PSCAD的输入输出元件介绍
1.Output Channel(输出通道)
本组件可以记录或引导与之相联的信号,将信号输出到在线显示组件(如Graph, Meter, Polymeter等等),或者将信号输出到Output File中。输出得靠data label组件
输出通道接受任何形式的整数或实数性控制信号(标量或向量)。如果信号是标量,输出通道将自动调整自身信号的维度。这就允许了所有的数据向量可以直接引导输出到显示组件上,所需做的只是轻点鼠标。
2.Variable Real/Integer Input Slider(可变的实数/整数输入滑动
触头)
本组件是规格化的用户界面控制家族的一部分,用户可以通过它在仿真过程中手动的调整其输出。这一组件家族包括Rotary Switch (Dial), the Two State Switch和the Push Button.
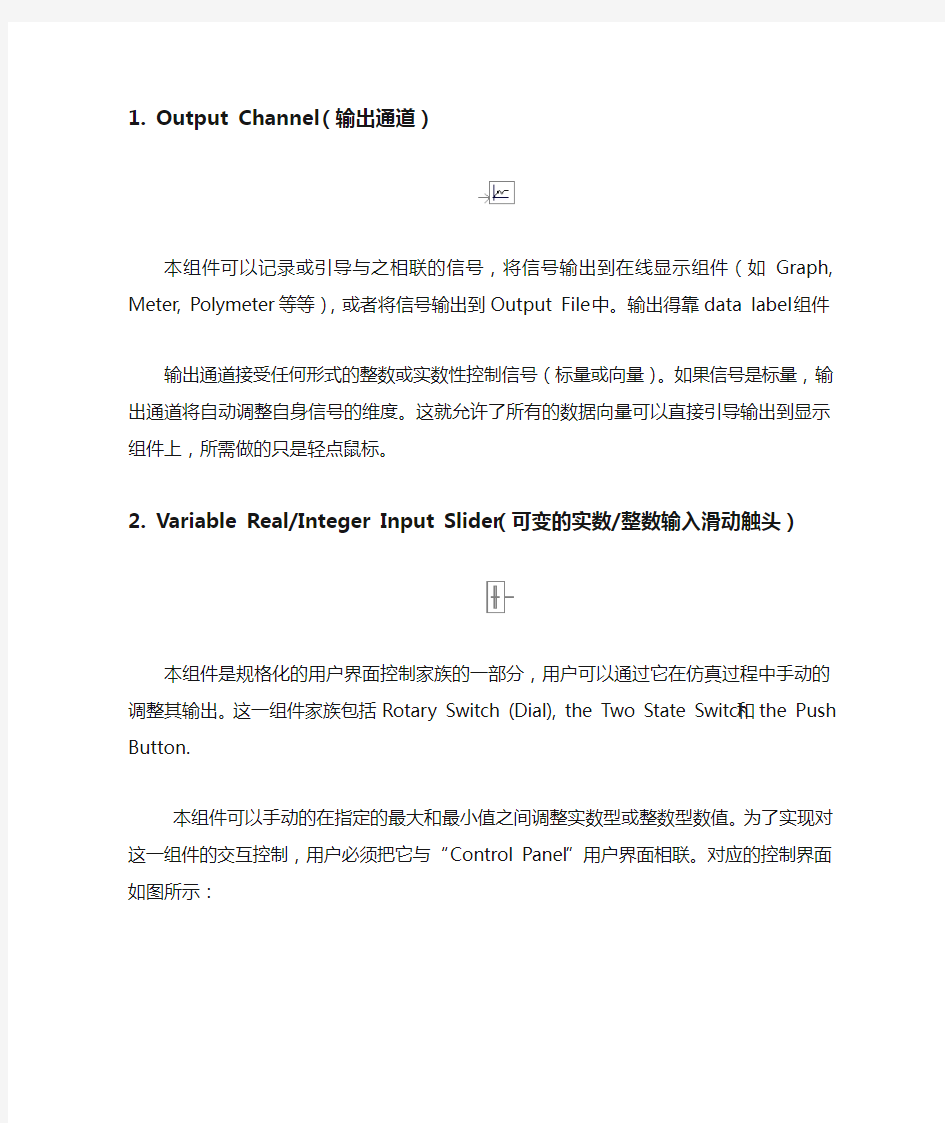
本组件可以手动的在指定的最大和最小值之间调整实数型或整数型数值。为了实现对这一组件的交互控制,用户必须把它与“Control Panel”用户界面相联。对应的控制界面如图所示:
3.Two State Switch(两状态开关)
动的调整其输出。这一组件家族包括Rotary Switch (Dial), Variable Real/Integer Input Slider 和the Push Button.
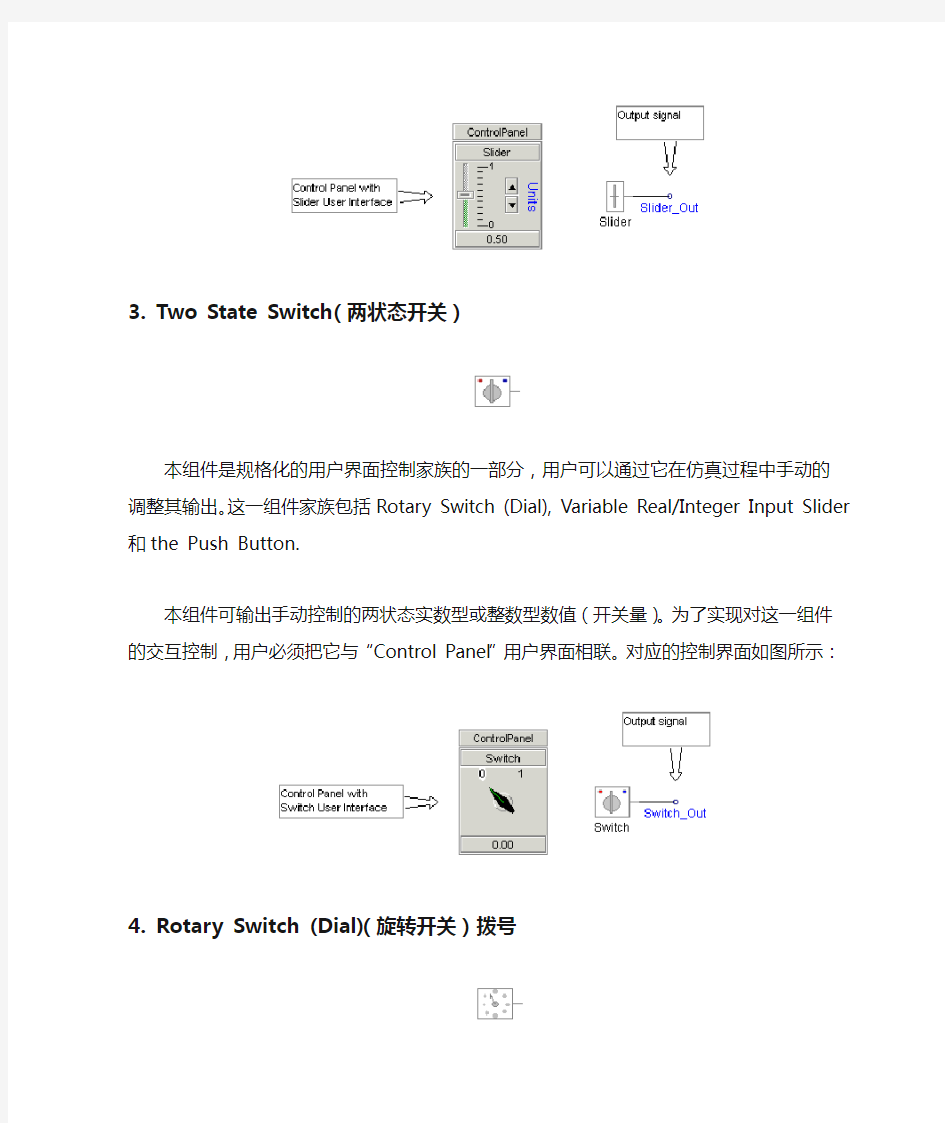
本组件可输出手动控制的两状态实数型或整数型数值(开关量)。为了实现对这一组件的交互控制,用户必须把它与“Control Panel”用户界面相联。对应的控制界面如图所示:
4.Rotary Switch (Dial)(旋转开关)拨号
本组件是规格化的用户界面控制家族的一部分,用户可以通过它在仿真过程中手动的调整其输出。这一组件家族包括Variable Real/Integer Input Slider,Two State Switch 和the Push Button.
本组件输出手动可调的实数型数据,包括3到10种常态。为了实现对这一组件的交互控制,用户必须把它与“Control Panel”用户界面相联。对应的控制界面如图所示:
5.Push Button(按钮)
的调整其输出。这一组件家族包括Rotary Switch (Dial), Variable Real/Integer Input Slider 和Two State Switch.
本组件可输出手动控制的两状态实数型或整数型(开关)数值。为了实现对这一组件的交互控制,用户必须把它与“Control Panel”用户界面相联。对应的控制界面如图所示:
6.Variable Plotstep(可变的绘图步长)
本组件可以在仿真过程中动态地改变PSCAD绘图步长。组件的输入信号是所需的多少秒的绘图步长。绘图步长应恒大于EMTDC的时间步长。
7.Vector Interlace(向量界面)
本组件将两个向量合并为一个数组输出。这一功能对合并极坐标表示的幅值数组和相位数组的非常有用,以便于将格式化的结果直接输出给组件PhasorMeter。例如,将“On-Line Frequency Scanner (FFT)”的输出结果格式化后显示,如图所示:
8.Current Run Number(当前运行的编号)
本组件专用于PSCAD的“Multiple Run”特性,给出当前运行的编号,“Multiple Run”特性可以在工程属性窗口中旋转“可用”或“不可用”。此值可用于“Multiple Run”研究的组件和控制系统的直接输入。此组件可以和“Total Number of Multiple Runs”组件一起使用。
9.Total Number of Multiple Runs(多路运行的总数)
本组件专用于PSCAD的“Multiple Run”特性,给出多路运行的总数,“Multiple Run”特性可以在工程属性窗口中旋转“可用”或“不可用”。此值可用于“Multiple Run”研究的组件和控制系统的直接输入。此组件可以和“Current Run Number”组件一起使用。
10.Multiple Run(多路运行)
本组件用来控制多路运行,控制变量从一路运行转入下一路。所控制的变量是组件的输出(最多六个输出),可以与其它任何PSCAD组件相联。本组件对每一运行最多可记录六路数据。举一些多路运行的例子如下:
●改变故障时间和角度,来寻找最严重的过电压;
●修改控制器的增益,寻找对扰动最好的响应;
●逐步改变一定范围内的RLC或系统参数以决定最优值;
●改变故障类型和位置。
本组件有以下输入和输出:
●Meas-Enab:用于开通(1)或中断(0)通道记录功能;
●Ch. 1 ... Ch. 6:要记录的信号输入;
●V1, V2 ... V6: 组件控制的输出变量
输入信号和输出信号的值可以保存在多路运行输出文件中。对每一个信号都可以自动的进行处理(像求最大和最小)。另外可以设定一最优运行标准,此运行将作为最后运行反复进行和显示在屏幕上。这样的标准如下:
●三相母线的最大过电压;
●浪涌避雷器的最大能量;
●信号测量值与控制器给定值的最小误差。
注意:对以上所提到的监控会对每一输入、对每一运行保存单一数量。也可以使用“Output Channel”组件保存每一运行的全部时间段的波形。
11.Optimum Run(最优运行)
本组件可以视作另一类型的多运行元件,类似与“Multiple Run”组件。最大的不同就是本组件寻求(或接近)了最优设计参数。优化运行的方法可以通过极大地减少运行数量来节省大量时间,还可以提高精度,因为其结果接近了准确的设计点。
优化算法有以下这些选择:
1.黄金分割:适合优化单一的实数型变量。黄金分割点在简单几何图形中使用距离比
例时经常用到;
2.单纯形:适合优化数个(最多20)实数型变量。本方法是沿着可视化实体的边缘寻
找最优解;
3.Hook-Jeeves(模式搜索法):适合于数个实数型变量的优化;
4.遗传算法:适合于优化数个实数型/整数型/逻辑型变量。是一种适应性随机优化算
法,包括搜索和优化。
不管选用哪种优化算法,都需要一个用户定义的目标函数作为输入信号。根据这个函数的值,优化算法将会为每一运行决定一个新的输出参数的集,从而比较目标函数的值与输入偏差之间的误差。如果目标函数的值低于规定的偏差,则多路运行停止。
输出信号是一数组,其维数由组件内部定义。