相位裕度
闭环极点法是以系统左平面共轭复极点到原点斜率的倒数的绝对值β来判断系统稳定性的方法,β越大,系统就越稳定。在存在减幅振荡的时候,能较好的描述和量化系统的稳定性。
若一个闭环系统阶跃响应出现减幅振荡,系统的闭环传输函数必然会出现左平面共轭复数根s = σ±ωj,阶跃响应会出现一个衰减指数项,形式是K × exp(σt) × sin(ωt) , 可以看作一个衰减的指数项乘以一个正常的sin函数。
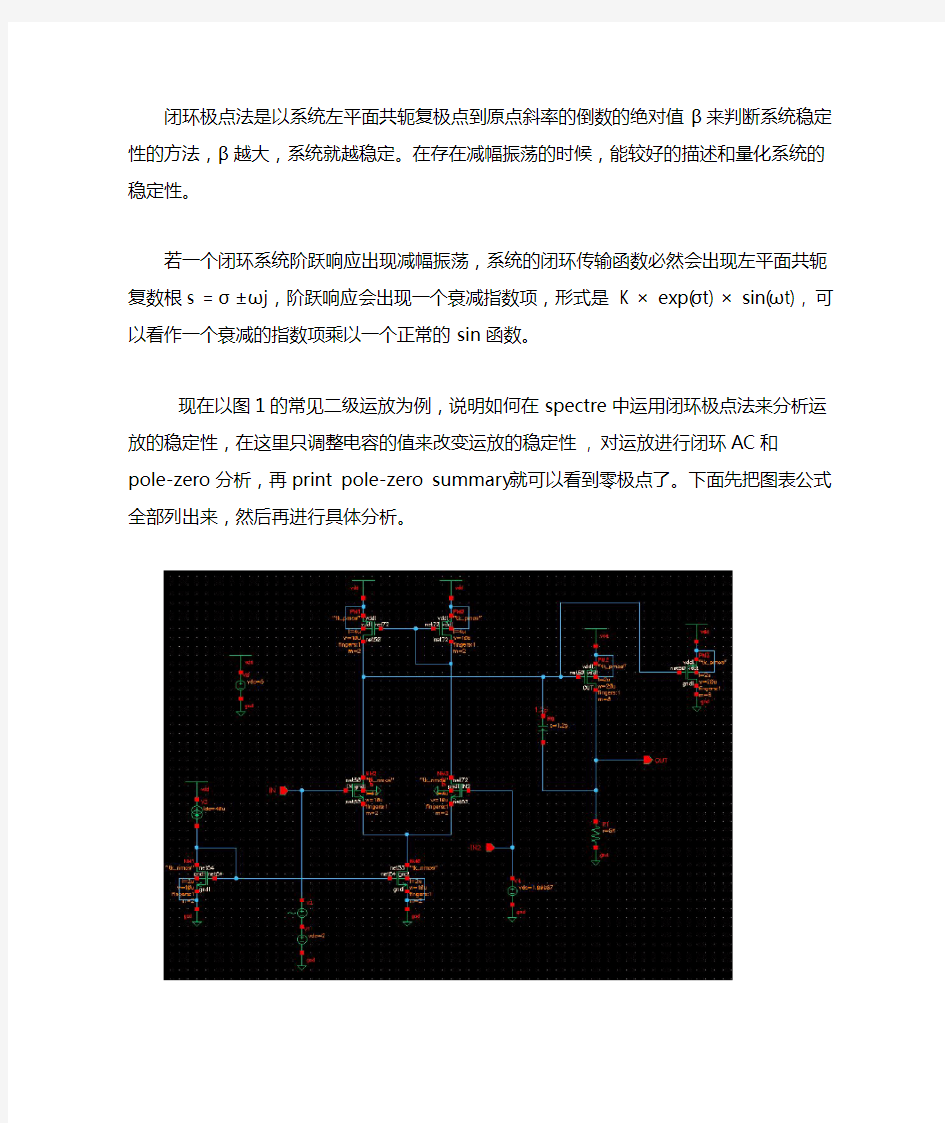
现在以图1的常见二级运放为例,说明如何在spectre中运用闭环极点法来分析运放的稳定性,在这里只调整电容的值来改变运放的稳定性, 对运放进行闭环AC和pole-zero分析,再print pole-zero summary就可以看到零极点了。下面先把图表公式全部列出来,然后再进行具体分析。
图1 常见二级运放
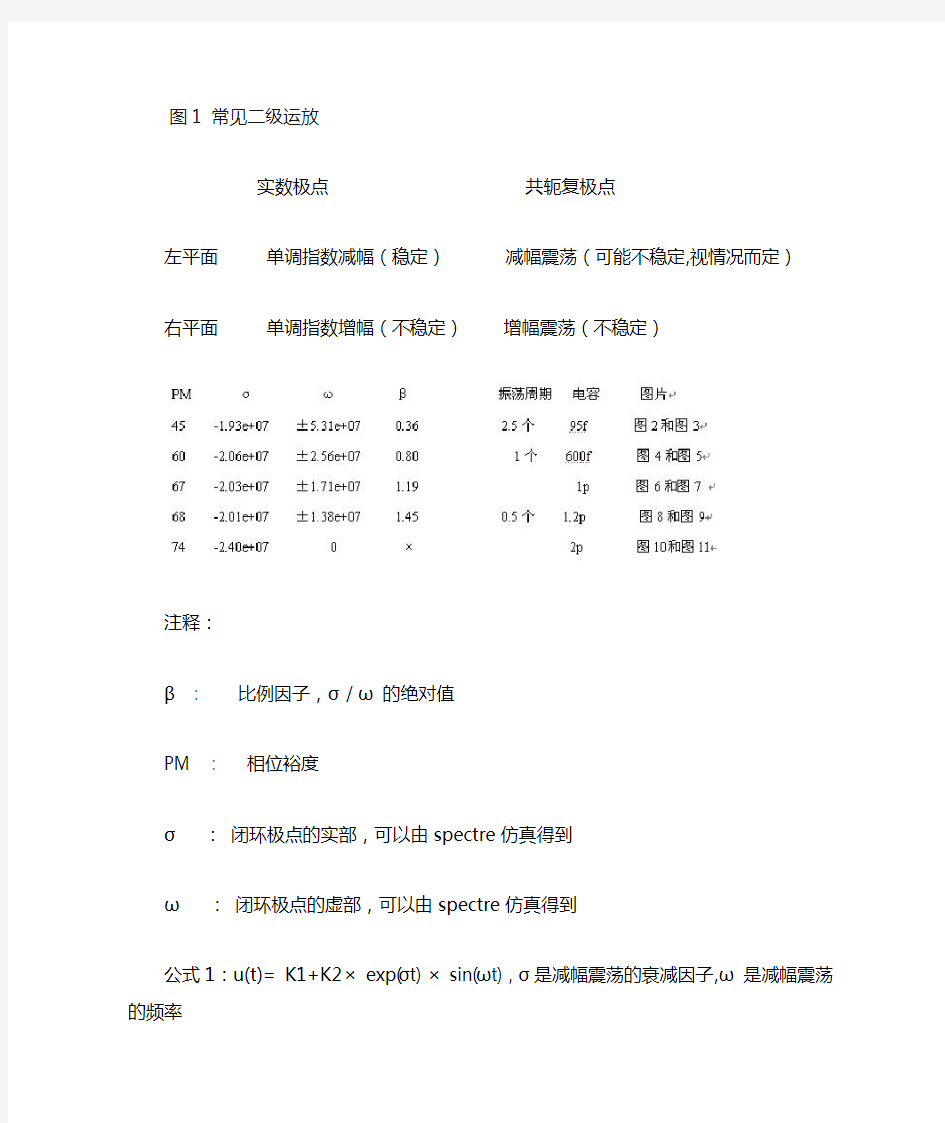
实数极点共轭复极点
左平面单调指数减幅(稳定)减幅震荡(可能不稳定,视情况而定)
右平面单调指数增幅(不稳定)增幅震荡(不稳定)
注释:
β: 比例因子,σ / ω的绝对值
PM : 相位裕度
σ:闭环极点的实部,可以由spectre仿真得到
ω:闭环极点的虚部,可以由spectre仿真得到
公式1:u(t)= K1+K2 × exp(σt) × sin(ωt) , σ是减幅震荡的衰减因子,ω是减幅震荡的频率公式2 :ωT= 2π,T是减幅震荡的周期
公式3:σ= -1 / τ , τ为时间常数
图2 PM=45度时的阶跃响应
图3 PM=45度时的极点分布
首先来分析PM=45的情况,阶跃响应和闭环极点如图2和图3所示,系统出现了左平面上的共轭复根, 时域上出现了减幅振荡。肉眼能分辨的震荡包括三个上凸,两个下凹,最后一个上凸不很明显,合共2.5个振荡周期T,这可以说明什么呢?其实一旦出现减幅振荡,理论上再过10年,振荡也不会变为0 ,但无论是考虑到噪声也好,波形软件能够到达的精度也好,减幅振荡一旦衰减到一定的程度,例如1% ,就能够认为振荡消失了。可以尝试计算下经过一个振荡周期波形能衰减到多少。这里经过的时间为t=2.5T,由公式1 和公式2 及β=0.36 可得t=2.5T=2.5×0.36 ×2π×τ=5.7×τ , 就是说指数项经过5.7τ的衰减变为原来的exp(σ×5.7×τ)=0.3% ,这说明指数衰减到约0.3%后,减幅震荡就消失了。
图4 PM=60度时的阶跃响应
图5 PM=60度时的极点分布
接着来看PM=60的情况(图4和图5),β = 0.8 , 刚好比PM=45的β=0.36两倍稍微大一点,这说明同样要衰减到
震荡消失,例如同样经历5.7τ后衰减到0.3%,PM=45的振荡周期理论上应该为PM=60的2.2倍。我们看图4来验证这
一点,PM=60时有一个过冲的上凸和一个不明显的下凹,合共一个振荡周期,而PM=45的情况下震荡了2.5个周期。
图6 PM=67度时的阶跃响应
图7 PM=67度时的极点分布
图8 PM=68度时的阶跃响应
图9 PM=68度时的极点分布
如图8所示,在开始的半个周期内(上凸的那一段),就已经被衰减到零了,还来不及开始下半周期(下凹)的振荡。下面可以按PM=45的情况为标准,振荡刚好为0.5T的β理论上应该大概是PM=45时候的5倍,那就是0.36×5=0.18 ,
以PM=68的情况和图D1和D2为例子,实际的β=1.45 , 说明由于其它极点的影响,振荡周期太少的话,振荡的波形变得较难辩认,这种相互间比例计算误差变大。
图10 完全没有振荡时的阶跃响应
图11 完全没有振荡时的极点分布
最后,当PM调为74时,由图10和图11可以看出,闭环AC也没有了共轭复极点,对应的阶跃响应也没有了过冲和减幅振荡。
所以产生了减幅振荡和不稳定并不是等同的,在我的理解里,稳定等同于没有振荡或者衰减得很快的减幅振荡。相位裕度和稳定性并没有完全的对应关系。如表1所示,系统的稳定性是和闭环极点位置直接关连的。用系统开环的波特
图曲线和相位裕度去推导闭环的零极点分布,去分析稳定性,能有百分百确定的结果吗?这是相位裕度的一个局限的方面.
从表2上可以看出,对于衰减振荡,β的值越大,系统就越倾向于稳定,因为衰减因子越大,振荡衰减得越快,而振荡频率ω越高,在衰减的过程中振荡的次数就越多,就越不稳定。对于exp(σt) × sin(ωt)这个指数正弦项,假设经过5个τ的衰减,振荡消失。将σ变为原来的十倍,由于τ变为原来的十分之一,所以衰减的时间也变为十分之一,衰减过程中振荡的周期次数也变为原来的十分之一。假设将ω增大十倍,同样的5个τ时间内,振荡的周期次数增加到原来的十倍。所以σ和ω的值对稳定性的影响是等价的, 系统走向稳定,或者不稳定,取决于σ与ω的比值β在产生了减幅振荡时, β和稳定性的关系还可以从另为一个方面证明。其实这个β就是s平面极点到坐标原点斜率slope绝对值的倒数。打开拉扎维书上P458 , 图15.37二型锁相环的根轨迹。在K增大时,极点沿着轨迹圆向左移动slope的绝对值不断减少,同时稳定性不断增加,这个可以从对应的P457页的波特图可以看出。给大家留个思考问题,图15.37的上半圆的曲线上升部分,σ与ω都在增加,稳定性为什么会增强?上半圆的曲线下降部分,σ与ω都在减少,稳定性为什么会继续增强?开始感到有点意思了吧。
就像相位裕度45度和60度一样,我认为,闭环系统存在左平面上的共轭复极点时,只要β=0.36就接近一般概念上的相位裕度45度的稳定性,β=0.8就接近一般概念上的相位裕度60度的稳定性, 要达到更高的稳定性,需要更高的β值。若是闭环系统不存在共轭复极点,则阶跃响应应没有过冲和减幅振荡。
在存在减幅震荡时,这种方法对稳定性的描述是较线性的,例如一般概念上的相位裕度60度比45度要稳定,但是到底稳定多少?曲线会平滑多少?15度?相位裕度分析只能给出大概的稳定性变化方向,不能线性的量化这个稳定性。β值就可以较线性的量化这个稳定性,这里指出,一般概念上的PM=60(β=0.8)的稳定性约是PM=45(β=0.36)的两倍。回想起拉杂维书上提到过一般PM=45就可稳定,但考虑到工艺角等变化推荐PM=60度,那就是说,拉杂维推荐把稳定性增强一倍来适应这些工艺角等的变化。若在设计中觉得PM=60度太奢侈,可以尝试着选择β=0.6等值。
对比表1 ,可以思考下PM=67和PM=68的情况,相位裕度只差1度,但β值从1.19变化到1.45 , 和电容从1p 变化到1.2p的比例基本一致,那个能更好的反映稳定性?
还有,PM=60和PM=67的阶跃波形图4和图6相差很小,相位裕度和β值却相差很多。当你设计一个运放,把运放的相位裕度改善很多,但在时域阶跃仿真的时候却发现波形变化很小,并感到迷惑的时候,查看β值可以省下你的眼力,再不用盯着屏幕上的波形去辨认出那些小变化。当你要在衰减振荡3,4次的情况下多次调节电路的稳定性,并做出阶跃检验的时候,会体会到β的好处的,那就是不用每一次仿真之后都要比较那些波形。
下面是总结三种仿真方法的优缺点
相位裕度分析
优点:能反映开环系统零极点,带宽,增益变化,输出阻抗等对稳定性的直接影响,对调节电路最有帮助
缺点:和稳定性没有完全的对应关系,大多时候能行
闭环极点法
优点:揭示闭环系统稳定性的本质,和稳定性有完全的对应关系,能较线性地量化存在减幅震荡时的稳定性缺点: 不能反映开环系统零极点,带宽,增益变化等对稳定性的直接影响
电路时域阶跃仿真
优点:最接近和最能反映真实电路的性能,包括大信号特性,和稳定性有最完全的对应关系
缺点:不能反映开环系统零极点,带宽,增益变化等对稳定性的直接影响, 比较表面化,不能很好的理解仿真结果最后,给出闭环极点法的限制:在系统出现减幅振荡时,共轭极点要在实部绝对值最小的三个极点中的两个,即离jw轴距离最近的三个极点中的两个。
当系统出现减幅振荡时,振荡部分的波形无论在延迟时间,还是幅度上都会占据阶跃响应的主特性,在阶跃响应上清晰的表现出来,从而成为我们判断稳定性的依据,为什么不可以直接描述这个振荡呢?
闭环系统的过冲和相位裕度关系的分
Overshoot as a Function of Phase Margin J. C. Daly Electrical and Computer Engineering University of Rhode Island 4/19/03 Figure 1 Figure 2 Amplifier frequency response. PM w t /w eq Q%OS 55o0.700 0.925 13.3% 60o0.580 0.817 8.7% 65o0.470 0.717 4.7% 70o0.360 0.622 1.4% 75o0.270 0.527 0.008%
When an amplifier with a gain A(s) is put in a feedback loop as shown in Figure 1, the closed loop gain, V o /V in = A CL (1) The system is unstable when the loop gain, ? A(s), equals -1. That is, ? A(s) has a magnitude of one and a phase of -180 degrees. An unstable system oscillates. A system close to being unstable has a large ringing overshoot in response to a step input. The phase margin is a measure of how close the phase of the loop gain is to -180 degrees, when the magnitude of the loop gain is one. The phase margin is the additional phase required to bring the phase of the loop gain to -180 degrees. Phase Margin = Phase of loop gain - (-180). The loop gain has a dominant pole at . Higher order poles can be represented by an equivalent pole at . The amplifier is approximated by a function with two poles as shown in Equation 2. (2) Since for frequencies of interest where the loop gain magnitude is close to unity, (3) And, (4) (5) Defining , Table I ? PM is the phase margin. ? w t is the unity gain frequency (rad/sec). ? w eq is the frequency of the equivalent higher order pole (rad/sec). ? Q is the system Quality factor. ? OS is the Over Shoot.
幅值裕量和相位裕量
一般来说,)(ωj G 的轨迹越接近与包围-1+j001j +-点,系统响应的震荡性越大。因此,)(ωj G 的轨迹对01j +-点的靠近程度,可以用来度量稳定裕量(对条件稳定系统不适用)。在实际系统中常用相位裕量和增益裕量表示。 Re Positive Phase Margin Negative Gain Margin Negative Stable System Unstable System (ωj G
64 ω Log ω Log ω Log ω Log ?-90? -270?-180Positive Gain Margin Positive Phase Margin Negative Gain Margin Negative Phase Margin Stable System Unstable System dB ? -90? -270?-1800 dB 图1 稳定系统和不稳定系统的相位裕度和幅值裕度 相位裕度、相角裕度(Phase Margin)γ 设系统的截止频率(Gain cross-over frequency)为c ω 1)()()(==c c c j H j G j A ωωω 定义相角裕度为 )()(180c c j H j G ωωγ+?= 相角裕度的含义是,对于闭环稳定系统,如果开环相频特性再滞后γ度,则系统将变为临界稳定。 当0>γ 时,相位裕量相位裕度为正值;当0<γ时,相位裕度为负值。为了使最小相位系统稳定,相位裕度必须为正。在极坐标图上的临界点为0分
贝和-180度。?-180 增益裕度、幅值裕度(Gain Margin)h 设系统的穿越频率(Phase cross-over frequency) πωωω?)12()()()(+== k j H j G x x x ,Λ,1,0±=k 定义幅值裕度为 ) ()(1 x x j H j G h ωω= 幅值裕度h 的含义是,对于闭环稳定系统,如果系统开环幅频特性再增大h 倍,则系统将变为临界稳定状态。 若以分贝表示,则有 )()(log 20)(x x j H j G dB h ωω-= 当增益裕度以分贝表示时,如果1>h ,则0)(>dB h 增益裕度为正值;如果1 闭环极点法是以系统左平面共轭复极点到原点斜率的倒数的绝对值β来判断系统稳定性的方法,β越大,系统就越稳定。在存在减幅振荡的时候,能较好的描述和量化系统的稳定性。 若一个闭环系统阶跃响应出现减幅振荡,系统的闭环传输函数必然会出现左平面共轭复数根s = σ±ωj,阶跃响应会出现一个衰减指数项,形式是K × exp(σt) × sin(ωt) , 可以看作一个衰减的指数项乘以一个正常的sin函数。 现在以图1的常见二级运放为例,说明如何在spectre中运用闭环极点法来分析运放的稳定性,在这里只调整电容的值来改变运放的稳定性, 对运放进行闭环AC和pole-zero分析,再print pole-zero summary就可以看到零极点了。下面先把图表公式全部列出来,然后再进行具体分析。 图1 常见二级运放 实数极点共轭复极点 左平面单调指数减幅(稳定)减幅震荡(可能不稳定,视情况而定) 右平面单调指数增幅(不稳定)增幅震荡(不稳定) 注释: β: 比例因子,σ / ω的绝对值 PM : 相位裕度 σ:闭环极点的实部,可以由spectre仿真得到 ω:闭环极点的虚部,可以由spectre仿真得到 公式1:u(t)= K1+K2 × exp(σt) × sin(ωt) , σ是减幅震荡的衰减因子,ω是减幅震荡的频率公式2 :ωT= 2π,T是减幅震荡的周期 公式3:σ= -1 / τ , τ为时间常数 图2 PM=45度时的阶跃响应 图3 PM=45度时的极点分布 首先来分析PM=45的情况,阶跃响应和闭环极点如图2和图3所示,系统出现了左平面上的共轭复根, 时域上出现了减幅振荡。肉眼能分辨的震荡包括三个上凸,两个下凹,最后一个上凸不很明显,合共2.5个振荡周期T,这可以说明什么呢?其实一旦出现减幅振荡,理论上再过10年,振荡也不会变为0 ,但无论是考虑到噪声也好,波形软件能够到达的精度也好,减幅振荡一旦衰减到一定的程度,例如1% ,就能够认为振荡消失了。可以尝试计算下经过一个振荡周期波形能衰减到多少。这里经过的时间为t=2.5T,由公式1 和公式2 及β=0.36 可得t=2.5T=2.5×0.36 ×2π×τ=5.7×τ , 就是说指数项经过5.7τ的衰减变为原来的exp(σ×5.7×τ)=0.3% ,这说明指数衰减到约0.3%后,减幅震荡就消失了。相位裕度