n-q)
×
∫
t
0
f(n)
(τ)(t-τ)dτ
?
(2)
n-1≤q<n∈N,这里f(t)∈Cn
(R,R)?为简便起见,本文使用算子Dq来表示
Caputo分数阶微分算子C
0Dq
t?
2 新的分数阶超混沌系统
本文研究式(3)所示的分数阶超混沌系统
[15]
:
Dqx1=a(x2-x1),Dqx2=dx1-x1x3+cx2-x4,
Dqx3=x1x2-bx3,
Dqx4=x1+k?
(3)
由文献[15]可知,当参数取a=36,b=3,
c=28,d=-16,k=0畅5,0畅72≤q≤1时,分数阶
系统(3)处于超混沌状态?
3 广义同步控制器设计
3.1 分数阶系统稳定性理论
文献[16]研究了分数阶线性系统的稳定性问题并给出了判断分数阶系统稳定性的充要条件?
引理1[16]
考虑自治系统:Dqx=Ax,x(0)=x0,
(4)
其中0<q<1,x∈Rn
,A∈R
n×n
,Dqx=(Dqx1,
…,Dqxn)T?系统(4)是渐近稳定的,当且仅当对矩阵A的任意特征值
arg(eig(A))>qπ/2
(5)
都成立,这里arg(s)表示变量s的幅角?
3.2 广义观测器设计
设分数阶驱动系统为
Dqx=Ax+f(x)+I0,
(6)
式中:x=[x1,x2,…,xn]T
为系统状态矢量,0<q<1,A∈R
n×n
,f(?)为连续向量函数,I0∈Rn
;Ax为线性部分,f(x)为非线性部分,I0为常数矩阵?
定理1 当系统(6)状态可观,令系统输出为sd(x)=Cx,(7)
式中C∈R
n×n为输出矩阵?设计如下的分数阶非
线性状态观测器(响应系统):
Dqy=Q-1
AQy+Q-1
f(x)+Q-1
I0+
L(sd(x)-sr(y))?
(8)
式中,L为反馈增益矩阵,Q为满秩矩阵?系统(8)的输出为
sr(y)=CQy?
(9)
如满足arg(eig(A-LC))>qπ
2
,则分数阶驱动
系统(6)和分数阶响应系统(8)的输出满足limt→∞‖e‖=limt→∞
Qy-x=0,即实现了两个分数阶超混沌系统的广义同步?
证明 由于分数阶驱动系统(6)和分数阶响应系统(8)的广义同步误差为e=Qy-x,根据分数阶微分的性质,可求得误差系统为Dqe=QDqy-Dqx=Q(Q
-1
AQy+Q-1f(x)+Q-1I0-
L(sr(y)-sd(x)))-(Ax+f(x)+I0)=
(A-LC)(Qy-x)=(A-LC)e?
(10)
因为(A-LC)为时不变矩阵,如果(A,C)可观测,则通过极点配置技术选择反馈增益矩阵
661东北大学学报(自然科学版) 第32卷
L,可以满足arg(eig(A-LC))>qπ
2
,从而由
引理1,limt→∞e=limt→∞Qy-x=0,即实现了两个分数阶超混沌系统的广义同步?因为(A-LC)中没有因子Q的影响,所以基于式(10)的观测器可以实现任意非奇异比例因子的广义同步?3.3 数值仿真
分数阶超混沌系统(3)可写成如下形式:
Dqx1Dqx2
Dqx3Dqx4
=-aa
0
0dc0-100-b010
0
0
x1
x2
x3x
4
+0-x1x3
x1x20
+00
0k,(11)
其中,A=
-363600-16280
-1
00-30100
0,f(x)=[0,-x1x3,x1x2,
0,0]T,
I0=[0,0,0,0.5
]T?
此时响应系统为Dqy1Dqy2
Dq
y3Dqy4
=Q-1-363600
-16280-1
00-301
0
00Q
y1y2y3y4+Q-1
0-x1x3x1x2
0+Q
-1
00
00.5+LCx1x2
x3x4
-CQ
y1y2y3y4
?
(12)
令eig(A-LC)=-50
-50
-50-50,满足条件arg(eig
(A-LC))
>
qπ2
,取C=
2000
030000400
00
2
,利用极点配置技术,求得反馈增益矩阵L=71200-8260-0.5
0011.7500.50025
,由式
(11),式(12)和反馈增益矩阵L,可得误差系统为
Dqe=(A-LC)e,(13)
即
Dqe1Dqe
2Dqe3
Dqe4
=
-500000-500000-5000
0
0
-50
e1e2e3e4?使用MATLAB进行仿真,初始点选取为[x1,x2,x3,x4]T=[0.4,0.3,0.02,0.03]T和[y1,y2,y3,y4]T=[0.2,0
.1,0.02,0.03]T,
取Q=123414916
18276411681256
,
这里,ei=xi-Qyi,i=1,2,3,4?
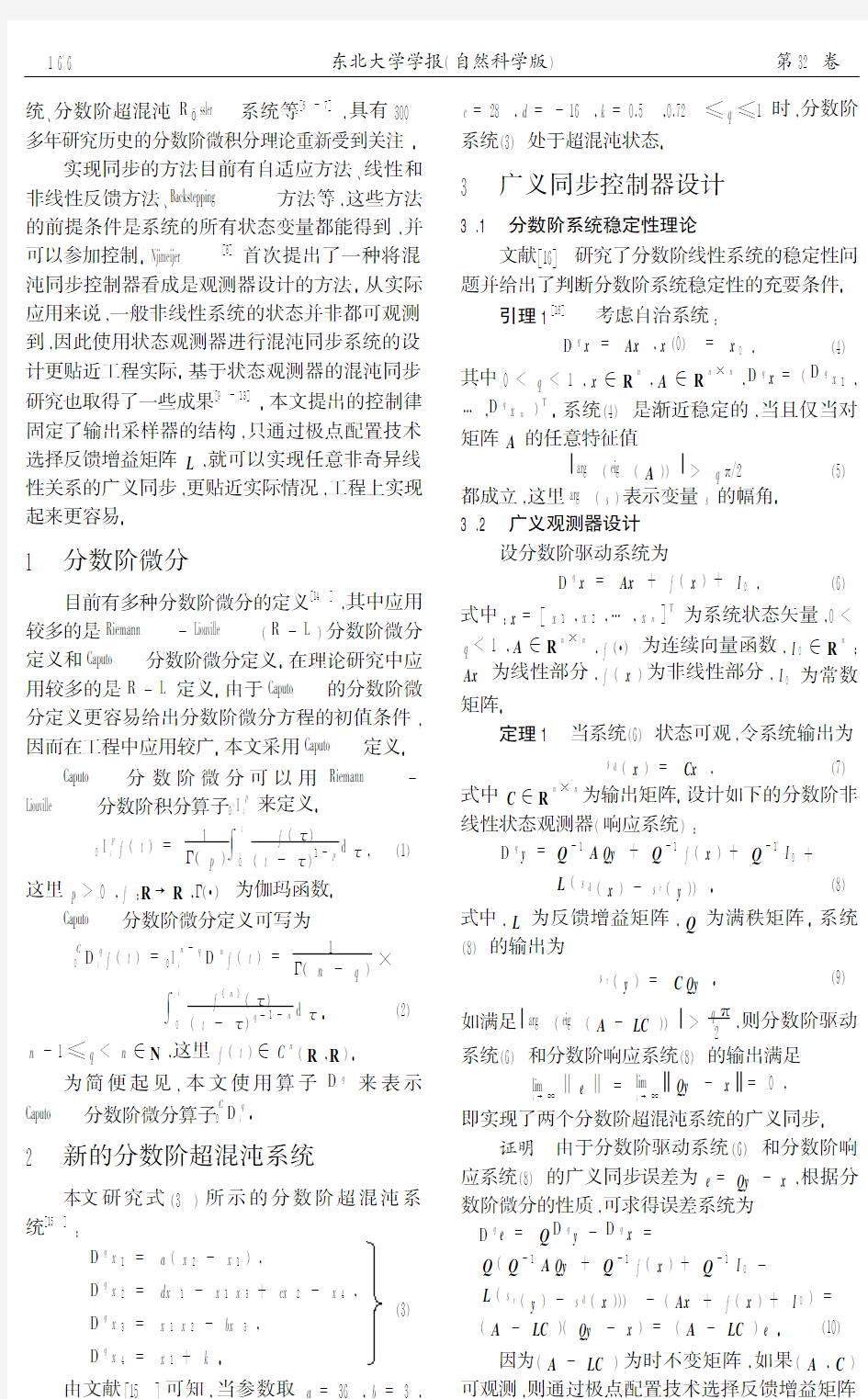
xi和Qyi的误差相图如图1所示?可以清楚地看到,系统中的xi和Qyi的误差ei很快达到0,说明驱动系统和响应系统达到完全状态广义同步,即观测器实现了对这个新分数阶超混沌系统的广义同步?
图1 驱动系统(11)和响应系统(12)在q=0.9时广义同步误差曲线
Fig.1 Generalizedsynchronizationerrorsofdrivesystem(11)andresponsesystem(12)whenq=0.9
761第2期 孙 宁等:基于状态观测器的新分数阶超混沌系统广义同步
4 结 论
本文设计了一个观测器,用以实现与一个新的分数阶超混沌系统具有任意非奇异线性关系的广义同步?这种方法是在观测器结构固定,通过调整反馈增益阵L来实现对已知分数阶超混沌系统的广义同步?数值仿真证明了这个方法的有效性?实际上,当Q分别取单位阵I和对角元素非零的等值方阵时,即是经典的完全同步和投影同步?这个方法由于不用计算广义同步时的条件
Lyapunov指数,并且固定了输出采样器的结构,只需调节反馈增益阵L,因而具有重要的实际应用价值?
参考文献:
[1]PecoraLM,CarrollTL.Synchronizationinchaoticsystems[J].PhysicalReviewLetters,1990,64(8):821-824.[2]CaiN,JingYW,ZhangSY.Modifiedprojectivesynchronizationofchaoticsystemswithdisturbancesvia
activeslidingmodecontrol[J].Communicationsin
NonlinearScienceandNumericalSimulation,2010,15
(6):1613-1620.
[3]ZhangHG,MaTD,FuJ,etal.Robustlagsynchronizationbetweentwodifferentchaoticsystemsvia
dual-stageimpulsivecontrol[J].ChinesePhysics:B,2009,
18(9):3751-3757.
[4]WangZL.Anti-synchronizationintwonon-identicalhyperchaoticsystemswithknownorunknownparameters
[J].CommunicationsinNonlinearScienceandNumerical
Simulation,2009,14(5):2366-2372.
[5]RulkovNF,SushchikMM,TsimringLS,etal.Generalizedsynchronizationofchaosindirectionallycoupled
chaoticsystem[J].PhysicalReview:E,1995,51(2):980
-995.
[6]ZhuH,ZhouSB,HeZS.Chaossynchronizationofthefractional-orderChen摧ssystem[J].Chaos,Solitons&
Fractals,2009,41(5):2733-2740.[7]XuC,FengJW,AustinF,etal.ThesynchronizationofRosslerhyperchaoticsystemwithafractionalorder[J].
InternationalJournalofNonlinearSciencesandNumerical
Simulation,2009,10(11/12):1517-1521.
[8]NijmeijerH,MareelsIMY.Anobserverlooksatsynchronization[J].IEEETransactionsonCircuitsand
Systems:I,1997,44(10):882-890.
[9]陈向荣,刘崇新,李永勋?基于改进观测器的分数阶超混沌Chen系统广义同步[J]?西安交通大学学报,2008,42
(2):238-242?
(ChenXiang-rong,LiuChong-xin,LiYong-xun.
Generalizedsynchronizationoffractionalorderhyperchaotic
Chensystemwithimprovedobserver[J].JournalofXi摧an
JiaotongUniversity,2008,42(2):238-242.)
[10]刘杰,李新杰,何小亚,等?分数阶超混沌系统的线性广义同步观测器设计[J]?动力学与控制学报,2009,7(3):245
-247?
(LiuJie,LiXin-jie,HeXiao-ya,etal.Lineargeneralized
synchronizationobserverdesignofthefractionalhyperchaotic
system[J].JournalofDynamicsandControl,2009,7(3):
245-247.)
[11]SunYJ.AsimpleobserverofthegeneralizedChenchaoticsystems[J].Chaos,Solitons&Fractals,2009,39(4):
1641-1644.
[12]GhoshD,SahaP,ChowdhuryAR.LinearobserverbasedprojectivesynchronizationindelayRosslersystem[J].
CommunicationsinNonlinearScienceandNumerical
Simulation,2010,15(6):1640-1647.
[13]ZemoucheA,BoutayebM.Nonlinear-observer-basedH-infinitysynchronizationandunknowninputrecovery[J].
IEEETransactionsonCircuitsandSystems:Ⅰ,2009,56
(8):1720-1731.
[14]PodlubnyI.Fractionaldifferentialequations[M].SanDiego:AcademicPress,1999:62-86.
[15]WuXJ,LuHT,ShenSL.Synchronizationofanewfractional-orderhyperchaoticsystem[J].PhysicsLetters:A,
2009,373:2329-2337.
[16]MatignonD.Stabilityresultsforfractionaldifferentialequationswithapplicationstocontrolprocessing[C]∥
IEEE/SMCProceedingsofComputationalEngineeringin
SystemsandApplication.Lille,1996:963-968.
861东北大学学报(自然科学版) 第32卷
混沌与分数阶混沌系统同步控制研究及其电路仿真
混沌与分数阶混沌系统同步控制研究及其电路仿真 文章来源:伟智论文服务中心 [打印] 【摘要】混沌作为一种复杂的非线性运动行为,在物理学、化学、信息技术以及工程学等领域得到了广泛的研究。由于混沌对初值的极端敏感性、内在的随机性、连续宽谱等特点,使其特别适用于保密通信、信号处理、图象加密等领域,因此,混沌同步成为混沌应用的关键技术。在参阅大量文献的基础上,本文利用理论证明,数值模拟以及电路仿真相结合的方法,对混沌系统同步、分数阶超混沌系统同步、以及非自治超混沌系统进行了研究。本文的主要研究内容如下:1.基于Lyapunov稳定性理论,利用自适应控制方法,以不确定单模激光Lorenz系统作为驱动系统,将不确定单涡旋混沌系统作为响应系统,设计了非线性反馈控制器及参数识别器,使响应系统的所有状态变量严格地按函数比例跟踪驱动系统的混沌轨迹,并辨识出包括非线性项在内的驱动系统和响应系统的不确定参数,利用四阶龙格库塔仿真模拟,结果表明了该方法的有效性。2.应用驱动-响应方法、反馈线性化方法以及基于Lyapunov方程的Backstepping 控制方法,研究了分数阶超混沌L(u|¨)系统同步问题。其次,针对上述分数阶混沌系统同步方法中存在的不足,基于分数阶系统的稳定性理论,提出了分数 阶超混沌系...更多统的自适应同步方法,用两个控制器与两个驱动变量实现 了不确定分数阶超混沌L(u|¨)系统的自适应同步,给出了自适应同步控制器和参数自适应率,辨识出系统的不确定参数。最后,结合Active控制技术,实现了异结构分数阶超混沌系统的同步。理论证明、数值模拟以及电路仿真证实了上述同步方法的有效性和可行性。3.采用调节连续信号频率的方法,将外界控制信号引入到超混沌系统中,设计了一个新四维非自治超混沌系统。通过精确地调节模拟输入信号的频率,观察和验证新系统的非线性动力学特性,具体为 周期轨、二维环面、混沌和超混沌现象。通过Lyapunov指数图,分岔图来解释系统的动力学特性,并且给出了设计的实验电路及其观测的结果,进一步从物 理实现上验证仿真结果的准确性。最后利用单变量耦合反馈控制方法,通过电路实验实现了非自治超混沌系统的同步。还原 【Abstract】 Chaotic systems are well known for their complex nonlinear systems, and have been intensively studied in various fields such as physics, chemistry, information technology and engineering. In virtue of its characteristics of chaos such as hyper sensitivity to initial conditions, high randomicity and board spectra for its Fourier transform, chaos can be especially applied to secure communications, signal processing and image encryption and so on. Thus chaos synchronization has become the key process in the application of chaos. The research has studied the relative problems of chaos synchronization, synchronization of fractional-order hyper-chaotic systems and analysis of a new four-dimensional non-autonomous hyper-chaotic system, using
数字通信系统中的载波同步技术研究
数字通信系统中的载波同步技术研究 一、引言 在数字通信系统中解调方式可以决定数字调制系统的性能。载波恢复是数字通信系统中一个必不可少的部分,补偿了信号在传输过程中造成的频偏损害且跟踪相位。 二、载波同步信号的性能要求 载波同步系统的主要性能指标是精度、效率、相位抖动、同步建立时间等。 (一)精度 精度是指提取载波与需要的载波标准比较,相位误差应该尽量小。 (二)效率 效率指获取载波信号的过程中尽量少消耗发送功率。载波同步追求的是高效率。 (三)同步建立时间ts 同步建立时间是指从开机或失步到同步所需要的时间。为了使同步建立的更快载波同步系统要求ts越小越好。 三、频偏及载波相位误差对数字通信系统的影响 对双边带信号设,是提取的相干载波,解调器滤波后输出低频信号m’(t)为(1) 如果提取的相干载波与输入载波没有相位差,即 =0, =1,则解调输出,这时信号幅度最大。若存在相位误差,因为 <1,解调后输出信号幅度下降,信噪比下降倍,因此会使误码率增加。对2psk信号当信噪比下降倍时,这时误码率将会变为 (2) 对于单边带解调和残留边带解调而言,相位误差不仅会使信噪比下降,而且在解调器输出中会产生原基带信号的正交项,使基带信号发生畸变,这种影响将随增大而严重。 (3) 在数字通信系统中因为发送端和接收端的本振时钟不一致,用在载频和中频上的射频振荡器的频率不确定性也会引起大的频偏,不同频偏时相邻符号间不仅有固定的相位差变化,而且还会随着时间的变化额外加上某个不确定相位。星座图上表现出来的就是星座图不是在固定的几个点而是随着时间变化在旋转。 图1是用matlab工软件仿真的不同频率偏移时 -dqpsk通信系统的误码率曲线。从图1可以看出频率偏移也会导致 -dqpsk通信系统在检测时误比特率(ber)性能变差,频偏对通信系统的误码率的影响很大,为此必须在接收端补偿这个频偏,这就需要进行载波恢复,评价接收机性能的重要标准之一就是载波提取性能的好坏,为了保证信息的可靠传输,对载波相位偏移以及频率偏移的估计方法的研究具有重要意义。
实验报告:混沌同步控制与图像加密
混沌同步控制与图像加密 ――― 《混沌实验教学平台的设计与实现》中期期报告 (华南师范大学物理与电信工程学院指导老师:李军学生:王龙杰、张丹伟、杨土炎)摘要:基于混沌系统的某些独特性质,如初值敏感性,本文讨论了混沌理论的两个重要运用,即基于Lorenz 混沌系统的同步控制和基于Logistic 混沌映射的图像加密。在讨论与分析的基础上,利用MA TLAB 软件进行数值计算与模拟,得到较好的效果。 关键词:Lorenz 混沌系统;同步控制;Logistic 混沌映射;图像加密;MATLAB 基于Lorenz 混沌系统的同步控制 一.引言 混沌是自然界及人类社会中的一种普遍现象,至今为止,在学术界对“混沌”还没有统一的被普遍接受的定义。混沌运动是确定性和随机性的对立统一, 即它具有确定性和随机性, 所谓确定性是指混沌运动是在确定性系统中发生的,可以用动力学方程形式表述, 这与完全随机运动有着本质的区别; 所谓运动具有随机性, 是指不能像经典力学中的机械运动那样由某时刻状态可以预言以后任何时刻的运动状态, 混沌运动倒是像其他随机运动或噪声那样, 其运动状态是不可预言的, 换言之, 混沌运动在相空间中没有确定的轨道。混沌运动对初始状态(条件)具有敏感的依赖性, 只要对系统施加非常微小的扰动,就可能把系统从一个不稳定的周期运动转变到另一个不稳定的周期运动上去,也可能转变到另一稳定的运动状态上, 通 过这个特性, 我们可以利用混沌有意义的一面, 而避其有害的一面。Lorenz 系统作为第一个混沌模型,是混沌发展史上的一个里程碑, 具有举足轻重的地位。对Lorenz 系统的深入研究无疑已经极大地推动了混沌学的发展。 人们发现混沌控制在众多领域中有着广阔的应用前景, 尤其在电子学、电力系统、保密 通信和振荡发生器设计等领域有着巨大的应用前景, 因此引起了广泛的重视。由于混沌行为对初始状态的敏感依赖性, 受到噪声、干扰以及系统不稳定的影响, 特别是在混沌同步中, 实 际系统中很难观测到混沌同步。自从1990 年, Pecora 和Carroll 提出了混沌同步的概念和 方法以后,随着混沌同步研究的不断深入, 混沌控制与同步的研究工作得到了长足的发展, 并 逐渐成为混沌与控制领域研究的热点。对于相近的混沌轨道, 通过相同的非线性系统控制, 最终可能导致完全不相关的状态。但在实际应用中, 往往要求控制得到相关的状态或所需要的同步结果, 本文采用了加入反馈控制量的方法使其耦合, 最终达到所要求的同步。在计算机上的仿真结果显示, 能在短时间内实现耦合同步控制。
非线性系统中混沌的控制及同步及其应用前景_一_
第1 6 卷第1 期物理学进展o l.16, N o. 1 V 1996 年 3 月PRO GR E S S I N PH Y S I C S M ac r ch , 1996 非线性系统中混沌的控制与同步 Ξ 及其应用前景(一) 方锦清 ( 中国原子能科学研究院, 北京102413) 提要 全文系统地综述了非线性科学中一个富有挑战性及具有巨大应用前景的重大课题——非线性系统中混沌的控制与同步及其应用的主要进展, 包括了作者关于超混沌同步及其控制等方面的研究成果。我们对现有的各种混沌的控制方法和混沌的同步原理提出了分类和评述。概述了实验与应用的现状, 指出了发展前景, 全文分为( 一) ( 二) 两篇, 第( 一) 篇以混沌控制的机理和方法为主要论题展开广泛的讨论; 第(二) 篇以混沌的同步、超混沌的同步及其控制为论题, 同时包括众多的实验应用的研究, 进行较详尽的综述和分析评论, 比较完整地概括了迄今国内外该课题的发展现状和主要趋势。 总论 混沌, 当今举世瞩目的前沿课题及学术热点, 它揭示了自然界及人类社会中普遍存在的复杂性, 有序与无序的统一, 确定性与随机性的统一, 大大拓广了人们的视野, 加深了对客观世界的认识。它在自然科学及社会科学等领域中, 覆盖面之大、跨学科之广、综合性之强, 发展前景及影响之深远都是空前的。国际上誉称混沌的发现, 乃是继本世纪相对论与量子力学问世以来的第三次物理学大革命, 这场革命正在冲击和改变着几乎所有科学和技术领域, 向我们提出了巨大的挑战ΞΞ。 混沌的发现已过而立之年。首要的问题是, 混沌究竟有什么应用和发展前景? 这是摆在人们面前的一个重大课题及普遍关注的问题。特别是, 在我国改革开放和振兴经济的大潮面前, 这类提问和呼声更为强烈, 这确实也是深入开展混沌研究的巨大推动力。由于混沌的奇异特性, 特别是对初始条件极其微小变化的高度敏感性及不稳定性, 所 谓“差之毫厘失之千里”的缘故, 长期以来有些人总觉得混沌是不可控的、不可靠的, 因而 Ξ 本课题是国家留学回国人员重大科技资助项目、国家核科学工业基金资助项目及I A EA 科研合同课题。 ΞΞ 混沌发现的重要性论述请参阅: 詹姆斯·格莱克著,“混沌开创新科学”( 张淑誉译, 郝柏林校) , 1990, 上海译文出版社。
典型混沌系统和混沌同步的简介
2典型混沌系统和混沌同步的简介 2.1典型混沌系统的介绍 混沌从表述形式上大体包括两大类:以微分方程表述的时间连续函数和以状态方程表述的时间离散函数。时间离散系统多用于扩频通信,而时间连续函数多见于保密通信之中。介于本文主要考虑连续系统在保密通信之中的应用,这里就重点介绍连续时间混沌系统中的典型模型:Lorenz 系统、蔡氏电路、统一混沌系统。 2.1.1 Lorenz 系统 混沌的最早实例是由美国麻省理工学院的气象学家洛伦兹在1963年研究大气运动时描述的。他提出了著名的Lorenz 方程组: () ??? ????----cz xy y xz bx y x y a x =z==。。 。 (2-1) 这是一个三阶常微分方程组。它以无限平板间流体热对流运动的简化模型为基础,由于它的变量不显含时间t ,一般称作自治方程。式中x 表示对流强度,y 表示向上流和向下流在单位元之间的温度差,z 表示垂直方向温度分布的非线性强度,-xz 和xy 为非线性项,b 是瑞利数,它表示引起对流和湍流的驱动因素 (如贝纳对流上下板的温度差△T)和抑制对流因素 (如(Prandtl)数粘性)之比,是系统 (2-1)的主要控制参数。k v a =是普朗特数(v 和k 分别为分子粘性系数和热传导系数),c 代表与对流纵横比有关的外形比,且a 和c 为无量纲常数。在参数范围为)1/()3(--++?>c a c a a b 时,Lorenz 系统均处于混沌态。 在混沌区域内选择系统参数a=10, b=28,c=8/3,取系统的初始状态为[x(0), y(0), z(0)]=[10, 10, 10],此时,系统为一混沌系统,系统的三维吸引子如图2.1所示,二维吸引子如图2.3所示,图2.2所示分别为分量x 、y 随时间t 的变化情况。 图2.1 Lorenz 系统的吸引子
通信系统中同步技术的类型与实现方法
技术研发TE C H N O LO G Y A N D M A R K ET V〇1.23,N〇.12,2016通信系统中同步技术的类型与实现方法 彭宇 (平江第一中学,湖南平江41500) 摘要:同步属于通信系统的重要部分,其性能直接影响着通信系统的运行效果,如果同步技术不到位,会影响整个通信系统的稳定性。主要针对通信系统中常用的同步技术的类型与实现方法进行分析。 关键词:通信系统;同步技术;类型;实现方法 doi:10. 3969/j.issn.1006 -8554.2016. 12.070 〇引言 同步技术对于通信系统运行的影响非常大。在各类因素的影响下,通信时收发双方需要设置在不同的地点,要想同一步调地进行工作,就需要利用通信系统的同步技术来完成。同步系统性能的好坏会直接影像整个通信系统的运行效率,如果性能不佳,甚至会给整个系统带来瘫痪性后果。同步技术有很多的种类,本文是对整个通信系统进行研究分析,讲述同步技术的方法、性能和原理及对系统性能的影响等,从而对同步技术有一个较完整和全新的认识。 1同步技术的类型和基本原理 1.1功能分类 按功能划分,同步技术主要包括载波同步、位同步、群同步和网同步几种类型。载波同步技术在通信中频带的传输采用长距离传输方式,而基带传输是短距离采用的传输方式,因此通信系统主要通过发送端来进行调制。信号中的接收调制载波与本地的载波信号达到同频同相,获取的本地载波就是载波同步。位同步技术又可以称之为元同步,它是数字通信系统中特殊存在的一种同步技术,位同步的产生是基于基带传输和频带传输的需要。所有消息在数字通信系统中都是通过位同步传送的,这是取样判决的基础。 在数字通信中,字是组成信息流的基本单位,首先字是由多个码元所形成,然后再由多个字形成句。对于多路信号而言,各路正确的信号是由接收端区分的,利用发送端的合路规律进行分路。每群头尾的标记是在数字信息流中发送端插人一些特殊码组,帮助接收端正确的分离各路信号,因此,这一技术又被称为群同步。此外,在社会的发展下,同步技术开始实现与网络通信技术的融合,网络通信是现代通信的一种手段,在通信中有很多种通信和信息传递的设备,各种不同的信息码流是通过设备产生和传送的。建立一个统一协调的系统,其目的就是将低速数字流合并成调整数字进,避免信息丢失,让整个网络系统工作能够顺利的完成。 1.2 实现分类 按照实现类型来分类,同步技术可以分为外同步法和自同步法。在外同步法中,同步信息是由专门的发送端发送,由于在传送的信息并不在导频范围内,所以其频率和功率也受到了限制。第二种方法是自同步法:专门同步的信息将不会被发送端传送出来,但是为了得到专门同步的信息,接收端会从接收到的信号中进行收集。自同步法工作效率高,抗干扰性强,但是,与外同步法相比,该种方式的接收端更加的复杂,增加了成本。 2同步技术的实现方法 目前,最为常用的方法是自同步法,采用该种方式,整个功率和带宽分配都可以通过其进行信号传输,有着广泛的应用空间,载波同步和位同步中也广泛采用了这种方法;此外,自同步 法也是群同步的采用方法,其核心内容包括几个方面:①在自 同步法中,平方变换法、同相正交环法和平方环法是自同步下 载波同步的三个组成部分,在将不直接包含载波的信号进行非 线性变换后,即可提取载波。②自同步法的主要方法就是滤波 法与锁相环法,其中,锁相环法需要在鉴相器后加数字滤波器,这样可以有效解决位同步的抖动问题。③网同步也是自同步 法的一个重要内容,由准同步、主从同步以及相互同步三种组成,准同步这种方法非常的繁琐,其运营效果关系到通信网整 体的状态和运行的状况,此外,准同步还需要保持自身时钟设 置的稳定性,确保设备自身时钟与其他设备是同步的,并将滑 码控制在规定的范围内。 3同步技术的性能指标 影响同步技术性能指标的因素多样化,为了判定这一技术 的有效性,一般采用几个性能指标进行评估:①精度、效率、同 步保持时间和同步时间是载波同步的性能指标。②相位误差、同步立时间、保持时间及同步带宽等是同步的性能指标。③群 同步的性能指标与载波同步、位同步有着很大的不同,它的性 能指标包括假同步概率、漏同步概率和平均建立时间等,正确 或错误是群同步的两种状态,两者必定会有一个存在。④时间 间隔误差、最大时间间隔误差、时延和频率准确度等是网同步 的性能指标。 4结语 同步系统对于通信系统的正常运行影响是非常大的,为了 充分发挥同步系统的作用,需要采取科学的措施提升其有效性,不断创新其理论与技术,就目前来看,我国学者已经针对同 步系统展开了深人的研究,各类专用性集成软件与多用软件已 经在市场上得到推广。但是,在科技的日新月异的发展下,通 信系统也针对同步系统提出了更高的要求,我们需要不断的进 行创新,进一步提升同步技术的稳定性。 参考文献: [1]商贺,谭志良.基于System Generator的跳频通信系统 LMS干扰对消算法实现[J].军械工程学院学报,2016 (3). [2]向春枝,崔艳.跳频通信系统的异常跳变故障检测模型仿 真[J].计算机仿真,2014(10). [3]谢轲,陈建行,高留洋,等.应用灰关联评估方法分析跳频 通信系统[J].现代电子技术,2013(7). [4]鄢茂林,蒋子刚,涂卫红.跳频通信同步信息传输的抗干 扰策略[J].电讯技术,2〇09(4). 118
No张丽分数阶统一混沌系统
漳州师范学院 毕业论文 分数阶统一混沌系统地同步The Synchroni zati on of Fracti on alorder Un ifiedSystem 姓名:张丽 学号:070401326 系别:数学与信息科学系 专业:数学与应用数学 年级:07级 指导教师:蔡建平教授 2018年05月22日
本文运用耦合同步控制法,研究分数阶统一混沌系统地同步问题?首先,分别在分数阶统一系统地每个方程上加耦合控制变量使得驱动系统和响应系统达到同步;然后,在每个方程同时加耦合控制变量使得驱动系统响应系统达到同步?并运用 Laplace变换理论证明,最后用Matlab软件进行数值仿真进一步验证本文所用地方法地有效性.b5E2RGbCAP 关键词:分数阶;统一混沌系统;同步控制;耦合控制 Abstract This paper applies coupled synchronization control method to research the synchronization of fractional order unified chaotic system. First of all, the coupled control variables are added to each equation of fractional unified system makes the drive system and response system to achieve synchronization. Then, the control variablesare added to each equation at the same time makes the drive system and response system to achieve synchronization.Furthermore, detailed proofsare given by using the Laplace transformation theory. Finally, numericalsimulations based on Matlab verify the effectiveness of the present methods EanqFDPw Key words: fractional order。unified system synchronization control coupling COntro DXDiTa9E3d
分数阶混沌系统的仿真程序
分数阶混沌仿真程序,以chen系统为例,其他系统只需修改相应的外部函数。 ------------------------------------------------------------------------------------ function fra_chaos_pro(x,t,q)%x为初值,t为运行时间,q为分数阶数 h=0.01;%步长 N=t/h;%运行步数 l=length(x);%变量维数 y=zeros(l,N+1); y1=zeros(l,N+1); M1=zeros(l,1); N1=zeros(l,1); %预估校正法,fra_chaos_fun外部函数 y1(:,1)=x'+h.^q'.*fra_chaos_fun(t,x)'./(gamma([q']).*q'); y(:,1)=x'+h.^q'.*(fra_chaos_fun(t,y1(:,1))+q'.*fra_chaos_fun(t,x)')./gamma(q'+2); for n=1:N; M1=(n.^(q'+1)-(n-q').*(n+1).^q').*fra_chaos_fun(t,x)'; N1=((n+1).^q'-n.^q').*fra_chaos_fun(t,x)'; for j=1:n; M1=M1+ ((n-j+2).^(q'+1)+(n-j).^(q'+1)-2*(n- j+1).^(q'+1)).*fra_chaos_fun(t,y(:,j));N1=N1+((n-j+1).^q'-(n- j).^q').*fra_chaos_fun(t,y(:,j)); end
分数阶统一混沌系统matlab程序
function dy=united-fra-chaos q1=0.9;q2=0.9;q3=0.8; h=0.01;N=2000; a=1; x0=2;y0=1;z0=3; %x0=-3.5;y0=4.2;z0=2.5; M1=0;M2=0;M3=0; x(N+1)=[0];y(N+1)=[0];z(N+1)=[0]; x1(N+1)=[0];y1(N+1)=[0];z1(N+1)=[0]; x1(1)=x0+h^q1*(25*a+10)*(y0-x0)/(gamma(q1)*q1); y1(1)=y0+h^q2*((28-35*a)*x0-x0*z0+(29*a-1)*y0)/(gamma(q2)*q2); z1(1)=z0+h^q3*(x0*y0-(8+a)*z0/3)/(gamma(q3)*q3); x(1)=x0+h^q1*((25*a+10)*(y1(1)-x1(1))+q1*(25*a+10) *(y0-x0))/gamma(q1+2); y(1)=y0+h^q2*((28-35*a)*x1(1)-x1(1)*z1(1)+(29*a-1)*y1(1)+q2*((28-35*a)*x0-x0*z0+(29*a-1 )*y0))/gamma(q2+2); z(1)=z0+h^q3*(x1(1)*y1(1)-(8+a)*z1(1)/3+q3*(x0*y0-(8+a)*z0/3))/gamma(q3+2); for n=1:N M1=(n^(q1+1)-(n-q1)*(n+1)^q1)*(25*a+10)*(y0-x0); M2=(n^(q2+1)-(n-q2)*(n+1)^q2)*((28-35*a)*x0-x0*z0+(29*a-1)*y0); M3=(n^(q3+1)-(n-q3)*(n+1)^q3)*(x0*y0-(8+a)*z0/3); N1=((n+1)^q1-n^q1)*(25*a+10)*(y0-x0); N2=((n+1)^q2-n^q2)*((28-35*a)*x0-x0*z0+(29*a-1)*y0); N3=((n+1)^q3-n^q3)*(x0*y0-(8+a)*z0/3); for j=1:n M1=M1+((n-j+2)^(q1+1)+(n-j)^(q1+1)-2*(n-j+1)^(q1+1))*(25*a+10)*(y(j)-x(j)); M2=M2+((n-j+2)^(q2+1)+(n-j)^(q2+1)-2*(n-j+1)^(q2+1))*((28-35*a)*x(j)-x(j)*z(j)+(29*a-1)*y(j )); M3=M3+((n-j+2)^(q3+1)+(n-j)^(q3+1)-2*(n-j+1)^(q3+1))*(x(j)*y(j)-(8+a)*z(j)/3); N1=N1+((n-j+1)^q1-(n-j)^q1)*(25*a+10)*(y(j)-x(j)); N2=N2+((n-j+1)^q2-(n-j)^q2)*((28-35*a)*x(j)-x(j)*z(j)+(29*a-1)*y(j)); N3=N3+((n-j+1)^q3-(n-j)^q3)*(x(j)*y(j)-(8+a)*z(j)/3); end x1(n+1)=x0+h^q1*N1/(gamma(q1)*q1); y1(n+1)=y0+h^q2*N2/(gamma(q2)*q2); z1(n+1)=z0+h^q3*N3/(gamma(q3)*q3); x(n+1)=x0+h^q1*((25*a+10)*(y1(n+1)-x1(n+1))+M1)/gamma(q1+2); y(n+1)=y0+h^q2*((28-35*a)*x1(n+1)-x1(n+1)*z1(n+1)+(29*a-1)*y1(n+1)+M2)/gamma(q2+2);