SMART-S Mk2
https://www.360docs.net/doc/f39166561.html,
radar, is optimized for medium-to-long range air and surface surveillance and target designation. This state-of-the-art radar is an excellent performer in complex littoral environments with their mix of sea, land, rain, thunderstorms and targets such as multiple small surface ships, helicopters and anti-ship missiles. The detection range allows the full performance of new medium-range SAM-systems such as ESSM. Graceful degradation through the use of multiple solid state
transmit modules and multiple receive channels ensures robust performance throughout the spectrum of military operations.
Through the use of Doppler processing SMART-S Mk2 can detect even the stealthiest of targets in a cluttered environment by measuring radial speed directly. As a multibeam radar SMART-S Mk2 offers the long dwell time per target required for good radial speed measurements.
SMART-S Mk2 is an optimal sensor for target indication to a ?re control tracking system. By providing 3D tracks the radar supports correct classi?cation and rapid
acquisition. The elevation accuracy is high (even in case of multipath by using receive beams below the horizon) and suited to directly launch ?re and forget missiles. SMART-S Mk2 is well suited for detection of helicopters due to dedicated rotor hub detection capabilities. For guidance of helicopters and UAVs it can use very short pulses, providing a short minimum range.
support maintenance free missions.
This is achieved by reducing single points of failures (graceful degradation), high MTBF per component, low MTTR and solid-state transmit modules.
SMART-S Mk2 is easy to install on board. The antenna uses electronic stabilization. The solid state transmit modules are integrated in the antenna meaning no separate transmitter cabinet and waveguide are required. Foot print reduction is
achieved through the use of powerful processing boards housed in a single processing cabinet. The total system weight is comparable to that of 3D G-band radars!
Main characteristics
? Excellent performance in the Littoral environment ? Supports full performance of ESSM
? Solid State Transmitter integrated in the Antenna ? Low antenna sidelobes
? Very small below deck footprint; just 2 small sized cabinets ? Easily integrated with many CMS systems, both Thales and non-Thales
? Short-range capabilities for surface detection, helicopter and UAV control
? IFF antenna and optional integration with IFF system.
S M A R T -S M k 23D M e d i u m -t o -l o n g r a n g e s u r v e i l l a n c e r a d a r
T H A L E S N E D E R L A N D B .V . a n d /o r i t s s u p p l i e r s . T h i s i n f o r m a t i o n c a r r i e r c o n t a i n s p r o p r i e t a r y i n f o r m a t i o n w h i c h s h a l l n o t b e u s e d , r e p r o d u c e d o r d i s c l o s e d t o t h i r d p a r t i e s w i t h o u t p r i o r w r i t t e n a u t h o r i z a t i o n b y T H A L E S N E D E R L A N D B .V . a n d /o r i t s s u p p l i e r s , a s a p p l i c a b l e .D a t a o n t h i s s h e e t m a y b e s u b j e c t t o c h a n g e w i t h o u t n o t i ?c a t i o n . D S .048/01/08/H
Functional Aspects
? 3D Air Surveillance with Fast Target alerts ? Surface Surveillance
? Surface Gun Fire Support ? Jammer Surveillance ? IFF Interrogation Support
Performance Data
? Maximum Instrumented range : 250 km ? Maximum elevation coverage : 70 degrees ? Minimum Range : 150 meters ? Tracking 3D capacity (Air+Surface) : 500 targets ? Surface Fire Control Windows : 3? Elevation accuracy : < 10 mrads ? Bearing accuracy : < 5 mrads ? Range accuracy : < 20 meters ? Detection performance: Small missile : ~ 50 km MPA : ~ 200 km
Technical Data
System:
? Two operating modes: medium range up to 150 km at 27 RPM and long range up to 250 km at 13.5 RPM ? Fully automatic detection and tracking.? Dedicated ECCM techniques.Antenna:
? Horizontal beamwidth : approx. 2 degrees
? Illumination patterns : Wide beam and Narrow beam ? Antenna rotation speed : 13.5/27 RPM ? Stabilisation : electronic
? Very low sidelobes ? Integrated IFF antenna
Transmitter:
? Frequency band : E/F-band (excl. ATC and communication bands)? Type : Solid State transmit modules integrated in Antenna ? Transmitting modes : sectorwise reduced or full power ? Broadband frequency operation and frequency agility Processing:
? Digital beamforming, resulting in 12 simultaneous receive beams
? Multipath suppression using a beam under the horizon ? Digital pulse compression
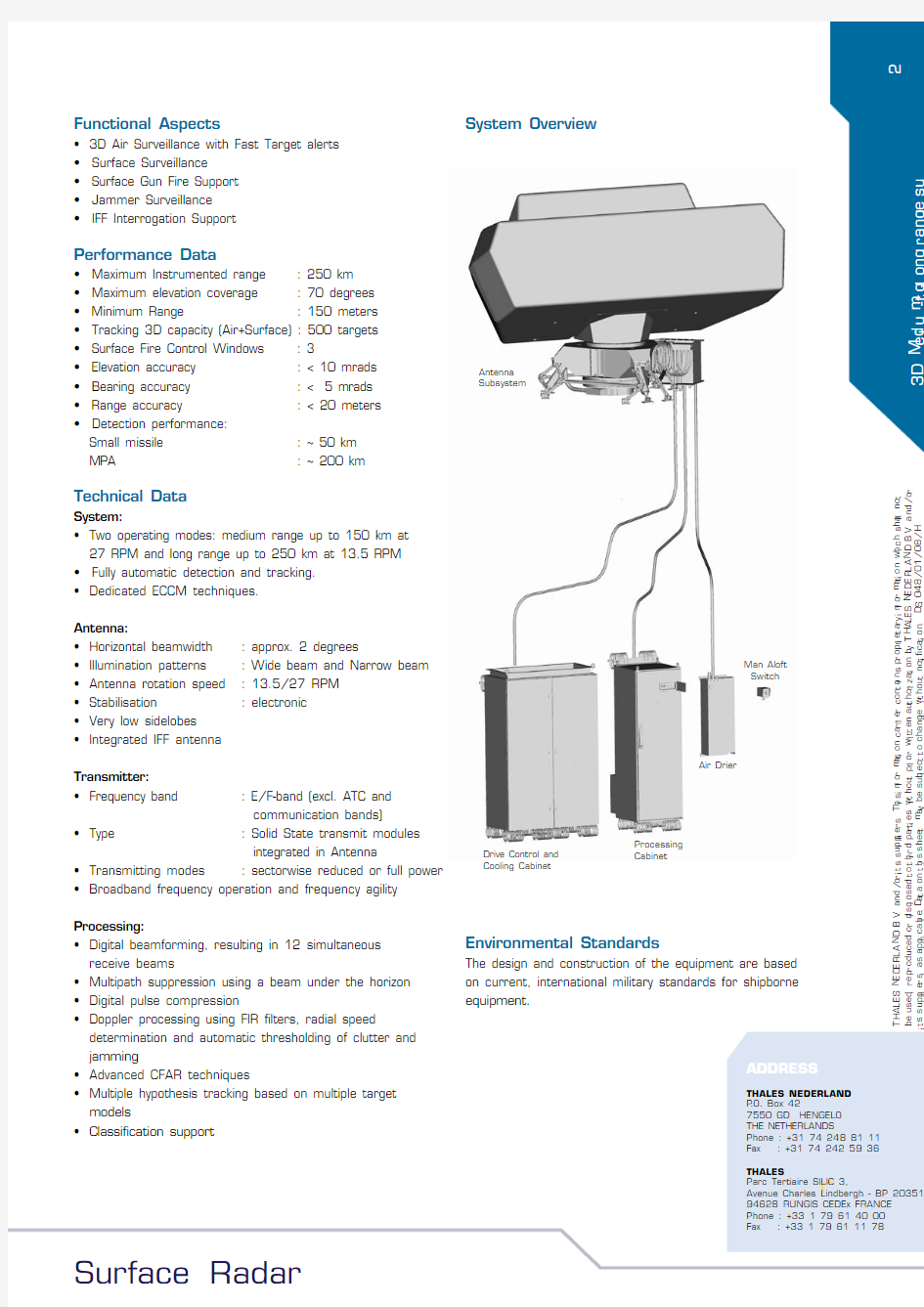
System Overview
Environmental Standards
The design and construction of the equipment are based on current, international military standards for shipborne equipment.
Antenna
Subsystem
Processing Cabinet
Air Drier
Man Aloft Switch
Drive Control and Cooling Cabinet
电罗经习题集
<题目>高速旋转的三自由度陀螺仪其 进动性可描述为( )。 A.在外力的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力方向 B.在外力矩的作用下,陀螺仪主轴的动量矩矢端力图保持其初始方位不变 C.在外力矩的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力矩 D.在外力矩的作用下,陀螺仪主轴即能自动找北指北 <参考答案>c <题目>何谓自由陀螺仪( )。 A.重心与其中心相重合的三自由度陀螺仪 B.主轴可指向空间任意方向的陀螺仪 C.不受任何外力矩作用的平衡陀螺仪 D.高速旋转的三自由度陀螺仪 <参考答案>c
<题目>从工程技术角度,陀螺仪的定义为( )。 A.高速旋转的对称转子及保证转子主轴指向空间任意方向的悬挂装置 B.转子及其悬挂装置的总称 C.具有三自由度的转子 D.高速旋转的对称刚体 <参考答案>A <题目>何谓陀螺仪的定轴性( )。 A.其主轴指向地球上某一点的初始方位不变 B.其主轴动量矩矢端趋向外力矩矢端 C.其主轴指向空间的初始方向不变 D.相对于陀螺仪基座主轴指向不变<参考答案>c <题目>三自由度陀螺仪在高速转动时,其主轴将指向( ),若在垂直主轴方向上加外力矩,主轴将( )。
A.空间某一方向,产生进动 B.真北,指向真北 C.空间某一方向,保持指向不变 D.A和C对 <参考答案>A <题目>满足下列( )时,陀螺仪才具右定轴性。 A.高速旋转 B.陀螺仪中心与其重心重合 C.不受任何外力矩 D.A+B+C <参考答案>D <题目>在垂直于陀螺仪主轴方向上加外力矩,陀螺仪主轴将产生进动,其进动角速度( ) A.外力矩成正比,动量矩成正比 B.外力矩成反比,动量矩成反比 C.外力矩成正比,动量矩成反比
控制卡设置教程1(卡乐控制卡)(1)
控制卡设置教程1(卡乐控制卡) LED显示屏的控制卡有多种品牌和产品,但是控制卡的设置小异,这里以"卡乐"控制卡为例。(“卡乐”控制卡通常以X开头,比如:X2S、X3S、X4E、X8等) 第一步:打开软件,设置屏体参数。(如要求输入密码,密码为:168) 第二步:选择卡的型号,宽度和高度,单元板类型。(宽度和高度,是指单元板横向与纵向的发光点数) 屏幕宽度和高度如何计算? 这里的宽度和高度,并不是用卷尺实际量到的尺寸。 我们看到下面这P10单元板的图,高度上有16个像素点,宽度上有32个像素点。 如果你所购买了一块屏,共有30单元板组成这块屏。高度上有3,宽度上有10,那么高度:16×3=48,宽度:32×10=320。但如果是室单元板的话,
那么一单元板高度上有32个像素点,宽度上有64个像素点。 1.户外P10单元板:宽度:32,高度:16(其中数字10表示:点与点之间的间距是10mm) 2.室F 3.75单元板:宽度是:64,高度是:32(其中数字3.75表示:每个发光点的直径是3.75mm,并不是点与点之间的间距)
第三步:单击“字幕”,会在节目1的下面增加了字幕1,同时在右边看到了一个绿色的框,拖动绿色框的右边线,把这个框拉到与黑色的区域一样大。下面的放大镜,可以放大或者缩小这个区域,方便观察。 第四步:输入文字,选择合适的字体、字号大小、上屏方式和速度。选择“预览”看一下走字的效果。如果效果不好,再点一下“停止”,重新设一下上屏方式和速度。调整字的大小时,大小与绿色的框差不多高就可以了。(注:预览时
走字的速度与实际屏上的速度有差别) 第五步:选择"USB",导入到U盘。最后拔出U盘,插上显示屏上,通常会出现“成功拔出U盘"等字样,表示导入数据成功,拔出U盘即可。 常见问题: 1、导入到U盘以后,出现提示:节目1:含有重叠区域。
运动控制卡英国翠欧TRIO-入门
目的 通过阅读本手册,让刚刚接触TRIO运动控制器的客户可以从用途、系统构架、TRIO 在系统中的作用以及软、硬件有一个初步的了解。其中最主要的是,通过本手册一定要让用户能够自己搭建一个简单的控制系统,能用Motion Perfet与控制器、电机连接起来,对电机进行一些简单的操作。为用户未来使用TRIO运动控制器开发项目打下基础。 1用途 1.1 应用领域 TRIO运动控制器主要应用在工业控制领域,可以对伺服,步进,变频器等进行控制。其特点是指令简单,完成复杂的多轴协调运动,只需几条简单的指令就可以完成。 1.2 应用实例 2 运动控制系统构架 2.1 组成 2.1.1 运动控制系统概念 运动控制是指在一定的环境中,根据给定的条件,将预定的控制方案、规划指令转变成期望的机械运动。实现对被控目标机械部件精确的位置控制、速度控制、加速度控制、转矩或力的控制,以及这些控制的综合控制。 当今的运动控制,由于环境条件的复杂,使得控制方案,数据也显得越来越复杂,这样,实际中要想完成预定的动作,实现准确的运动控制,更多的依靠大型的运动控制系统。 运动控制系统包括处理运动算法和信号的控制器、增强信号,可供应运动控制器提供运动输出的放大器、执行机构、反馈系统(传感器/变送器),可基于输出和输入的比较值,调节过程变量。有的系统还包括操作员界面或主机终端前端处理设备。
2.1.2 运动控制系统框图 2.2 各部分功能 人机交互:一般由上位机或触摸屏完成人机交互功能。其作用主要有两点: 1. 参数初始化 这一过程是每一个控制系统都必须做的工作,所设计的系统主要根据这里下载的参数进行工作。相当于告诉系统一个运动规则。 2. 监控系统运行 也是一参数的形式报告系统当前运动状态,包括系统是否运行指定动作、运动过程中是否出错、运动进行的进度等等。 运动控制器 控制器是整个系统的核心,其功能主要是接收运动控制信号及参数,做出运算,把控制输出送到相应的驱动器或执行器。 一、运动参数,控制信号的获取 要完成一定规律的运动,必须要有一定的参数作为前提,比如速度、距离、哪一轴等,这些参数一般由上位机,或触摸屏传送到控制器中。控制信号包括各种限位,手自动转换等,这些信号一般通过数字量输入,或模拟量输入,传送到控制器内部。 二、对运动参数的运算 一般客户传送到控制器内部的参数都是比较直观的参数,这些参数还不是控制器赖以使用的实际参数,这就需要做一些转换运算,这些也是在控制器内的运算子程序中完成的。 三、运动控制 当控制器得到足够的参数后,会根据这些参数和客户编制的运动控制程序,对机械部件发出指令,控制其运动。 四、接收反馈,监控运动执行情况 在控制器发出运动指令后,会根据反馈回来的信号,对运动执行情况作出判断和调整。 五、上传监控信息
控制卡级联设置和详细说明
控制卡级联设置及详细说明 Visiom show A型控制卡具有机联功能,当您的显示屏高度或宽度,超过一张控制卡所带的范围,可采用级联的发法解决。 级联使用时,可设一块控制卡为主卡,其他控制卡设为子卡,每块子卡要和主卡通讯。当您的控制只有两块时,可采用RS232通讯或RS 485通讯,控制卡超过两两块时,只能采用RS485通讯。在级联使用时,主卡和子卡都要和计算机通讯。如果用RS485做卡与卡级联,则控制卡和计算机之间通讯只能选择网络通讯。 下面以1/16扫面方式为例详细说明,其他扫描方式相同。 级联模式A: 此方法只能用于两块控制卡级联,控制卡之间采用232通讯,控制卡和计算机用485通讯,在使用是,两块控制卡所带的屏体点数尽量均分。 1.连接示意图 图JLA-1 2.参数设置 假设屏体高度为256点,宽度为4096点。我们设置主卡和子卡所带屏体宽度分别带2048点。 (1)、以正常的方式与每块控制卡建立通讯,假设先与主卡建立通讯,在与主卡建立通讯时要把子卡上的485通讯线拔下。在vision show软件的子菜单中选择系统设置/控制卡设置,或单 击工具按扭进入控制卡设置界面,首先选择“基本设置”选项。
图JLA-2 (2)在基本设置中设置完主卡硬件地址和宽度参数后,选择“级联参数”选项进行级联参数设置。 图JLA-3 控制卡级联类型选择“作为主控”,级联通讯方式选择“RS232级联”, X和Y坐标设为0,0。主卡级
联参数设置完毕,记住所设参数,单击“设置参数”按钮,将所设置的参数保存报控制卡。 (3):拔下主卡上的485通讯线,插上子卡上的485通讯线,进行子卡级联参数设置,设置方法和主卡相同。首先设置基本参数,界面如下: 图JLA-4 (4)接着设置子卡级联参数,界面如下:
电罗经
电罗经是根据陀螺原理制成的,根据陀螺在不受外力的作用下,保持空间指向不变的原理,制作成电罗经,电罗经的标准学名是陀螺罗经,只不过用电,大家就叫它电罗经。陀螺罗经在启动的时候,其指针指北,之后便一直指北,如果偏离指北,在重力的作用下,自动修正指北。根据陀螺马达数量及支撑马达的系统分为三大系列。分别是安修斯,斯伯列,阿芒.勃朗。一个陀螺马达及液体支撑马达的是安修斯,两个陀螺马达(马达轴向成直角)及液体支撑马达的是斯伯列,一个马达及没有液体支撑的是阿芒.勃朗。不管什么牌子、什么型号,基本上是参照这三个系列来制造。电罗经不受磁场的影响,但只能在南北纬70度以内使用,南北两极就不能使用。 关于电罗经和磁罗经电罗经(GYROCOMPASS) 有主罗经(mast gyro)、分罗经(repeater)、控制箱(control unit)以及航向记录仪(course recorder)组成。 由于船舶电罗经和自动舵基本都是配套由同一个厂家提供,主罗经的安放位置一般有如下几种方式。 1。内置式 主罗经build-in自动舵内。控制箱可以拆分后同样安装在自动舵内主罗经两侧,或者安装在驾驶室后壁。 2。放在专门罗经房 主罗经放在专用罗经房内。罗经房一般在驾驶台同层或者下一层居多。有甚者在下两层。3。分离式 主罗经放置在报房或者驾控台内部(一般这种情况,大多数自动舵也为分离式)。 现今常见的电罗经产品: 1。日本产yokogawa cmz-xxx x系列(xxx表数字,如500,700,后一个x表类别,s表单套,d表双套)。陀螺球浮于专用液体中。液体由苯甲酸,甘油,蒸馏水按照3.2g,145ml,1.6l配比混合。 2。日本产tokimec TG-XXXX x系列(x表意同前)。干球,无液体。 3。德国产retheon anschtuz std-xx (x表意同前)系列。陀螺球浮于专用液体中。配方记不住就不写了。 4。其他 如c-plath,sperry等产品相对来说用的和见的都比较少。 磁罗经(magnetic compass) 一般船舶都配备两个,一个主用,放在罗经甲板;一个备用。 用途 相比磁罗经,电罗经具有精度高,误差小等优点。尤其和配合自动夺使用自动操舵功能后,可大大节省驾驶员的时间和精力。
仰邦WIFI无线控制卡 使用说明
仰邦WIFI无线控制卡使用说明 1.1 工作模式 BX-5A1&WiFi、BX-5A2&WiFi、BX-5A4&WiFi等控制器支持通过BX-WiFi模块的TCP/IP协议通讯实现LED显示屏的播放节目更新。其工作模式有“单机直连(AP 模式)”、“固定IP(Station/STA模式)”两种连接模式。 1.2 设置方法 BX-WiFi模块的参数不在LedshowTW 2012软件中设置,需使用“Internet Explorer”来手工设置。 初次使用或处于复位状态的BX-WiFi模块可先将计算机的IP信息设置为“自动获得IP地址”,然后计算机先查找到并连接带有“BX-WiFi”字符串的无线网络后,然后在“Internet Explorer”地址栏中输入“http://192.168.100.1”可直接进入BX-WiFi参数设置界面。 注意:默认账号:admin;默认口令:888。 2 单机直连(AP模式) 单机直连模式主要用于不需要在复杂网络环境的单个显示屏应用。单机直连模式是直接将BX-WiFi控制器与计算机之间直接用无线WiFi连接。该模式下,BX-WiFi 作为一个无线路由器。计算机主动去连接BX-WiFi无线网络后再与控制器通讯。该模式下与控制器通讯的计算机需配置有无线网卡。 2.1 简单设置 如果用户对设置BX-WiFi没任何要求的话,用户可以直接使用。BX-WiFi出厂默认的无线WiFi网络名称为“BX-WiFi-B045031206190037”,IP地址为 “192.168.100.1,发送端口为5005。”其中“B045031206190037”为BX-WiFi 控制器背面的唯一出厂序列号。计算机无线网卡的IP信息设定为“自动获得IP 地址”,DNS设置为“自动获得DNS服务器地址”方式 (如图1)。 图1 单击计算机任务栏的右下角的无线网络图标,弹出 (如图2),选中无线网络。连接完成后,查看当前无线网络状态,如果当前计算机的网络连接状态为
翠欧控制卡入门手册-MC206X-学习..
目的 (2) 原则 (2) 内容 (2) 1 用途 (2) 1.1 应用领域 (2) 1.2 应用实例 (3) 2 运动控制系统构架 (3) 2.1 组成 (3) 2.2 各部分功能 (4) 3 配线 (6) 3.1 MC206X介绍 (6) 3.2 供电 (9) 3.3 控制器、驱动器配线 (9) 3.4 孔制器、上位机连接 (12) 4 软件编程 (12) 4.1 支持软件使用 (12) 4.2 简单运动指令举例 (27) 4.3 简单运动控制程序举例 (34)
目的 通过阅读本手册,让刚刚接触TRIO运动控制器的客户可以从用途、系统构架、TRIO 在系统中的作用以及软、硬件有一个初步的了解。其中最主要的是,通过本手册一定要让用户能够自己搭建一个简单的控制系统,能用Motion Perfet与控制器、电机连接起来,对电机进行一些简单的操作。为用户未来使用TRIO运动控制器开发项目打下基础。 原则 简单、实用、图文并茂。 内容 1 用途 1.1 应用领域 TRIO运动控制器主要应用在工业控制领域,可以对伺服,步进,变频器等进行控制。其特点是指令简单,完成复杂的多轴协调运动,只需几条简单的指令就可以完成。
1.2 应用实例 2 运动控制系统构架 2.1 组成 2.1.1 运动控制系统概念 运动控制是指在一定的环境中,根据给定的条件,将预定的控制方案、规划指令转变成期望的机械运动。实现对被控目标机械部件精确的位置控制、速度控制、加速度控制、转矩或力的控制,以及这些控制的综合控制。 当今的运动控制,由于环境条件的复杂,使得控制方案,数据也显得越来越复杂,这样,实际中要想完成预定的动作,实现准确的运动控制,更多的依靠大型的运动控制系统。 运动控制系统包括处理运动算法和信号的控制器、增强信号,可供应运动控制器提供运动输出的放大器、执行机构、反馈系统(传感器/变送器),可基于输出和输入的比较值,调节过程变量。有的系统还包括操作员界面或主机终端前端处理设备。 2.1.2 运动控制系统框图
洗板机应该怎样正确操作和维护
洗板机应该怎样正确操作和维护 洗板机(全自动洗板机)是用于清洗酶标板的仪器,许多用户在买回去以后只顾着用洗板机清洗酶标板,却没有注意洗板机的正确使用和洗板机的维护保养,导致新选购的洗板机没用多久便已损坏。洗版机的正常使用可保证仪器不易损坏,而且还可以延长使用寿命. 洗板机的正确操作方法步骤如下: 第一步、开机:首先当然是要插上电源线,然后打开仪器开关,保持在开机状态。 第二步、换液:选择冲洗栏内的换液键(换液时不要打开转换开关),把洗板机的蒸馏水换成洗液,完了之后返回主菜单。 第三步、复位:把要洗的酶标板轻放入托盘内,酶标板要放平稳,然后按暂停键加左移键,使洗板机自动返回初始状态,(这个时候不要再动托盘)。 第四步、洗板:根据个人需要选择所需的洗板程序,选好后,光标返回洗
板栏内,按回车键即可进行洗板。 第五步、冲洗:用户在每天使用洗板工作完毕后,选择冲洗栏内的冲洗键即可进行冲洗,之后把洗板机内部的洗液转换成蒸馏水,完毕之后返回主菜单。 第六步、关机:最后一步就是关闭仪器开关,拔下电源线。 洗板机的维护: 一、洗板机平常不用闲置时,应保持仪器是断电状态。 二、每次使用完洗板机之后,应对仪器其进行清洁,包括内部清洁和外部清洁,用湿抹布擦洗洗板机的外壁及载物台,保持洁净。 三、用蒸馏水把仪器所有的管道清洗一遍,以免仪器管道堵塞。 四、应及时倒弃废液,保证废液瓶内废液不会溢出,若废液过满会导致废液回流而造成洗板机的故障。 五、保证待洗的反应板的孔边缘不要过高且水平,以免造成吸液针损伤。 六、定期把洗液及废液管道拆卸下来进行冲洗,以保证管道的通畅、干净。https://www.360docs.net/doc/f39166561.html,/狼牌腹腔镜
自动洗板机使用说明书
用户安全提示 请您在仪器使用之前,仔细阅读本《使用说明书》后再进行仪器的使用。 表示保护接地端子。 任何人不许拆卸、更换,否则有可能出现触电或火灾,不要进行用 户手册描述的维护操作以外的任何操作。 确认采用了指定电源,若采用非指定电源,可能会出现火灾或触电。 应该采用独立电源。如果和其他电器设备同用一个电源插座,在 插座处会格外热,容易引发火灾。 拔下插头时,不应拉电源线,应该用手指支撑着插头把它拔下来, 否则,可能会触电或短路引发火灾。 不要用湿手插拔电源,可能会触电。 不要损坏电线和连接电缆等,不要踩踏、扭曲、拉扯电线和电缆,如果电线和电缆折断会发生触电或引发火灾。 不要用已经损坏的电线和连接电缆等,可能会发生触电、或引发火灾。 不要用设计要求以外的其他电线和电缆,如果电容量小,会引发火灾。 有异常动作时,应立即停止操作。 当感觉到有烧焦味或异味等,异常错误时,立刻关掉电源,拔下电源线。 必须使用有良好接地的电源插座,否则当仪器出现漏电时,会引起触电。 使用和操作时应遵照“用户使用手册”的规定或指导。 不要用松脂油、笨等化学试剂清洁外部的污滓,因为它可能引起颜色和形状的变化,用软布或湿布擦洗,对于严重的污渍,用清洗剂或75%的酒精清洁。 如遇到螺钉或金属物掉进仪器内,以立即停止操做作,请有资质的维修人员将金属物取出后再开始操作,否则可能会引起仪器故障。 不要把试剂和水等放到仪器台面上,避免液体漏进仪器内部,对仪器造成损坏。
目录 一、概述 (1) 二、技术性能 (1) 2.1输入功率 (1) 2.2熔断器 (1) 2.3工作条件 (1) 2.5技术参数及功能 (1) 2.6工作原理图 (2) 2.7产品结构组成 (2) 2.8外形示意图 (3) 三、安装 (4) 3.1开箱 (4) 3.2电源及环境要求 (4) 3.3管路连接 (4) 3.4开机调验 (5) 四、键盘功能简介 (6) 五、仪器操作 (7) 5.1清洗板路 (7) 5.2冲洗管路 (14) 5.3压力调节 (15) 六、注意事项 (15) 七、日常维护与保养 (16) 7.1维护与保养 (16) 7.2清洁 (16) 7.3消毒 (16) 7.4更换熔断器 (16) 7.5周期性检查 (16) 八、故障排除 (17) 8.1开启电源,仪器无显示 (17) 8.2接通电源,仪器有显示,但仪器不自检,按键无反应 (17) 8.3洗板机工作时,清洗头短针无清洗液喷出,或出液量偏少 (17) 8.4洗板完毕后,酶标板孔内残液量偏多 (17) 8.5每次洗板时,清洗头短针注到酶标板微孔中的洗液量超标,洗液溢出 (17) 8.6洗板机工作时,清洗头短针不停的出液 (17) 8.7洗板机开机以后,仪器后部的排气嘴喷水或仪器底部漏水 (18) 8.8清洗头与酶标板的位置不对,清洗头、托盘运动不灵活 (18) 8.9仪器开机后,清洗头或托架运动不止 (18) 九、维修服务 (19) 十、附件 (19)
上海仰邦传媒软件使用说明
LedShowGG 2011使用说明书 版本:2011-03-01 1 系统简述 (2) 1.1功能说明 (2) 1.2系统结构 (2) 1.3软件组成 (2) 2 系统安装和卸载 (3) 2.1 IIS的安装和卸载 (3) 2.2服务器的安装和卸载 (7) 2.3数据表的安装和卸载 (9) 2.4客户端安装和卸载 (10) 2.5发送端安装和卸载 (12) 3 系统配置 (13) 3.1编辑端配置 (13) 3.2服务端配置 (13) 4 使用说明 (14) 4.1客户端使用说明 (14) 4.1.1权限分配 (15) 4.1.2屏幕管理 (18) 4.1.3终端权限设置 (20) 4.1.4节目权限设置 (21) 4.1.5单节目编辑 (23) 4.1.6多节目编辑 (26) 4.1.7节目审核 (29) 4.1.8节目发送 (30) 4.1.9命令发送 (30) 4.1.10日志管理 (31) 4.1.11系统管理 (32) 4.2发送端使用说明 (33) 5 注意事项 (36) 5.1 客户编辑 (36) 5.2 数据发送 (36) 6 客户服务 (37)
1 系统简述 1.1功能说明 LedShowGG 2011信息发布系统是专业的基于局域网或者互联网的LED显示屏幕编播控制系统,它独有分布式区域管理技术真正实现了统一系统中不同终端区分受众的传播模式。通过该系统,用户可以轻松地构建一个集中化、专业化、智能化、分众化,安全化的LED信息发布网路。 本系统提供功能强大的信息编辑、加密、传输、发布和管理等操作。几乎支持目前所有的主流媒体文件格式,它可以让企业,广告商,运营商或者连锁式机构基于网络构建一个可以发布图片、字幕、动画,时钟等多种媒体信息的多媒体信息发布平台,为用户提供高质量高效率的LED显示屏幕控制服务。 1.2系统结构 工作流程:建立中心服务器,其他的客户编辑通过网络进行数据管理并将数据提交到中心服务器,中心服务器进行数据转换,发送到显示终端上面。(适合使用于内网或者公网) 1.3软件组成 由客户端,服务器端,发送端4个部分组成,其中服务器端包含数据库和IIS。主要执行程序为Client.exe/Send-net.exe/ Send-gprs.exe /SqlTools.exe。
电罗经安修斯STD-22技术资料
安修斯电罗经STD22及标准配备分罗经技术资料 1、(1)Standard 22 Compact Gyro Compass STD22电罗经1SET 1)Performance性能标准 Type型号:STD-22,产地:ANSCHUETZ德国 Power supply电源:DC24V Automatic Speed Error Correction 自动速度误差校正 Automatic Dynamical Error Correction 自动动态误差校正 Type Approval (IMO) Including High Speed (70 knots) IMO认可,包括适用达70节高速船认 可 信号输出: 2 x NMEA or Course Bus NMEA或安修司Course总线 1 x Course Bus 安修司Course总线 4 x Status (Potential Free Contact) 状态输出(无源触点信号) Signal Input From: 信号输入: 1 x NMEA 0183 From GPS (GLL/GGA) NMEA 0183从GPS 1 x log: 200 or 400 p/NM or NMEA 0183 and Direction 200或400脉冲/海里或NMEA 0183 148-450 2)Comprising设备配置 1 Master Compasses Standard 2 2 主罗经 1 Gyrosphere 罗经球 1 Supporting Liquid and Distilled Water 支撑液和蒸馏水 1 on Board Spare Parts 船用备件 1 NMEA/Course Bus Booster 1 input/8 outputs Serial booster NMEA/course bus 数字信号分配器,1进8出 1 AC-DC Converter (115/230 V AC, 24 V DC, 240 W)电源单元 (2)ANSCHUETZ Repeater Compass 安修司航向分罗经 133-560 1SET for flush mounting* - IP 23 嵌入安装–IP23 . self synchronizing 自同步 . large compass card (150 mm) 150mm的罗经指示盘 . analogue and digital display 模拟及数字显示 . heading source indication 航向信号指示 . ANSCHüTZ course-bus system or NMEA 0183 安修司Course-bus信号或NMEA1083信号. dimmer button and anti-glare screen 调光按钮及防晕罩 (3)Bearing Repeater Compass 方位分罗经 133-407 2SETS Standard Type - IP 56 标准形式IP-56 Self Synchronizing 自同步 ? ANSCHUETZ Course Bus-System or NMEA 0183 Input 接入安修司Course总线系统或NMEA 0183 ? Large 360 Degree Compass Card 190 mm 直径为190毫米的360度读数盘 ? Incl. Dimmer 包括调光 (4)Pelorus Stand方位分罗经立式支架 2SETS For bearing repeater 133-407 incl. junction box方位分罗经立式支架,带防水接线盒
英国翠欧控制器
产品型号:P170 产品名称:MC224运动控制器 产品特点:运动控制器MC224是Trio公司目前功能最强大的组合式的运动伺服控制器。通过插入合适的“轴板"(具有轴控制功能的子板),实现对伺服或步进轴的控制,根据应用的需要,这些子板可以是伺服与步进方式的任意组合。 P170MC224运动 控制器的详细资 料: 运动控制器MC224是Trio公司目前功能最强大的组合式的运动伺服控制器。通过插入合适的“轴板"(具有轴控制功能的子板),实现对伺服或步进轴的控制,根据应用的需要,这些子板可以是伺服与步进方式的任意组合。如果利用数字总线连接的方式(SERCOS总线),可以最多达对24个轴的控制;如果是通过传统的模拟量指令输出+编码器反馈的方式,可以实现最多对16个轴的控制。该控制器外部机盒的金属部分与电路板之间采取了必要的隔离措施,使其适合于在工业环境中安装在各种设备上应用。控制器内部包含有电源滤波功能,采用直流24V电源供电,适合绝大多数工业控制柜内的安装。 通过PC机上的MotionPerfect软件,可以对MC224进行应用程序的编程和配置。如果最终的系统内并不需要PC机的情况下,MC224可以独立运行。 MC224支持多任务程序执行。在控制器中可以同时执行多达14个的Trio BASIC应用程序 MC224有16个光电隔离数字式I/O(8个输入,8个双向功能的输入/输出)。这些开关量可以作为系统内部的逻辑交换变量,或者可以根据实际需要用于连接控制器的限位信号、原点信号及一些反馈信号。每个输入/输出通道都有一个LED指示灯与之相对应,方便用户观察它们的当前状态。此外,MC224还具有512个开关量输入/输出点的扩展能力,通过MC224的CAN总线可以将这些支持CAN总线的16点I/O扩展模块连接起来,这些扩展模块具有DIN导轨安装的功能。 MC224本体模块上有两个RS232的通讯接口,一个全双工的RS485接口(RS422接口),以及一个USB接口。Trio的光纤网络系统作为选项也是可以采用的。 其中的一个RS232接口或RS485接口,可以配置为MODBUS协议,以便于PLC或HMI相连接。 如果没有连接Trio的CAN总线扩展模块,那么控制器的CAN总线接口可以被编程,用来连接其它的CAN总线设备;也可以通过设置,使其支持DEVICE-NET协议,作为从站加入到DEVICE-NET 的网络中去;或者通过编程使其支持CanOpen协议。 此外通过添加相应的通讯子板,实现Ethernet及Profibus网络的连接,或者扩展一路CAN总线接口。
DNX-9620A型洗板机操作规程
DNX-9620A型洗板机操作规程 1. 目的 规范DNX-9620A型洗板机操作程序,正确使用、维护、保养洗板机,保证检验结果准确可靠,同时避免事故的发生,确保使用者的安全。 2. 适用范围 本操作规程适用于本公司DNX-9620型洗板机的操作使用。 3. 职责 3.1使用人员:应按使用说明书或操作规程正确使用,并作好记录。 3.2 保管人员:进行日常管理与维护,监督仪器操作是否符合规程。 3.3 计量检定员:负责DNX-9620型洗板机的周期检定计划并实施。 3.4科室负责人:负责对仪器的综合管理。 4.仪器设备性能技术指标 4.1使用条件:环境温度5-40℃,相对湿度小于85%,电源 220V/50Hz/30VA。 4.2技术参数:可每排8或12孔的方式冲洗96孔酶标板,冲洗液注入量的均匀性小于±5%,冲洗液残留量小于5ul,冲洗循环次数1-9次,可存储16个用户程序。
5.安全操作注意事项及特别提示 5.1本仪器必须设专人管理,实行专管共用,使用人员必须经专门培训。 5.2仪器正常使用环境:室内清洁、干燥、无腐蚀性气体。 5.3使用前,先检查是否有短路、断路或漏电现象,电源是否符合要求,接地是否良好。 5.4不得频繁开关仪器,每次开机应保持一定时间间隔。 6. 操作规程 6.1设备运行步骤 6.1.1开机:插上电源线,打开仪器开关。 6.1.2换液:选择冲洗栏内的换液,(这时不要打开转换开关),把仪器内的蒸馏 水换成洗液,完毕后,返回主菜单。 6.1.3复位:把待洗的酶标板轻轻地方入托盘内,放平、放稳、放好,然后按暂停键加左移键,使仪器自动返回初始状态,(此时不要再动托盘)。 6.1.4洗板:根据自己的实际需要选择所需要的洗板程序,或自行更改洗板次数、排数、秒数,选择完毕后,光标返回洗板栏内,再按回车键进行洗板。
事故控制卡(ACT卡)
3.2 事故控制卡(ACT卡) 3.2.1 ACT卡简介 事故控制技术是壳牌公司一项先进的安全管理技术,即通过员工辨认和根除人的不安全行为与物的不安全状态,达到确保安全与避免事故的目的。主要做法是每位员工都可结合自己的作业内容填写事故控制(ACT)卡,都有权对HSE工作提出建议。 通过对大量不安全行为的记录,HSE管理部门可以分析管理漏洞并及时纠正。ACT卡的程序是:观察、接近、讨论、赞同、记录和现状等五个部分。即:当记录人发现员工有不安全行为时,要主动接近该员工,与他一起友好地讨论不安全行为可能带来的后果,得到他的认同,这时再记录员工的不安全行为,并提交HSE专业部门进行分析。每一张卡片往往就是一起违章事件,就是一个HSE隐患。通过这张卡片,不仅有利于HSE管理人员及时发现和控制现实中存在的隐患,防微杜渐,而且有利于形成人人关心安全、人人心中有HSE的氛围。这种文化的精髓就在于“共同参与,持续改进”,主张人人都是HSE的管理者和监督者,大家都有权对HSE工作提出建议,并且这些建议会得到回复。这样,HSE文化就会渗透到项目中的每一个部门和工作中的每一个环节,形成一种真正意义上的从上到下落实了的健康、安全与环境管理体系。 3.2.2 ACT卡填写内容 (1)事故控制(ACT)卡正面为HSE改进建议填写页,填写内容包括: 所观察的不安全行为及有污染隐患的行为;
对不安全行为及隐患即刻的纠正行为和措施; 所观察到需要鼓励的安全、环保行为; 持续改进HSE工作的其他建议; 观察者姓名、填写日期; (2)事故控制(ACT)卡背面为可能导致人员伤害或发生事故的七项不安全行为或不安全状态。分为: 个人安全防护装备 人员的位置 工具与设备 避险路线 作业程序与秩序 环保及其他。 3.3.3 应用案例 ACT卡目前在长庆油田公司和新疆油田公司都得到了应用。比如在新疆油田公司采气一厂就合理有效使用事故控制卡(ACT卡)提出要求:一、加大宣传力度,让每一位员工都清楚事故控制(ACT)卡的使用方式;二、通过共同参与、持续改进,不断提升安全管理水平; 三、对提出建议的员工采用多种形式的表扬和奖励;四、多方收集员工对于事故控制卡(ACT卡)制作和条款方面的建议,以便改进。长庆油田公司也重奖事故控制卡(ACT卡)推广应用优秀集体和ACT卡使用先进个人。
陀螺罗经
陀螺罗经 B1、安许茨4型罗经,在纬度20°处起动时达稳定指北需3h,若起动状态一样,则在纬度60°处达稳定指北的时间。 A.仍为3h B.大于3h C.小于3h D.A、B、C皆可能 A2、在北纬静止基座上,下重式罗经主轴指北端的稳定位置是。 A.子午面内水平面之上 B.子午面内水平面之下 C.子午面之东水平面之上 D.子午面之西水平面之下 B3、把自由陀螺仪改造为陀螺罗经,关键是要。 A.克服地球自转B.克服地球自转角速度垂直分量所引起的主轴视运动 C.克服地球自转角速度水平分量所引起的主轴视运动 D.克服陀螺仪的定轴性 D4、一个自由陀螺仪要成为实用的陀螺罗经,必须对其施加。 A.进动力矩和稳定力矩 B.控制力矩和稳定力矩 C.进动力矩和阻尼力矩 D.控制力矩和阻尼力矩 A5、液体连通器式陀螺罗经在起动过程中,当主轴指北端向水平面靠拢时,阻尼力矩起到的作用。 A.增进其靠拢 B.阻止其靠拢 C.不起作用 D.以上都不对 B6、下列何种陀螺罗经采用西边加重物的垂直轴阻尼法。 A.安许茨4型罗经 B.斯伯利37型罗经 C.航海1型罗经 D.阿玛一勃朗10型罗经 A7、在北纬,船用陀螺罗经在稳定位置时,为什么其主轴要在水平面之上有一高度角,主要用于产生。 A.控制力矩 B.阻尼力矩 C.动量矩 D.以上均错 B8、当陀螺罗经结构参数一定时,罗经等幅摆动的周期为84.4min所对应的纬度被称为。 A.标准纬度 B.设计纬度 C.20° D.固定纬度C9、高速旋转的三自由度陀螺仪其进动性可描述为。 A.在外力的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力方向 B.在外力矩的作用下,陀螺仪主轴的动量矩矢端力图保持其初始方位不变C.在外力矩的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力矩 D.在外力矩的作用下,陀螺仪主轴即能自动找北指北 C10、舒拉条件是指当陀螺罗经的等幅摆动周期为,陀螺罗经不存在第一类冲击误差。 A.6h B.90min C.84.4min D.60min B11、陀螺罗经的阻尼因数表示主轴减幅摆动过程快慢程度,其大小在范围。 A.1~2 B.2.5~4 C.5~10 D.以上均错 D12、根据“海船航行设备规范”的要求,一般要在开航前4~6h起动陀螺罗经,这是因为。 A.罗经约经3个周期的阻尼摆动才能达到其正常工作温度 B.罗经约经3个周期的阻尼摆动才能达到其正常工作电流 C.罗经约经3个周期的阻尼摆动才能达到稳定
运动控制卡简介
运动控制卡是一种基于PC机及工业PC机、用于各种运动控制场合(包括位移、速度、加速度等)的上位控制单元。 运动控制卡是基于PC总线,利用高性能微处理器(如DSP)及大规模可编程器件实现多个伺服电机的多轴协调控制的一种高性能的步进/伺服电机运动控制卡,包括脉冲输出、脉冲计数、数字输入、数字输出、D/A输出等功能,它可以发出连续的、高频率的脉冲串,通过改变发出脉冲的频率来控制电机的速度,改变发出脉冲的数量来控制电机的位置,它的脉冲输出模式包括脉冲/方向、脉冲/脉冲方式。脉冲计数可用于编码器的位置反馈,提供机器准确的位置,纠正传动过程中产生的误差。数字输入/输出点可用于限位、原点开关等。库函数包括S型、T型加速,直线插补和圆弧插补,多轴联动函数等。产品广泛应用于工业自动化控制领域中需要精确定位、定长的位置控制系统和基于PC的NC控制系统。具体就是将实现运动控制的底层软件和硬件集成在一起,使其具有伺服电机控制所需的各种速度、位置控制功能,这些功能能通过计算机方便地调用。现国内外运动控制卡公司有美国的GALIL、PAMAC,英国的翠欧,台湾的台达、凌华、研华,国内的雷赛、固高、乐创、众为兴等。 运动控制卡的出现主要是因为: (1)为了满足新型数控系统的标准化、柔性、开放性等要求; (2)在各种工业设备(如包装机械、印刷机械等)、国防装备(如跟踪定位系统等)、智能医疗装置等设备的自动化控制系统研制和改造中,急需一个运动控制模块的硬件平台; (3)PC机在各种工业现场的广泛应用,也促使配备相应的控制卡以充分发挥PC机的强大功能。 运动控制卡通常采用专业运动控制芯片或高速DSP作为运动控制核心,大多用于控制步进电机或伺服电机。一般地,运动控制卡与PC机构成主从式控制结
洗板机的标准操作程序(SOP)
规范洗板机的操作程序,保证洗板机的正常状态。 【适用范围】 本实验室洗板机的操作。 【操作人员】 本实验室实验人员。 【操作步骤】 1.拔掉废液瓶口的塞子(接有与洗板机相连的废液管),倒掉废液瓶的废液,再把塞子安紧在废液瓶口上。注意不要让废液管拧劲,以保证废液管的通畅。 2.拧开洗液瓶的盖子(接有与洗板机相连的洗液管),倒掉前一天洗液瓶里剩余的洗液,倒进新配的洗液。拧紧盖子,注意不要让洗液管拧劲,以保证洗液管的通畅。 3.保证待洗反应板所有的孔处于同一水平位置,以免孔边缘过高碰到洗板机的吸液针。 4.插上电源,打开电源开关(按后面板POWER键),出现如下界面: 5.按“OUT”键,载板台弹出。将待洗反应板放在载板台上。 6.按“YES”键后再按↑或↓键以选择相应程序,然后按再“YES”键,此时屏幕显示“LAST STRIP 12”。 7.再按↑或↓键以选择待洗板条的数目。然后按“YES”键即可。 8.清洗完成后,重新出现4 架弹进。再按后面板POWER键关闭电源。 9.若中途退出,按“ESC”键。 【洗板机的维护保养】 1.平常不用时,拔掉电源插头。
2.每天洗板机工作结束时,要对内外其进行清洁,用湿抹布擦洗洗板机的外壁及载物台,以保证其洁净。用蒸馏水将所有的管道清洗一遍,防止洗液的结晶堵塞管道。 3.及时倒弃废液,以免废液瓶过满致使废液回流而造成洗板机的故障。 4.保证待洗的反应板的孔边缘不要过高且水平,以免造成吸液针损伤。 5.定期将洗液及废液管道拆卸下来进行冲洗,以保证管道的通畅。 【编制洗涤程序】 1. 插上电源,打开电源开关(按后面板POWER键),出现如下界面: 按“↑”“↓”键使RUN变成EDIT后按“YES”键进入如下界面: 每一洗涤循环包括吸液(根据自己的需要设定吸液的速度)、注水(根据自己的需要设定注水量)、再吸液(根据自己的需要设定吸液的速度)三步,设定5或6个循环即可。 编程完成后,按EXIT回到1的界面。 操作人员 部门主管质量负责人 姓名 ****** ****** ****** 日期 **年**月**日
仰邦说明书
杭州泰力电子科技工程有限公司 软 件 说 明 书 地址:杭州市石祥路1726号1号楼5楼技术电话:(0571)85353325 85902181
第一章概述 1.1 LedshowTW简介 LedshowTW软件专为LED图文控制器配套设计,自98年投放市场,历经几代产品的更新发展,功能日臻完善,操作简单,深受广大用户喜爱。 我公司最新推出的LedshowTW Super2.0版本是我们在多年从事LED异步控制器研发基础上提出的一套最完善的整体解决方案。该编辑软件,从功能和使用上都有了很大的改进。产品从2007年01月开发至今,得到了许多业内朋友的指导和帮助。在此深表谢意! 1.2 LedshowTW Super 2.0主要功能特点 ////需修改 1、支持显示屏参数软件的初始化设置、加载; 2、支持多区域画面编辑与显示; 3、支持中英文时钟编辑与显示; 4、支持游走字幕编辑与显示; 5、支持正负温度、湿度等传感器信息编辑与显示; 6、支持19种画面显示特效; 7、支持图片信息的编辑、浏览和播放; 8、强大的超文本编辑器(RTF格式); 9、显示信息的预览; 10、各页面显示方式、运行速度、停留时间均可软件调节。 11、显示信息的发送; 12、图片编辑(BMP格式); 13、区域内的各种修饰方式(空心、轮廓、阴影); 14、表格编辑(BLS格式); 15、多种通讯模式的选择包括支持网络传输接口; 16、多种调亮方式选择(包括手动、自动、分时调亮); 1.3 运行环境 ◆操作系统 基于WIN98/WIN2000/WINXP下的集成环境; ◆硬件配置 CPU:Pentium 300MHz以上 内存:64M以上 ◆相关软件 Microsoft Office2000:如需Word(*.doc)文件必须安装
1296-9410-02 Platewash_洗板机操作说明
1296-9410-02 2011 年8 月 1296-937-11 英文版译本 仪器手册 1296-026 DELFIA Platewash 微孔板洗板机 Wallac Oy,Mustionkatu 6,FI-20750,Turku, Finland. 电话358-2-2678111 传真358-2-2678357 网址:https://www.360docs.net/doc/f39166561.html,
制造商:Wallac Oy 地址:Mustionkatu 6 FI-20750, Turku, Finland 电话:00358-2-2678 111 传真:00358-2-2678 357 产品注册号:国食药监械(进)字2007第2401254号 产品标准号:YZB/ FIN 1173-2006 售后服务机构:珀金-埃尔默仪器(上海)有限公司 注册地址:上海市外高桥保税区希雅路 33 号 14 号楼 3 层 D 部位联系地址:上海市张江高科技园区李冰路 67 弄 4 号楼 201203 电话:021-3876 9510 传真:021-5079 1316 800免费服务热线:800 820 5046
警告 本设备的安装和使用必须依照制造商的建议进行。安装和维护必须由经过专门培训的、经 PerkinElmer 公司授权的技术人员操作。 违反上述规定将使设备保修失效并/或导致设备无法安全运行。
安全信息 警告:电击危险 本仪器必须与带有保护性地线的插座连接后才能进行操作。 必须能够随时拔出位于仪器后面板的主电源插头,以便于必要时将仪器断电。 虽然本仪器完全绝缘而且接地,所有用户仍必需认识到在电源附近使用液体的潜在危险性。如果液体溢出,应立即切断仪器电源并排干所有液体。应尽快清除溢出的液体。 如果液体渗入机箱,可能会对仪器造成严重损害。在具有资质的维修工程师对仪器进行彻底检查前,必须切断电源。 只有具有资质的维修工程师才能进行维修。 警告:液体溢出 某些操作模式下(如分液或系统清洗,特别是在自动控制下),微孔板的板孔可能会出现溢流。这将会导致液体的溢出和/或危险物质所引起的污染。应采取措施确保不发生溢出现象。 如果对环境有危害的液体溢出,必须切断仪器的电源,并将其移入通风橱或类似的地方,从而与工作环境隔离。与最近的维修中心联系,请求援助,同时告诉他们溢出物可能对健康造成的危害。 警告:错误操作 如果没有按照手册详述的内容操作该仪器,可能会损害仪器自身具有的防护功能。 不要在打开机壳后使用该仪器,仪器内部可能带有致命的高电压。 不要在未连接保护性地线时使用该仪器。 注意事项 不要将手指,铅笔或其它物体插入载板架的入口槽内。 当使用外部计算机控制洗板机时,应注意载板架意外移动以及洗板机泵所发出的噪音。 确保正确连接电源线。颜色代码如下: 欧洲:褐色—火线;蓝色—中性线;绿色/黄色—地线。 美国:黑色—火线;白色—中性线;绿色—地线。 在启动洗板机前,应确保所有连接紧密,且已取出所有填塞用材料(如泡沫塑料等)。 如果对该仪器的安全性还有任何怀疑,请与最近的、经认可的维修中心联系。 安全标识 在洗板机上可以找到下列警告与信息标识。只有具有资质且了解安全步骤的专业人员才能维修本仪器。请在使用仪器前仔细阅读本手册。 开关注意—请参照配套文件 生物危害