Analysis of Dynamic Positioning System Performance for a Semisubmersible Platform

Analysis of Dynamic Positioning System Performance for a Semisubmersible Platform
Lei Wang, Liang Wang, and Shi-zhi Yang
State Key Laboratory of Ocean Engineering, Shanghai Jiaotong University
Shanghai, China
ABSTRACT
This paper is concerned with a dynamic positioning system for a state of the art, ultra-deep water semisubmersible platform with 8 azimuth thrusters. The system meets the ABS class requirements for DPS-3. Hydrodynamic characteristics of the platform and the propulsion systems were measured at scale model and computer simulations were made. The correction factors to the open water thruster performance were developed from hull-thruster, thruster-thruster interactions, the forbidden zones were also provided for optimum thruster performance in the dynamic positioning control system. Thruster failure analysis is also covered and discussed. Numerical simulations were carried out for some specific examples.
KEY WORDS: Dynamic positioning system; semi-submersible platform; numerical simulation; model experiment. INTRODUCTION
Semi-submersible platforms are widely used in the exploration and development of ocean resources and many such platforms are now in operation. They are required to maintain a given position and to adjust this position under external forces of ocean current, wind and waves. With increasing depths, the conventional mooring positioned operation presents serious technical and economical limitations. A robust DP system can then improve position control ability, enhancing operational time schedule and making the operation economically feasible.
This works deals with the analysis of a Dynamic Positioning System (DPS) for a specific deepwater semi-submersible platform.
The Vessel is a four-column stabilized semi-submersible drilling vessel. The vessel is equipped with a fully redundant DPS-3 positioning system consisting of 8*4.6MW azimuth thrusters. In order to obtain accurate information of DP environmental loads, DP environmental loads on Semi are calculated and a 1:50 scaled model test was finished to prove the calculation; the wave drift force is mainly discussed, in which the calculation is based on the theory of near field integration and a new suit of measurement system is designed to fit for semi-submersible platform. Also, the effective thrust of 8 azimuth thrusters was calculated taking into interactions of current, thruster-thruster and
thruster-hull, and it reflected in the model test versus thrusters’ rpm.
The thruster interaction result in forbidden zones of 27.2 deg width,
and the zone which the thruster dependence on is labeled.
DP Capability Polar Plot and dynamic simulation are developed;
calculation and result analysis are carried out in some specific examples.
Thruster failure analysis is also covered and discussed.
VESSEL DATA
The semi-submersible platform's ' main particulars are included in the
Table 1. The draft of the semi-submerged platform is 19m.
A large scale model (Figure.1) of the vessel is constructed including
pontoons, columns, braces, and upper hull per the original arrangement
drawings.
Table 1. The detail parameters of the semi-submerged platform
Designation Unit
Fully
Model Length over all m 110.4 2.208
Width over all m 78 1.56
Elevation of box bottom m 30 0.6
Elevation of upper deck m 38.5 0.77
Length of pontoon over all m 110.4 2.208
Beam of Pontoon m 18 0.36
Height of Pontoon m 10 0.2
Length of column on pontoon m 20 0.4
Width of column on pontoon m 17.6 0.352
Corner radius of column m 4 0.08
Outer diameter of each circular cylinder
bracing
m 2.0 0.029
Elevation of each bracing above base line m 13.1 0.193
Proceedings of the Nineteenth (2009) International Offshore and Polar Engineering Conference Osaka, Japan, June 21-26, 2009
Copyright ? 2009 by The International Society of Offshore and Polar Engineers (ISOPE) ISBN 978-1-880653-53-1 (Set); ISSN 1098-618
Fig.1. Model of the semi-submerged platform
The operating sea-state for drilling operation was defined as 0.99m/s current, 25.8m/s wind (10min average) speed and waves with 5.8m significant height and 10.8 seconds zero up-crossing wave period.
THRUST SYSTEM
As already explained, the platform will be equipped with 8 azimuth ducted thrusters. For simulation purposes, a series Ka propeller with a
19A nozzle, with 3.6m diameter has been used (Table.2). The 8 azimuth thrusters model represent units with 850kN effective thrust for
the situation without current (open water thrust). A review of the locations of the azimuth thrusters is given (Figure.2); also the nomenclature of the numbering of the propellers used in this paper is shown.
Table 2. Main parameters of the ducted propeller
Propeller Ka4-70
radius 3.6m
pitch ratio 1.1
blade area ratio 0.7
Duct NO.19A
radius 3.65m tip clearance 0.025m The main requirement for the controller is the ability to keep the platform at a pre-set position during drilling or standby operation; moreover, the DPS must be able to maintain vessel positioning even in the case of failure or maintenance of one or two thrusters during operation. Simultaneous inactivity due to failure or maintenance purposes is considered for pairs of thrusters, powered by the same power plant or controlled by the same switchboard section, namely: pairs 1-8, 2-7, 3-6and 4-5.
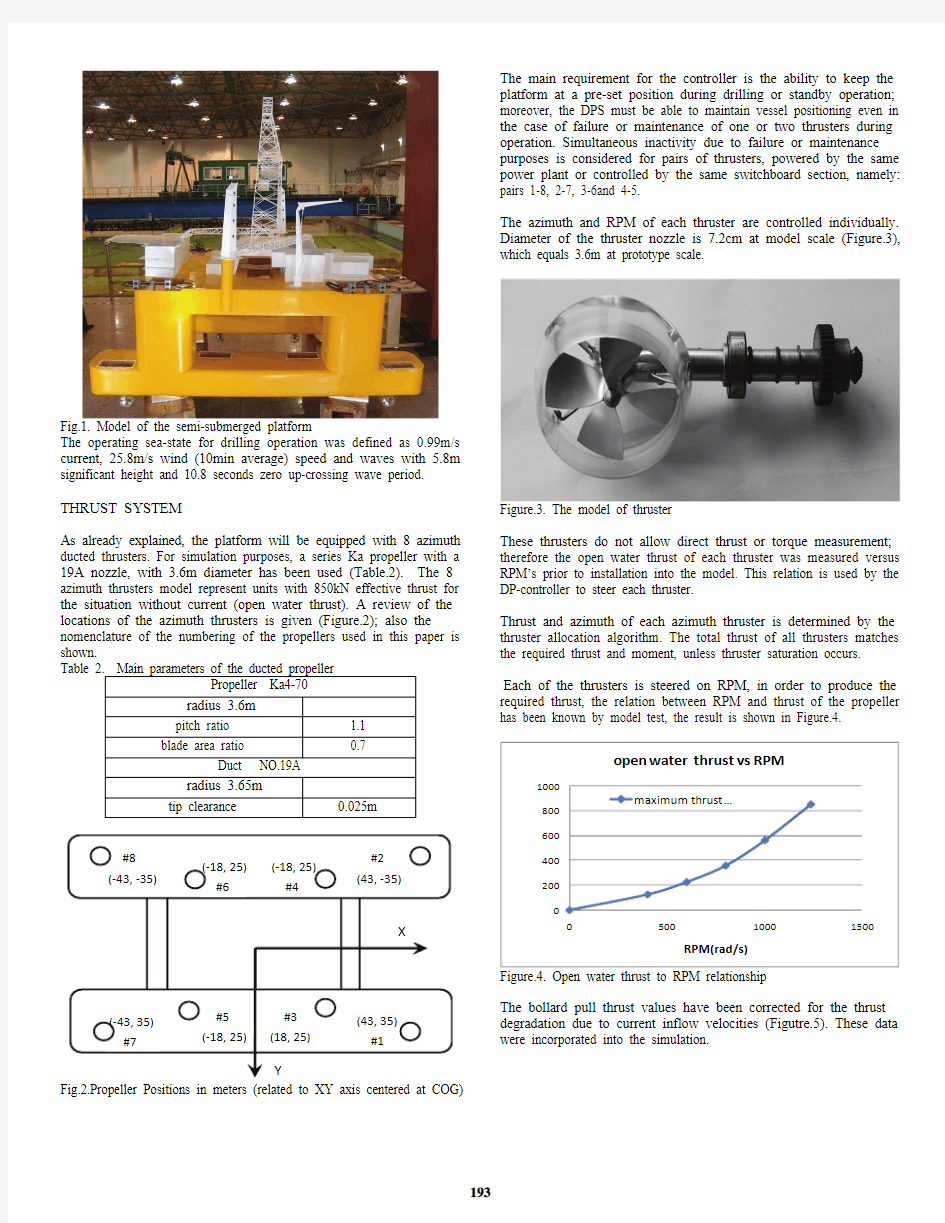
The azimuth and RPM of each thruster are controlled individually. Diameter of the thruster nozzle is 7.2cm at model scale (Figure.3), which equals 3.6m at prototype scale.
Figure.3. The model of thruster
These thrusters do not allow direct thrust or torque measurement; therefore the open water thrust of each thruster was measured versus RPM’s prior to installation into the model. This relation is used by the DP-controller to steer each thruster.
Thrust and azimuth of each azimuth thruster is determined by the thruster allocation algorithm. The total thrust of all thrusters matches the required thrust and moment, unless thruster saturation occurs.
Each of the thrusters is steered on RPM, in order to produce the required thrust, the relation between RPM and thrust of the propeller has been known by model test, the result is shown in Figure.4.
200
400
600
800
1000
050010001500 t
h
r
u
s
(
k
N
)
RPM(rad/s)
open water thrust vs RPM
maximum thrust …
The bollard pull thrust values have been corrected for the thrust degradation due to current inflow velocities (Figutre.5). These data were incorporated into the simulation.
0200400600800
10000
0.5
1
1.5
2
2.5
3
t h r u s t (k N )
surface current speed (m/s)
open water thruat vs surface current speed
maximumu thrust curve
Figure.5. Open water thrust to surface current speed relationship
Besides the thrust deductions current inflow velocities, it is noted that (Dang and Laheij, 2004) interactions among thrusters and thruster-hull are much more complicated for DPS than a normal sailing vessel or tugs. The thrusters close to the bow of the vessel will generate a water jet into the thrusters at the stern, it effectively increases the entrant speed into the downstream thrusters, resulting in thrust and torque reductions. For dynamic positioning, the thrusters are able to generate transverse thrust and also water jet in 360 deg. In many cases, there exist critical angles when the jet of one thruster will hit the other thruster with large influences. Mostly, this should be avoided. If not completely, this interaction should at least be known.
Due to the complexity of all iterations, there is still no good theory or calculation method available in order to predict the interactions accurately. In order to have an accurate prediction for interactions, model tests have been carried out. The results are shown in Figure.6.
1 &3
It is seen that the largest thrust loss due to thruster-hull interaction occurs at the situation when the thrust jet hits the vertical wall of the other pontoon. It is also seen from Figure.6 that when the water jet flows all the way from the bow to the stern under the hull bottom (at 0 deg) the thrust losses can be 18% due to mainly friction drag. When the jet is discharged close to the edge of the hull (say at 180 deg), the interaction is the lowest with a thrust loss somewhat around 10%. The largest thrust losses occur at the situation when the jet hits the other pontoon at the angle of 90 deg.
The thruster-thruster interaction is especially important in DPS, thrust loss is over 30% at some specific angles in this model test. For example, if thrusters 1 and 3 are producing thrust to stern, the downstream thruster (#3, in this case) would experience significant reduction off the beam direction, due to the wake of thruster #1 blowing into thruster #3.
In order to avoid thruster-thruster interaction, azimuth restrictions are imposed, see Table. 3. The centre angles are those of the force vectors. The ‘Thruster dep.’ (thruster dependency) column denotes the thruster on which the zone is dependent. If this particular thruster is not in use, the zone is neglected in the thruster allocation. The forbidden zones are calculated using a simple algorithm based on the results (Lehn, 1985) and were validated in model test.
Table 3. Thruster azimuth forbidden zones.
Thruster No. Zone No.
centre ψ
(deg) beam ψ(deg) Thruster dep. 1 1 -21.8 ±13.6 3 2 1 21.8 ±13.6 4 3 1 158.2 ±13.6 1 4 1 -158.2 ±13.6 2 5 1 21.8 ±13.6 7 6 1 -21.8 ±13.6 8 7 1 -158.2 ±13.6 5 8 1 158.2 ±13.6 6
ENVIRONMENTAL CONDITIONS
In order to obtain accurate information of environmental loads, environmental loads on the vessel are calculated and some tests are finished to prove the calculation.
Wind and current forces and moments associated with vessel yaw rotation were evaluated using an improved building block approach proposed by Sahin and Aybar (1984) and Walree (1991). The structure is built up of standard components with known force characteristics. Interaction effects like shielding are taken into account.
Wind load coefficients C XV , C YV and C MV are defined in the standard way by,
111222
;;126222V V V F C V F C V F C V XV a YV a MV a
ρρρ=== (1) which are presented in fugure.7. F 1V and F 2V are surge and sway component of wind force, F 6V is the yaw moment, ρa is air density; V is the mean wind velocity.
Figure. 7. Wind load coefficient
Current load coefficients (Figure.8), defined in the same way as the wind load coefficients.
111222;;126222
C C C F C C F C C F C C XC w YC w MC w ρρρ=== (2)
F 1C and F 2C are surge and sway component of wind force, F 6C is the yaw moment, ρw is water density; C is the mean wind velocity.
Figure. 8 Current load coefficient
The wave drift force (F wd ) (Figure.9~11) is mainly discussed, in which the calculation is based on the theory of near field integration (Pinkster, 1980; Huijsmans and van Walree, 1991) and a new suit of measurement system is designed to fit for the vessel.
Figure. 9 Wave-drift load confidents, surge
Figure.10 Wave-drift load confidents, sway
Figure. 11 Wave-drift load confidents, yaw
To validate the results of numerical calculations of the second order wave forces, the measurement of wave drift forces utilizing a passive
restricted system (Figure.12) proposed by Pinkster(1980).
Fig. 12. Passive restricted system
Fig.13 presents an illustrative example of such coefficients for a 45 deg wave-heading angle, 5.8m significant height of wave. Second order slow drift forces were evaluated time domain and the results are compared with the results of model tests. In this condition, the mean wave drift forces are 802.2kN (calculation) and 842.8kN (model experiment), the error is 5.06%.
Figure. 13 Results of wave drift forces of calculations and experiments.
The Pipe drag (F cp ) is defined as the current force distribution along the pipe and buffer (F cp ), induced by the relative current velocity (V C(Z)), where the relative current velocity is the pipe element velocity (V S ) relative to the surface or subsurface current velocity profile (Brink and Chung, 1981). Among the force components for the given operational and environmental requirements, the F cp and F wd are the largest force components and are in the same order of magnitude for the stationkeeping mode with no choice of headings. For the given requirements, the F cp remains the same regardless of the ship heading. The F cp values vary along the pipe length as a function of V C(Z) and the vertical variation of the subsurface water properties. The assumed mining velocity range can place the pipe drag coefficients (C D ) along the pipe near the subcritical to critical Reynolds number (Re) range. In other words, the F cp values can be quite different at an instant between the top- and bottom-end sides of the lift pipe. Furthermore, steep slope and ambiguity of the C D versus Re curve in this Re range can pose problems on accurately estimating the contribution of total pipe drag at different ship velocities to the ship thrust allocation (Figure. 2 for details) and possibly for the ship thruster control. The latter will be further discussed in conjunction with the control simulation results. If the top end of the lift pipe is connected to a point far from the ship c.g., the pipe drag vector can require significantly large restoring moment in the ship thrust allocation.
STATIONKEEPING CAPABILITY
Brink and Chung (1981) was the first one to introduce azimuthing thrusters to dynamic positioning as improvement over Glomar Explorer's fixed thruster efficiency, and the improvement of the Glomar thruster system and control logic was a guide of our work. In this paper the control mechanism of the simulation program is a feedback system using position data and includes a wind feed-forward system. Based on the position signals the total required thrust vector is determined with a PID controller:
int int
int int int int
i
tx X
X c x b x
xdt X treq e tx tx wff T T
i ty Y Y c y b y ydt Y treq e ty ty wff T T
i t N
N c b dt req e t t wff T T ψψψψψψψ=?+Δ+Δ+Δ+∫=?+Δ+Δ+Δ+∫=?+Δ+Δ+Δ+∫&&& (3)
In which X e is the average environmental force vector, T int is the integration time and Δx, Δy, Δψ are the position deviations, see Figure. 14. X wff is the wind feed forward force vector. c t, b t and i t are
Fig. 14 Sketch map of DP control
Solving the allocation of required forces (equation (2)) is a non-linear problem due to the possible presence of forbidden sectors for azimuthing angles. Furthermore, the solution of the location should be optimal in the sense of minimal fuel consumption. This is achieved by defining a penalty function which uses the square of the thrusts.
Forces in x and y direction for each azimuthing thruster is used to build a objective function:
[,,...,]
12x x x x N = (4)
where N is the number of azimuthing thrusters, x 2i-1 is the surge force of azimuthing thrusters, x 2i is the sway force of azimuthing thrusters.
And the azimuth of thruster is defined as:
2arctan(
21
x i i
x
i α=? (5)
The objective function which must be minimized is defined as:
22()()2121
N
f x x x i i
i =+∑?= (6)
The constraints can be divided in equality and inequality constrains.
The three equality equations are determined by the equilibrium of forces in the surge, sway and yaw directions, i.e. the forces of the allocation solution must be equal to the forces required by the controller:
()0121
1()0221
1()0321,21,11
N
g x X x treq i i N g x Y
x treq i i N N
g x N x l x l treq i y i i x i
i i =?=∑?==?=∑?==?+=∑∑??== (7) in which l yi and l xi are distances in x and y between thruster and rotation
center of the platform.
The first set of inequality constraints are given by the maximum power
per thruster.
()04max,1()0
3max,g x T g x T N
N ==+M
The second set of inequality constraints is given by the forbidden zones. All azimuthing thrusters may have one forbidden zone which can be chosen by the user. The forbidden zones are characterized by their lower(a l,i )and upper (a u,i )bounds. One can write these constraints as follows:
2
2
()022l u u l g αααααα+???
??
????=??≥?????
??
?The NLPQL algorithm (Lootsma, 1979) solves such constrained nonlinear programming problems.
And the stationkeeping capability of the vessel during drilling operations determines the required thruster loads at various environmental conditions - expressed in wind speed, current speed, pipe drag and wave drift forces (Srinivasan and Sen, 2003). Active thrusters as well as thrusters out of service are considered. The performance prediction is determined in accordance with the requirements of Reference 1. The DP stationkeeping capability plots are provided for the following operating modes: z I ntact System - all thrusters functional.
z Damaged System - DPS-2 (one thruster out) and DPS-3 (one
main power plant/switchboard out).
DP capability analyses are generally used to establish the maximum weather conditions in which a DP vessel can maintain its position and heading for a proposed thruster configuration. The environmental forces and moments are increased until they are exactly balanced by the maximum available thrust offered by the thruster configuration. Thus, a limiting weather condition is obtained as a combination of a mean wind speed, significant wave height and a sea current speed. Wind, current and waves are normally taken as coming from the same direction. By allowing the environmental components to rotate in steps around the vessel, the results of a DP capability analysis can be presented by means of a limiting mean wind speed for a discrete number of wind angles of attack.
The results are presented in polar plots recommended by Reference 10 (2000) indicating the required thrust levels as a fraction of the maximum available thrust as well as the required thruster torque as a fraction of the maximum allowable torque for the two groups of thrusters.
Each plot represents:
a selected environmental condition
a selected number of active thrusters (or plants powering the thrusters)
The following cases for the intact condition and failure modes were considered in the computations:
Case 1.
This is the intact case. All thrusters are available at full load. This is the
normal operating condition (Figure.15).
Case 2.
Thruster No. 2 is out (DPS-2 condition). Due to the longest moment arm, it is the most critical thruster for vessel heading control 0
10
Case 3.
One switchboard section is out (DPS-3 condition). In this mode, thrusters 1 and 8 are out (one of other switchboard sections out, is treated similarly) (Figure.17).
010
The simulation results are summarized in Table 4 showing the limiting weather conditions at the most unfavorable wind directions.
Table. 4. Limiting conditions at most unfavorable wind directions.
Case no.
Wind
direction(deg)
Wind
speed(m/s)
Current
speed(m/s)
Significant
wave height
(m/s)
1 305 31 0.99 13.1
2 70 27 0.99 10.3
3 290 25 0.99 9.7 The results of the stationkeeping capability plots lead to the following conclusions:
Intact Condition: The static holding calculations indicate that the vessel
is capable of keeping position during drilling conditions.
DPS-2 Notation: The static holding calculations for the vessel indicate that the vessel is capable of keeping station during drilling conditions after loss of a critical thruster. Hence it complies with the DPS-2 notation requirements of Reference 1.
DPS-3 Notation: The static holding calculations indicate that the vessel
is capable of keeping position after loss of one power plant during the drilling conditions. Hence it complies with the DPS-3 notation requirements.
Time simulations for a normal case (30 deg incidence) are shown in Fig. 18, the displacements in axis, as well as the reference point trace are presented. As expected, the DPS works well, presenting a motion of
CONCLUSIONS
A comprehensive and up-to-date case-study analysis of a Dynamic Positioning System to be installed in a semi-submersible platform has been successfully carried out. In order to feed a numerical simulator, a 1:50 scale model has been conducted, addressing wave forces and thrust of azimuth thrusters. Numerical simulation used a simple and validated model taking into account current (at low speed and large drift angles), waves (including current interaction) and wind forces. Thrust allocation was also implemented. Propeller failure analysis was carried out.
Two methods for DP capability analysis, i.e. DP Capability Polar Plot and DP Dynamic Simulation, are introduced, calculation models of them are developed, and calculation and result analysis are carried out in some specific examples. Based on two methods introduced above and some other factors like failure model and economic performance, the DPS complies with the ABS DPS-2 and DPS-3 requirements for drilling conditions.
ACKNOWLEDGEMENT
The model tests were conducted by State Key Laboratory of Ocean Engineering in Shanghai Jiao Tong University, and financially supported by National High Technology Research and Development Program of China (863 Program, Grant No. 2006AA09Z327). Their technical and financial supports are truly appreciated. REFERENCES
American Bureau of Shipping “Guide for Thrusters and Dynamic Positioning Systems.”
Brink, AW and Chung, JS (1981). “Automatic Position Control of a 300000 Tons Ship During Ocean Mining Operations,” Proc Offshore Technology Conf, Houston,OTC Paper 4091.
Dang, J and Laheij, H (2004). Hydrodynamic Aspects of Steerable Thrusters[C]. Marine Technology Society, Dynamic Positioning Conference.
Huijsmans, RHM and van Walree, F (1991). First Order Wave Motions and Second Order Wave Forces on Semi-submersibles[R]. MARIN: No. 49817-6-SE.
Lootsma, FA (1979). The FORTRON subroutine MINI for solving non-linear optimization problems. Delft University of Technology, Mathematics Department. July.
Lehn, E (1985). On the propeller race interaction effects. MARINTEK publication P-01.85, September.
Pinkster, JA (1980). Low frequency second order wave exciting forces on floating structures[M]. MARIN Publication. No.650.
Srinivasan, N and Sen, D (2003). Time Domain Simulation of DP Semi-Submersibles in Numerical Wave-Tank for Large Nonlinear Random Waves[C]. Marine Technology Society, Dynamic Positioning Conference.
Sahin, I and Aybar, A (1984). A Survey of Research on Wind Loads on Semisubmersibles [J]. Oceans. Volume 16.
The International Marine Contractors Association (2000). Specification for DP capability plots[M]. IMCA M 140 Rev. 1. June.
Van Walree, F (1991). Wind and Current Loads on Semi-submersibles[R]. MARIN: No.49817-5-SE.
SYS系列全程水处理器
SYS系列全程水处理器解析 全程处理器是针对工业,民用各种系统中普遍存在的四大问题:腐蚀、结垢、菌藻、水质。而利用最近的专利技术研制的综合处理器。它从根本上克服水医生系列产品“水垢净”“黄水清”“灭菌灵”“铁锈一扫净”的单一功能。使水系统处理需多种多台设备改变为单台设备即可完成综合处理。它应用航空领域的高技术——差转屏蔽效应及多点阵列组合,巧妙地解决了各种频谱间及与电晕效应场间的互相干扰、制约的重大难题,它具有对水质综合优化处理,防垢、防腐、杀菌、灭藻、超净过滤的功能,它具有机电一体化的设计,纯物理方式处理,无需化这药剂,阻力低,流量大。运行管理费用极低,操作简单,维护方便,是各用水系统最佳的选择。 SYS系列全程水处理器功效类型: 全程处理器是指该设备对不同的用水系统进行全程处理,以达到综合处理的目的。根据不同的水系统和存在的不同问题,设备分为A型、B型、C型、D型、E型、F型。 A型:防腐、除锈、脱色、超净过滤。可系统正常运行过程中完成防腐、控制二次污染、对水中的杂质进行吸附、浓缩、排污的全过程处理,使水质达标。应用系统:冷冻循环水系统、采暖循环水系统、洗浴水系统。 B型:防垢、除垢、超净过滤,可在系统正常运行过程中完成防垢、除垢、超净过滤、控制浊度、悬浮物杂质等全过程处理。应用系统:冷却循环水,工艺用水系统,洗衣机房,餐饮,各类换热设备等。 C型:杀菌、灭藻、超净过滤可在系统正常运行过程中完成杀菌、灭藻、控制二次污染、降低浊度、悬浮物、杂质等全过程处理。应用系统:采暖、空调水系统,冷却循环水,洗浴热水系统等。 D型:杀菌、灭藻、防垢、超净过滤,可在系统正常运行过程中完成杀菌、灭藻、防垢、降低浊度、悬浮物全过程处理。应用系统:冷却循环水,水质过滤,游泳池循环水等。 E型:防腐、防锈、防垢、超净过滤。可在系统正常运行过程中完成防垢、除垢、防腐、降低浊度、悬浮物、控制二次污染的全过程处理。适用于南方低硬度、低PH值、高腐蚀的水质。 F型:杀菌、灭藻、防垢、防腐、超净过滤,可在系统正常运行过程中完成防腐、防垢、杀菌、灭藻、控制水质的全过程处理。适用于中等硬度、腐蚀性的水质。 SYS系列全程水处理器工作原理: A型:水与金属接触所产生的腐蚀,从原理上讲是电化学腐蚀即“微电池效应”。全程处理器工作原理就是削弱抑制原电池效应。第一是利用特定频谱转换,依据“附肌效应”原理在水管内壁形成动态的负电荷富态层,逐渐削弱、抑制电化学腐蚀。使其腐蚀产物三氧化三铁,转换为稳态的四氧化三铁,达到以锈制锈的效果。第二是利用活性铁质滤膜,机械变孔径阻挡及电晕效应场三位一体的综合过滤体吸附,浓缩,最终排除水中的铁离子和钙离子,悬浮物、沉淀物
输液泵的操作流程
输液泵的操作流程: 1、根据医嘱在治疗室准备药液,检查药液质量、变质、变色、浑浊、瓶口有无松动、有效期,无误后锯开,安多福棉签消毒,抽吸药液,按无菌操作原则加药并混匀.在瓶签上注明姓名、床号、添加药物名称、剂量,请第二人核对,协助病人采取舒适卧位。 2、根据医嘱调节输液速度和预定输液量(按输液泵面板上的‘选择’调节)。 3、系好止血带,正确选择血管,松开止血带,安多福消毒皮肤,待干,准备好输液贴,系好止血带,再次安多福消毒皮肤,进行穿刺、正确固定(同输液操作程序)。 4、记录输液泵内药物,液体容量,输液速度 维护: 延长输液泵的使用寿命和维持其输液的稳定性请按照以下注意事项操作: 1、防止任何固体微粒进入输液泵体,因为尘埃或其它任何杂质都会磨损柱塞、密封环、缸体和单向阀,因此应预先除去流动相中的任何固体微粒。流动相最好在玻璃容器内蒸馏,而常用的方法是过滤,可采用Millipore滤膜(0.2um或0.45um)等滤器。泵的入口都应该连接砂滤棒(或片),输液泵的滤器应经常更换。 2、流动相不应含有任何腐蚀性物质,含有缓冲液的流动相不应保留在泵内,尤其是停泵过夜或更长时间的情况下。如果将含有缓冲液的流动相留在泵内,由于蒸发或泄漏,甚至只是由于溶液的静止,
就可能析出盐的微小晶体,这些晶体将和上述固体微粒一样损坏密封环和柱塞等。因此,必须泵入纯水充分清洗后,再换成适合于色谱柱保存和有利于泵维护的溶剂(对于反相键合固定相,可以是甲醇或甲醇和水)。 3、输液泵工作时要留心防止溶剂瓶内的流动相用完,否则空泵运转也磨损柱塞、密封环或缸体,最终产生漏液。 4、输液泵的工作压力不要超过规定的最高压力,否则会使高压密封环变形,产生漏液。 5、流动箱应该先脱气,以免在泵内产生气泡,影响流量的稳定性,如果有大量气泡,泵就无法工作。 输液泵产生故障,须查明原因,采取相应的措施排除故障: 1、没有流动相流出,又无压力指示。原因可能是输液泵内有大量的气体,这时可打开泄压阀,使泵在较大的流量(5ml/min)下运转,将气泡排尽,也可用一个50ml的注射器在泵出口处帮助抽出气体。另一个原因可能是密封环磨损,需更换。 2、压力的流量不稳。原因可能是气泡,需要排除,或者是单向阀内有异物,可以卸下单向阀,浸入丙酮内,进行超声清洗。有时有可能是砂滤棒内有气泡或被盐的微小晶体粒或滋生的微生物部分堵塞,这时,卸下砂滤棒浸入流动相内,超声除气泡,或将砂滤棒(片)浸入稀酸(如4mol/L硝酸)内迅速除去微生物或将盐溶解,再立即清洗。
微量注射泵的操作流程示意图
微量注射泵的操作流程 示意图 Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT
微量注射泵操作规程以及示意图 一、操作常规 (一)操作步骤 1.连接电源 2.正确安放注射器 3.按电源连接处开关键 4.显示器显示【】设置注射速度 5.接静脉通路 6.按“start”键开始自动推注。 (二)更改输液,注射速度按“STOP”停止键,按上下调节键调节至新的输液(注射)速度,按“start”键开始. (三)快速推注1.按“STOP”键暂停,按“FAST”快进两下不放,按“start”键恢复原来运行的速度.2.按“FAST”快速键同时按下“∑”不放. (四)停止输液,注射关闭电源后连接处的开关,撤除注射器,安放指定的位置、(注射泵备注:1.必须用50ml或20ml注射器。2.如要快速推注请看(三)快速推注)。 二、注意事项 (一)、整个输液环路必须密封,以免空气进入血管。 (二)、经常巡视静脉注射部位,防止液体外渗。
(三)、正确调节输液速度,并监测实际输入量与设定的输液是否一致。机器报警: 1.“OCCLUSION”阻塞报警。压力过高,查看液体有无外渗,输液管道有无折叠. 2.“”残留提示,注射器剩余左右时,发生间断性报警。 3.“EMPTY”输液完毕报警。 4.“LOW-BTAA”电源线脱落报警(残留提示及电源线脱落报警声可按消除) 三、保养维护每天用湿毛巾擦一次,每个病人用完后再抹一次并摆好。不要使用酒精等有机溶剂清洁泵,不要对泵进行高压灭菌。定期开机检查各项功能是否正常。如果有故障,应及时报修。每隔6个月或一年需要定期检查一次,确保泵的使用寿命。 四、操作流程如下: 微量注射泵的操作流程示意图
Y型过滤器与全程水处理器
Y型过滤器与全程水处 理器 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998
一、Y型过滤器 1.目数的定义:指物料的粒度或粗细度,一般定义是指在1英寸×1英寸 (×)的面积内有多少个网孔数,即筛网的网孔数。滤网目数越大,说明物料粒度越细;Y型过滤器目数越小,说明物料粒度越大。各国标准筛的规格不尽相同,常用的泰勒制是以每英寸长的孔数为筛号,称为目。例如100目的筛子表示每英寸筛网上有100个筛孔。 图1 Y型过滤器及滤网 2. Y型过滤器的目数选择 (1)网上答案:一般用于设备前起过滤作用保证设备安全,当介质为水时一般选择4-18目,当介质为蒸汽时一般选择40-90目。 (2)厂家答案:Y型过滤器是输送介质的管道系统不可缺少的一种过滤装置,Y型过滤器通常安装在减压阀、泄压阀、定水位阀或其它设备的进口端,用来清除介质中的杂质,以保护阀门及设备的正常使用。Y型过滤器具有结构先进,阻力小,排污方便等特点。Y型过滤器适用介质可为水、油、气。一般通水网为18~30目,通气网为10~100目,通油网为100~480目。 (3)规范中的答案(存在问题):《管道过滤器的设置》HG/(规范较老)中原文:“临时过滤器按结构可分为平板型、篮型、T型、Y型等。平板(多孔)型通常使用于离心泵的吸入管道上。篮型、T型、Y型通常使用于往复式压缩机或油类等粘度较大的液体的吸入管道上。临时过滤器使用的过滤网,一般选用100孔/cm2的滤网。” 经过计算可知,100孔/cm2=孔/英寸2≈645目,这个数大的离谱, 3. Y型过滤器的筛孔尺寸与标准目数对应 筛孔尺寸:标准目数:4目 筛孔尺寸:标准目数:5目
全程水处理器介绍
全程综合水处理器 全程综合水处理器 产品简介? 产品类别:产品展示-循环水处理设备 名称:全程综合水处理器 编号:ZD-50ZH 产品简介: 全程综合水处理器是针对各种循环水系统中普遍存在的四大问题:腐蚀、结垢、菌藻、水质而研制的综合水处理器。由单台设备代替了需要多台设备才能完成的处理过程,从而取代了传统的处理方式。它应用高科技—差转屏蔽效应及多点阵列组合。巧妙地解决了各种频谱间与电晕效应场间的互相干扰、制约的重大难题,具有对水质综合优化处理,防垢、防腐、杀菌、灭藻、超净过滤功能,具有机电一体化,纯物理方式处理,无需化学药剂,阻力低、流量大。而且运行费用极低,操作简单、维护方便,是各种水系统之最佳选择。 工作原理 全程综合水处理器主要由优质碳钢筒体、特殊结构的不锈钢网、高频电磁场发生器、电晕场发生器及排污装置等组成。通过活性铁质滤膜,机械变径孔阻挡及电晕效应场三位一体的综合过滤体,吸附、浓缩在实际运行工矿下各种水系统形成的硬度物质及复合垢,降低其浓度,达到控制污垢及大部分硬度垢的目的。并通过换能器将特定频率能量转换给被处理的介质—水,形成电磁极化水,使其成垢离子间的排列顺序位置发生扭曲变形,当水温升高到一定程度时,处理后的水需经过一段时间方能恢复到原来的状态。在此阶段,成垢的几率很低,因而达到控制形成硬度垢此外,全程水处理器在系统正常运行状态下,可以完成防结垢、防腐、杀菌、灭藻、超净过滤,控制水质的综合功能。 1、防垢除垢 由主机产生电磁场和超声波作用于水系统管路上,使管道内水分子产生共振,把氢键缔合的水分子团变成单个的极性,改变了水的活化性,这些极微小的水分子可以渗透、包围、溶解、去除系统中的老垢,提高了水分子对钙镁离子、碳酸根离子等成垢组分的水合能力,起到阻止水垢形成的作用。同时,在电磁场和超声波的作用下,使原有的水垢结晶逐渐变得松软、脱落、溶解,从而达到除垢之目的。
输液泵注射泵操作流程
静脉注射泵安全操作规程 1.连接电源,打开电源开关。 2.正确安装注射器(必须用50ml或20ml注射器) 3.显示器设置注射速度(用双导泵时看清设置界面) 4.将延长管连接静脉通路,再次检查有无气泡,固定好。 5.按启动键开始自动注射,观察通畅情况。 6.输注过程中经常巡视注射部位情况、用药反应,必要时根据医嘱调整输注速度。 7.出现报警声及时处理。按停止键,关机,断开输液管路。 8.停止输注, 9.擦拭注射泵,清理电源线并盘好,放于指定地点,备用。 静脉注射泵维护保养 1.使用时固定牢靠,轻拿轻放,注意散热。 2.有交流电源情况下勿用蓄电池电源。 3.使用过程中保持泵身清洁,如沾染药液等及时用湿毛巾擦拭,每个病人使用后进行擦拭干净,备用。不要使用酒精等有机溶剂消毒泵,不得高压灭菌。 4.每月检查一次,各项功能是否正常,如有故障及时报修。 输液泵安全操作规程 1.开机: 连接交流电源,打开电源开关,液晶显示屏和控制面板上的交流电源指示灯显亮(断电或使用直流电源时只有液晶面板显亮)。 2.安装输液器: 排除管内气泡,锁紧软管调节器,将输液泵墨菲斯滴管滴液检测器槽内保持垂直,然后打开泵门,依次将软管放入气泡检测槽、软管固定槽,推开止液夹放入软管后夹紧,阻塞检测槽(注意放入管子要垂直,中间不要弯曲)。 3.关门:拉起门钩,将输液泵门推进后拉下门钩,使门钩与门扣紧锁。 4.设定所需输液速度: 流速ml/h,按“▲”和“▼”键,调节输液速度。 5.预设输液量:流量: ml按“▲”和“▼”键,调节流量值。 6.按清零键: 累计输液量为零。 7.运行: 松开输液器软管调节器,按“开始”键,泵开始按设定的速度运行。 输液泵维护保养 1.使用中输液泵每日使用清水擦拭,有污染时使用500mg/L含氯消毒剂擦拭 2.输液时加强巡回,密切观察生命体征及注射部位 3.输液泵不用时需充电备用
全自动全程综合水处理器.doc
全自动全程综合水处理器 产品概述 (多相)全程综合水处理器集防垢、杀菌、防腐、除污、自动过滤等功能于一体,采用物理法对水进行处理,无需化学药剂,运行管理费用低。操作简单,维修方便,是各种水系统处理的最佳选择。 应用范围 ● 中央空调冷水机组,制冷机的冷却、冷冻循环水系统; ● 供暖、供热的热水循环系统; ● 工业、民用、工艺冷却循环水系统; ● 餐饮、地热水系统等。 原理概述 全程综合水处理器要由优质碳钢筒体、特殊结构的不锈钢网、高频电磁场发生器、电晕场发生器及自动排污装置等组成。通过活性铁质滤膜,机械变径孔阻挡及电晕效应场三位一体的综合过滤体,吸附、浓缩在实际运行工况下各种水系统形成的硬度物质及复合垢,降低其浓度,达到控制污垢及大部分硬度垢的目的。 产品特点 ● 结构紧凑,采用PLC微电脑控制,操作方式为自动运行(亦可手动运行); ● 在线过滤、反冲洗,该设备具有压差和定时自动排污及故障报警功能; ● 反冲洗时水系统压力基本保持不变; ● 滤芯使用寿命长; ● 过滤面积大、过滤速度快; ● 反冲洗用水量小。 技术参数 ①工作电源:220V 50HZ ②压力损失:0.01MPa~0.03MPa ③工作介质温度:-25℃~+105℃
④安全绝缘电压:5000V ⑤工作环境要求:-25℃~+50℃ ⑥控制腐蚀率≤0.092毫米/年相对湿度≤90% 防垢除垢效率≥95%,杀菌藻≥97% ⑦平均无故障率:不小于80000小时过滤效率≥90% 以下为选型表: 安装示意图 安装要求 全程综合水处理器安装时必须安装旁通管道,在设备前后和旁路上均要安装阀门(参照安装示意图),以便反冲复活滤体时,能使系统保持正常工作。进出水口不能装反,水流方向在设备上已经标明。 活铁滤电晕效应水处理仪可落地安装,也可架空安装(定货时需注明,根据具体情况可安装于水平管道或垂直管道上。设备顶部要求保有大于300mm的检修空间。每台设备均要求配置一个配电箱,根据设总功耗的大小,配置配电箱。
WD综合水处理器
综合水处理器 北京文仪通 产品简介 综合水处理器是集除垢防垢、杀菌灭藻、防腐、超净过滤的多种功能于一体的综合性设备,具有全过程处理功能的。可实现自动检测和控制的、能够在大口径和高负荷条件下自动切换水流方向并实现自动排污的水处理器。 综合水处理器针对各种水循环系统中普遍存在的腐蚀、结垢、菌藻、水质浊度等四大问题,应用航空领域的高技术——差转屏蔽效应及多点阵列组合,有效的解决了各种频谱间及与电晕效应场间的互相干扰、制约的重大难题,实现了对水质的防垢、防腐、杀菌、灭藻、超净过滤的综合优化处理。采用纯物理方式处理水质,无需化学药剂,阻力低,流量大,运行成本低,操作简单,维护方便。 工作原理 防垢除垢原理 水经过加温后形成水垢,其主要成分是钙、镁离子等硬度垢。但实际上还有锈垢、杂质沉积的泥垢等与硬度垢结合而形成的复合垢。全程水处理器是通过控制硬度垢和污垢两方面综合来解决复合垢的问题。第一是通过活性铁质滤膜、机械变孔径阻挡及电晕场效应三位一体的综合过滤体,过滤、吸附、浓缩其形成水垢的各种物质,降低其浓度,达到控制污垢及大部分硬度垢的目的。第二是通过换能器将特定射频能量转换给被处理的水,使其分子排列有序,阻止钙镁离子形成晶核,进而达到防垢目的。 杀菌灭藻原理 水中菌类、藻类生存繁殖需要一定的环境,全程水处理器首先通过其过滤功能使将水中的悬浮物、部分微生物、杂质进行浓缩排污、有效的降低水质浊度。使菌藻繁殖的环境恶化,达到抑制其繁殖的目的,其次利用高频波的能量来破坏菌、藻的酶系统,抑制其代谢功能,进而控制菌、藻的繁殖。 防腐过滤原理 水与金属接触所产生的腐蚀,从原理上讲是电化学腐蚀即“微电池”效应。全程水处理器的工作原理就是削弱抑制原电池效应。第一是利用特定的频谱,使水产生富态电子并依靠趋附效应在管内壁形成动态电荷涂层,进而改变金属管壁不同金属成分的电位差,切断电池电路,从而抑制电化学腐蚀。第二是利用活性铁质滤膜、机械变孔径阻挡及电晕效应场三位一体的综合过滤体过滤、吸附、浓缩,再通过反冲洗排出水中的铁、锰离子及悬浮物,降低
微量注射泵的操作流程示意图
创作编号:BG7531400019813488897SX 创作者:别如克* 微量注射泵操作规程以及示意图 一、操作常规 (一)操作步骤 1. 连接电源 2. 正确安放注射器 3. 按电源连接处开关键 4. 显示器显示【00.0】设置注射速度 5. 接静脉通路 6. 按“start”键开始自动推注。 (二)更改输液,注射速度按“STOP”停止键,按上下调节键调节至新的输液(注射)速度,按“start”键开始. (三)快速推注 1. 按“STOP”键暂停,按“FAST”快进两下不放,按“start”键恢复原来运行的速度. 2. 按“FAST”快速键同时按下“∑”不放. (四)停止输液,注射关闭电源后连接处的开关,撤除注射器,安放指定的位置、(注射泵备注:1.必须用 50ml 或 20ml 注射器。2.如要快速推注请看(三)快速推注)。 二、注意事项
(一)、整个输液环路必须密封,以免空气进入血管。 (二)、经常巡视静脉注射部位,防止液体外渗。 (三)、正确调节输液速度,并监测实际输入量与设定的输液是否一致。机器报警: 1. “OCCLUSION”阻塞报警。压力过高,查看液体有无外渗,输液管道有无折叠. 2.“NEA.EMPTY”残留提示,注射器剩余 1.5ml 左右时,发生间断性报警。 3.“EMPTY”输液完毕报警。 4.“LOW-BTAA”电源线脱落报警(残留提示及电源线脱落报警声可按消除) 三、保养维护每天用湿毛巾擦一次,每个病人用完后再抹一次并摆好。不要使用酒精等有机溶剂清洁泵,不要对泵进行高压灭菌。定期开机检查各项功能是否正常。如果有故障,应及时报修。每隔 6 个月或一年需要定期检查一次,确保泵的使用寿命。 四、操作流程如下:
物化一体全程水处理器
物化一体全程水处理器 一、产品功能 1.具有防垢、防腐、杀菌灭藻、超净过滤的综合功能,采用物理处理方式和化学处理方式相结合的综合水处理技术,辅助水质综合控制和水质动态监测等功能,实现水质全方位综合处理,水质调节、稳定控制,并可大大降低化学药剂的投加量。 2.从根本上解决了以下问题 ①物理处理方式在补水水质、循环水水质、系统工况等恶劣条件下,处理效果不显著等问题。 ②化学处理方式应用于敞开式循环水处理系统排污废水量大、补水水量大、环境污染及药剂和加药量与系统动态工况无法实时匹配的重大难题。 ③水质控制排污与截留杂质排污混为一体,排污用水量大,运行工况不稳定,水质控制难度大等难题。 3.具有净化水质,科学排污,节水、节电、节员、保护环境之综合功效。 二、适用范围 广泛应用于循环水处理系统中。 三、产品特点 1.设备采用一体化设计方式,简单实用,方便安装。 2.实现水质全方位在线监测。 四、技术参数 1.处理效果:阻构、除垢率:≥95%缓蚀率:≤0.125A杀菌率:≥80%灭藻率:≥80% 2.进水水质:总硬度(CaCO3计):≤800mg/L水温≤100℃流速≤2.8m/s工作压力:≤1.6Mpa 工作温度:-25℃~+95℃工作环境温度:-25℃~+95℃相对湿度:<95% 3.运行参数:平均无故障工作时间:>60000小时设计寿命:20年功率:180W~750W 工作电压:380V 安全绝缘电压:5000V 五、工作原理 1.防垢除垢 由主机产生电磁场和超声波作用于水系统管路上,使管道内水分子产生共振,把氢键缔合的水分子团变成单个的极性,改变了水的活化性,这些极微小的水分子可以渗透、包围、溶解、去除系统中的老垢提高了水分子对钙镁离子、碳酸根离子等成垢组分的水合能力,起到阻止水垢形成的作用。同时,在电磁场和超声波的作用下,使原有的水垢结晶逐渐变得松软、脱落、溶解,从而达到除垢之目的。 2.防腐防锈 氧化腐蚀和垢下原电池腐蚀是水系统管道及设备腐蚀和生锈的主要原因,而在电磁场和超声波的作用下,水垢得以控制和去除,溶解氧与水分子结合不易析出,从而抑制氧化腐蚀和垢下原电池腐蚀的发生起到良好的防腐阻锈的作用。 3.杀菌灭藻 电磁场在工作时产生微电子流使细菌、藻类赖以生存的环境被破坏,并且溶解氧在电磁场和超声波的作用下形成一些如O3、H2O2等对细菌、藻类具极强杀伤力的物质,起到杀菌灭藻的作用。 其一:地球上的生物一般只适应地区表面的电场强度(130V/m),该处理器改变电场强度,改变或影响细菌的生理代谢,如基因表达程序、酶活性等,最后导致细菌死亡。 其二:细胞膜有许多对外联系的离子通道,离子通道的调节直接影响细胞的功能和生命。处理器产生的外电场破坏了细胞膜上的离子通道,改变了调节细胞功能的内控电流,影响细菌的生命。同时形成强电场产生的高速运动的电子将细胞致死,达到杀菌的目的。 其三:电场处理水过程中,溶解氧得到活化,超氧阴离子自由基、羟基自由基、过氧化氢、单线态氧等活性氧。活性氧对微生物机体产生作用,造成有机体衰老,直至死亡。 其四:对高温、高湿及水质恶劣的使用环境,对菌藻滋生等要求严格但又不能加药处理时,如跟循环水直接接触的轮胎等行业;如增加“紫外线装置”,杀菌灭藻效果十分理想。 4.超净过滤 将系统监测的结果输入到控制系统,根据已经设定的电导率、TDS实现智能化、科学化排污。
物化综合水处理器
物化综合水处理器 北京柯林沃 产品简介 物化型综合水处理器是用于循环水处理的实用新型产品,它通过对水系统的综合处理,彻底解决以往化学加药处理产生的悬浮物遗留问题和物理处理方法效果不明显问题,可有效防止水系统经常出现的结垢、腐蚀、生物粘泥、悬浮物堵塞问题,是现今最有效的循环水处理设备。 “物化型综合处理器”打破了水处理技术的常规理念,采用物理方法、化学方法相结合的综合处理工艺技术,以物理场处理为主,根据系统要求、补水水质、环境、温度等技术参数,辅助以不同的化学方式,有效地控制、调节水质,可为使用单位节约大量药剂,减少运行管理费用,结合物理法和化学法处理的优势,总体运行费用是单一传统加药方法的五分之一,从根本上解决了因水质情况复杂而单一物理法设备或单一化学法设备解决不了的问题。并随设备水质综合检测仪,对水质进行连续监测、数字显示,当水质浓缩、恶化、超标时,可声光报警,设备运行灵活、方便、无需人员监守,随时监测水质实现了设备智能化全自动运行。 工作原理 通过控制系统随时分析循环水水质情况,科学定时、定量地将化学药剂加入水中,起到防垢、防腐、杀菌、灭藻作用,系统的过滤器通过在线的水质检测装置,可控制水中的悬浮物含量,并能提高水的浓缩倍数,自动启动排污装置,保证循环水系统的正常运行。 适用范围 中央空调系统循环水处理、工业设备循环冷却水处理、小区集中供热水处理、游泳池循环水处理、宾馆、洗浴热水处理、工业废水处理。 性能特点 1、利用射频物理场的防垢、缓蚀、杀菌、灭藻、超净过滤功能,辅助传统的化学处理方式, 对水系统的腐蚀、结垢、菌藻类,水质问题进行综合处理。 2、利用全程处理器三位一体的独特过滤功能,将循环水中的铁锈、杂质、悬浮物超净过滤。 3、PH值在线调节功能,使水系统中的不同金属处于腐蚀钝化区,配合物理场的缓蚀功能, 全面解决供热系统的腐蚀问题。 4、利用水质在线监测功能,通过超标声光报警,控制排污、补水,解决了水系统循环水的 水质运行稳定及监测问题,有效控制循环水浓缩倍数。 6、系统可实现定时加药、排污的自动操作,免停机维护,节省人力。 7、在线控制仪表可直接根据系统参数精确投加药量,比传统设备节约30%药量。 8、一体化程度高,整套系统通过在线仪表和加药管线连接成一个整体,设备均安装在一个 基础上,占地面积小。
全程水处理器、软水箱、落地式膨胀水箱完
全程水处理器、软水箱、落地式膨胀水箱 1、全程水处理器: SYS-250B1.0JZ/D-B 处理流量:280-440m3/h,功率:300w SYS-300B1.0JZ/D-B 处理流量:440-640m3/h,功率:330w (1)产品需具备水处理功能、水质监测功能及智能自动化运行功能,可显示水质、压力、温度等数据。 (2)产品功能包含除锈、防垢、除垢、防腐、杀菌、灭藻、超净过滤、自动排污等综合功能。 (3)产品安装方式应采用与水管法兰连接,全自动控制,电气控制部分具有3C认证; (4)设备再生滤体时,按设定时间、压差、水质自动对每个过滤体逐一进行反冲洗、排污,并确保再生滤体瞬间排污时,系统运行压力平衡稳定,排污再生滤体时总耗水量应小于总处理量的2‰。 (5)全流量过滤,滤体再生时要求必须采用滤后的洁净水反冲洗再生,不允许有不经过滤的水进入主机或系统。 (6)设备的动力执行机构应能保证设备运行稳定。 (7)产品应具备显示水质、压力、温度的能力,并具备根据时间、水质、压差三项指标,指导排污的功能。 (8)设备内部与水接触的换能器采用纯钛或陶瓷外套绝缘材料,能量转换系数高;其绝缘保护层,需采用坚硬耐磨、耐温度变化且不易老化的材质; (9)设备内部的过滤网需采用不锈钢材料制造的楔形过滤网;设备外表为漆面,防酸碱,耐高温,不脱落; (10)设备主体采用碳钢材料,罐体坚固保证强度,内涂防腐层; (11)筒体的进、出水口法兰和筒体的联接法兰及法兰盖的制造应符合国家标准。 (12)技术要求:腐蚀率:<0.089mm;防垢率:>97%;杀菌灭藻率:>98%;过滤效率:100%;过滤精度:300μm。 (13)阻力损失<0.03Mpa; (14)供货厂家提供的产品应具有国家级权威机构颁发的适用于集中空调通风系统中循环水处理的相关试验检测报告(如技术评估合格证书等)。 2、软水箱:(12#)2200x1800x1500(h) (1)水箱形式采用不锈钢保温膨胀水箱。 (2)应能依据不同场所要求任意组合成形态各异的不锈钢水箱;水箱成型后的线型流畅、立体感好、美观大方。 (3)板材选用优质06Cr19Ni10等不锈钢板材冲压制作。 (4)水箱各项卫生指标均需符合国家行业标准,通过卫生检验部门检疫。主体表面光滑耐锈,不易附生藻类,不长青苔,不渗漏。 3、落地式膨胀水箱 参数要求
微量注射泵操作流程
微量泵操作流程:1.目的 当临床所用的药物必须由静脉途径注入,而且在给药量必须非常精确、总量很小、给药速度需缓慢或长时间恒定。 2.适用范围 适用于给药非常精确、总量很小且给药速度缓慢或长时间流速均匀的情况,主要用于胰腺炎、糖尿病、高血压、休克、肝移植、肿瘤的化疗等病人。 3.定义 无 4.职责 护理人员规范使用微量泵为病人做治疗。 5.内容 5.1微量泵的用物准备:微量注射泵一台,一次性注射器(50ml),一次性输液器, 无菌棉签,砂轮,碘伏,遵医嘱所需药物,延长管(泵管/线),弯盘,启瓶器,治疗单。 5.2微量泵的操作规程: 5.2.1评估病人,了解病情,血管状况,用药情况。 5.2.2护士准备:着装整洁,洗手,戴口罩。 5.2.3遵医嘱准备药液并检查,用50ml注射器正确配制药液。 5.2.4检查连接微量泵延长管,排气。 5.2.5将注射器针筒及活塞柄置于微量泵相应的卡口上并固定。 5.2.6将用物携至床旁,核对床号、姓名,解释并取得合作。
5.2.7接通电源,打开开关,微量泵进行机内自检至显示屏无闪烁及报警。 5.2.8确认显示屏右上方显示50ml字样。 5.2.9按F功能键,设定注射速率,继续按F键及1ml键,输入注射量,再次按F 键恢复速率显示。 将微量泵延长管与静脉穿刺针相连接,按START键,开始注射。 如需改变注射速率:按STOP及C键,清除屏上显示的速率,重新输入所需速率。如需改变注射总量:按STOP—>F-->-->1ml-->C键,重新输入注射总量。 如需快速注射:不中断注射,按F键不放,同时按BOL键,此时便开始以800ml/h 速率进行快速注射。 当药液即将注射完毕时,“即将结束”键闪烁并报警,注射继续进行;药液注射完毕,机器自动停止。 取出注射器,按住电源开关3秒关机,切断电源。 整理用物,洗手并记录。 6.流程图 6.1微量泵操作流程图
全自动全程综合水处理器概述
全自动全程综合处理器是一种新型的循环水处理设备,设备采用物理方法、化学方法相结合的综合处理工艺技术,以物理场处理为主,根据系统要求、补水水质、环境、温度等技术参数,辅助以不同的化学方式,有效地控制、调节水质,可节约大量药剂添加,减少运行管理费用,结合物理法和化学法处理的优势,总体运行费用是单一传统加药方法的五分之一,从根本上解决了因水质情况复杂而单一物理法设备或单一化学法设备解决不了的问题,是现今非常高效的循环水处理设备。 工作原理 物化型全程处理器包含物理法全流量处理单元、化学法全流量处理单元、全流量过滤单元、水质保持单元及全自动控制单元组成。通过控制系统随时分析循环水水质情况,科学定时、定量地将化学药剂加入水中,起到防垢、防腐、杀菌、灭藻作用。1.防垢除垢 由主机产生电磁场和超声波作用于水系统管路上,使管道内水分子产生共振,把氢键缔合的水分子团变成单个的极性,改变了水的活化性,这些极微小的水分子可以渗透、包围、溶解、去除系统中的老垢提高了水分子对钙镁离子、碳酸根离子等成垢组分的水合能力,起到阻止水垢形成的作用。同时,在电磁场和超声波的作用下,使原有的水垢结晶逐渐变得松软、脱落、溶解,从而达到除垢之目的。 2.防腐防锈 氧化腐蚀和垢下原电池腐蚀是水系统管道及设备腐蚀和生锈的主要原因,而在电磁场和超声波的作用下,水垢得以控制和去除,溶解氧与水分子结合不易析出,从而抑制氧化腐蚀和垢下原电池腐蚀的发生起到良好的防腐阻锈的作用。 3.杀菌灭藻 电磁场在工作时产生微电子流使细菌、藻类赖以生存的环境被破坏,并且溶解氧在电磁场和超声波的作用下形成一些如O3、H2O2等对细菌、藻类具极强杀伤力的物质,起到杀菌灭藻的作用。 其一:地球上的生物一般只适应地区表面的电场强度(130V/m),该处理器改变电场强度,改变或影响细菌的生理代谢,如基因表达程序、酶活性等,最后导致细菌死亡。 其二:细胞膜有许多对外联系的离子通道,离子通道的调节直接影响细胞的功能和生命。处理器产生的外电场破坏了细胞膜上的离子通道,改变了调节细胞功能的内控电流,影响细菌的生命。同时形成强电场产生的高速运动的电子将细胞致死,达到杀菌的目的。 其三:电场处理水过程中,溶解氧得到活化,超氧阴离子自由基、羟基自由基、过氧化氢、单线态氧等活性氧。活性氧对微生物机体产生作用,造成有机体衰老,直至死亡。 其四:对高温、高湿及水质恶劣的使用环境,对菌藻滋生等要求严格但又不能加药处理时,如跟循环水直接接触的轮胎等行业;如增加“紫外线装置”,杀菌灭藻效果十分理想。 4.超净过滤 将系统监测的结果输入到控制系统,根据已经设定参数智能化、科学化排污。 适用范围 中央空调系统循环水处理、工业设备循环冷却水处理、小区集中供热水处理、游泳池循环水处理、宾馆、洗浴热水处理、工业废水处理。 四、性能特点
输液泵操作流程及维护保养完整版
输液泵操作流程及维护 保养 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
操作流程及维护保养 完善科室设备使用流程,规范设备操作,确保设备运行的可靠、安全,降低故障率,延长设备使用寿命。 二适用范围 使用科室 三操作流程 1、开机 按下电源开关,系统进行自检,先嘀的一声,报警指示灯由红到黄依次点亮再熄灭,然后嘀嘀一声,系统自检通过 2、安装输液器 1)拨开右侧门扣 2)打开门 3)向上拨开左侧止液夹扣 4)适当拉直输液器,水平对准中央管槽,放入并卡紧 5)门扣对准卡槽,按压门扣将门合上,安装完毕。 3、选择输液器品牌 在【输液器选择】界面,按上下键选择当前使用的输液器品牌,按OK键确认 4、选择输液模式 按菜单键进入【主菜单】,选择【模式选择】,按上下键和OK键进行选择,输液模式根据临床实际情况而定 5、排气 任一输液模式设置界面或暂停界面按下快进键进入【排气】设置界面,设置【排气流速】,再按住快进键进行排气,气泡排尽后松开快进键,排气完毕 6、设置输液参数 按上下键移动焦点至设置参数项,按OK键,参数项变为可调,按左右键选择编辑位,确定好编辑位后,按上下键加减数值,设置数值后,按OK键确认,设置完毕.
7、确认患者信息,连接患者 8、开始输液 连接好患者后,按启动键开始输液,屏幕显示绿色图标,箭头从右向左移动。 9、输液完成 当输液达到设置的【接近完成时间】时,触发【接近完成】报警。如不做任何处理,则持续报警至输液完成时自动解除,切换为【完成】报警,输液完成。 10、取下输液器,断开与患者连接 关闭输液器的罗伯特夹,断开与患者连接,按正确方法取下输液器。 11、关机 长按大于三秒电源键,待关机进度条完成后松开,输液泵关机。 四、维护保养 一级保养 1.每日保持输液泵,注射泵及附件表面无灰尘,无积水积液; 2.每日清洁设备,关闭电源,断开电源线,用软布或棉球蘸取适量清水擦拭表面及显示屏,放置阴凉通风处自然风干; 3.每日保证设备电池电量在50%以上,处于备用状态; 二级保养 1.医学装备科每周对设备进行巡检开机检查设备运行及功能状态; 2.医学装备科每三个月对设备进行一次全面的性能测试,包括报警系统的功能正常、电池的性能、传感器处于良好工作状态,自检功能及注射或输液功能正常,接地阻抗和漏电流符合要求;
全程综合水处理器的分类及安装注意事项
全程综合水处理器的分类及安装注意事项 全程综合水处理器是针对当今工业与民用循环水处理设备功 能单一而开发的一种综合性水处理设备。该水处理设备集防锈除锈、防垢除垢、杀菌灭藻、超净过滤功能为一体,能够有效的解决管路、换热设备腐蚀、结垢、菌藻繁殖、污泥滋生等问题,避免了水系统安装单台设备功能单一、全部安装成本高、浪费场地资源等问题。 全程综合水处理器分类 (1)全自动全程综合水处理器: 全自动全程综合水处理器是在普通全程综合水处理器的基础 之上加装压力传感器、温度传感器、电导率传感器、PH值、余氯、溶解性总固体等参数测定设备和PLC可编程控制器(部分选配),通过压差或时间控制实现在线不停机自动反冲洗、自动排污。 (2)智能型全程综合水处理器: 对于智能化操作有较高要求时,可以选用智能型全程综合水处理器,智能型全程综合水处理器具备压差控制、水质超标报警功能,智能型全程综合水处理器是在普通全程综合水处理器的基础上,增加了压差控制器和水质综合检测仪,对水质进行连续监测、数字显示;当水质浓缩、恶化、超标时,可声光报警,及时通知现场管理人员。 (3)物化全程综合水处理器: 对于高温、高湿及水质恶劣的使用环境,对菌藻滋生、结垢、腐蚀等问题要求严格时,以化学加药法作为对全程综合水处理器的补充,使用效果比单纯的物理法或化学法更好。物化全程综合水处理器是在全程综合水处理器的设备本体上增加了自动的化学加药
设备;根据水质控制的要求,可分别加入缓蚀阻垢剂、PH值调节剂、杀菌灭藻剂等;加药量仅相当于同等单纯化学加药量的10%—20%。 (4)直通型全程综合水处理器: 对于安装位置较小、过滤精度要求不高的环境,安装普通的全程综合水处理器较为困难。这时,可以选择全程综合水处理器的简易体,即:直通型全程综合水处理器。直通型全程综合水处理器的功能跟普通的全程综合水处理器完全一致,同时也可以根据使用要求增加全自动、智能型及物化等型式。 安装注意事项: (1)、为了便于设备安装检修,主体顶端与最大外径需与其他设备相距400mm以上。 (2)、禁止在无水状态下长时间开启设备。 (3)、设备应为旁通式安装,以满足在不停机状态下检修设备及反冲洗滤体的需要。 (4)、系统运行时当进出水口压差达到0.03-0.06MPa,就应进行反冲洗,新系统初次使用时,每8个小时反冲洗1-2次,正常运行后,使水质情况而定。 (5)、反洗:打开旁通阀,关闭设备进水阀及电源,打开排污阀,进行反向冲洗滤体,时间为10~20秒左右(视水质而定)。当进出水口压差恢复到原压差值,关闭排污阀,开启进水阀,关闭旁通阀,接通220V电源,使设备正常工作。 设计原则: (1)、根据设备安装点的应用系统的管径选型。设备处理水量作为参考。
全程综合水处理器说明书
全程综合水处理器说明书 全程综合水处理器是本公司针对工业及民用用水系统普遍存在的结垢、腐蚀、菌藻滋生、水质污染、重金属超标等问题,开发的新一代高效综合水处理设备。该设备利用数码射频效应场、活性过滤层及机械变径阻挡层三位一体的综合过滤、吸附体系,使一台设备具有对水质综合优化处理功能,从而达到防垢除垢、杀菌灭藻、除锈缓蚀、超净过滤净化水质的功效。具有机电一体化设计、流量大、纯物理法处理、无需添加化学药剂、操作简单、维护方便、使用寿命可达20年以上等诸多优点。 全程综合水处理器主要由射频发生器、活性过滤体、射频转换器、换能器等几部分组成。射频发生器由电源、美国进口MOTO专用集成模块、散热器等组成。 二.工作原理 1、防垢除垢: 水垢形成的主要原因是水中含有钙、镁等碳酸盐类,受热后溶解度降低,Ca2+、Mg2+等阳离子与CO3-等阴离子结合形成CaCO3、MgCO3分子,多个CaCO3、MgCO3分子通过分子间力结合在一起沉淀、吸附在用水器壁上形成水垢。在实际运行工况下,各用水系统形成的水垢,均为复合垢(硬度垢和污垢的混合物)。全程综合水处理器的设计原理就是通过控制“硬度垢和污垢”两方面综合起来解决复合水垢问题。首先通过活性过滤层、机械变径阻挡层及射频效应场三位一体的综合过滤体,来吸附、浓缩水中易形成水垢的杂质,降低其浓度,达到控制污垢及大部分硬度垢的目的。再通过射频换能器将特定频率的电能转换为被处理介质水分子的内能,水的活性大大提高,渗透力、携带力增强,从而达到除垢防垢的目的。全程综合水处理器可在系统正常运行的状态下完成防垢、除垢、脱色、控制二次污染,对水中的杂质进行吸附浓缩、排污的全程综合优化处理。 2、杀菌灭藻: 全程综合水处理器是由活性过滤层、机械变孔径阻挡层及射频效应场三位一体的综合过滤体系能滤掉水中绝大部分杂质,水的净度大大提高,这就破坏了菌藻类微生物生存繁殖的环境。高频电磁场中的高频电磁波、电场微电流及活性水分子中的电子都对菌藻类微生物有极强的杀伤力,破裂其细胞壁,并直接破坏其赖以生存的酶系统,阻止其吸收葡萄糖,停止其新陈代谢,达到杀灭去除的目的。故全程综合水处理器可在系统正常运行的状态下完成杀菌、灭藻、脱色、控制二次污染,对水中的杂质进行吸附浓缩、排污的全程综合优化处理。 3、防腐超净: 用水系统金属器壁的腐蚀,从原理上讲是“微电池效应”的电化学腐蚀。全程综合水处理器的工作原理就是削弱抑制微电池效应。第一利用特定频率转换,依据“附肌效应”原理在水管内壁形成动态的负电荷富态层,逐渐削弱、抑制电化学腐蚀。使其腐蚀产物Fe2O3,转化为稳态Fe3O4,达到以锈制锈的效果。第二利用活性过滤体、机械变径阻挡层及射频效应场三位一体的综合过滤体系来吸附、浓缩,排除水中的Fe2+、Ca2+,悬浮物、沉淀物等杂质,使水质浊度、色度降低,最终达到降低电化学腐蚀的首要条件电解质的电导率的目的。使其腐蚀速率大幅度降低。故全程综合处理器在系统正常运行的状态下能完成防腐、除锈、脱色、控制二次污染,对水中的杂质进行吸附浓缩、排污的全程综合优化处理。
注射泵操作流程 注意事项 应急预案 流程
注射泵 操作流程: 注意事项: 1.当药液在2ml 时,微量泵会自动报警,此时,可准备好另一注射器的药物。 2. 微量泵通路完全阻塞,如泵管折叠、针头阻塞时需重新穿刺,病人在躁动、咳嗽后针头容易堵塞, 堵塞后微量泵仍继续输送药液, 但并未进入血管,积聚在延长管内, 当延长管压力增加到一定限度时, 微量泵才报警,这对危重患者是不利的。 3.药液外渗:推注过程中如有外渗时微泵的报警系统不会反映,只有外渗达到一定程度产生一定阻力,才会发生报警。在使用微量注射泵时应加强巡视,出现报警应检查报警原因,针对不同原因及时处理。 4.用微量泵宜单独建立静脉通路,联合应用药时,易犯药物配伍禁忌,导致药效降低或产生毒副作用。 5.切勿在同一静脉留置针肝素帽处插入2~3个通道,避免受输液速度、压力或推药等操作影响药液持续泵入,使药物浓度忽高忽低,血药浓度受到影响,而引起病情变化,延误治疗,出现不良反应。 6.注射开始后严格无菌操作,使用24h 需更换注射器和泵管,若有污染及时更换。 7.无明显原因而出现血压、心率较大变化时, 应观察注射泵连接管、血管是否通畅,将微量泵延长管部分与正压接头处脱开, 观察连接管、血管是否通畅, 切勿在延长管部分折叠向血管内挤压, 尤其应用硝普钠时, 以免造成患者血压突然下降。
应急预案: 1、 发生注射泵故障,立即查看故障原因,做好故障排除。 2、 残留报警时,按消音键清除,提示药液残余。 3、 注射完毕报警时,按消音键清除,及时更换新的药液或停止注射。 4、 管路堵塞报警时,查看管路是否折叠,针头是否堵塞,及时排除故障或重新 注射。 5、 电源线脱落报警时,接上电源线。 6、 电池欠压报警时,可进行充电或接上电源线。 7、 若故障不能排除,重新更换注射泵,做好病人及家属解释工作。 8、 若无注射泵,汇报护士长、医生,外借注射泵。 9、 若使用了血管活性药物,护士密切观察病人病情变化,做好生命体征监测。 10、 立即通知维修组进行维修。故障仪器应悬挂“仪器故障牌” 应急流程:
多功能全程水处理器的工作原理说明
多功能全程水处理器的工作原理说明 多功能全程水处理器是针对各种循环水系统中普遍存在的四大问题:腐蚀、结垢、灭菌灭藻、超滤,而研制的综合处理器,由单台设备代替了需要多台设备才能完成的处理过程,从而取代了传统的处理方式。该水处理设备巧妙地解决了各种频谱间与电晕效应场间的互相干扰、制约的重大难题,具有对水质综合优化处理,防垢、防腐、杀菌、灭藻、超净过滤功能,具有机电一体化的设计,纯物理方式处理,无需化学药剂,阻力小、流量大。而且运行费用极低,操作简单,维护方便,是各种水系统之最佳选择。 多功能全程水处理器主要由优质碳钢筒体、特殊结构的不锈钢网、高频电磁场发生器、电晕场发生器及排污装置等组成。通过活性铁质滤膜,机械变径孔阻挡及电晕效应场高频电磁场四位一体的综合过滤体,吸附在实际运行工况下各种水系统已形成的硬度物质及复合垢,降低其浓度,达到控制污垢及大部分硬度垢的目的。 通过换能器将特定频能量转换给被处理的介质-水,形成电磁极化水,使其成垢离子的排列顺序位置发生扭曲变形,当水温升高到一定程度时,处理后的水需经过较长一段时间方能恢复到原来的状态。在此阶段,成垢的机率底,同时器壁金属离子受到抑制,对无垢系统具有防腐蚀作用。此外,电磁场化水还可有效地杀灭水中的菌类、藻类等,有效地抑制水中微生物的繁殖。所以,多功能水处理器在系统正常运行状态下,可以完成防腐、除垢、灭菌灭藻、超净过滤、控制水质的综合功能。 防垢原理: 水经加热升温后形成的水垢均为复合垢。多功能全程水处理器工作原理是通过控制硬质垢及污垢两方面来综合来解决复合水垢的问题。首先,通过活性铁质滤膜,机械变孔径阻挡层及电晕效应场三位一体的综合过滤体,吸附,浓缩其形成水垢的各种物质,降低其浓度,达到控制污垢及大部分硬度垢的目的。第二,通过换能