汽车振动大作业

汽车振动学(大作业)车辆悬架系统振动分析
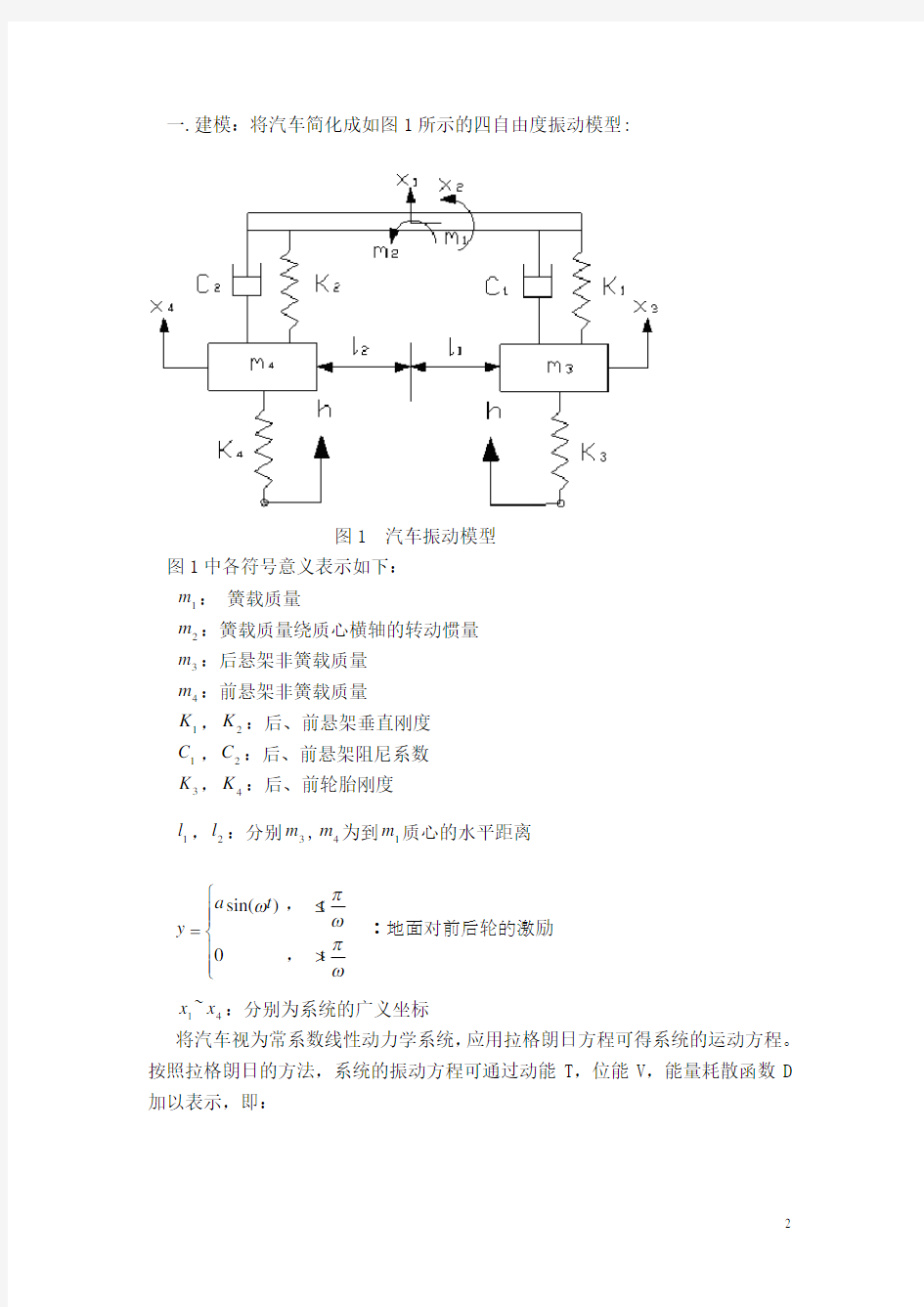
一.建模:将汽车简化成如图1所示的四自由度振动模型:
图1 汽车振动模型
图1中各符号意义表示如下:
1m : 簧载质量
2m :簧载质量绕质心横轴的转动惯量
3m :后悬架非簧载质量 4m :前悬架非簧载质量 1K ,2K :后、前悬架垂直刚度
1C ,2C :后、前悬架阻尼系数 3K ,4K :后、前轮胎刚度
1l ,2l :分别3m ,4m 为到1m 质心的水平距离
???????
>≤=
t 0 t )sin(ωπωπω,,t a y :地面对前后轮的激励
1x ~4x :分别为系统的广义坐标
将汽车视为常系数线性动力学系统,应用拉格朗日方程可得系统的运动方程。按照拉格朗日的方法,系统的振动方程可通过动能T ,位能V ,能量耗散函数D 加以表示,即:
)(t Q q D
q V q T q
T dt d j j j =??+??+??-?? -------1,2,3j =
式中j j q
q ,——广义坐标和广义速度; t ——时间;
V T ,——系统的动能和位能; D ——能量耗散函数;
)
(t j Q ——广义干扰力。 对于如图所示的系统,其动能可以表示为:
2442332222112
1
212121x m x m x m x m T +++= 而弹簧变形位能:
2
442332422122321112
121)(21)(21x K x K x x l x K x x l x K V ++--+-+=
能量耗散函数:
242212232111)(2
1
)l x (21x x l x C x x C D --+-+= 根据拉格朗日方程得:
??
????????
?=---+---=-+-+-+-=----++----++=--+-++--+-++y K x x l x C x K x x l x K x m y K x x l C x K x x l x K x m x x l x C l x x l x C l x x l x K l x x l x K l x m x x l x C x x l x C x x l x K x x K x 44221244422124433211133321113342
2122321111422122321111224221232111422123211111)()()x ()(0)()()()(0)()()()l x (m
将汽车视为常系数线性动力学系统,应用拉格朗日方程可得系统的矩阵方程:
F KX X C X
M =++ (1)
根据上式,得出系统的质量矩阵M ,刚度矩阵K 和阻尼矩阵C :
?????
????
?
?
?=43
2
1
m m m m M
?
?
???
??
??
???+-+---+----+=42222
3
11
122112
2
212
12
2112122112100l K K K l K K K lK K K l K l K l K l K l K l K K K l K K K K
?????
??
?????----+----+=22
22111122112
2
212
12
211212211210
0l C C l C C C l C C l C l C l C l C l C l C C C l C C C C ????
?
????
???=y K y K F 4300 二.自由振动分析:
可知自由振动方程为:
?????
??????
?43
2
1m m m m x
+
?????
??
?????----+----+22
221
1
1122112
2
212
122112122112
10
0l C C l C C C l C C l C l C l C l C l C l C C C l C C C x
+
?
?
?????
?????+-+---+----+422
22
3
11
122112
2
212
122112122112
10
0l K K K l K K K lK K K l K l K l K l K l K l K K K l K K K x =?????
?
??????0000 选取某国产汽车的参数如下:
1m =15950kg 2m =1143502m N ? 3m = 1000kg 4m =700kg 1
K =2500000
1
-?m N
2
K =400000
1
-?m N
3
K =2000000
1-?m N
4K =10000001-?m N 1C =140001-??m s N 2C =100001-??m s N 1l =2.5m 2l =3.1m
初始位移0u =0 m , 初始速度0v =1(m/s ) 求固有频率、固有振型矩阵:
代入数据并用MATLAB 计算可得固有频率为:1ω=6.4403
2ω=11.2158 3ω=44.9124
4ω=68.3204
固有振型矩阵:
?
?
???
?
?
??
???=Φ0.0000-0.0376
-0.0002-0.0035
0.03100.0000- 0.0061 0.00010.0004-0.0002-0.00200.0021-0.0011-0.00050.00560.0055
解耦MR= 1 -3.4434e-16 1.1275e-17 -1.9088e-16
-3.4520e-16 1.0000 0 3.9440e-16 1.0842e-17 0 1.0000 3.8163e-17 -1.9088e-16 3.7011e-16 3.8597e-17 0.9999 KR= 19.6813 -4.1841e-15 1.8027e-14 -2.1940e-13 3.0808e-15 41.6133 -1.4210e-14 3.5283e-13 8.8817e-16 0 2017.1184 5.4178e-14 -3.5813e-13 3.4072e-13 4.9737e-14 2973.6629 CR= 0.0075 0.02377 0.1105 -0.3233 0.0237 0.7287 3.3086 0.0399 0.1105 3.3086 15.0231 0.0555 -0.3233 0.0399 0.0555 15.6366
根据Runge-Kutta 法将方程(2)转化为方程(3)的形式
?
?
?===++00)0(,)0(0)()(u )(u u u u u t Ku t C t M
(2) []??
?==+-=-0
01)0(,)0()(u )()(u
u u
u u t C t Ku M t (3) 引入2N+1维状态向量:
????
??????=t t u t u t )()()(v 则式(3)可写成一阶微分方程组
)(0)(v 11
t v C M K M I t ??
?
???--=-- (4)
从而可用Runge-Kutta 法求解汽车车身的俯仰振动、垂直振动、前悬架垂直振动、后悬架
垂直振动,如图所示。
车身垂直方向振动曲线;
车身俯仰振动曲线
后悬架垂直振动曲线
前悬架垂直振动曲线
四.频率特性:
对受激励的车身运动微分方程两端进行Fourier 变换,得到基础激励下的系统的频响函数矩阵:
B C j M K H ?+-=-12)()(ωωω
其中, ?????
????
?
?
?=43
2
1m m m m M , ?????
??
?????----+----+=2222
111122112
2
212
12
211212211210
0l C C l C C C l C C l C l C l C l C l C l C C C l C C C C ,
?
?
?????
??
???+-+---+----+=422
22
3
11122112
2
212
12
211212211210
0l K K K l K K K lK K K l K l K l K l K l K l K K K l K K K K ,?????
???????=43
00000000000
K K B 用MA TLAB 做出各频响函数曲线如下:
图 H(1,1)的幅频响应曲线
图 H(1,1)的相频响应曲线
图H(2,1)的幅频响应曲线
图H(2,1)的相频响应曲线
四.强迫振动响应
假设系统的某一自由度受到一个简谐力,则系统的受迫振动可表示为:其中F(t)是频率为w的简谐力。
设前悬到频率为100hz,幅值为200N的简谐力。则系统的稳态响应如图:
车身垂直方向振动曲线;
车身俯仰振动曲线
前悬架垂直振动曲线
后悬架垂直振动曲线
由所得的结果可知系统在此激振力下的响应比较小,可知悬架的稳定性是比较好的。
三.瞬态响应分析:
系统受到半正弦波激励:t l
v
A t y π2sin
)(= ()2(0v l t ≤≤)
取车速为6=ν(m/s ) 波长m l 6.0= 波高A=0.15m
即 t t h ?=π20sin 15.0)( ( s t 05.00≤≤) 根据Runge-Kutta 法将方程(5)转化为方程(6)的形式
??
?===++0
0)0(,)0()()(u )(u u u
u u F t Ku t C t M
(5) []??
?==++-=--0
011)0(,)0()(u )()(u
u u u u F M t C t Ku M t (6) 引入2N+1维状态向量
????
?
?????=t t u t u t )()()(v 则式(6)可写成一阶微分方程组
??
?
???+??????--=---F M t v C M K M I t 111
0)(0)(v (7) 从而可用Runge-Kutta 法求解汽车车身的俯仰振动、垂直振动、前悬架垂直振动、后悬架垂
直振动,如图所示。
车身垂直方向振动曲线;
车身俯仰振动曲线
后悬架垂直振动曲线
前悬架垂直振动曲线
参考文献:
[1]胡海岩,孙久厚,陈怀海. 机械振动与冲击. 北京:航空工业出版社.
[2].吕彭民,和丽梅,尤晋闺.基于舒适性和轮胎动载的车辆悬架参数优化.中国公路学
报.2007.1
汽车理论作业五
2、 某轿车总质量为1900kg ,轴距为3.1m ,单个轮胎的侧偏刚度数值为 40000 N/rad 。已知该车稳态转向特性为过多转向,临界车速为180km/h 。 ( 1)计算该车的稳定性因数和静态储备系数; ( 2)计算该车的轴荷分配比例; ( 3)在质心位置、轴距和前、后轮胎的型号已定的情况下,试找出五种 改善其转向特性的方法。 答:1, 026.01041900/1.380000800008000080000../100.4) 6.3/180(11 42112122 2422-=???+?-=-+=-+=?-=-=-=--K m L K K K L a K K K m s m s U k Cr 2,2242122/100.4)40000 21.3)400002/((1.3/1900)(m s a a K b K a L m K -?-=?---?-=-= 解得:a=1.63m 后轴荷分布比:a/L=1.63/3.1=52.6% 前轴荷分布比:47.4% 3,前轮气压减小,后轮气压增大。 前轴加装横向稳定杆。 前悬架蚕蛹双横臂式等类型 悬架,后悬架采用单横臂式或非独立式。 采用前轮驱动。 合理利用变形转向,如后轮随动 合理利用侧倾转向 3、教材课后习题5.2。 答:轿车前悬架加装横向稳定杆后,前悬架侧倾角刚度1r K ?增大,整车侧倾角刚度增大,车厢侧倾角r φ减小;在分析侧倾时垂直载荷在左、右车轮上的重新分配时,可以得到: 当前悬架增加横向稳定杆后汽车前悬架的侧倾角刚度增大,后悬架侧倾角刚度不变, 前悬架作用于车厢的恢复力矩增加(总侧倾力矩不变),而后悬架作用于车厢的恢复力矩减 小,所以汽车前轴左、右车轮载荷变化量较后轴大。
汽车振动分析试题1
2008年振动力学期末考试试题 第一题(20分) 1、在图示振动系统中,已知:重物C 的质量m 1,匀质杆AB 的质量m 2,长为L ,匀质轮O 的质量m 3,弹簧的刚度系数k 。当AB 杆处于水平时为系统的静平衡位置。试采用能量法求系统微振时的固有频率。 解: 系统可以简化成单自由度振动系统,以重物C 的位移y 作为系统的广义坐标,在静平衡位置时 y =0,此时系统的势能为零。 AB 转角:L y /=? 系统动能: m 1动能:2 1121y m T = m 2动能:2222222 22 222)3 1(21))(31(21)31(2121y m L y L m L m J T ====? ω m 3动能:2322 323 33)2 1(21))(21(212 1y m R y R m J T === ω 系统势能: 2 21)21(21)21( y k y g m gy m V + +-= 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而有: E y k gy m gy m y m m m V T =+ +-++= +2 212 321) 2 1(2 12 1)2 13 1(2 1 上式求导,得系统的微分方程为: E y m m m k y '=+ + +) 2 131(4321 固有频率和周期为: ) 2 131(43210m m m k + + = ω 2、质量为m 1的匀质圆盘置于粗糙水平面上,轮缘上绕有不可伸长的细绳并通过定滑轮A 连在质量为m 2的物块B 上;轮心C 与刚度系数为k 的水平弹簧相连;不计滑轮A ,绳及弹簧的质量,系统自弹簧原长位置静止释放。试采用能量法求系统的固有频率。 解:系统可以简化成单自由度振动系统,以重物B 的位移x 作为系统的广义坐标,在静平衡位置时 x =0,此时系统的势能为零。 物体B 动能:2 212 1x m T = 轮子与地面接触点为速度瞬心,则轮心速度为x v c 2 1= ,角速度为x R 21=ω,转过的角度为x R 21= θ。轮子动能: )83(21)41)(21(21)4 1( 2 12 1212 122 21212 2 12x m x R R m x m J v m T c =+= + = ω 系统势能: x
汽车理论课后作业matlab编程详解(带注释)分析解析
1.3matlab程序: (1) %驱动力-行驶阻力平衡图 %货车相关参数。 m=3880; g=9.8; nmin=600; nmax=4000; G=m*g; ig=[5.56 2.769 1.644 1.00 0.793];y=0.85;r=0.367;f=0.013;CdA=2.77;i0=5.83; L=3.2;a=1.947;hg=0.9;If=0.218;Iw1=1.798;Iw2=3.598; n=600:10:4000; %发动机转数转换成汽车行驶速度。 ua1=0.377*r*n/ig(1)/i0; ua2=0.377*r*n/ig(2)/i0; ua3=0.377*r*n/ig(3)/i0; ua4=0.377*r*n/ig(4)/i0; ua5=0.377*r*n/ig(5)/i0; %计算各档位驱动力。 Tq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.84 45*(n/1000).^4; Ft1=Tq*ig(1)*i0*y/r; Ft2=Tq*ig(2)*i0*y/r; Ft3=Tq*ig(3)*i0*y/r; Ft4=Tq*ig(4)*i0*y/r; Ft5=Tq*ig(5)*i0*y/r; %计算行驶阻力。 Fz1=m*g*f+2.77*ua1.^2/21.15; Fz2=m*g*f+2.77*ua2.^2/21.15; Fz3=m*g*f+2.77*ua3.^2/21.15; Fz4=m*g*f+2.77*ua4.^2/21.15; Fz5=m*g*f+2.77*ua5.^2/21.15; %驱动力-行驶阻力平衡图。 plot(ua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua1,Fz1,'k',ua2,Fz2,'k', ua3,Fz3,'k',ua4,Fz4,'k',ua5,Fz5,'k'); title('驱动力-行驶阻力平衡图'); xlabel('ua(km/s)');
《汽车运用工程》期末备考资料
《汽车运用工程》复习提纲 汽车理论考试只探到考试题型:名词解释6个,共18分,填空题22分,论述题5道,共40分,计算题3道。。没有选择题。。就这些了,老师说题目比较多,所以好好复 习吧。 补充填空题: 1、汽车燃料经济性是在保证汽车动力性的基础上,以尽可能少的燃料消耗完成单位运输工作量的能力。 2、燃油经济性的计算方法:Qs=100gGt/VaY(p60) 3、汽车燃料经济性的评价指标:为了评价汽车的燃料经济性,通常用一定工况下汽车行驶百公里的燃料消耗量(L/100km)或单位运输工作量所消耗的燃料量(L/100t·km)作为评价指标。 4、汽车的制动性主要的评价指标有:制动效能、制动效能的恒定性、制动时汽车的方向稳定性。 5、汽车的稳态响应可分为:中性转向、不足转向、过度转向三类。 6、汽车的公害包括:汽车排气对大气的污染(排放公害);噪声对环境的危害(噪声公害);汽车电气设备对无线电通讯及电视广播等信号的电波干扰(电波公害);制动蹄片、离合器摩擦片、轮胎的磨损物和车轮扬起的粉尘对环境的危害(粉尘公害)等 7、汽车排气中的有害成分包括:CO、HC、NOx 、SO2、铅化合物、炭烟、油雾等。 8、间隙失效主要有:顶起失效、触头失效或拖尾失效。 9、汽车通过性的几何参数有:最小离地间隙、接近角、离去角、纵向通过角、最小转弯直径和转弯通道圆。 10、接近角y1和离去角y2是指自车身前、后车轮引切线时,切线与路面之间的夹角。 纵向通过角y3是指在汽车空载、静止时,在汽车侧视图上通过前、后车轮外缘做切线交于车体下部较低部位所形成的最小锐角。 11、汽车的走合期:新车或大修竣工的汽车在投入使用的初期称为汽车走合期,是汽车运行初期改善零件摩擦表面的几何形状和表面层物理机械性能的过程。 12、汽车在走合期的特点:①零件表面摩擦剧烈,磨损速度快。②润滑油变质快③行驶故障多。 13、汽车走合期采取的技术措施:减载、限速、正确驾驶、选择优质燃料和润滑油、加强维护。 14、发动机低温起动困难的原因有:曲轴旋转阻力矩大、燃料蒸发性差、蓄电池工作能力
汽车理论大作业
二自由度轿车模型的有关参数如下: 总质量 m =1818.2kg 绕z o 轴转动惯量 23885z I kg m =? 轴距 L=3.048m 质心至前轴距离 a=1.463m 质心至后轴距离 b=1.585m 前轮总侧偏刚度 rad N k /626181-= 后轮总侧偏刚度 2110185k =- /N rad 转向系总传动比 i=20 试求: 1)稳定性因数K 、特征车速ch u 。 2)稳态横摆角速度增益曲线r ωδ)s ----a u 车速u=22.35m/s 时的转向灵敏度r sw ωδ。 3)静态储备系数S.M.,侧向加速度为0.4g 时的前、后轮侧偏角绝对值之差12a a -与转弯半径的比值R/R 0(R 0=15m)。 4)车速u=30.56m/s,瞬态响应的横摆角速度波动的固有(圆)频率0ω、阻尼比ζ、反应时间τ与峰值反应时间ε。 提示: 1) 稳定性系数:??? ? ??-=122k b k a L m K =0.002422/m s 特征车速K u ch 1= =20.6s m /=74.18km/h 2) 转向灵敏度21Ku L u s r +=???δω=0.618 3) ()211αα-=L a K y ? 21αα-=0.0281rad δL R = 0 () 21ααδ--=L R ?0R R =1.16 4) 固有圆频率 m c '= 0ω=5.58rad/s.0f =0.8874Hz 阻尼比m h ' =02ωξ=0.5892 反应时间ω τΦ-== 0.1811s 峰值反应时间 ωξωωεΦ-=0 arctg =0.3899s
(完整版)长安大学汽车运用工程期末复习题及答案(学长呕心制作)
汽车运用工程复习题答案 这是老师给的三份复习题和答案,答案基本都是在百度文库里找的,大部分都找到原题了,有一部分找不到原题不过找到了问的差不多的题目,还有一部分没有找到,大家自己翻翻书吧。 --Vlanes 2013.6.22 汽车运用工程-汽车安全性 二.1为什么前轮较后轮先制动抱死不易产生剧烈侧滑?后轮较前轮先制动抱死易产生“甩尾”现象? 答:如果前轮在制动力作用下还在滚动,而后轮已经抱死。若在制动惯性力的基础上还存在一个侧向干扰力,那么合力将与车辆纵轴线成一定夹角。侧向干扰力必须用地面作用在车轮上的等值侧向力来平衡,因为后轮已经滑移,所以侧向力实际上只能作用在前轮上,由侧向干扰力与地面侧向形成的力矩使合力与车辆纵轴线形成的夹角增大,汽车回转趋势增大,处于不稳定状态,易发生甩尾现象;如果前轮抱死,后轮仍继续滚动,则相应的力矩将使上述的夹角减小,车辆处于稳定状态,车辆将继续沿着原来的方向运动,既不易产生侧滑。 2某汽车制动时后轮抱死拖滑,前轮滚动,分析其制动稳定性。 答:如果在制动惯性力基础上还存在一个侧向干扰力,那么合力将与车辆纵轴线成角,侧向干扰力必须用车轮上的等值侧向力来平衡,因为后轮已经滑移,所以侧向力只能作用在前轮上,相应的力矩使车轮绕铅垂轴旋转,并使角增大,车辆回转趋势增大,处于不稳定状态。 3.某汽车制动时,前后轴制动力之比大于前后轴垂直载荷之比,分析其制动稳定性. 答:因为B1/B2> F z1/ F z2,且u=B/F z,说以得u1>u2,即汽车制动时,前轮先抱死后轮继续滚动,若在制动惯性力的基础上还存在一个侧向干扰力,那么合力将与车辆纵轴线成一定夹角,侧向干扰力必须用地面作用在车轮上的等值侧向力来平衡,因为前轮已经抱死,所以侧向力实际上只能作用在后轮上,相应的力矩使上述夹角减小,车辆处于稳定状态,车辆将继续沿着原来的方向运动,即不产生侧滑。 4.某汽车制动时,前后轴制动力之比小于前后轴垂直载荷之比,分析其制动稳定性。 答:因为B1/B2< F z1/ F z2,且u=B/F z,说以得u1 《汽车理论实习》实习报告 别克凯越1.6LE-AT 2011款 综合性能分析 学院: 专业班级: 指导老师: 实习时间: 姓名:学号:成绩: 姓名:学号:成绩: 组员任务分配: 动力性,燃油经济性—— 制动性,操纵稳定性—— 目录 一、别克凯越1.6LE-AT 2011款动力性分析 (2) 1.发动机主要参数 (2) 2.参数计算 (3) 3.驱动力和行驶阻力平衡图 (6) 4.动力特性图 (7) 5.功率平衡图 (8) 二、别克凯越1.6LE-AT 2011款燃油经济性分析 (9) 1.百公里油耗估算 (9) 2.等速行驶百公里燃油消耗量计算 (12) 3.等加速行驶工况燃油消耗量的计算 (13) 4.等减速行驶工况燃油消耗量的计算 (15) 5.数据分析 (16) 三、别克凯越1.6LE-AT 2011款制动性分析 (18) 1.结构参数 (18) 2.参数分析 (18) 四、别克凯越1.6LE-AT 2011款操纵稳定性分析 (22) 1.结构参数 (23) 2.参数分析 (23) 一、别克凯越1.6LE-AT 2011款动力性分析 1.发动机主要参数 整车技术参数 动力参数 2.参数计算 (1)转矩和功率计算 根据发动机的最大功率max e P 和最大功率时的发动机转速p n ,则发动机的外特性的功率e P n --曲线可用下式估算: 23 max 12e e p p p n n n P P C C n n n ?? ??????=+- ? ? ? ???????? ? 汽油机中C1=C2=1, n 为发动机转速(r /min), Pe max =81kw , p n =6000r/min ; 发动机功率Pe 和转矩tq T 之间有如下关系:9549e tq P T n = 可得发动机外特性中的功率与转矩曲线: 一、简答题(每题15分,共45分) 1、汽车可靠性定义四因素的具体内涵是什么? 答:汽车可靠性是指汽车产品(总成或零部件)在规定的条件和规定的时间内,完成规定的功能的能力。 其中,汽车产品指整车、总成、零部件,主要指的是发动机、底盘、车身、电器设备等。规定时间指:汽车使用量的尺度,可以足时间单位(小时、天数、月数、年数),也可以是行驶里程数、工作循环次数等。在汽车运用工程中,保用期、第1次大修里程、报废周期等都是重要的特征时间。 规定条件包括:汽车产品的工作条件,即气候、道路状况、地理位置等环境条件;汽车产品的运用条件,即载荷性质、载运种类、行驶速度;汽车产品的维修条件,即维修方式、维修水平、保养制度;汽车产品的管理条件,即存放环境、管理水平、驾驶员技术水平。规定功能指:汽车设计任务书、使用说明书、订货合同以及国家标准规定的各种功能、性能和要求。 2.简述可靠性预测的步骤。 答:任何预测都有两个过程:归纳和推论过程。可靠性预测的基本步骤如下: (1)确定预测目的、预测对象及预测类型(短期、中期、长期); (2)搜集整理资料(有关发展资料、历史资料); (3)选择预测技术; (4)建立预测模型,包括数学模型(表达式、参数)或概率模型(各种可能结果的概率分布); (5)评价模型。对建立的预测模型进行检验; (6)利用模型进行预测,与实测结果比较,修正预测模型。 3、简述检验的一般工作程序。 答:检验的一般工作程序包括以下阶段: (1)准备阶段 在这阶段,主要工作内容有:决定检查单位,决定检查项目,决定试验方法,决定质量判定标准,决定在生产过程那个阶段检查,决定全检、抽检还是无试验检查,决定质量指标,选择抽样表(计数、计量和抽样类型)。 (2)实施阶段 在这阶段,主要工作内容有:决定批的构成,决定抽样方法,决定批处理方法。 (3)整理阶段 在这阶段,主要工作内容有:决定检查结果的记录方法,决定检查结果的处理方法。 二、论述题(25分) 1.请阐述频数直方图、频率直方图、频率密度直方图和频率密度曲线及区别和联系。 答:频数直方图是以样本数据表征的质量特性值为横坐标,以频数为纵坐标作出的描述数据分布规律的图形。 频率直方图是将频数直方图的纵坐标改为频率做出的频率直方图,其形状与频数直方图应完全一样。 频率密度直方图是将频率直方图纵坐标改为频率密度、横坐标不变后获得的直方图,形状也 《车辆振动与噪声控制》课程教学大纲 课程代码:020242025 课程英文名称:Control of Vehicle Vibration and Noise 课程总学时:32 讲课:26 实验:6 上机:0 适用专业:车辆工程装甲车辆工程能源与动力工程交通运输 大纲编写(修订)时间:2017.5 一、大纲使用说明 (一)课程的地位及教学目标 车辆振动与噪声控制是车辆工程专业、装甲车辆工程、能源与动力工程和交通运输专业的专业选修课。面对激烈竞争的汽车市场,除了提高汽车的各项性能指标和经济指标外,降低汽车振动与噪声,提高汽车运行舒适度已成为现代汽车设计及新技术开发研究的一个重要方面。本课程的主要任务是使学生了解并掌握汽车振动的基本要素;单自由度、二自由度及多自由度振动的基本特性;随机振动的统计特性及汽车的平顺性分析。通过本课程的学习,能培养学生对工程实际问题观察、分析及解决的能力,为从事专业设计与研究打下坚实的基础。 (二)知识、能力及技能方面的基本要求 通过本课程的学习,学生要对本课的基本内容有系统的理解,掌握其基本概念、理论和方法,运用这些理论分析,解决工程实际问题,并达到如下要求: 1.具有建立典型汽车结构力学模型的能力,并能够确定其边界条件和初始条件。 2.掌握模型系统的模态分析与响应分析方法。 (三)实施说明 教师在授课过程中可以根据实际情况酌情安排各部分的学时,课时分配表仅供参考。教师要注重对基本概念、基本方法和解题思路的讲解,以便学生在实际应用中能举一反三,灵活运用。根据专业特点,教师应结合实际问题,在教学过程中注意理论与实际结合,突出实际应用。 (四)对先修课的要求 本课程的先修课程有《高等数学》等相关课程。 (五)对习题课、实验环节的要求 结合有关章节中的重点和难点问题以及典型的问题,安排一定的习题练习,并以讲、练、讨论相结合的方式进行。引导学生对所学内容的基本概念、基本原理和基本方法有更加深入的了解。结合每次课的内容、重点和难点,有针对性的布置与有关实际问题相联系的思考题。 (六)课程考核方式 1.考核方式:考查。 2.考核目标:考核学生对单自由度及多自由度振动基本原理掌握情况,在此基础上掌握模态分析的基本理论。通过对汽车模型的简化,在一定路面激励下,分析汽车的平顺性。 3.成绩构成:本课程的总成绩主要由两部分组成:平时成绩占10%,实验成绩占10%,考试成绩占80%。 平时成绩由任课教师视具体情况按百分制给出。 (七)主要参考书目: 汽车理论大作业3 汽车理论大作业 题目:燃油经济性计算 指导老师:侯永平 作者:徐宁 学号:081828 2011年11月 题目内容: 负荷特性曲线的拟合公式为: 234 b,B,BP,BP,BP,BP eeee01234 式中,b为燃油消耗率[g,(kw. h)]; Pe为发动机净功率(kw) 拟合式中的系数为 Q,0.299mL/s怠速油耗 (怠速转速400r/min)。 id 计算与绘制题1.3中货车的 1)汽车功率平衡图。 2)最高档与次高挡的等速百公里油耗曲线。 3)利用计算机求货车按JB3352,83规定的六工况循环行驶的百公路油耗。计算中确定燃油消耗率值b时,若发动机转速与负荷特性中给定的转速不相等,可由相邻转速的两根曲线用插值法求得。 一、绘制汽车功率平衡图 有效转速n=600—4000(r/min)。 ua=0.377rn/ii(km/h)。不同档位取不同。i g0g根据拟合公式分别求出各转速对应的转矩Tq=-19.313+295.27(n/1000)-165.44(n/1000)2+40.874 (n/1000)3-3.8445(n/1000)4(N/m)。再根据公式Pe=Ttq×n/9550(kw)求出净功率。然后依次描点就得到汽车各档功率曲线。发动机输出功率与阻力功率相平衡。 Pe=1/η(Gfu/3600+CDAua3/76140+Giu/3600+δmua/3600) aaa绘制功率平衡图时只考虑P和P,所以 fw Pe=1/η(Gfu/3600+CDAua3/76140) a 利用公式分别求出各点阻力功率,并描点画图,得到阻力曲 线。 二、求最低档和最高档的等速百公里曲线 由已知条件 234 b,B,BP,BP,BP,BPeeee01234 “计算中确定燃油消耗率值b时,若发动机转速与负荷特性中给定的转速不相等,可由相邻转速的两根曲线用插值法求得。”得: b的线性差值等同于B0,B1,B2,B3的线性差值,并依次为原理,编写了函数: 汽车运用工程大作业 1汽车动力性计算(加速性能、最高车速、动力因素-加速时间和加速距离)已知:发动机外特性、装载质量、整备质量、总质量、车轮半径、传动系效率、滚动阻力系数、空气阻力系数泌风面积、主减速器速比飞轮转动惯量、两个前轮转动惯量、四个后轮转动惯量、变速器速比、轴距、质心至前轴距离、质心高度。 例如,已知数据如下表: Tq=a+a1(n/c)+a2(n/c)2+a2(n/c)3+a3(n/c)4 1)绘制汽车驱动力与行驶阻力平衡图; 2)求汽车的最高车速、最大爬坡度; 3)绘制加速度倒数曲线 4)用图解法或编程绘制汽车动力因数特性曲线 5)图解手工或编程绘制II 档起步,加速至70km/h 的车速一时间曲线以及距离一 时间曲线。 解 :轻型货车的有关数据: 汽油发动机使用外特性的Tq-n 曲线的拟合公式为 Tq=a+a1( n/c)+a2( n/c)*(n /c)+a3( n/c)*( n/c)*( n/c)+a4( n/c)*(n /c)*( n/c)*( n/c) 式中,Tq 为发动机 转矩(N?m ) ;n 为发动机转速(r/min )。 汽车的牵引力: 空气阻力: 汽车的滚动阻力: F f G a mg 为满载或空载汽车总重(N), f 为滚动阻尼系数汽车的 行驶阻力之和F r : F r F f F w ( N ) Matlab 程序: (1) 求汽车驱动力与行驶阻力平衡图和汽车最高车速程序: 五档车程序如下 n=[600:10:4000]; Tq=-19.3+296*( n/1000)-165*(门/1000)八2+40.9*(门/1000)八3-3.85*( n/1000).M; m=3695;g=10; nmi n=600; nm ax=4000; G=m*g; ig=[3.55 2.77 1.65 1.00 0.83]; nT=0.8924;r=0.37;f=0.0096;CDA=2.60;i0=5.83; L=3.40;a=2.0;hg=0.9;If=0.22;Iw1=1.80;Iw2=3.60; Ft 仁 Tq*ig(1)*i0* nT/r; Ft2=Tq*ig(2)*iO* nT/r; u ai 0.377 i gi i (km/h ) 其中:r k 为车轮滚动半径, m; 错误!未指定书签。 F ti ( U a ) T tq (U a ) i gi i ° (N )汽车的 C d A 21.15 2 U a 其中:C d 为空气阻力系数,A 为汽车迎风面积, m 2 其中:G a = 汽车振动学复习题 一、填空题 1、不同情况进行分类,振动系统大致可分成(线性振动)和非线性振动;确定振动和(不确定振动);(自由振动)和强迫振动;周期振动和(非周期振动);(连续系统)和离散系统。 2、在离散系统中,弹性元件储存(势能),惯性元件储存(动能),(阻尼)元件耗散能量。 3、周期运动的最简单形式是(简谐振动),它是时间的单一(正弦)或(余弦)函数。 4、叠加原理是分析(线性系统)的振动性质的基础。 5、叠加原理在( 线性振动系统 )中成立,在一定的条件下,可以用线性关系近似( 非线性关系 )。 6、系统的固有频率是系统(本身)的频率,它只与系统的(刚度)和(质量)有关,与系统受到的激励无关。 7、周期运动可以用( 简谐函数 )的( 级数 )形式表示。 8、根据系统、激励与响应的关系,常见的振动问题,可以分为( 振动设计 )、( 系统识别 )和( 环境预测 )三类基本课题。 二、简答题 1、简述振动系统的实际阻尼、临界阻尼、阻尼比的联系与区别。 答:实际阻尼是指振动系统的真实阻尼值,用于度量系统自身消耗振动能量的能力;临界阻尼是概念阻尼,是指一个特定的阻尼值,大于或等于该阻尼值,系统的运动不是振动,而是一个指数衰运动;阻尼比等于实际阻尼与临界阻尼之比。 2、在分析振动系统时,为什么要进行线性化处理?线性化的方法有哪些? 答:P2 3、多自由度系统振动的振型指的是什么? 机械系统某一给定振动模态的振型,指在某一固有频率下,由中性面或中性轴上的点偏离其平衡位置的最大位移值所描述的图形。 4、简述线性多自由度系统动力响应分析方法。 多自由度系统在外部激励作用下的响应分析称为动力响应分析;常用的动力响应分析方法有振型叠加法和变换方法(傅里叶变换或拉普拉斯变换);当系统的质量矩阵、阻尼矩阵、刚度矩阵可以同时对角化的时候,可以把系统的运动微分方程解藕,得到一组彼此独立的单自由度运动微分方程,求出这些单自由度运动微分方程的解后,采用振型叠加,即可得到系统的动力响应;傅里叶变换或拉普拉斯变换就是对各向量做傅里叶变换和拉普拉斯变换,得到的系统的频响函数矩阵或传递函数矩阵,然后进行傅里叶逆变换或拉普拉斯逆变换得到系统的响应。 5、机械振动系统的固有频率与哪些因素有关?关系如何? 答:机械振动系统的固有频率和系统的质量矩阵、刚度矩阵和阻尼有关。质量越大,固有频率越低;刚度越大,固有频率越高;阻尼越大,固有频率越低。 6、什么是隔声过程的“吻合效应”?它和隔声中的结构共振有何不同? 7、阻性消声器与抗性消声器的本质区别是什么?在使用时要注意什么问题? 8、何为车轮的陀螺效应?对前轮摆振有何影响? 9、简析影响汽车平顺性的结构因素。 P178:题6.2、题6.3 P189:题7.1、题7.4 P216:题8.1、题8.5 第一章 1、汽车的运用效果指汽车完成运输工作所带来的经济效益和社会效益,也指由于汽车出行的便捷和迅速给人们所带来的满足程度。 从汽车运用宏观效果来看,主要包括汽车运输生产率、汽车运输成本和汽车运输质量三大指标。 2、汽车运输品质 安全、准确、迅速、经济、便利、舒适、清洁、文明服务 3、汽车运输对道路条件的基本要求是: ①充分发挥汽车的速度性能;②保证车辆的安全行驶;③满足最大通行能力要求;④车辆通过方便,乘客乘坐舒适;⑤车辆运行材料消耗最低,零件的损坏最小。 4、驾驶操作技术水平 驾驶员的汽车驾驶操作技术是一项综合性技术,汽车驾驶操作水平高低明显地影响汽车零件磨损、燃料经济性和污染物排放,因而影响汽车的运用效果。 5、比功率 是衡量汽车动力性能的一个综合指标,具体是指汽车发动机最大功率与汽车总质量之比,比功率越大,则动力性能越好。 (P52) 6、汽车整备质量 汽车整备质量指汽车完全装备好的质量(kg )。除装备有发动机、底盘、车身、电器设备和辅助设备的完整车辆,及加足的润滑油、燃料、冷却液的质量外,还包括随车工具、备用轮胎及其他备用品的质量。提高整备质量利用系数的措施有:不断完善汽车结构和制造技术;利用轻型材料;提高汽车载质量 第二章 1. 汽车的动力性是指汽车在良好路面上直线行驶时由汽车受到的纵向外力决定的所能达到的平均行驶速度,表示汽车以最大可能平均行驶速度运送货物或乘客的能力。 汽车的动力性评价指标有:汽车的最高车速,km/h ; 汽车的加速时间,s ;汽车的最大爬坡度,%。 汽车的最高车速指汽车在水平良好的路面(混凝土或沥青路面)上所能达到的最高行驶速度。汽车加速时间分为原地起步加速时间和超车加速时间最大爬坡度是指满载时汽车以Ⅰ挡在良好路面上所能通过的最大坡度。 2 、变速器速比 、主传 动系速比 、机械效率 、车轮半径r 。 =车轮转动的圈数 S ——滚动圈时车轮前进的距离,m Pe=发动机输出功率 Pw=损耗功率 3、汽车的行驶阻力 t g i i η???0e T g i 0i t ηr n 汽车理论大作业 计算任务书 题目: 第一题汽车动力性能的计算 确定一轻型货车的动力性能(货车装用5档变速器) 1.绘制汽车驱动力与行驶阻力平衡图。 2.求汽车最高时速,最大爬坡度及克服该爬坡度时对应的附着率。 3.绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速至70km/h的车速- 时间曲线,或者用计算机求汽车用2档起步加速至70km/h的加速时间。 轻型货车的有关数据: 汽油发动机使用外特性的Tq-n曲线的拟合公式位: Tq=-19.313+295.27(n/1000)-165.44(n/1000)2+40.874(n/1000)3-3.8455(n/1000)4 式中,Tq为发动机的转矩(N*m);n位发动机的转速(r/min)。 发动机的最低转速nmin=600r/min,最高转速nmax=4000r/min 装备质量2000kg 整车装备质量1800kg 总质量3880kg 车轮半径0.367m 传动系机械效率nT=0.85 滚动阻力系数f=0.013 空气阻力系数*迎风面积CDA=2.77m2 主减速器传动比i0=5.83 飞轮转动惯量If=0.218kg*m2 2前轮转动惯量Iw1=1.798kg*m2 4后轮转动惯量Iw2=3.598kg*m2 变速器传动比Ig(数据如下表) 1档2档3档4档5档 4档变速器 6.03 3.03 1.67 1 ---- 轴距L=3.2m 质心至前轴距离(满载) a=1.947m 质心高(满载) hg=0.9m 第二题: 第三题: 计算 1.确定一轻型货车的动力性能 1.1绘制汽车驱动力与行驶阻力平衡图 1.1.1发动机转矩 1.汽油发动机使用外特性的Tq-n曲线拟合公式为: Tq=-19.313+295.27(n/1000)-165.44(n/1000)2+40.874(n/1000)3-3.8455(n/1000)4 2.式中,Tq为发动机的转矩(N*m);n位发动机的转速(r/min)。 发动机的最低转速nmin=600r/min,最高转速nmax=4000r/min 2.发动机的转矩:将转速带入汽油发动机使用外特性的Tq-n曲线拟合公式,取转速间隔 为100r/min,得发动机转矩表如下: 汽车运用工程大作业 (一)汽车动力性计算 (1)绘制汽车驱动力与行驶阻力平衡图 r i i T g η0tq T Ft = ;4 43 32 21)/()/()/()/(c n a c n a c n a c n a a T tq ++++=;r u i i a g 377.0n 0= ;其他参 数已知;又以上条件可求出Ft ,并画出a u t F -图形。 15 .212 a D w f Au C f G F F +=+;参数均已知,可求出a w f u F F -+) (图形。 数据表格见:《附表一》 (2)求最高车速max a u 令Ft=Ff+Fw,得到方程058.62968.17316.4042.01065.12 34 4 -=+-?+?-?a a a a u u u u 使用MATLAB 求解 >> p=[0.000165,-0.042,4.16,-173.68,629.58] p = 0.0002 -0.0420 4.1600 -173.6800 629.5800 >> px=poly2str(p,'x') px = 0.000165 x^4 - 0.042 x^3 + 4.16 x^2 - 173.68 x + 629.58 >> format rat% >> r=roots(p) r = 17290/159 8296/117 +11840/193i 8296/117 -11840/193i 2782/697 max a u =108.7km/h. 这与从驱动力—行驶阻力平衡图观察结果一致。 最大爬坡度max i 的求解见(4)。 (3)绘制加速度倒数曲线 )(1w f t F F F m du dt a +-==δ,其中 2 2 2 022 67.4844.401g T g f w i r i i I r I m +=+ +=∑ ηδ 12.61=g i , 43242.192.5817.96208.650556.201735.18631a a a a u u u u a -+-+-=; 11.32=g i , 432048.093.364.12185.167954.120118.5111a a a a u u u u a -+-+-=; 69.13=g i , 4320023.034.062.1905.49663.81645.1791a a a a u u u u a -+-+-=; 00.14=g i , 432000165.0042.016.468.17358.62911.891a a a a u u u u a -+-+-=; 由以上条件绘出 a u -a 1 图形如下: 数据表格见:《附表二》 汽车理论第一次作业 1-3. 确定该轻型货车的动力性能(货车可装用4挡或 5挡变速器,任选其中的一种进行整车性能计算)。 1) 绘制汽车驱动力—行驶阻力平衡图; 2) 求汽车最高车速、最大爬坡度及克服该坡度时相应的附着率; 3) 绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用 2 挡起步加速行驶至70km/h 的车速—时间曲线,求汽车用2挡起步加速行驶至70km/h 的时间。 轻型货车的有关数据: 汽油发动机使用外特性的 Tq ? n 曲线的拟合公式为 tq T =-19.313+295.27( 1000n )-165.44(1000n )2+40.8747(1000n )3-3.8445(1000 n )4 式中,q T 为发动机转矩(N·m);n 为发动机转速(r/min )。 发动机的最低转速600r/min ,最高转速4000r/min 。 该车的其他基本参数如表 1-3 所示。 表 1-3某轻型货车的基本参数 变速器(4挡和 5挡)的传动比g i 如表 1-4所示。 解: 1)绘制汽车驱动力与行驶阻力平衡图 。 驱动力矩 tq T =-19.313+295.27( 1000n )-165.44(1000n )2+40.8747(1000n )3-3.8445(1000 n )4 主减速器传动比 0i =5.83 车速 Ua=0.377n*r/(g i *i0) 驱动力 Ft=tq T *g i *0i *ηt /r 行驶阻力(不考虑爬坡因素,加速阻力) Ff+Fw=Gf+A C D *Ua^2/21.15 整合以上信息可得 当一档行驶时:g i =5.56时, 2.561≦Ua ≦17.074 当二挡行驶时:g i =2.769时,5.142≦ 汽车振动系统的分析研究* 左万里苏小平田海兰 (南京工业大学机械与动力工程学院,南京210009) Research of the vehicle vibration system ZUO Wan-li ,SU Xiao-ping ,TIAN Hai-lan (School of Mechanical and Power Engineering ,Nanjing University of Technology ,Nanjing 210009,China ) 文章编号:1001-3997(2011)02-0112-02 【摘要】建立前轮为独立悬架,后轮为非独立悬架汽车的七自由度动力学模型,并给出该模型所 需要的质量特性与运动学特性参数。由给出的运动微分方程, 利用仿真分析得出车身的振动加速度图。研究结果表明,建立的汽车振动系统动力学模型是有合理的。 关键词:汽车;系统动力学;数学模型 【Abstract 】A seven-degrees-of-freedom dynamic model of the car which front wheel with indepen -dent suspension and rear wheel with dependent suspension is presented,then the mss parameters and move -ment characteristics parameters that the model need is given.According to the differential equations of mo -tion ,the vibration acceleration diagram of vehicle body is obtained via simulation analysis.The results showed that the dynamic model of vehicle vibration system is reasonable. Key words :Vehicle ;System dynamics ;Mathematic model 中图分类号:TH16文献标识码:A *来稿日期:2010-04-02*基金项目:江苏省高技术研究重点实验室项目BM2007201 1引言 振动是现代汽车面临的一个重要问题,随着汽车速度和人们对生活要求的不断提高,人们对降低汽振动的要求也越来越高。了解掌握汽车动态特性及其结构参数之间的关系,是对汽车进行减振优化设计的前提。为此,对某一带有非独立悬的中型客车,进行了一些研究。 以某中型客车为原型,其前悬为双横臂独立悬架,后悬为板簧悬架。假设车身是一个刚体,当车辆在不平路面做匀速直线运动时,车身具有上下跳动,俯仰,侧倾3个自由度,两个前轮分别具有垂向运动的自由度,后轴具有垂向跳动和侧倾转运2个自由度,计系统共有七个自由度。 2系统的运动方程 带非独立悬架的七自由度整车模型示意图,如图1所示。 a B f y K fr C fr x ufr x fr x x rfr K tfr φ θ z m fr x rl x ufl x rfl K tfl m fl C fl K fl K rl x url x rl C rl x rrl m rl K trl B r K rr x rr b C rr x urr x rrr m rr K trr x ur γ 图1汽车振动系统简化模型 图中:K fl 、K fr 、K rl 、K rr —前后悬加的刚度系数;C fl 、C fr 、C rl 、C rr —前后悬 架的阻尼系数;m fl 、m fr 、m rl 、m rr —前后悬架的簧下质量;K tfl 、K tfr 、K trl 、K trr —四个轮胎的垂直刚度。考虑到汽车的左右对称性,假定K fl =K fr =K f ,K rl =K rr =K r ;C fl =C fr =C f ,C rl =C rr =C r ;m fl =m fr =m f , m rl =m rr =m r ,K tfl =K tfr =K trl =K trr =K t 。m s —车身质量;a 、b —车身质心到前轴和后轴的距离;B f —前轴轮距;B r —后轴轮距;x —车身质心的垂直位移, θ—车身的俯仰角位移;φ—车身的侧倾角位移。x ufl 、x ufr 、x url 、x urr —前后悬架簧下质量的垂直位移;x fl 、x fr 、x rl 、x rr —前后悬架簧上质量的垂直位移;x ur —后桥质心的垂直位移; γ—后桥质心的倾角位移[1]。在俯仰角θ和侧倾角φ较小时,车身四个端点处的垂向位移有如下关系:x fl =x-a θ-1B f φ(1) x fr =x-a θ+12 B f φ(2) x rl =x+b θ-12 B r φ(3) x rr =x+b θ+1B r φ(4) 后桥质心回转运动与垂直位移方程为:γ=X url -X urr (5) X ur =X url +X urr 2 (6) 因此,车身质心处的垂向运动方程为: m s x 咬=C f x 觶fl -x 觶ufl r r +K f x fl -x ufl r r +C f x 觶fr -x 觶ufr r r +K f x fr -x ufr r r +C r x 觶rl -x 觶url r r +K r x rl -x url r r +C r x 觶rr -x 觶urr r r +K r x rr -x urr r r (7) 车身俯仰运动方程为: I zz θ咬=C r x 觶rl -x 觶url r r +K r x rl -x url r r +C r x 觶rr -x 觶urr r r +K r x rr -x urr r r r r b-a C f x 觶fl -x 觶ufl r r +K f x fl -x ufl r r +C f x 觶fr -x 觶ufr r r +K f x fr -x ufr r r r r (8)车身侧倾运动方程: I yy φ咬=C f x 觶fr -x 觶ufr r r +K f x fr -x ufr r r +C f x 觶fl -x 觶ufl r r +K f x fl -x ufl r r r r ×12B f +C r x 觶rr -x 觶urr r r +K r x rr -x urr r r +C r x 觶rl -x 觶url r r +K r x rl -x url r r r r ×12 B r (9)Machinery Design &Manufacture 机械设计与制造 第2期2011年2月 112汽车理论大作业.
汽车可靠性技术(大作业)
《车辆振动与噪声控制》课程教学大纲
汽车理论大作业3
汽车运用工程-汽车动力性的应用
汽车振动学复习题
汽车运用工程
汽车理论大作业
汽车运用工程综合大作业 2
吉林大学汽车理论第一次作业
汽车振动系统的分析研究