用于不平路面车辆动力学仿真的轮胎模型综述
2004041
用于不平路面车辆动力学仿真的轮胎模型综述
管迪华 范成建
(清华大学,汽车安全与节能国家重点实验室,北京 100084)
[摘要] 介绍了轮胎在不平路面的动力学特性。在回顾不平路面轮胎动力学模型发展的基础上,以近期的研究工作为重点,对用于不平路面车辆动力学仿真的轮胎模型进行了较为系统的介绍。概要地阐述了各种轮胎模型的建模理论、方法,并进行了分析和评述。最后,总结了不平路面轮胎力学建模的核心问题及发展方向,对不平路面车辆动力学仿真选择合适的轮胎模型给出了建议。
叙词:轮胎,模型,车辆动力学,仿真
A Review of T ire M odels for V ehicle Dynamics Simulation on U neven Road
Guan Dihua &Fan Chengjian
Tsingh ua Univ ersity ,S tate K ey L aboratory of A utomotive Safety and Energy ,Beij ing 100084
[Abstract] The dynamic properties of tire on uneven road are presented Different tire models for vehicle dynamics simulation on uneven road are discussed based on a review of their evolution Various modeling theory and methods of tire models are analyzed Some key problems and developing direction of tire modeling are summed up and a few suggestions for the choice of proper tire model for vehicle dy namics simulation on uneven road are made
Keywords:Tire,Model,Vehicle dynamics,Simulation
原稿收到日期为2002年10月14日,修改稿收到日期为2003年5月28日。
1 前言
轮胎是汽车重要的部件,轮胎的结构参数和力学特性决定着汽车的主要行驶性能。除空气作用力
和重力外,几乎所有其它影响汽车运动的力和力矩都通过滚动的轮胎与地面相互作用而产生。轮胎所受的垂直力、纵向力、侧向力和回正力矩对汽车的平顺性、操纵稳定性和安全性起着重要的作用。随着力学、计算数学、计算机技术及其它相关技术的发展,影响汽车行驶性能的其它部件的力学特性在理论上都已得到较好的解决。随着汽车技术现代化的发展,尤其是随着CAE 技术的发展,人们已经能够建立复杂、精确的车辆动力学模型对具体问题进行仿真研究,这些问题包括:
(1)操纵动力学
(2)试验场仿真(Proving Ground Simulation),包括噪声、振动和冲击(NVH)及耐久性(Durability)
(3)制动力与牵引力控制(ABS,TCS)
(4)轮胎磨损。
在任何整车动力学模型中,轮胎模型都是一个重要的部分。因此轮胎模型的精确程度必须与车辆模型的精度相匹配。由于轮胎具有结构的复杂性和力学性能的非线性,开发符合实际又便于使用的轮胎模型仍是整车动力学模拟的关键难题,也是汽车行业急需解决的问题之一。
2 轮胎在不平路面的动力学特性
人们很早就注意到当刚性车轮滚过一个障碍物时会突然产生很大的垂直加速度,对于充气轮胎的试验研究则发现这种冲击要小得多。很明显轮胎具
2004年(第26卷)第2期
汽 车 工 程
Automotive Engineer ing
2004(Vol.26)No.2
有某种能力使它滚过障碍物时能够部分地 包容 障碍物。轮胎对障碍物的这种缓冲能力被称为包容特性。
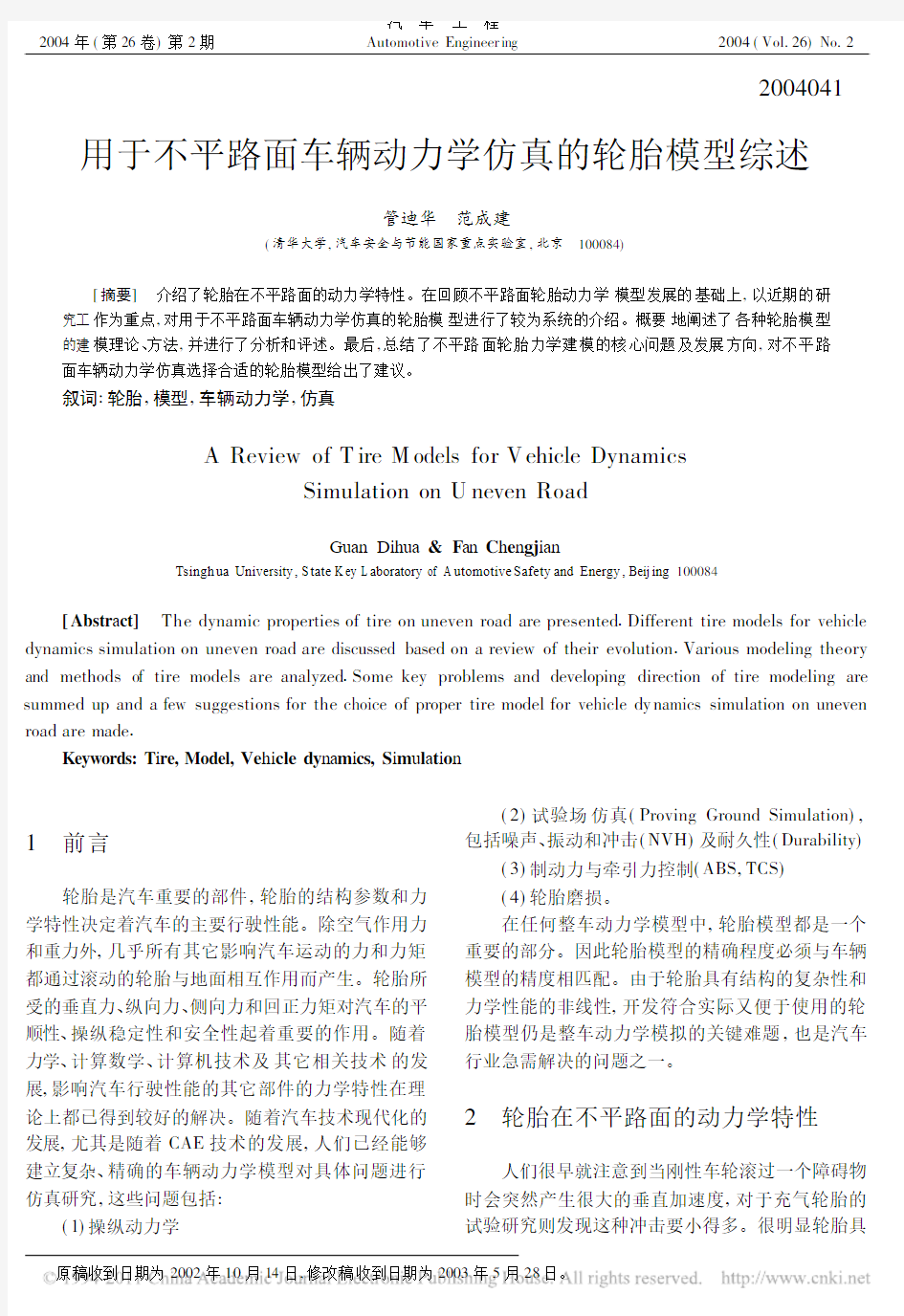
轮胎包容特性的好坏通常用轮轴处的力响应来衡量。其测量方法为:固定轮心高度,让轮胎缓慢滚过一定形状的凸块(如三角形或阶跃形凸块),测定轮轴处的垂直力和纵向力。图1给出了轮胎滚过障碍物时典型的轴荷变化。x 轴为障碍物在印迹中的位置,y 轴为轮胎的下沉量,z 轴为轴荷,O 为印迹中心。从图中可以看到,在变形小的情况下垂直轴荷只有一个高的峰值,而在变形量增加时有两个峰值,在障碍物接近印迹中心时,垂直轴荷变得非常小,甚至为负值(即低于没有障碍物而把轮胎压向水平路面时的值)
。
图1 轮胎缓慢滚过障碍物时的轴荷响应
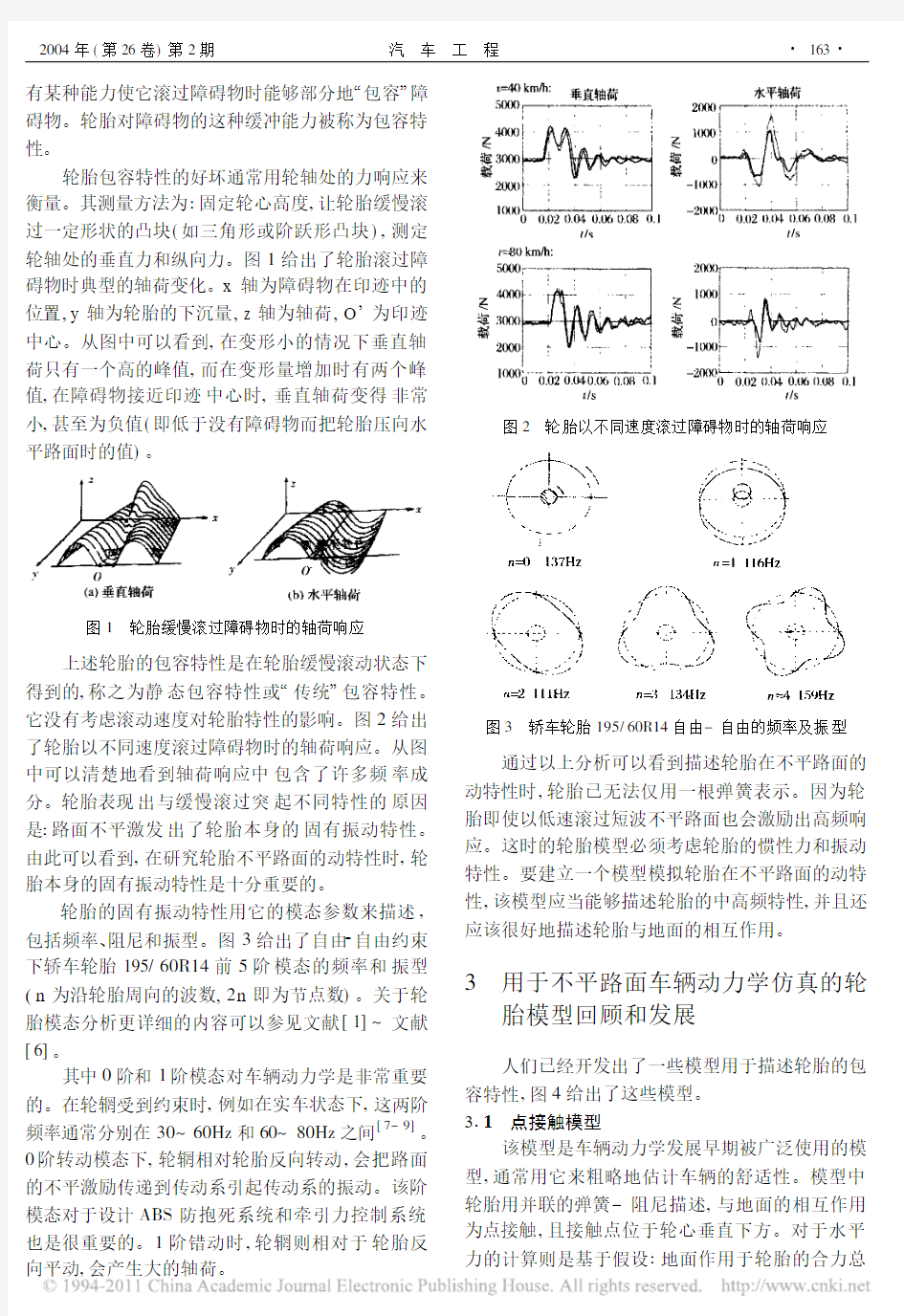
上述轮胎的包容特性是在轮胎缓慢滚动状态下得到的,称之为静态包容特性或 传统 包容特性。它没有考虑滚动速度对轮胎特性的影响。图2给出了轮胎以不同速度滚过障碍物时的轴荷响应。从图中可以清楚地看到轴荷响应中包含了许多频率成分。轮胎表现出与缓慢滚过突起不同特性的原因是:路面不平激发出了轮胎本身的固有振动特性。由此可以看到,在研究轮胎不平路面的动特性时,轮胎本身的固有振动特性是十分重要的。
轮胎的固有振动特性用它的模态参数来描述,包括频率、阻尼和振型。图3给出了自由 自由约束下轿车轮胎195/60R14前5阶模态的频率和振型(n 为沿轮胎周向的波数,2n 即为节点数)。关于轮胎模态分析更详细的内容可以参见文献[1]~文献[6]。
其中0阶和1阶模态对车辆动力学是非常重要的。在轮辋受到约束时,例如在实车状态下,这两阶频率通常分别在30~60Hz 和60~80Hz 之间[7-9]。0阶转动模态下,轮辋相对轮胎反向转动,会把路面的不平激励传递到传动系引起传动系的振动。该阶模态对于设计ABS 防抱死系统和牵引力控制系统也是很重要的。1阶错动时,轮辋则相对于轮胎反
向平动,会产生大的轴荷。
图2 轮胎以不同速度滚过障碍物时的轴荷响应
图3 轿车轮胎195/60R14自由-自由的频率及振型
通过以上分析可以看到描述轮胎在不平路面的动特性时,轮胎已无法仅用一根弹簧表示。因为轮胎即使以低速滚过短波不平路面也会激励出高频响应。这时的轮胎模型必须考虑轮胎的惯性力和振动特性。要建立一个模型模拟轮胎在不平路面的动特性,该模型应当能够描述轮胎的中高频特性,并且还应该很好地描述轮胎与地面的相互作用。
3 用于不平路面车辆动力学仿真的轮
胎模型回顾和发展
人们已经开发出了一些模型用于描述轮胎的包容特性,图4给出了这些模型。
3 1 点接触模型
该模型是车辆动力学发展早期被广泛使用的模型,通常用它来粗略地估计车辆的舒适性。模型中轮胎用并联的弹簧-阻尼描述,与地面的相互作用为点接触,且接触点位于轮心垂直下方。对于水平力的计算则是基于假设:地面作用于轮胎的合力总
163 2004年(第26卷)第2期 汽 车 工 程
是指向地面的法线方向。该模型可用于低频(0 1~2H z)的垂直轴荷计算,且路面波长大于3m [10,11]
。
图4 用于仿真轮胎在不平路面特性的模型
3 2 滚子接触模型
滚子接触模型包括两种:刚性滚子模型[11,12]和弹性滚子模型[13]。刚性滚子模型与点接触模型相似,不同之处在于它用一个直径等于轮胎直径的滚子来描述轮胎与地面的接触。这样轮胎与地面的接触点不再是严格位于轮心垂直下方。由于滚子对地面的滤波作用。轮心的位移不等于地面垂直高度。它的计算效果要优于点接触模型[11,12]。但是,这种滤波是完全几何的,而不是动力学的,因此在高频时计算的轴荷过高,且只适用于水平力很小的工况。弹性滚子模型与刚性滚子模型的不同之处在于考虑了印迹内的分布垂直刚度。它的性能要优于刚性滚子模型。3 3 固定印迹模型[11]
固定印迹模型对轮胎的描述是用沿着印迹长度分布的弹簧和阻尼单元,用长度不变的印迹描述轮胎与地面的相互作用,即印迹长度不随路面不平度的变化而改变。与滚子模型相比,固定印迹模型使用了印迹长度而不是轮胎半径来滤波,且印迹中心位于轮心下方。对于水平力的计算则是基于假设:地面作用于轮胎的合力总是指向轮心。该模型在高频计算时的垂直轴荷偏低。3 4 径向弹簧模型
径向弹簧模型使用沿着轮胎周向分布的,彼此独立的弹簧描述轮胎特性。弹簧的特性可以是线性的或者是非线性的。Badalamenti [14]改进了径向弹簧模型,它让相邻的弹簧之间不再独立,从而使得径向弹簧的变形依赖于相邻弹簧的变形。
3 5 等效平面模型
Davis 于1974年提出了等效平面模型[15],它也是很长一段时间ADAM S 软件提供的唯一可用于耐
久性仿真的轮胎模型[16]。它基于径向弹簧模型,但是在不平路面接触问题的处理上明确提出了等效路形的方法。这种方法是根据某种规则对原始不平路面进行处理得到等效路形,也就是轮胎模型的当量输入,使得轮胎模型在当量输入下的响应与在真实路面激励下的响应一样。等效路形为解决轮胎包容问题提供了一种重要思路。它的优点在于计算速度快,可以满足实时的要求。但是,等效路形的提出是从所建具体模型出发,因此不同轮胎模型的等效路形并不相同,而等效路形的研究需要大量的试验。实际上滚子模型,固定印迹模型也都是利用滚子和印迹对原始路形进行预处理求出当量路形,从而得到了有效路形输入下的点接触模型。
上述这些模型在精度上存在差别,它们在建模特点上可以归纳为:把轮胎简化为弹簧-质量系统,再加上一个可以滤掉不平路面高频成分的滤波模型。文中把这些模型称为传统模型。
人们对轮胎在不平路面特性的研究开始于20世纪60年代,代表人物是Goug h [17]和Lipp mann [18]。他们通过试验研究了轮胎滚过短波不平路面的特性,此后一直到20世纪80年代中期,20多年的时间里在仿真整车振动和耐久性时使用的主要就是上述传统模型,也就是说没有开发出一种可用于仿真轮胎高频特性的模型。这一方面是因为操纵动力学在车辆动力学的研究中占有主要地位,在一段时间它几乎成为车辆动力学的代名词,而操纵稳定性研究的频率范围只有几赫兹(摆振除外),不需要高频的模型;另一方面20世纪90年代以前CAE 技术不是很成熟,汽车行业在解决整车的振动、冲击和耐久性的主要手段还是试验,没有对高频轮胎模型的迫切需求。计算机科技的发展为工程技术的发展提供了广阔的发展途径,尤其是产品开发的CAE 技术,通过模拟设计可大大缩短产品开发周期,获得巨大的经济效益。整车的动力学仿真对轮胎模型提出了高的要求。如VPG(Virtual Proving Ground)要求频带高达100Hz,且能实现时域仿真,对耐久性仿真要求更高,它要求时域上(包括幅值和相位)的准确性。同时,各种先进的汽车底盘控制系统得到了不断地开发和应用,而精确的适用于更高频率的轮胎模型是进行这些研究和开发的主要基础。20世纪80年代末以来,人们开始研究开发一些新的模型来描述轮胎在不平路面的动态特性,其中具代表性的是环模型,直接模态参数模型和有限元模型。
164 汽 车 工 程 2004年(第26卷)第2期
3 6
环模型
图5 环模型
图5所示为轮胎的环模型。将轮胎简化为环模型有其结构上的背景,现代轮胎基本上为子午线轮胎,从结构上来看,子午线轮胎是由高强度周向布置的带束和子
午线方向布置的胎体构成。因此作为一种近似,可将其简化为弹性基础上的圆环进行分析。其中环代表胎冠部分,弹性基础(由径向和周向弹簧代表)代表胎侧和充气效应。圆环和刚性轮辋之间由弹簧连接。轮胎的面内动力学特性就可以借助这种模型来进行分析。文献[19]和文献[20]对环模型进行了深入的论述,具体公式的推导详见这两篇文献。轮胎的环模型在20世纪60年代提出[21-23],在20世纪70年代加以改进[24,25]。这些模型主要用来研究轮胎本身的振动特性,它们的模型都非常复杂(需要求解高阶偏微分方程),在处理轮胎与地面的相互作用时通常使用简单的接触模型,在当时这些模型基本上未在车辆动力学仿真中得到应用。此后经过完善发展到现在[9,19,26-28]
。目前环模型已经成为轮胎
力学研究的热点,也是国际上仿真轮胎在短波不平路面动特性的主流模型。其中最具代表性的是SWIFT (Short Wave Intermediate Frequency Tire M odel)[9,29]和FTIRE (Flex ible Ring Tire Mod el)[30-32]模型。3 7 SWIFT 模型
SWIFT 模型是由荷兰Delft 工业大学和TNO 联合开发的。ADAMS12 0中提供了该模型。它是一个刚性环模型。所谓刚性是指在环模型的基础上只考虑轮胎的0阶转动和1阶错动这两阶模态,此时轮胎只作整体的刚体运动而并不发生变形。在只关心轮胎的中低频特性时这样是可以满足要求的。由于不需要计算胎体的变形,刚性环模型的计算效率大大提高,可以用于硬件在环仿真进行主动悬架和ABS 的开发。在处理面外动力学问题时,SWIFT 使用了魔方模型。因此它可以用于研究一些复杂的工况,例如:不平路面的侧偏和ABS 制动。在处理轮胎-地面的接触问题时,SWIFT 采用了等效路形的方法。与前面所介绍的等效路形不同之处在于:SWIFT 模型所用的等效路形是由一个专门的包容
模型算出来的。关于这方面的详细内容可以参考文献[9]。所以,SWIFT 模型要自带一个包容模型来提供等效路形。
3 8 FTIRE 模型
FT IRE 是由德国Esslingen 大学的M ichael Gipser 领导的小组开发的。从名字可以看到它是基于柔性环模型,即它从本质来说是一个物理模型。所谓柔性是与刚性相对。FTIRE 由于发布在ADAMS11 0之中,因此引起更广泛的关注和讨论。它的主要特征是:
(1)弹性环不仅能描述轮胎的面内振动,也能描述轮胎的面外特性(侧偏特性)。胎体沿着圆周方向离散,需要时也可在胎体宽度方向离散;胎体单元之间用弹簧相连,在每个胎体单元上有一定数量的胎面单元;
(2)轮辋与轮胎用径、切、侧3个方向的分布弹簧相连。这样轮辋可以在面内平移和转动,也可在面外运动。环与轮辋之间采用了弹簧并联一个串联的弹簧阻尼单元的形式;
(3)轮胎的自由半径和弹簧的刚度随着轮胎转速的变化而改变;
(4)采用了复杂非线性的摩擦模型描述胎面橡胶的摩擦特性,即摩擦系数为压力和滑移速度的函数;
(5)可用于短波不平路面,频率可到120Hz;所用计算时间为实时的10~20倍;
(6)测取轮胎的模态参数时要求轮辋固定。FT IRE 在仿真轮胎平面内特性方面应当说具有较高的精度。但是该模型所需参数很多,获取这些参数需要做轮胎的模态试验以及不同压力和滑移速度下胎面橡胶的摩擦特性试验[31,32],其费用不会很低。在使用时,要求用户对该模型有相当的了解和正确测取参数。3 9 直接模态参数模型
该方法的基本思路是:轮胎的模态参数是其本征特性,通过试验手段可以获得自由-自由轮胎的模态参数,然后直接利用它对轮胎进行建模。将路面对轮胎的作用看成外界输入,适用于不同结构的轮胎(如子午胎和斜交胎)。在与车辆模型的综合时,轮辋放在轮胎模型中。具体的建模过程详见文献[33]~文献[38]。目前已成功建立了轮胎的稳态和动态纯侧偏模型,稳态滚动模型和静态包容特性模型。
环模型和直接模态参数模型是目前国际上解决
165 2004年(第26卷)第2期 汽 车 工 程
轮胎在不平路面动特性仿真的主要方法,下面将对它们进行比较。
环模型与直接模态模型是具有一定频带的动力学模型,都借助了试验模态分析技术。它们具有许多有限元模型的优点,但是自由度要少得多。环模型是将轮胎结构进一步物理化确定其参数的;对轮胎阻尼的设置难以与实际相符;在提取模型参数时只取了少数低阶模态参数做为提取参数的依据。而直接模态模型是直接取一定频带下(如几百赫兹)的所有模态,这样在参数的确定上可能更接近原系统,但相应的试验工作量和难度会增加。
在对轮胎进行模态试验以测取其模态参数时,环模型要求轮辋固定;而直接模态模型定义的是自由悬置下的轮胎模态参数。一般情况下对轮辋的约束主要影响轮辋振型系数不为零的低阶模态,即环模型主要依赖提取参数的模态。直接模态模型将轮胎本身固有特性与约束系统带来的影响分别处理,在与试验台或整车综合时可计入约束带来的影响。
在模型参数确定的前提下,环模型与直接模态模型的发展面临着的问题几乎是共同的。其中重要的难点是接触、计算效率以及模型的精确度问题。环模型由于起步早且研究的硬件设施(试验设备)好,故在实用化方面走在前面。其中SWIFT 模型更具有经验模型的特点,有其实用的一面,但亦有影响其更快发展的问题。直接模态模型体系应当说更具严谨的科学基础,有发展前景。但由于缺乏必要的试验研究条件,目前发展受到一定影响。
对环模型和直接模态模型来说,应用于平顺性和中频的NVH 模拟已不是很大的难题,因为它们着重于频域的统计结果。而对于耐久性的模拟还有待于更多的努力,以提高其模拟的精确性。3 10 有限元模型
有限元模型基于对轮胎结构的详细描述,使用时具有很高的精度。这类模型具有相当多的自由度,计算时间长且占用很大的计算资源。通常只用于轮胎设计而不用于车辆动力学研究。文献[39]对轮胎的有限元建模进行了全面深入的介绍。随着计算机硬件的发展,国外的汽车公司也展开了这方面的研究[40-43]
。文献[40]利用ABAQUS 建立了300自由度的有限元环模型,对轮胎的静态包容特性进行了深入研究。密歇根大学和Ford 汽车公司联合开发了三维的用于车辆耐久性仿真的简化有限元轮胎模型[41]。该模型使用ABAQU S 作为求解器,对于把有限元模型用于车辆动力学仿真提出了
新的思路。预先计算出给定胎压下作用在胎侧上的力和力矩并做成表格,从而避免了轮胎分析时计算胎侧响应,大大提高了计算效率。ETA 公司开发了三维VPG 轮胎模型[42,43],使用LS-DANA 作为求解器,但非常耗时,通常只在巨型机上运行。
目前有限元模型用于车辆动力学仿真还有困难:
(1)它对建模和使用者都有很高要求,若要通用必须做成标准的轮胎模型库;
(2)通常都实施在商业化的有限元软件包中,即没有自己的求解器;
(3)与多体的整车模型有效地进行耦合仿真。一个有限元轮胎模型的自由度要远远多于整车模型的自由度,在进行整车仿真时,一个整车模型至少有4个轮胎,依赖于积分方法,每一个积分步长要调用轮胎模型多次。
4 结论
(1)轮胎模型对车辆动力学仿真技术的发展及仿真计算结果有很大影响,开发和选用轮胎模型是至关重要的;环模型是目前发展比较成熟和得到商业化应用的轮胎模型,其中具有代表性的是SWIFT 模型和FT IRE 模型。SWIFT 模型计算效率高,可以满足硬件在环仿真的要求;FT IRE 模型则具有高的频率范围(到120Hz),可以用于三维不平路面:(2)直接模态参数模型由于其建模的科学化,规范化,且适应所有轮胎,建模发展卓有成效,有着很大的发展潜力;
(3)有限元轮胎模型基于对轮胎结构的详细描述,包括几何和材料特性,计算量大,在现阶段应用于不平路面的车辆动力学仿真还不现实,处于研究阶段;
(4)在开发不平路面的轮胎模型时,描述轮胎-路面接触的有效算法是关键,这也是所有模型遇到的共同问题;
(5)提高耐久性仿真的精度是当前轮胎模型发展的重要方向。
参考文献
1 Potts G R Application of Holography to the S tudy of Tire Vibra
ti ons Tire Science and T echnology,TS TCA,1973,1(3)
2 Potts G R T ire Vibration Studies:th e S tate of th e Art T ire S cience
and Technology,T STCA,1975,3(3)
166 汽 车 工 程 2004年(第26卷)第2期
3 Potts G R,Bell C A and Roy T K Tire Vi brations Tire S cience and
Technoloy,T STCA,1977,5(4)
4 Kung L E&Soedel W Natural Frequen cies and M ode Shapes of an
Automotive Tire w ith Interpretation and Classification Using3-D Computer Graphics Joumal of Sound and Vibration,1985,102(3)
5 管迪华,吴卫东 轮胎动特性试验模态分析 汽车工程,1995,(6)
6 Yam L H and Guan DH T hree-Di m ensional M ode Shapes of a T ire
Usi ng Experi m ental M odal Analysis Experimental M echanics, 2000,40(4)
7 Scavuzzo R W,Richards T R Tire Vibration M odes and Effects on
Vehicle Ride Quality T ire Scien ce and T echnology,T STCA,1993, 21(1)
8 Bandel P Simulati on M odel of the Dynamic Behavior of a Tire Run
ning Over an Obstacle Tire S cience and T echnology,TST CA,1988, 16(2)
9 Zegelaar P W A The Dynamic Response of T yres to Brake T orque
Variati ons and Road U nevenness:[Dissertation].Delft Univ of Technology,the Netherlands,1998
10 Killner J R Pneumatic T ire M odel for Aircraft Simulation Joumal
of Aircraft,1982,19(10)
11 Captain K M Analytical T ire M odels for Dynamic Vehicle Simula
tion Vehicle S ystem Dynamics,1979,8
12 Guo K T ire Roller Contact M odels for Simul ation of Veh icle Vibra
tion Input SAE paper932008
13 Guo K and Liu Qing A M odel of T ire Enveloping Properties an d i ts
Applicati on on M odeling of Automotive Vibration System SAE pa per980253
14 Badalamenti J M,and Doyle J G R Radi al-Interradial S pring T ire
M odels Joumal of Vibration,Acoustics,Stress and Reliability in De sign,1988,110(1)
15 Davis Denny C A Radial Spring Terrain Enveloping Tire M od
el Veh i cle S ystem Dynamics,1974,13
16 ADAM S/Tire User s Gui de,Versi on5 2 1 1989,M echanical Dy
namics
17 Gough V E Tyres and Air Suspension,Advances in Automobile
Engineeri ng Editor G H Tidbury Pergamon Press,Oxford,U K , 1963
18 Lippman S A,Piccin W A&Baker T P Enveloping Characteri stic
of Truck Tires-a Laboratory Evaluati on SAE paper650184
19 Gong S A Study of In-Pl ane Dynamics of T ires PhD disserta
tion,Delft university of Technology,T he Netherlands,1993
20 危银涛,管迪华 等 关于轮胎的圈模型 汽车工程,2001,(4)
21 Clark S K The Rolling T i re Under Load SAE650493
22 Tielking J T Plane Vibration Characteristics of a Pneumatic T ire
M odel SAE Paper650492
23 Bohm F M echanik des Gurtelreifens Ingenicar Archiv 1966,35
24 Pacejka H B Tire in plane dynamics In Clark S K Editor,M e
chanics of Pneumatic Tires W ashington D C:National Bureau of Stands M onograph122,197125 Padovan J On Viscoelasticity and Standing Waves in Tire T ire Sci
ence and Technology,1976,4(4)
26 Kung L E,S oedel W,Yang T Y On the Dynamic Response at the
Wheel Axle of a Pneumatic T ire Journal of Sound and Vibration, 1986,107(2)
27 Huang S C,S oedel W Effects of Coriolis Acceleration on the Free
and Forced in plane Vibrations of Rotati ng Rings on Elastic Foun dation Journal of Sound and Vibration,1987,115(2)
28 Huang S C,Chen Kai Su In Plane Dynamics of Tires on the Road
Based on an Experimentally Verified Rol ling Ring M odel Vehicle System Dynamics,1992,21
29 M aurice J P Short Wavelength an d Dynamic Tyre Behavior under
Lateral and Combined Sli p Conditions:[Di ssertation].Delft U niv of Technology,T he Netherlands,2000
30 M ichael Gipser FT IRE,a New Fast Tire M odel for Ride Comfort
Simulations 1999ADAM S Users Conference,Berlin
31 ADAM S/T ire User s Gui de,Version11 0 2001,M echanical Dy
namics
32 ADAM S/T ire User s Gui de,Version12 0 2002,M echanical Dy
namics
33 Guan Dihua,W u Weidong&Zhang Aiqi an Tire M odeling for Ver
tical Properties by Using Experimental M odal Parameters SAE pa per980252
34 Guan Dihua,Zhang Aiqian&Yam LH M odeling of T ire Rolling
Properties by Using Ex peri m ental M odal Parameters SAE paper 2000-01-0361
35 Guan DH,Jin Shang&Yam LH Establishment of M odel for Tire
Steady State Comering Properties using Experimental M odal Pa rameters Vehicle System Dynamics,2000,34(1)
36 Shang jin,Guan Dihua and Yam L H Study on T ire Dynam i c Cor
nering Properties Using Experimental M odal Parameters Vehicle System Dynamics,2002,37(2)
37 Guan Dihua,Fan Chengji an&Wei Yintao An Initi al Study on Tire
M odeli ng for Enveloping Properties by Usi ng Experi m ental M odal Parameters International Pacefic Conferencel1th,Shanghai,2001 38 Guan Dihua&Fan Chengjian Tire M odeling for Vertical Proper
ties including Enveloping Properties Using Experimental M odal Pa rameters Vehicle System Dynamics,2003,40(6)
39 Computational M odeling of T ires NASA-CP-3306,Complied by
A K Noor and J A T anner,1995
40 M ousseau C W&Clark An Analytical and Experimental Study of
a Tire Rolli ng Over a S tepped Obstacle at Low Velocity Tire Sci
ence and Technology,T STCA,1994,22(3)
41 Darnel l Ian,H ulbert M&M ousseau C W An Efficient T hree-
Dimensional Tire M odel for Vehicle Dynamics Simulations M ech Struct &M ACH ,1997,25(1)
42 Hallquist J O,Zhang Y&Farahani A,et al Validation of a FEA
Tire M odel for Vehicle Dynam ics Analysis and Full Vehicle Virtual Proving Ground Appli cati ons SAE paper971100
43 Zhang,et al Vehicle Chassis/Suspension Dynamics Analysis-Fi
ni te Element model Vs Rigid Body M odel SAE paper980900
167
2004年(第26卷)第2期 汽 车 工 程
面向汽车动力学控制的汽车仿真软件开发
面向汽车动力学控制的汽车仿真软件开发1 李幼德,刘巍, 李静 吉林大学汽车工程学院 (130022) E-mail :aweii_liu@https://www.360docs.net/doc/f219085657.html, 摘 要:汽车动力学仿真软件对汽车电控系统的开发具有重要意义。本文利用Matlab/Simulink 软件编制适用于汽车电控制系统开发的汽车动力学模型,并编制了图形用户界面,并针对样车进行了不同工况的模拟。 关键词:汽车动力学,图形用户界面,仿真 1.引言 随着汽车电子控制系统的发展,特别是汽车电控制系统开发手段的发展,以Matlab/Simulink 和Dspace 为开发平台的V 流程的电控系统开发方法已被越来越多的开发商所采用。在汽车电控制系统的开发中,例如汽车牵引力控制系统(TCS )、汽车制动防抱死控制系统(ABS )和汽车稳定性控制系统(ESP )等,为了研究汽车各控制系统的控制算法,汽车动力学仿真模型是必不可少的。而传统的汽车动力学仿真模型(如Adams 和Simpack 等),由于仿真的实时性较差,并不能够满足汽车电控制系统开发的要求。因此,开发基于Matlab/Simulink 平台的汽车动力学仿真软件对于汽车电控系统具有重要的使用价值。 2.汽车动力学模型 考虑汽车动力学模型运行实时性的要求,汽车动力学模型需要进行适当的简化。因此,忽略汽车的侧倾和俯仰运动,以及悬架的影响,但是考虑了汽车载荷的转移。在汽车动力学模型中,包括:发动机模型、传动系模型、轮胎模型、车轮模型以及整车模型等。 2.1发动机模型 发动机模型的输入包括:油门开度、反馈的发动机转速。整个的发动机将简化为一个一阶惯性环节系统[1]。 1 2 1sT e e T e M sT ?= + (1) 其中:e M 发动机的动态输出力矩;为发动机的静态输出力矩,为系统时间常数,为系统滞后时间常数而拉氏变换变量。 e T 2T 1T s 2.2制动器模型 制动器模型采用的是盘式制动器模型,公式如下: b w T A n s P b μη=????? (2) 1 本课题得到高等学校博士学科点专项科研基金(项目编号:20020183025)资助 - 1 -
车辆系统动力学解析
汽车系统动力学的发展现状 仲鲁泉 2014020326 摘要:汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有汽车在垂直和横向两个方面的动力学内容。介绍车辆动力学建模的基础理论、轮胎力学及汽车空气动力学基础之外,重点介绍了受汽车发动机、传动系统、制动系统影响的驱动动力学和制动动力学,以及行驶动力学和操纵动力学内容。本文主要讲述的是通过对轮胎和悬架的系统动力学研究,来探究汽车系统动力学的发展现状。 关键词:轮胎;悬架;系统动力学;现状 0 前言 汽车系统动力学是讨论动态系统的数学模型和响应的学科。它是把汽车看做一个动态系统,对其进行研究,讨论数学模型和响应。是研究汽车的力与其汽车运动之间的相互关系,找出汽车的主要性能的内在联系,提出汽车设计参数选取的原则和依据。 车辆动力学是近代发展起来的一门新兴学科。有关车辆行驶振动分析的理论研究,最早可以追溯到100年前。事实上,知道20世纪20年代,人们对车辆行驶中的振动问题才开始有初步的了解;到20世纪30年代,英国的Lanchester、美国的Olley、法国的Broulhiet开始了车辆独立悬架的研究,并对转向运动学和悬架运动学对车辆性能的影响进行了分析。开始出现有关转向、稳定性、悬架方面的文章。同时,人们对轮胎侧向动力学的重要性也开始有所认识。在过去的70多年中,车辆动力学在理论和实际应用方面也都取得了很多成就。在新车型的设计开发中,汽车制造商不仅依靠功能强大的计算机软件,更重要的是具有丰富测试经验和高超主观评价技能的工程师队伍。 在随后的20年中,车辆动力学的进展甚微。进入20世纪50年代,可谓进入了一个车辆操纵动力学发展的“黄金时期”。这期间建立了较为完整的车辆操纵动力学线性域(即侧向加速度约小于0.3g)理论体系。随后有关行驶动力学的进一步发展,是在完善的测量和计算手段出现后才得以实现。人们对车辆动力学理解的进程中,理论和试验两方面因素均发挥了作用。随后的几十年,汽车制造商意识到行驶平顺性和操纵稳定性在汽车产品竞争中的重要作用,因而车辆动力学得以迅速发展。计算机及应用软件的开发,使建模的复杂程度不断提高。
铁道车辆系统动力学作业及试地的题目详解
作业题 1、车辆动力学的具体内容是研究车辆及其主要零部件在各种运用情况下,特别是在高速运行时的位移、加速度和由此而产生的动作用力。 2、车辆系统动力学目的在于解决下列主要问题: ①确定车辆在线路上安全运行的条件; ②研究车辆悬挂装置和牵引缓冲装置的结构、参数和性能对振动及 动载荷传递的影响,并为这些装置提供设计依据,以保证车辆高速、安全和平稳地运行; ③确定动载荷的特征,为计算车辆动作用力提供依据。 3、铁路车辆在线路上运行时,构成一个极其复杂的具有多自由度的振动系统。 4、动力学性能归根结底都是车辆运行过程中的振动性能。 5、线路不平顺不是一个确定量,它因时因地而有不同值,它的变化规律是随机的,具有统计规律,因而称为随机不平顺。 (1)水平不平顺; (2)轨距不平顺; (3)高低不平顺; (4)方向不平顺。 6、车轮半径越大、踏面斜度越小,蛇行运动的波长越长,即蛇行运动越平缓。 7、自由振动的振幅,振幅大小取决于车辆振动的初始条件:初始位移和初始速度(振动频率)。
8、转向架设计中,往往把车辆悬挂的静挠度大小作为一项重要技术指标。 9、具有变摩擦减振器的车辆,当振动停止时车体的停止位置不是一个点,而是一个停滞区。 10、在无阻尼的情况下共振时振幅随着时间增加,共振时间越长,车辆的振幅也越来越大,一直到弹簧全压缩和产生刚性冲击。 11、出现共振时的车辆运行速度称为共振临界速度 12、在车辆设计时一定要尽可能避免激振频率与自振频率接近,避免出现共振。 13、弹簧簧条之间要留较大的间距以避免在振动过程中簧条接触而出现刚性冲击 14、两线完全重叠时,摩擦阻力功与激振力功在任何振幅条件下均相等。 15、在机车车辆动力学研究中,把车体、转向架构架(侧架)、轮对等基本部件近似地视为刚性体,只有在研究车辆各部件的结构弹性振动时,才把他们视为弹性体。 16、簧上质量:车辆支持在弹性元件上的零部件,车体(包括载重)及摇枕质量 17、簧下质量:车辆中与钢轨直接刚性接触的质量,如轮对、轴箱装置和侧架,客车转向架构架,一般是簧上质量。 18、一般车辆(结构对称)的垂向振动与横向振动之间是弱耦合,因此车辆的垂向和横向两类振动可以分别研究。 19、若车体质心处于纵垂对称面上,但不处于车体的横垂对称面上,则车体的浮沉振动将和车体的点头振动耦合起来。
车辆系统动力学仿真大作业(带程序)
Assignment Vehicle system dynamics simulation 学院:机电学院 专业:机械工程及自动化 姓名: 指导教师:
The model we are going to analys: The FBD of the suspension system is shown as follow:
According to the New's second Law, we can get the equation: 2 )()(221211mg z z c z z k z m --+-=???? 221212)()(z k mg z z c z z k z m w +-----=? ??? 0)()()()(222111222111=-++--+-++--+? ? ? ? ? ? ? ?w w w w z L z k z L z k z L z c z L z c z m χχχχ 0)()()()(2222111122221111=-++----++---? ? ? ? ? ? ? ?w w w w z L z L k z L z L k z L z L c z L z L c J χχχχχ d w w w w Q z L z k z L z c z m ,111111111)()(-=------? ? ? ? ?χχ d w w w w Q z L z k z L z c z m ,222222222)()(-=-+--+-? ????χχ When there is no excitation we can get the equation: 2)()(221211mg z z c z z k z m --+-=???? 2 21212)()(z k mg z z c z z k z m w +-----=? ??? Then we substitude the data into the equation, we write a procedure to simulate the system: Date: ???? ?? ??? ??==?==?===MN/m 0.10k m 25.1s/m kN 0.20MN/m 0.1m kg 3020kg 2100kg 3250w 2l c k I m m by w b
车辆系统动力学发展1
汽车系统动力学的发展和现状 摘要:近年来,随着汽车工业的飞速发展,人们对汽车的舒适性、可靠性以及安全性也提出越来越高的要求,这些要求的实现都与汽车系统动力学相关。汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有车辆在垂向和横向两个方面的动力学内容。本文通过对汽车系统动力学的的介绍,对这一新兴学科的发展和现状做一阐述。 关键字:汽车系统动力学动力学响应发展历史 Summary:In recent years, with the rapid development of automobile industry, people on the vehicle comfort, reliability and safety are also put forward higher requirements, to achieve these requirements are related to vehicle system dynamics.Vehicle system dynamics is the study of all related to the movement of the car system discipline, it involves the scope is broad, in addition to the effects of dynamic response of vehicle longitudinal motion and its subsystems, and vehicles to and dynamic content crosswise two aspects in the vertical.Based on the vehicle system dynamics is introduced, the development and status of this emerging discipline to do elaborate. Keywords:Dynamics of vehicle system dynamics Dynamic response Development history 0 引言 车辆动力学是近代发展起来的一门新兴学科。有关车辆行驶振动分析的理论研究,最早可以追溯到100年前。事实上,知道20世纪20年代,人们对车辆行驶中的振动问题才开始有初步的了解;到20世纪30年代,英国的Lanchester、美国的Olley、法国的Broulhiet开始了车辆独立悬架的研究,并对转向运动学和悬架运动学对车辆性能的影响进行了分析。开始出现有关转向、稳定性、悬架方面的文章。同时,人们对轮胎侧向动力学的重要性也开始有所认识。 在随后的20年中,车辆动力学的进展甚微。进入20世纪50年代,可谓进入了一个车辆操纵动力学发展的“黄金时期”。这期间建立了较为完整的车辆操纵动力学线性域(即侧向加速度约小于0.3g)理论体系。随后有关行驶动力学的进一步发展,是在完善的测量和计算手段出现后才得以实现。人们对车辆动力学理解的进程中,理论和试验两方面因素均发挥了作用。随后的几十年,汽车制造商意识到行驶平顺性和操纵稳定性在汽车产品竞争中的重要作用,因而车辆动力学得以迅速发展。计算机及应用软件的开发,使建模的复杂程度不断提高。在过去的70多年中,车辆动力学在理论和实际应用方面也都取得了很多成就。在新车型的设计开发中,汽车制造商不仅依靠功能强大的计算机软件,更重要的是具有丰富测试经验和高超主观评价技能的工程师队伍。 传统的车辆动力学研究都是针对被动元件的设计而言,而采用主动控制来改变车辆动态性能的理念,则为车辆动力学开辟了一个崭新的研究领域。在车辆系统动力学研究中,采用“人—车—路”大闭环的概念应该是未来的发展趋势。作为驾驶者,人既起着控
车辆动力学相关的软件及特点
SIMPACK车辆动力学习仿真系统 SIMPACK软件是德国INTEC Gmbh公司(于2009年正式更名为SIMPACK AG)开发的针对机械/机电系统运动学/动力学仿真分析的多体动力学分析软件包。它以多体系统计算动力学(Computational Dynamics of Multibody Systems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件。SIMPACK软件的主要应用领域包括:汽车工业、铁路、航空/航天、国防工业、船舶、通用机械、发动机、生物运动与仿生等。 SIMPACK是机械系统运动学/动力学仿真分析软件。SIMPACK软件可以分析如:系统振动特性、受力、加速度,描述并预测复杂多体系统的运动学/动力学性能等。 SIMPACK的基本原理就是通过搭建CAD风格的模型(包括铰、力元素等)来建立机械系统的动力学方程,并通过先进的解算器来获取系统的动力学响应。 SIMPACK软件可以用来仿真任何虚拟的机械/机电系统,从仅仅只有几个自由度的简单系统到诸如一个庞大的火车。SIMPACK软件可以应用在我们产品设计、研发或优化的任何阶段。 SIMPACK软件独具有的全代码输出功能可以将我们的模型输出成Fortran或C代码,从而可以实现与任意仿真软件的联合。 车辆动力学仿真carsim CarSim是专门针对车辆动力学的仿真软件,CarSim模型在计算机上运行的速度比实时快3-6倍,可以仿真车辆对驾驶员,路面及空气动力学输入的响应,主要用来预测和仿真汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性,同时被广泛地应用于现代汽车控制系统的开发。CarSim可以方便灵活的定义试验环境和试验过程,详细的定义整车各系统的特性参数和特性文件。 CarSim软件的主要功能如下: 适用于以下车型的建模仿真:轿车、轻型货车、轻型多用途运输车及SUV; 可分析车辆的动力性、燃油经济性、操纵稳定性、制动性及平顺性; 可以通过软件如MATLAB,Excel等进行绘图和分析; 可以图形曲线及三维动画形式观察仿真的结果;包括图形化数据管理界面,车辆模型求解器,绘图工具,三维动画回放工具,功率谱分析模块;程序稳定可靠; CarSim软件可以扩展为CarSim RT, CarSim RT 是实时车辆模型,提供与一些硬件实时系统的接口,可联合进行HIL仿真;
车辆动力学仿真
车辆动力学仿真 课程编码:202060 课程英文译名:Dynamics Simulation of Vehicle System 课程类别:专业课 开课对象:车辆工程专业开课学期:第7学期 学分:2.5学分;总学时: 40学时;理论课学时:32学时;上机学时: 8学时 先修课程:理论力学、材料力学、机械原理、机械设计、机械振动 教材:车辆动力学模拟及其方法,威鲁麦特(德),北京理工大学出版社, 1998.5 ,第1版 参考书:【1】汽车系统动力学,张洪欣,同济大学出版社, 1996 ,第1版【2】汽车系统动力学及仿真,雷雨成,国防工业出版社, 1997 ,第1版一、课程的性质、目的和任务 《车辆系统动力学仿真》是车辆工程专业理论性较强的专业课。本课程的目的是,使学生初步学会汽车动力学分析方法,能够解决工程实际问题,以便增强其研究和解决车辆动力学问题的能力。本课程的任务,是以数学力学模型为基础,结合虚拟样机仿真技术,讲授汽车的垂直动力学、横向动力学、纵向动力学,为继续学习和掌握汽车新科技创造条件。 二、课程的基本要求 对汽车动力学有一定的了解,掌握有关的基本概念、基本理论和基本方法及其应用,掌握汽车多体动力学仿真的方法。具体要求为: 1.对汽车动力学仿真的基本概念和基本分析方法有明确的认识; 2.掌握单自由度系统的振动系统,自由振动、强迫振动的微分方程的建立方法; 3.掌握多自由度系统的振动系统的微分方程,初步掌握多自由度系统振动的模态分析方法; 4.了解随机振动的一些基本概念,掌握路面不平度功率谱密度的概念及其计算方法; 5.掌握汽车垂直动力学模型的建立方法,以及路面激励对汽车振动的影响; 6.掌握汽车弹簧、减震器、橡胶金属部件、轮胎等部件垂向动力学的特性; 7.掌握汽车纵向动力学微分方程,掌握滚动阻力、爬坡阻力、加速阻力的计算方法; 8.掌握驱动附着率、制动附着率对行驶极限的影响; 9.掌握汽车横向动力学的微分方程建立方法,及其横向动力学微分方程的特性; 10.掌握汽车操作稳定性的概念及其影响汽车操作稳定性的因素; 11.掌握轮胎的真实特性,初步掌握轮胎动力学的初步概念。
交通问题基于vissim仿真研究现状
1.3.1国外交通仿真技术的研究现状 交通系统仿真技术是随着电子计算机和系统仿真技术的发展而发展起来的。在国外大体上经历了三个发展阶段tl3〕。 第一阶段,20世纪40年代末至60年代初,为诞生期。该时期的工作大多讨论的是如何进行交通流仿真,直到大约1%O年,用仿真技术研究交通流状态的可能性和可行性才得到普遍承认,并且开始开发一些交通系统仿真软件。 第二阶段,20世纪60年代初至80年代初,为发展期。该时期,发表了大量的论文和专著,主要都是关于交通流仿真方法及其模型建立的内容。与此同时,大量的交通系统仿真应用软件被开发出来,这些软件可以分为两种类型,一类以宏观交通仿真模型为基础,另一类则以微观交通仿真模型为基础。 第三阶段,20世纪80年代初至现在,为成熟期。这一时期,交通系统仿真技术在美国已经得到了迅速的发展和广泛的应用。本阶段,交通系统仿真技术的发展呈现如下特征: ①系统建模开始突破微观模型与宏观模型,出现了混合模型。一个典型的例子是由schwerdtfeger于1984年提出的DYNEMO仿真模型,采用交通流的一般关系式来描述车流运动,而将每辆车看作是一个基本单元。另外,、乞nAerde于20世纪80年代中期开发的INTEGRATION,混合使用了微观和宏观交通流模型,被认为是准微观模型。 ②仿真软件开始向大型化、综合性方向发展。例如,由Hubschnelder
从1983年开始研制的MlsSION软件,既可用于高速公路,又可用于城市道路;既可用于一般的交通流仿真,又可用于公共交通系统的仿真试验。再如,由英国M琳公司开发的T班PS和美国caliper公司推出的肠anscAD软件包,都是以四阶段模型为基础,用于区域交通规划。值得一提的还有,由英国Quadstone公司从1992年开发奴它ARAMIcs,能够持100万个结点,,_400万个路段,32000个区域的路网。除此之外,这一时期还研制出用于信号交叉口的CALSIG(1988年)、CAPSSI(1986年)、POSIT(1985年)、SIDRA2.2(1986年)、sIGNA 乓55(1986年)、soAP一84(1984年),用于高速公路的CoRQ以及用于乡村道路的TWOPAS等。 ③研究重点从软件开发逐渐转向了系统模型的改进,包括模型的精炼,如加入优化子模型和加入有效性测定、仿真模型集成、向个人计算机移植等等。于是,己开发出的软件不断推出新的版本,比如,到1983年,sIGOP己上升为SIGOP一111;到1987年,TRANSYT已经上升为TRANSYT7F;到1985年,FREQ已上升为FREQSPE,TRARR 己提出了第三版等等。 中国智能交通网https://www.360docs.net/doc/f219085657.html, 国内外交通仿真技术的研究现状https://www.360docs.net/doc/f219085657.html,/tech/show-8818.html ④新的计算机技术开始用于交通系统仿真,主要表现为仿真界面更加友好,人机交流更加方便。另外,计算机图形技术的应用使得仿真过
国内外交通仿真技术的研究现状
国内外交通仿真技术的研究现状 仿真,顾名思义是指对真实事物的模仿,也称为“模拟”,它是指为了求解问题而人为地模拟真实系统的部分或整个运行过程。由于科学研究与实践的对象是兼有方法论与工具意义的系统仿真问题,因此,我们讲的仿真一般也就是指系统仿真。雷诺(T.H.Nayfor)在其专著中定义:仿真是在数字计算机上进行实验的数学化技术,它包括数字与逻辑模型的某些模式,这些模型描述某一事件或系统(或者它们的某些部分)在若干周期内的特征。 国内学者认为:系统仿真就是在计算机或实体上建立系统的有效模型(数字的、物理的、数字一物理效应混合的模型),并在模型上进行系统试验。 目前人们普遍接受的观点是:系统仿真是以相似原理、控制理论、系统技术、信息技术及其应用领域有关专业技术为基础,以计算机和各种专用物理效应设备为工具,利用系统模型对真实的或设想的系统进行动态研究的一门多学科综合技术。 系统仿真是20世纪50年代逐步形成并迅速发展起来的新兴学科。最早的通用仿真器是由美国IBM公司研制的,1%7年更名为通用仿真系统,并增加了许多功能,直至后来发展成应用最广的一种离散系统仿真语言。时至今日,仿真技术发展方兴未艾。我国自20世纪50年代就开展了仿真技术研究,并得到了迅速发展。60年代末,在开展连续系统仿真的同时,已开始对离散事件系统(如交通管理、
企业管理)进行仿真研究。 70一80年代,在训练仿真器方面获得飞速发展,自行研制的飞行仿真器、舰艇仿真器、火电机组培训仿真系统、化工过程培训仿真系统、汽车模拟驾驶仿真器相继研制成功并投入使用,在行业操作人员培训中发挥了很大的作用。1989年中国系统仿真学会正式立,标志着仿真学在中国的发展进入了一个崭新的阶段。90年代,我国开始对分布交互式仿真、虚拟现实仿真等先进仿真技术及其应用进行研究,开展了较大规模的复杂系统仿真[‘2一。 系统仿真近些年来发展十分迅速,它综合集成了计算机、网络、图形图像、多媒体、软件工程、信息处理、自动控制等多个高科技领域的知识。现代仿真系统已经成为任何复杂的系统特别是高新技术产业不可缺少的研究、设计、评价和训练的手段和工具,并在实践中得到了有效的应用。 1.3.1国外交通仿真技术的研究现状 交通系统仿真技术是随着电子计算机和系统仿真技术的发展而发展起来的。在国外大体上经历了三个发展阶段tl3〕。 第一阶段,20世纪40年代末至60年代初,为诞生期。该时期的工作大多讨论的是如何进行交通流仿真,直到大约1%O年,用仿真技术研究交通流状态的可能性和可行性才得到普遍承认,并且开始开发一些交通系统仿真软件。 第二阶段,20世纪60年代初至80年代初,为发展期。该时期,发表了大量的论文和专著,主要都是关于交通流仿真方法及其模型建立
车辆系统动力学-复习提纲
1. 简要给出完整约束与非完整约束的概念2-23,24,25, 1)、约束与约束方程 一般的力学系统在运动时都会受到某些几何或运动学特性的限制,这些构成限制条件的具体物体称为约束,用数学方程所表示的约束关系称为约束方程。 2)、完整约束与非完整约束 如果约束方程只是系统位形及时间的解析方程,则这种约束称为完整约束。 完整约束方程的一般形式为: 式中,qi为描述系统位形的广义坐标(i=1,2,…,n);n为广义坐标个数;m为完整约束方程个数;t为时间。 如果约束方程是不可积分的微分方程,这种约束就称为非完整约束。 一阶非完整约束方程的一般形式为:
式中,qi为描述系统位形的广义坐(i = 1, 2, …,n);为广义坐标对时间的一阶与数;n为广义坐标个数;m为系统中非完整约束方程个数;t为时间。 2. 解释滑动率的概念3-7,8 1.滑动率S 车轮滑动率表示车轮相对于纯滚动(或纯滑动)状态的偏离程度,是影响轮胎产生纵向力的一个重要因素。 为了使其总为正值,可将驱动和被驱动两种情况分开考虑。驱动工况时称为滑转率;被驱动(包括制动,常以下标b以示区别)时称为滑移率,二者统称为车轮的滑动率。
参照图3-2,若车轮的滚动半径为rd,轮心前进速度(等于车辆行驶速度)为uw,车轮角速度为ω,则车轮滑动率s定义如下: 车轮的滑动率数值在0~1之间变化。当车轮作纯滚动时,即uw=rd ω,此时s=0;当被驱动轮处于纯滑动状态时,s=1。 3. 轮胎模型中表达的输入量和输出量有哪些?3-22,23 轮胎模型描述了轮胎六分力与车轮运动参数之间的数学关系,即轮胎在特定工作条件下的输入和输出之间的关系,如图3-7所示。 根据车辆动力学研究内容的不同,轮胎模型可分为:
铁道车辆平稳性分析
铁道车辆平稳性分析 1.车辆平稳性评价指标 1.1 sperling平稳性指标 欧洲铁路联盟以及前社会主义国家铁路合作组织均采用平稳性指数来评定车辆的运行品质。等人在大量单一频率振动的实验基础上提出影响车辆平稳性的两个重要因素。其中一个重要因素是位移对时间的三次导数,亦即(加速度变化率)。若上式两边均乘以车体质 量,并将之积改写为,则。由此可见,在一定意义上代表力F的变化率的增减变化引起冲动的感觉。 如果车体的简谐振动为,则,其幅值为: 影响平稳性指数的另一个因素是振动时的动能大小,车体振动时的最大动能为: 所以: sperling在确定平稳性指数时,把反映冲动的和反映振动动能的乘积作为衡量标准来评定车辆运行平稳性。 车辆运行平稳性指数的经验公式为: 式中——振幅(cm); f——振动频率(Hz); a——加速度,其值为:; ——与振动频率有关的加权系数。 对于垂向振动和横向振动是不同的,具体情况见错误!未找到引用源。。 表1振动频率与加权系数关系 对于垂向振动的加权系数对于横向振动的加权系 f的取值范围(Hz)公式f的取值范围(Hz)公式 0.5~5.9 0.5~5.5
5.9~20 5.4~2.6 大于20 1 大于26 1 以上的平稳性指数只适用一种频率一个振幅的单一振动,但实际上车辆在线路上运行时的振动是随机的,即振动频率和振幅都是随时间变化的。因此在整理车辆平稳性指数时,通常把实测的车辆振动加速度按频率分解,进行频谱分析,求出每段频率范围的振幅值,然后对每一频段计算各自的平稳性指数,然后再求出全部频率段总的平稳性指数: Sperling平稳性指标等级一般分为5级,sperling乘坐舒适度指标一般分为4级。但在两级之间可按要求进一步细化。根据W值来评定平稳性等级表见错误!未找到引用源。 表2车辆运行平稳性及舒适度指标与等级 W值运行品质W值乘坐舒适度(对振动的感觉) 1 很好 1 刚能感觉 2 好 2 明显感觉 3 满意 2.5 更明显但无不快 4 可以运行 3 强烈,不正常,但还能忍受3.25 很不正常 4.5 运行不合格 3.5 极不正常,可厌,烦恼,不能长时忍 受 5 危险 4 极可厌,长时忍受有害 我国也主要用平稳性指标来评定车辆运行性能,但对等级做了简化,见错误!未找到引用源。。 表3车辆运行平稳性指标与等级 平稳性等级评定 平稳性指标 客车机车货车 1 优<2.5 <2.75 <3.5 2 良好 2.5~2.75 2.75~3.10 3.5~4.0 3 合格 2.75~3.0 3.10~3.45 4.0~4.25 对sperling评价方法的分析: 1.该评价方法仅按照某一个方向的平稳性指标等级来判断车辆的性能是不全面的,需要同时考虑垂向与横向振动对人体的生理及心理的相互影响,因为有时根据垂向振动确定的平稳性指标等级与根据横向振动确定的平稳性指标等级存在较大的差异。 2.该评价方法不够灵敏。由于人体对不同振动频率的反应不同,当对应某一频率范围的平稳性指标值很大值大于,在该窄带中的振动已超出了人体能够承受的限度,但在其它频带中值都很小,由于该方向总的平稳性指标是不同振动频率的平稳性指标求和,因而可能该方向总的砰值并不大,从而认为该车辆的平稳性能符合要求是不正确的。
车辆系统动力学试题及答案
西南交通大学研究生2009-2010学年第( 2 )学期考试试卷 课程代码 M01206 课程名称 车辆系统动力学 考试时间 120 分钟 阅卷教师签字: 答题时注意:各题注明题号,写在答题纸上(包括填空题) 一. 填空题(每空2分,共40分) 1.Sperling 以 频率与幅值的函数 ,而ISO 以 频率与加速度的函数 评定车辆的平稳性指标。 2.在轮轨间_蠕滑力的_作用下,车辆运行到某一临界速度时会产生失稳的_自激振动_即蛇行运动。 3.车辆运行时,在转向架个别车轮严重减重情况下可能导致车辆 脱轨 ,而车辆一侧全部车轮严重 减重情况下可能导致车辆 倾覆 。 4.在车体的六个自由度中,横向运动是指车体的横移、 侧滚 和 摇头 。 5.在卡尔克线性蠕滑理论中,横向蠕滑力与 横向 蠕滑率和 自旋 蠕滑率呈相关。 6.设具有锥形踏面的轮对的轮重为W ,近似计算轮对重力刚度还需要轮对的 接触角λ 和 名义滚动圆距离之半b 两个参数。 7.转向架轮对与构架之间的 横向定位刚度 和 纵向定位刚度 两个参数对车辆蛇行运动稳定性影 响较大。 8. 纯滚线距圆曲线中心线的距离与车轮 的_曲率_成反比、与曲线的_曲率_成正比。 9.径向转向架克服了一般转向架 抗蛇行运动 和 曲线通过 对转向架参数要求的矛盾。 10.如果两辆同型车以某一相对速度冲击时其最大纵向力为F ,则一辆该型车以相同速度与装有相同缓冲器 的止冲墩冲击时的最大纵向力为_21/2F _,与不装缓冲器的止冲墩冲击时的最大纵向力为_2F_。 院 系 学 号 姓 名 密封装订线 密封装订线 密封装订线
共2页 第1页 5.什么是稳定的极限环? 极限环附近的内部和外部都收敛于该极限环,则称该极限环为稳定的极限环。 6.轨道不平顺有几种?各自对车辆的哪些振动起主要作用? 方向、轨距、高低(垂向)、水平不平顺。方向不平顺引起车辆的侧滚和左右摇摆。轨距不平顺对轮轨磨耗、车辆运行稳定性和安全性有一定影响。高低不平顺引起车辆的垂向振动。水平不平顺则引起车辆的横向滚摆耦合振动。 三.问答题 (每题15分,共30分) 1.已知:轮轨接触点处车轮滚动圆半径r ,踏面曲率半径R w ,轨面曲率半径R t , 法向载荷N ,轮轨材料的弹性模量E 和泊松比o 。试写出Hertz 理论求解接触椭圆 长短半径a 、b 的步骤。P43-P44 根据车轮滚动圆半径、踏面在接触点处的曲率半径、钢轨在接触点处的曲率半径得到A+B 、B-A ,算得cos β,查表得到系数m 、n ,然后分别根据钢轨和车轮的弹性模量E 和泊松比σ,求得接触常数k ,得出轮轨法向力N ,然后带人公式求得a 、b 。 2. 在车辆曲线通过研究中,有方程式 ()W f r y f w O W μψλ212 1 2 222 * 11=??? ?????+???? ?? 二.简答题 (每题5分,共30分) 1.与传统机械动力学相比,轨道车辆动力学有何特点? 2.轮轨接触几何关系的计算有哪两种方法,各有何优缺点? 解析和数值方法。数值方法可以用计算机,算法简单,效率高,但存在一定误差;解析方法是利用轮轨接触几何关系建立解析几何的方式求解,比较准确,但是计算繁琐,方法难于理解。 3.在车辆系统中,“非线性”主要指哪几种关系? 轮轨接触几何非线性、轮轨蠕滑关系非线性、车辆悬挂系统非线性 4.怎样根据特征方程的特征根以判定车辆蛇行运动稳定性?。 根据求出的特征根实部的正负判断车辆蛇行运动的稳定性,当所有的特征根实部均为负时,车辆系统蛇行运动稳定,存在特征根为零或者负时,车辆系统的蛇行运动不稳定。
交通仿真原理及交通仿真模型建立方法
交通仿真原理及交通仿真模型建立方法 摘要:交通仿真是计算机仿真技术在交通工程领域的一个重要应用,可以清晰的辅助分析预测交通堵塞的地段和原因,对城市规划、交通工程、和交通管理的有关方案进行比较和评价。本文在当今社会的背景下,回顾国内外交通仿真技术的发展历程,并简要分析了交通仿真技术的主要特点,然后通过交通仿真模型的建立,更加深入了解交通仿真技术。 关键词:交通仿真交通仿真模型 交通仿真:是研究复杂交通问题的重要工具,尤其是当一个系统过于复杂,无法用简单抽象的数学模型描述时,交通仿真的作用就更为突出。可以清晰的辅助分析预测交通堵塞的地段和原因,对城市规划、交通工程、和交通管理的有关方案进行比较和评价,在问题成为现实以前,尽量避免,或有所准备。 一、引言 随着社会的发展,影响交通系统的相关因素越来越多,而我们又总是力求寻找最优解决方案,以期解决各种交通问题,然而,在现实交通环境中,某些领域需要大量资金的投入,某些领域还隐含着很多不安全因素,这就使得寻求最优方案的期望变得很渺茫,甚至是不可能现实的。此时,应用计算机技术进行交通仿真就成为了一种很有效的技术手段。计算机仿真是目前人们进行科学研究和解决现实中难以实现问题的一种主要方法。【l】根据研究对象的不同,交通仿真有两种主要模型:宏观仿真模型、中宏观仿真模型和微观仿真模型【2】 交通仿真系统可以为交通管理系统设计方案评价、道路几何设计方案评价、交通工程理论研究、交通安全分析、新交通技术和设想的测试以及人员培训等诸多应用领域提供方便、高效的实验分析工具。交通仿真为交通道路设计规划提供技术依据,而且还可以对各种参数进行比较和评价,以及环境影响的评价等。随着计算机和信息技术的发展,及其在交通领域日益广泛的应用,智能交通系统(ITS)无疑将成为交通领域和其它相关领域中极具前景的研究方向。 二、交通仿真原理及交通仿真模型建立 (一)、交通仿真技术的发展历程简介 早期的仿真模型主要为宏观模型,模型的描述精度较低,适应的路网范围较小。七、八十年代,由于计算机技术的迅速发展,微观交通仿真模型开始出现,模型描述精度迅速提高,功能更加多样,较多地应用于交通设计和信号控制方案的优化等方面。九十年代初以来,随着智能交通系统研究的开展,开发了一大批能够定量评价和分析智能交通系统效益的仿真模型和软件系统,目前的一些
车辆系统动力学 作业
车辆系统动力学作业 课程名称:车辆系统动力学 学院名称:汽车学院 专业班级:2013级车辆工程(一)班 学生姓名:宋攀琨 学生学号:2013122030
作业题目: 一、垂直动力学部分 以车辆整车模型为基础,建立车辆1/4模型,并利用模型参数进行: 1)车身位移、加速度传递特性分析; 2)车轮动载荷传递特性分析; 3)悬架动挠度传递特性分析; 4)在典型路面车身加速度的功率谱密度函数计算; 5)在典型路面车轮动载荷的功率谱密度函数计算; 6)在典型路面车辆行驶平顺性分析; 7)在典型路面车辆行驶安全性分析; 8)在典型路面行驶速度对车辆行驶平顺性的影响计算分析; 9)在典型路面行驶速度对车辆行驶安全性的影响计算分析。 模型参数为: m 1 = 25 kg ;k 1 = 170000 N/m ;m 2 = 330 kg ;k 2 = 13000 (N/m);d 2 =1000Ns/m 二、横向动力学部分 以车辆整车模型为基础,建立二自由度轿车模型,并利用二自由度模型分析计算: 1) 汽车的稳态转向特性; 2) 汽车的瞬态转向特性; 3)若驾驶员以最低速沿圆周行驶,转向盘转角0sw δ,随着车速的提高,转向盘转角位sw δ,试由 20sw sw u δδ-曲线和0 sw y sw a δ δ-曲线分析汽车的转向特性。 模型的有关参数如下: 总质量 1818.2m kg = 绕z O 轴转动惯量 23885z I kg m =? 轴距 3.048L m = 质心至前轴距离 1.463a m =
质心至后轴距离 1.585b m = 前轮总侧偏刚度 162618/k N rad =- 后轮总侧偏刚度 2110185/k N rad =- 转向系总传动比 20i =
铁道车辆系统动力学及应用-西南交通大学出版社
成都西南交大出版社有限公司关于《铁道车辆系统动力学及应用》 图书印刷项目 招标书 2018年1月25日
目录 第一部分招标公告 第二部分投标方须知 第三部分商务资料 第四部分投标相关文件格式
第一部分招标公告 根据《中华人民共和国投标招标法》有关规定,经成都西南交大出版社有限公司总经理办公会决定,现对外公开招标《铁道车辆系统动力学及应用》图书的印刷企业,兹邀请合格投标企业参加竞标。 一、招标内容: 1.招标内容为《铁道车辆系统动力学及应用》图书的印制。 2.投标人按招标人给定的样式清单,根据自身业务经营情况,以综合印张价方式报价,作为投标文件内容之一。报价单上只允许有一种报价,任何有选择报价将不予接受。投标人必须对样式清单上全部事项进行报价,只投其中部分事项投标文件无效。本投标文件中的报价采用人民币表示。 二、投标人资格要求: 1、在中华人民共和国境内注册,具有独立法人资格的印刷企业; 2、必须取得《印刷经营许可证》,且在投标时年审合格。 三、投标截止和开标时间、地点: 1.投标截止时间:2018年1月25日下午17:00(北京时间),逾期不予受理。 投标文件递交地点:成都市二环路北一段111号西南交通大学创新大厦21楼2105室 2.开标时间和地点: 2018年1月25日下午17:00 开标地点:成都市二环路北一段111号西南交通大学创新大厦21楼西南交通大学出版社 四、招标机构联系人信息: 联系人:王蕾 地址:成都市二环路北一段111号西南交通大学创新大厦21楼西南交通大学出版社 邮政编码:610031
电话:8700627 第二部分投标方须知 一、项目说明 1、“招标方”系指本次项目的招标人“成都西南交大出版社有限公司”。 2、“投标方”系指符合招标公告中投标人资格要求的投标单位: 3、“投标报价”应包含该书印刷材料成本、印刷、装订、送货下货、税金等所有费用。 4、无论投标过程中的做法和结果如何,投标方自行承担所有参加投标有关的全部费用。 二、投标文件的编写 1、投标要求 1)投标方应仔细阅读招标文件的所有内容,按招标文件的要求提供投标文件,并保证所提供的全部资料的真实性,不真实的投标文件将视为废标。 2)投标文件应备正本一份、副本一份。在每一份投标文件上要注明“正本”或“副本”字样,一旦正本和副本有差异,以正本为准。若投标文件正本和副本存在较大差异,将在评标中酌情扣分。 3)投标文件应有投标人法定代表人亲自签署并加盖法人单位公章和法定代表人印鉴或授权代表签字,装入档案袋密封,封条上须加盖投标单位印章,在投标截止时间前由法定代表人或法人委托人持本人有效身份证件递交招标单位。 4)投标人必须保证投标文件所提供的全部资料真实可靠,并接受招标人对其中任何资料进一步审查的要求。 5)投标文件所有封袋上都应写明以下内容:
汽车动力学特性仿真分析与ADAMS软件
汽车动力学特性仿真分析与ADAMS软件 封飚 内容提要:文章讨论了多体动力学的概念、方法在汽车设计领域中的应用,阐明了ADAMS软件的理论基础和计算、求解方法及其应用于整车系统动力学特性仿真模型建立、分析优化的关键步骤和原则。 关键词:汽车设计,多体动力学,仿真分析,ADAMS软件 20世纪80年代以来,汽车作为极其重要的工业产品,在交通运输领域和人民日常生活中的地位日益突出。国内、国际汽车市场的竞争变得空前激烈,用户对汽车安全性、行驶平顺性、操纵稳定性、乘坐舒适性的要求越来越高。然而,汽车本身是一个复杂的多体系统集合,外界载荷的作用更加复杂、多变,人、车、环境三位一体的相互作用,致使汽车动力学模型的建立、分析、求解始终是一个难题。基于以往的解决方法,需经过多轮样车试制,反复的道路模拟试验和整车性能试验,不仅花费大量的人力、物力,延长设计周期,而且有些试验因其危险性而难以进行。广大设计人员迫切希望找到一 种能在图纸设计阶段全面、准确地预测车辆动力学性能,并可对其性能进行优化分析的办法。ADAMS软件采用科所研究的问题囊括了宏观世界机械运动的主要问题。刚体系统与柔体系统的主要不同在于柔性部件的变形不可忽略,其逆运动是不确定的。柔体系统是一个时变、高度耦合、高度非线性的复杂系统。目前,比较系 统的研究方法有:牛顿—欧拉法、拉格朗日方程法、图论方法、凯恩方法、变分方法等。1.2 汽车多体动力学应用 多体动力学应用于汽车设计,并借以计算机仿真实现,是一项前沿技术。随着其理论研究的逐步深入,计算方法的日渐成熟以及计算机技术的迅猛发展,这门科学开始走向实用。我国目前有很多汽车制造厂家、科研 单位已经引进使用和开发了多体系统计算机仿真软件, 使我们在处理车辆复杂动态特性分析方面产生了质的飞 跃。 过去的许多情况下,不得不把计算模型简化(如单 自由度、双自由度模型),以便使用古典力学方法人工求解,对于汽车振动系统中大多数非线性原件(如轮胎、变刚度悬架、橡胶衬套等)也只能采用简易算法进行局部线性模拟,从而导致车辆的许多重要特性无法得到较精确的定量分析。现在,理论方法与计算手段的突破,使我们可以坐在办公室里研究开发“虚拟汽车”,建立“虚拟试验场”,在计算机上预测汽车的动力学性能。力学模型由线性模型发展到非线性模型,模型的自由度由 两自由度发展到数十个甚至数百个自由度。模拟计算由 稳态响应特性模拟发展到瞬态响应特性和转弯制动模拟 研究。 由车辆环境构成的开环控制系统也被具有驾驶员 13 2001-3综 述 虚拟样机模拟技术,提供了上述问题的解决方案,可以 用于指导和修正设计,按照并行工程的概念组织产品设 计到生产,从而在真正意义上实现优化的整车系统设计。1 多体动力学在汽车设计中的应用 1.1 多体动力学概述 多体动力学,包括多刚体系统动力学和多柔体系统动力学,是研究多体系统(由若干个柔性和刚性物体相互连接所组成)运动规律的科学。其中,多柔体动力学是多刚体动力学、分析力学、连续介质力学、结构动力学多学科交叉的结晶,也是航天工业、汽车工业,机器人制造业向高性能、高精度发展的必然。 这门边缘性学
交通仿真A-答案
1.交通仿真的定义 答:交通仿真是数字仿真在交通工程领域的应用,它以相似的原理、信息技术、系统工程和交通工程领域的基本理论和专用知识为基础,以计算机为工具,利用系统仿真模型模拟道路交通系统的运行状态,采用数字图形方式来描述动态交通系统,以便更好地把握和控制道路交通系统的实用科学技术。 2.交通仿真的优点 答:经济性;安全性;可重复性;易用性;可控制性;可拓展性。 3.交通仿真的功能(或应用领域) 答:在交通工程理论研究中的应用; 在道路几何设计方案评价分析中的应用; 在交通管理系统设计方案评价分析中的应用; 在道路交通安全分析中的应用; 在交通新技术和新设想测试中的应用; 在智能交通系统中的应用。 4.交通仿真的发展趋势 答:应用领域不断扩大;
健全系统后台开发技术,不断完善丰富交通仿真系统功能; 前台表现手法更加丰富; 交通仿真模型进一步完善; 快速引入新技术。 5.交通仿真的分类体系 答:交通仿真按照不同的分类标准可以得到不同的分类内容,一般来说,根据不同的仿真目的及仿真对象,交通仿真有以下几种分类方式和分类结果: ⑴从交通流理论的角度分为:微观交通仿真和宏观交通仿真; ⑵从仿真技术角度分为:连续时间仿真和离散时间仿真; ⑶从仿真实现的方式分为:理论仿真、多媒体技术仿真和人机交互方式仿真; ⑷从解决问题的对象分为:交叉口交通仿真、路段交通仿真和综合路网交通仿真; ⑸从仿真应用的研究范围分为:交通安全仿真、交通拥堵仿真、交通污染仿真、交通规划仿真、交通控制仿真、驾驶员行为仿真等。 6.
7.交通仿真技术与其他交通分析技术相比,具有的优点为? 8.宏观交通仿真的常用模型有哪些? 答:土地利用模型;车辆拥有模型;家庭收入模型;出行成本模型;出行生成模型;出行分布模型;方式划分模型;高峰时段模型;载客率模型;道路网分配模型;公共交通模型;方案评价模型。 9.宏观交通仿真的基本步骤为?