第5章 多自由度系统振动的运动微分方程
多自由度系统振动分析典型教案
第2章多自由度系统的振动 基本要点: ①建立系统微分方程的几种方法; ②固有频率、固有振型的概念以及固有振型关于质量和刚度矩阵的加权正交性; ③多自由度系统运动的解耦—模态坐标变换及运用模态叠加法求解振动系统的响应。 引言 多自由度振动系统的几个工程实例;多自由度系统振动分析的特点;多自由度系统振动分析与单自由度系统的区别与联系。 §2.1多自由度系统的振动方程 ●方程的一般形式:质量矩阵、阻尼矩阵、刚度矩阵和激振力 §2.2建立系统微分方程的方法 ●影响系数:刚度影响系数、柔度影响系数 ●刚度矩阵法、柔度矩阵法及这两种方法的特点;Lagrange方程法 §2.3无阻尼系统的自由振动 ●二自由度系统的固有振动:固有频率、固有振型。 ●二自由度系统的自由振动 ●二自由度系统的运动耦合与解耦 弹性耦合,惯性耦合; 振动系统的耦合取决于坐标系的选择; ●多自由度系统的固有振动 固有振动的形式及条件:特征值、特征向量、模态质量、模态刚度; 固有振型的性质:关于质量矩阵和刚度矩阵的加权正交性; 刚体模态; ●运动的解耦:模态坐标变换(主坐标变换)。 ●多自由度系统的自由振动 §2.4无阻尼系统的受迫振动 ●频域分析:动刚度矩阵和频响函数矩阵,频响函数矩阵的振型展开式,系统反 共振问题。 ●时域分析:单位脉冲响应矩阵,任意激励下的响应,模态截断问题,模态加速 度法。 §2.5比例阻尼系统的振动 ●多自由度系统的阻尼:Rayleigh比例阻尼。 ●自由振动 ●受迫振动:频响函数矩阵,单位脉冲响应矩阵,任意激励下的响应。 §2.6一般粘性阻尼系统的振动
●自由振动:物理空间描述,状态空间描述。 ●受迫振动:脉冲响应矩阵,频响函数矩阵,任意激励下的响应。 思考题: ①刚度矩阵和柔度矩阵在什么条件下是互逆的两个矩阵?从物理上和数学两方面加以解 释? ②为什么说模态质量、模态刚度的数值大小没有直接意义? ③证明固有振型关于质量矩阵和刚度矩阵的加权正交性,并讨论其物理意义。 ④在实际的多自由度系统振动分析中,为什么要进行模态截断? 参考书目 1.胡海岩,机械振动与冲击,航空工业出版社,2002 2.故海岩,机械振动基础,北京航空航天大学出版社,2005 3.季文美,机械振动,科学出版社,1985。(图书馆索引号:TH113.1/1010) 4.郑兆昌主编, 机械振动上册,机械工业出版社,1980。(图书馆索引号: TH113.1/1003-A) 5.Singiresu S R, Mechanical vibrations,Longman Prentice Hall, 2004(图书馆索引 号:TH113.1/WR32)
第三章 多自由度系统振动6.19
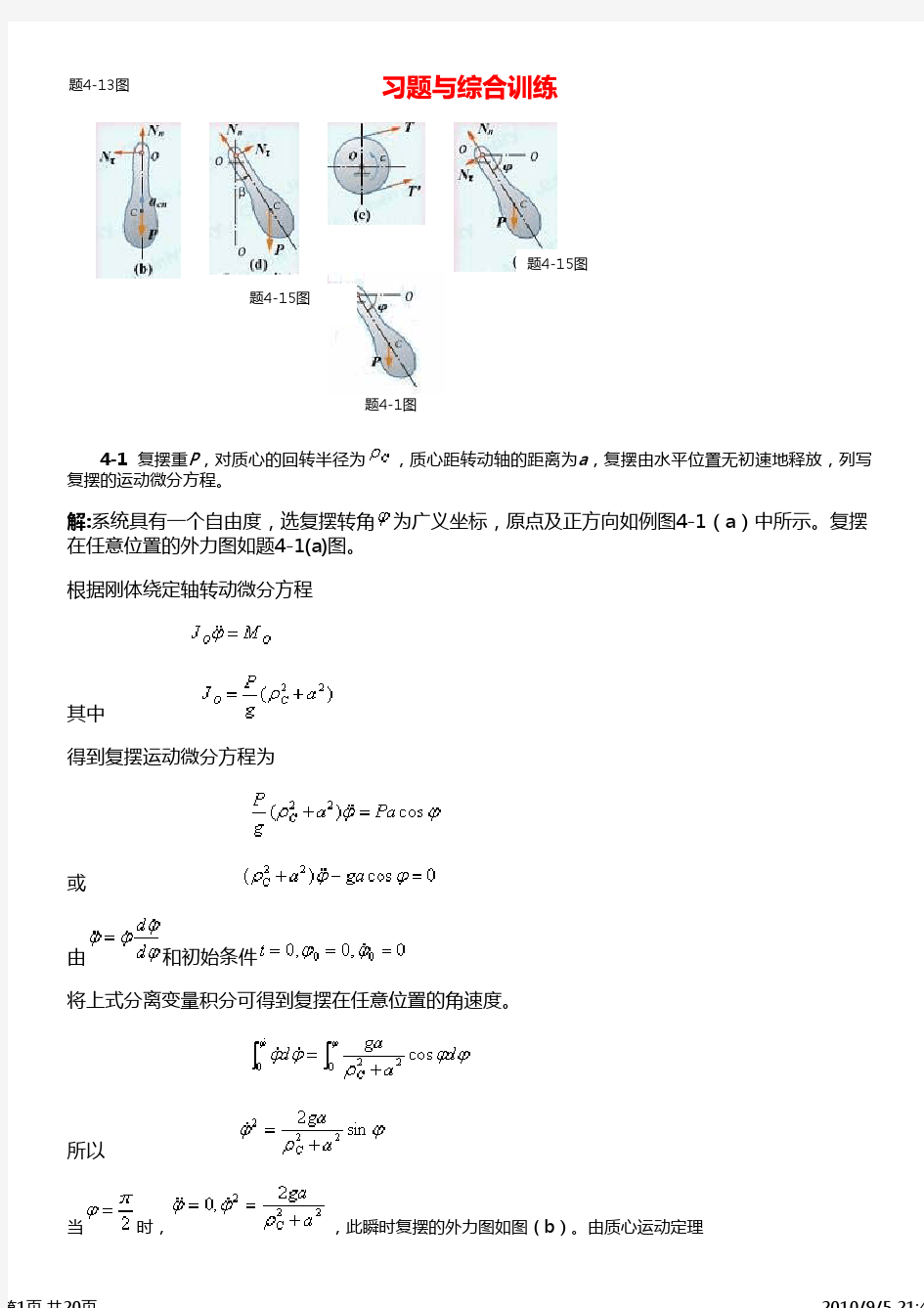
第三章 多自由度系统振动 多自由度系统和单自由度系统的振动特性是有区别的。单自由度系统受初始扰动后,按系统的固有频率作简谐振动。多自由度系统有多个固有频率,当系统按某一个固有频率作自由振动时,各独立坐标在振动过程中相互关系是固定的,这个关系叫振幅比,也叫作主振型或模态。主振型是多自由度系统以及弹性体振动的重要特征。 多自由度系统的振动方程是多个二阶微分方程组,这些方程一般是耦合的。多自由度振动的求解有两种方法:直接积分法和振型叠加法。直接积分法可直接根据微分方程求出响应,涉及的概念不多且有应用软件,本章不做介绍。振形叠加法要先求出系统的固有频率和振型,在此基础用叠加法求响应,物理概念清楚、并且是模态分析与参数识别的理论基础。因此本章将先用较多的篇幅介绍多自由度系统的固有振动特性、振型叠加法和传递函数。 3.1 振动微分方程 虽然一些多自由度系统数目较多,有些相当复杂,但建立多自由度系统振动微分方程并没有新理论和方法,都是动力学基本理论和方法,本节只通过例题介绍多自由度系统振动微分方程基本形式。 [例一] 试建立图3-1所示3自由度系统的运动微分方程。三个质量只作水平方 向的运动,并分别受到激振力()t P 1,()t P 2和()t P 3的作用,质量块的质量分别为1m ,2m 和3m ,弹簧刚度分别为1k ,2k 3k 和4k ,阻尼分别为1c ,2c 3c 和4c 。 图3-1 3自由度系统 ) (1t P 3 m ) (2t P 1 m 2 m ) (3t P 1 k 1 c 2 c 3 c 2k 3 k 4 k 4 c
解:分别用三个独立坐标1x ,2x 和3x 描述三个质量块的运动,坐标原点分别取 在1m ,2m 和3m 的静平衡位置。质量块的速度分别为1x ,2x 和3x ,加速度分别为1x ,2x 和3x 。每个质量块的受力图如3-2(a 、b 、c )所示,则由受力图根据牛顿第二定律,得系统的运动方程为: 图3-2 (a) 图3-2(b) 图3-2(c) )()()(1212112121111t P x x c x c x x k x k x m +------= )()()()()(232321232321222t P x x c x x c x x k x x k x m +---+---= )()()(3343233432333t P x c x x c x k x x k x m +--+--= 或 )()()(1221212212111t P x k x k k x c x c c x m =-++-++ )()()(23323212332321222t P x k x k k x k x c x c c x c x m =-++--++- )()()(3343233432333t P x k k x k x c c x c x m =++-++- 上述方程组可以用矩阵表示为: ?? ????????=????????????????????+--+--++????????????????????+--+--++????????????????????)()()(000032132143333222213214333322221321321t P t P t P x x x k k k k k k k k k k x x x c c c c c c c c c c x x x m m m 三个二阶微分方程是耦合的,这是因为矩阵中有非零的非对角元素。若质量、 刚度和阻尼矩阵都是对角矩阵,则三个微分方程是独立的,相当于三个独立的 )(1t P 1 x 11x c 1 1x k )(212x x c -)(212x x k -x m 1) (2t P 2x )(323x x c -) (323x x k -x m 2) (212x x k -) (3t P 34x c 3 4x k x m 33x )(323x x c -) (323x x k -1 m 3 m 2 m )(212x x c -
第4章 多自由度系统的振动题解
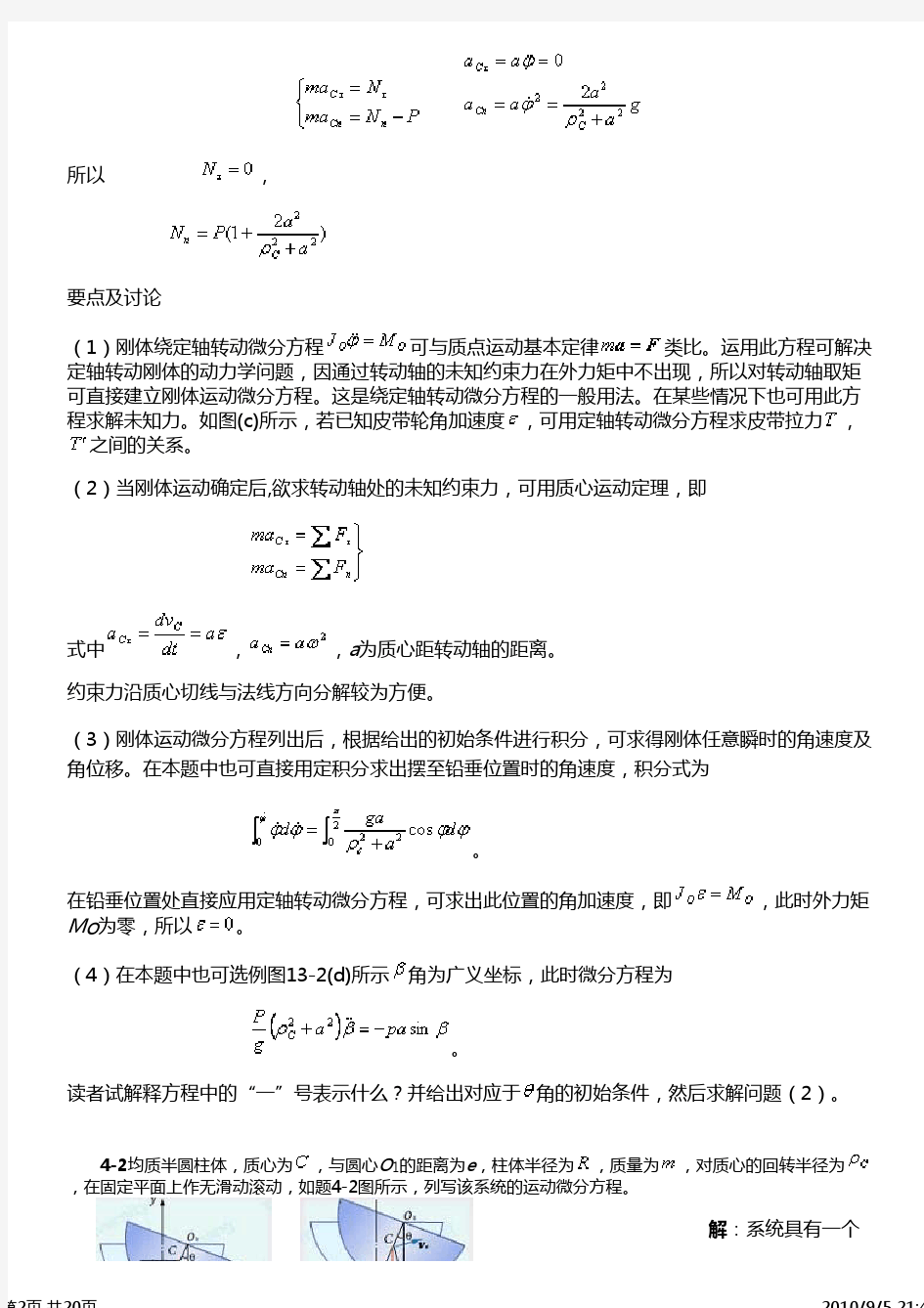
62 习 题 4-1 在题3-10中,设m 1=m 2=m ,l 1=l 2=l ,k 1=k 2=0,求系统的固有频率和主振型。 解:由题3-10的结果 2 2121111)(l g m l g m m k k + ++ =,2 221l g m k - =, 2 212l g m k - =,2 2222l g m k k + = 代入m m m ==21,021==k k ,l l l ==21 可求出刚度矩阵K 和质量矩阵M ?? ? ? ??=m m M 0 0;?? ?? ? ???? ?- - =l mg l mg l mg l mg K 3 由频 02 =-M p K ,得 032 2 =????? ?? ?? ?-- --=mp l mg l mg l mg mp l mg B 0242 2 22 2 4 2=+ - ∴l g m p l g m p m l g p ) 22(1-= ∴ ,l g p ) 22(2+= 为求系统主振型,先求出adjB 的第一列 ???? ? ? ? ?? ?-=l mg mp l mg adjB 2 分别将频率值21p p 和代入,得系统的主振型矩阵为 ? ? ????-=112) 1(A ??????+=112) 2(A 题4-1图
63 4-2 题4-2图所示的均匀刚性杆质量为m 1,求系统的频率方程。 解:设杆的转角θ和物块位移x 为广义坐标。利用刚度影响系数法求刚度矩阵k 。 设0,1==x θ,画出受力图,并施加物体力偶与力 2111,k k ,由平衡条件得到, 2 22 111a k b k k +=, a k k 221-= 设1,0==x θ,画出受力图,并施加物体力偶与力2212,k k ,由平衡条件得到, 12k a k 2-=, a k k 222= 得作用力方程为 ?? ? ???=???????????? --++????????????? ?000031222222122 1x a k a k a k a k b k x m a m θθ 由频率方程02=-M K p ,得 031 2 22222 212 22 1=---- +p m a k a k a k p a m a k b k 4-3 题4-3图所示的系统中,两根长度为l 的均匀刚性杆的质量为m 1及m 2,求系统的刚度矩阵和柔度矩阵,并求出当m 1=m 2=m 和k 1=k 2=k 时系统的固有频率。 解:如图取21,θθ为广义坐标,分别画受力图。由动量矩定理得到, l l k l l k I 434343432 1 1 1 11θθθ+-= 2 2434343432 2 2 1 1 1 22l l k l l k l l k I θθθθ--= 整理得到, 016 916 922 1 12 1 11=-+θθθl k l k I 题4-3图 题4-2图
第4章多自由度系统的振动题解
习 题 4-1 在题3-10中,设m 1=m 2=m ,l 1=l 2=l ,k 1=k 2=0,求系统的固有频率和主振型。 解:由题3-10的结果 22121111)(l g m l g m m k k +++ =,2 221l g m k -=,2212l g m k - =,2 2222l g m k k += 代入m m m ==21,021==k k ,l l l ==21 可求出刚度矩阵K 和质量矩阵M ??? ???=m m M 00;?? ?? ??????- - =l mg l mg l mg l mg K 3 由频率方程02=-M p K ,得 0322 =????? ??? ? ?-- - -=mp l mg l mg l mg mp l mg B 0242 2 2224 2 =+-∴l g m p l g m p m l g p ) 22(1-=∴ ,l g p )22(2+= 为求系统主振型,先求出adjB 的第一列 ???? ? ? ?? ??-=l mg mp l mg adjB 2 分别将频率值21p p 和代入,得系统的主振型矩阵为 ??????-=112) 1(A ?? ????+=112)2(A 题4-1图
4-2 题4-2图所示的均匀刚性杆质量为m 1,求系统的频率方程。 解:设杆的转角θ和物块位移x 为广义坐标。利用刚度影响系数法求刚度矩阵k 。 设0,1==x θ,画出受力图,并施加物体力偶与力 2111,k k ,由平衡条件得到, 222111a k b k k +=, a k k 221-= 设1,0==x θ,画出受力图,并施加物体力偶与力2212,k k ,由平衡条件得到, 12k a k 2-=, a k k 222= 得作用力方程为 ?? ? ???=??????????? ?--++????????????? ?00003122222 2122 1x a k a k a k a k b k x m a m θθ 由频率方程02=-M K p ,得 031 2 22222 212221=----+p m a k a k a k p a m a k b k 4-3 题4-3图所示的系统中,两根长度为l 的均匀刚性杆的质量为m 1及m 2,求系统的刚度矩阵和柔度矩阵,并求出当m 1=m 2=m 和 k 1=k 2=k 时系统的固有频率。 解:如图取21,θθ为广义坐标,分别画受力图。由动量矩定理得到, l l k l l k I 4 34343432 11111θθθ+-= 2 2434343432 2211122l l k l l k l l k I θθθθ--= 题4-3图 题4-2图
07210第四章--多自由度系统振动(讲1)
第3次作业题: 1、如图所示起重机小车,其质量为m 1=2220kg,在质心A 处用绳悬挂一重物B ,其质量为m 2=2040kg 。绳长l=14m,左侧弹簧是缓冲器,刚度系数k=852.6kN/m 。设绳和弹簧质量均忽略不计,当车连同重物B 以匀速v 0=1m/s 碰上缓冲器后,求小车和重物的运动。 2、两个质量块m 1和m 2用一弹簧k 相连,m 1的上端用绳子拴住,放在一个与水平面成а角的光滑斜面上,如习题下图所示。若t=0时突然割断绳子,两质量块将沿斜面下滑。试求瞬时t 两质量块的位置。 答案: α ωsin ]) (cos 2)([21222 221221g m m k t m t m m k m x +-++= αωsin ]) (cos 2)([21222 221222g m m k t m t m m k m x ++++= 3.如图,已知m 2=2×m 1=m ,k 3=2k 1=2k 2=2k ,x 10=1.2,x 20=10x =20x =0,试求系统的固有频率,主振型以及相应。 答案:利用程序,易得 固有频率: ωn 1=3.162277rad/s ,ωn 2=5 rad/s 主振型: m 1 m 2 k 3 k 2 k 1
系统相应: t x 5cos 8.03.1622777t cos 4.01+= t x 5cos 4.03.1622777t cos 4.02-= 4.已知:?? ? ???=11009][m ,[c ]= ??????--11.01.01,][k =??????--905050110,)}({t f =? ?? ???21,激振力频率 ω=3rad/s,试求系统的稳态响应。 答案:利用给定程序,输入给定数据,即获得系统的稳态响应。 第四章 多自由度系统振动 §4-1 多自由度系统运动方程的建立 (引言:问题的提出。)工程中的机械振动问题,有一些可以简化成一个或两个自由度系统的振动问题,因此可以用前面几章中介绍的方法进行分析计算。但是也有很多问题不能采用这种过于简化的力学模型来进行分析。一般来说,各种机器及其零部件的质量和刚度都具有分布的性质,因此理论上都是无限多自由度系统,即为弹性体。但由于机器的结构比较复杂,若都按无限多自由度来处理,在数学上有很大的,甚至目前还无法解决的困难。因此,只好将系统的结构用一些离散的结构来理想化。这样就把弹性体变成数目有限个的离散单元组成的有限多自由度系统。 如前所述,振动系统有多少个自由度就有多少个固有频率和主振型,也就有多少阶主振动,因此弹性体就有无穷多阶主振动。但有意
第5章 两自由度系统的振动概要
第5章 两自由度系统的振动 应用单自由度系统的振动理论,可以解决机械振动中的一些问题。但是,工程中有很多实际问题必须简化成两个或两个以上自由度,即多自由度的系统,才能描述其机械振动的主要特征。多自由度系统的振动特性与单自由度系统的振动特性有较大的差别,例如,有多个固有频率、主振型、 主振动和多个共振频率等。本章主要介绍研究两自由度系统机械振动的基本方法。 如图5-1所示。平板代表车身,它的位置可以由质心C 偏离其平衡位置的铅直位移z 及平板的转角θ 来确定。这样,车辆在铅直面内的振动问题就被简化为一个两自由度的系统。 5.1 双质量弹簧系统的自由振动 5.1.1 运动微分方程 图5-2(a)表示两自由度的弹簧质量系统。略去摩擦力及其它阻尼,以它们各自的静平衡位置为坐标x 1、x 2的原点,物体离开其平衡位置的位移用x 1、x 2表示。两物体在水平方向的受力图如图5-2(b)所示,由牛顿第二定律得 ? ? ?=+-=-++00)(2212222212111x k x k x m x k x k k x m (5-1) 这就是两自由度系统的自由振动微分方程。习惯上写成下列形式 ???=+-=-+00212211dx cx x bx ax x (5-2) 显然此时 2 2 1 2 1 2 1,,m k d c m k b m k k a = == += 但对不同的系统, 式(5-2)中各系数的意义并不相同。 图5-2两自由度的弹簧质量系统
5.1.2 固有频率和主振型 根据微分方程的理论,设方程(5-2)的解,即两自由度无阻尼自由振动系统的解为 ?? ? ??+=+=)sin()sin(2211ααpt A x pt A x (5-3) 或写成以下的矩阵形式 )sin(2121α+??? ???????=??????????pt A A x x (5-4) 将式(5-4)代入式(5-2),可得代数齐次方程组 ? ?? ???=????????????----002122 A A p d c b p a (5-5) 保证式(5-5)具有非零解的充分必要条件是式(5-5)的系数行列式等于零,即 0)(2 22 =----= ?p d c b p a p 展开后为 0)(24=-++-bc ad p d a p (5-6) 式(5-6)唯一确定了频率p 满足的条件,通常称为频率分程或特征方程。它是2p 的二次代数方程,它的两个特征根为 )(222 2 2 ,1bc ad d a d a p --??? ??++= bc d a d a +?? ? ??-+=2 22 (5-7) 由于式(5-7)确定的2p 的两个正实根仅取决于系统本身的物理性质,与运动的初始条件无关,因此p 称为系统的固有频率。较小的一个称为第一阶固有频率,较大的一个称为第二阶固有频率。 5.2.2 主振型 将固有频率p 1和p 2分别代入式(5-5)的任一式,可得到对应于它们的振幅比