机载激光测深的技术装备
机载激光雷达外业作业流程

机载激光雷达外业作业流程机载激光雷达外业作业是一项现代化高精度测量技术的创新,该技术为大规模的地形和环境探测提供了高效、准确的方法。
本文将分为以下几个方面,对机载激光雷达外业作业流程进行详细介绍。
第一步:任务准备机载激光雷达外业作业的第一步是任务准备。
此时工作人员需要确定目标区域,叠加图像、测量坐标以及操作设备等信息,并将其整合到作业计划中。
工作人员需要组织一支具有专业技能和经验的团队,确保各项任务进度合理。
第二步:机载激光雷达数据采集机载激光雷达外业作业的第二步是机载激光雷达数据采集。
根据设定的作业计划和工作要求,机载激光雷达进行数据采集,该工作需要使用高价格的机载激光雷达设备。
数据采集要求在一定的天气、光照等条件下完成,以保证获取高质量的数据。
数据采集过程中应注意控制好航迹偏离、飞行高度、航速和航向等相关要求,从而保证数据的准确性和精度。
第三步:后台数据处理机载激光雷达外业作业的第三步是数据处理。
数据处理需要对海量的数据进行大量计算和分析,建立三维数学模型。
数据处理能力成为机载激光雷达外业作业流程中一个至关重要的环节。
在数据处理过程中,需要进行原始数据统计、分类、滤波、点云纠正等360度立体数据沉积处理工作,通过不同的数据处理方法提高产品的精度和分辨率。
第四步:产品生成机载激光雷达外业作业的第四步是产品生成。
产品生成即利用处理好的数据,在计算机软件上生成测量数据的可视化成果。
根据需要生成的产品类型不同,如数字地形模型、数字地貌模型、三维点云数据等,需要选择不同的产品工具、算法、质量控制方法来实现,以达到项目要求的精度和效益。
结语机载激光雷达外业作业流程虽然繁琐,但在科技进步的推动下,各项技术都在不断完善和更新,使得外业作业的过程更加智能、精确、高效。
机载激光雷达作为数码化地图生产的重要手段之一,其外业作业流程的优化改进将不断打破产业发展的壁垒,推进生产效率、降低成本并提升产品品质成为不可或缺的产业发展趋势与方向。
机载激光雷达航测技术
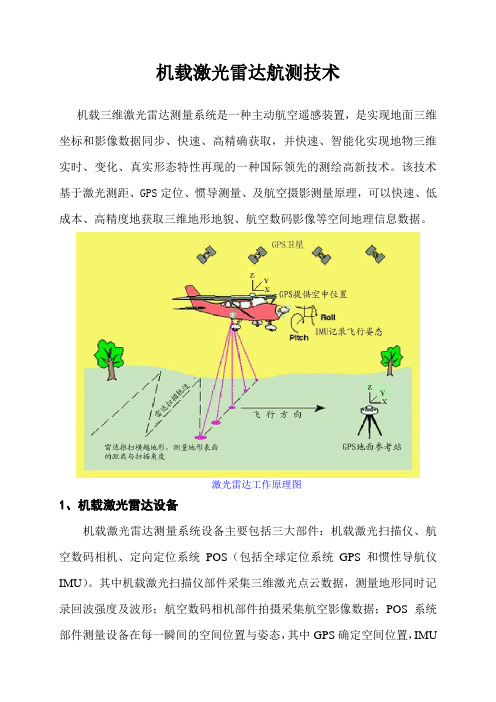
机载激光雷达航测技术机载三维激光雷达测量系统是一种主动航空遥感装置,是实现地面三维坐标和影像数据同步、快速、高精确获取,并快速、智能化实现地物三维实时、变化、真实形态特性再现的一种国际领先的测绘高新技术。
该技术基于激光测距、GPS定位、惯导测量、及航空摄影测量原理,可以快速、低成本、高精度地获取三维地形地貌、航空数码影像等空间地理信息数据。
激光雷达工作原理图1、机载激光雷达设备机载激光雷达测量系统设备主要包括三大部件:机载激光扫描仪、航空数码相机、定向定位系统POS(包括全球定位系统GPS和惯性导航仪IMU)。
其中机载激光扫描仪部件采集三维激光点云数据,测量地形同时记录回波强度及波形;航空数码相机部件拍摄采集航空影像数据;POS系统部件测量设备在每一瞬间的空间位置与姿态,其中GPS确定空间位置,IMU惯导测量仰俯角、侧滚角和航向角数据。
机载激光雷达设备主要构成天宝公司Harrier 68i是当今世界最强性能水平的全新一代机载三维激光雷达系统之一,在系统稳定性、硬件性能指标、软件配套等方面领先于其它同类产品。
Harrier 68i机载激光雷达测量系统该设备具有以下特点:➢能够接收无穷次回波的全波形数据➢最大脉冲频率可高达40万赫兹➢距离精度最高可为±2 cm➢实现与GPS、INS、数码相机等设备无缝结合➢符合激光安全标准,允许在任何高度进行安全操作➢IMU惯导仪的采样频率高达200Hz➢集成高精度航空数码相机,像素为6000万2、生产流程机载激光雷达航测作业的生产环节,主要包括航飞权申请、航摄设计、航摄数据采集、数据预处理、激光数据分类、数字高程模型(DEM)制作、数字正射影像(DOM)制作、建筑物三维白模生产等环节。
机载激光雷达航测工作流程1)航摄准备。
该阶段除需进行项目所需资料的收集以及人员和设备的配备保障等各项项目准备工作外,最主要的工作是按相关规定和流程申请获得项目测区的航飞空域使用权,这是开展后续工作的前提条件。
机载激光测深的技术装备

机载激光测深的技术装备马兰【摘要】本文介绍了机载激光测深仪的发展历史和现状及其技术原理、特点和使用范围,并简述了激光测深仪的发展趋势,仅供广大测绘工作者参考.【期刊名称】《测绘技术装备》【年(卷),期】2003(005)002【总页数】4页(P39-42)【关键词】测深仪;原理;特点;使用范围【作者】马兰【作者单位】海洋测绘研究所,300061【正文语种】中文【中图分类】P2二十一世纪被世界公认为“海洋世纪”,随着现代科学技术的不断发展,海洋价值逐渐被人们所认识,人类更加关注海洋,希望更全面、更准确地了解海洋,因而人们对海洋观测技术的要求也越来越高:人们渴望拥有能够满足大面积、高速度、高精度和低成本的现代海洋测深设备。
而机载激光测深技术借助机载,并辅之以激光扫描和GPS全球定位技术,可以满足人们对现代海洋测深的需求,因而越来越受到业内人士的重视。
本文将从发展概况、工作原理、应用范围、发展趋势几个方面对机载激光测深技术加以评述。
2.1 历史概况事实上,机载激光测深(ALH:Airborne Laser Hydrography)的设想早在20世纪60年代冷战时期就以探测潜艇设备提了出来,但因处于保密阶段并未公开。
直到1970年,其技术内容才得以公开,各国相继试制样机,积累试验成果。
1963年,Sullivan和Duntely等人发现海水也存在一个类似于大气的透光窗口,即海水对0.47~0.58mm之间波长范围内的蓝绿光的衰减系数最小,而其它波段的光在水中的衰减则较大。
这一重要的发现为人们打开了利用光电技术进行水下探测的大门。
1963~1967年美国海军委托Ohio大学进行了利用蓝绿光探测水下目标的可行性论证。
1968年,Hickman和Hogg首次论证了利用蓝绿激光探测水下目标的机载系统的可行性。
随后,于1971年美国海军研制出了一套名为PLADS (Pulsed Light Airborne Depth Sounder)的机载系统,并在直升飞机上对海洋进行了实测,这是最早的成型系统和机载探测试验。
技术参数—机载高光谱激光雷达成像系统

一、功能:将高光谱成像技术和激光雷相结合,形成先进的空、天基对地立体成像综合定性定量探测系统,结合无人机技术,可用于区域大尺度的树种识别、覆盖度、植被生长状况调查等研究。
该设备主要由主机及相关附件组成二、配置:1 、机载高光谱激光雷达一体机主机1套(包含高光谱相机1个,16线激光雷达传感器1个,高精度惯导系统1个,机载控制电脑1个,安装套件1套,高光谱几何校正软件1套,激光雷达预处理软件和高精度解算软件各1套、电池1组)2 、高光谱镜头1个(包含镜头辐射定标)3 、靶标布(1m2)3块4、无人机1套三、技术参数1、高光谱成像仪技术参数1.1、光谱范围:400-1000 nm*1.2 、光谱分辨率:<4 nm1.3、采样间隔:≤2.1 nm*1.4、2bin光谱通道数:≥2801.5、空间通道数:≥8501.6、每秒最大帧数:≥2001.7 、平均RMS半径:≤6 μm1.8 、位深度:≥12位*1.9、扫描方式:外置推扫1.10、原厂数据采集软件:可灵活设置曝光、增益、速度,动态显示实时高光谱图像和高光谱曲线1.11、原厂正射拼接几何校正软件,无人值守快速进行正射拼接形成整块区域的高光谱立方体图像1.12、原厂数据分析软件:无需第三方软件可一键获取聚类分析、单波段、真假彩色、20种以上植被指数(可自定义)、图像三维裁剪、目标光谱识别等图像,以上功能皆可实现无人值守批处理*1.13、具有基于地物光谱仪的光谱数据做机载高光谱成像反射率自动求算功能,可自动匹配计算每秒反射率,匹配精度优于1毫秒1.14、光路系统:动态实时显示高光谱图像,进行科学明暗调焦,避免人为可视化调焦误差1.15、采集画幅无限制,减少拼接误差1.16、扫描速度与积分时间自动匹配1.17、通讯方式:USB 3.01.18、重量:主机≤800g2 、激光雷达技术参数2.1 、扫描频率:≥320000点/秒2.2 、传感器数量:≥16个2.3 、最大测程:≥150 m2.4 、测距精度:±2 cm2.5 、扫描视场角:360°×30°2.6 、位置精度(水平/垂直):<0.01/<0.05m (PPK)2.7 、俯仰、横滚(RMS):≤0.05°(PPK)2.8 、速度测量精度:≤0.03 m/s2.9 、标度因数稳定性:≤0.5%3 、无人机技术参数3.1、飞行平台:材质:碳纤维;3.2、旋翼数量:63.3、起飞重量:≥10kg;3.4、飞行时间:≥30分钟;3.5、载荷:≥5kg3.6、最大平飞速度:60km/h;3.7、最大起飞海拔高度:4500米;3.8、抗风能力:最高可达6级相关要求售后服务要求:1、设备安装调试供应商免费将设备运送到用户指定地点;仪器到货后15日内,供应商免费派遣专业安装工程师上门免费进行安装、调试、操作、保养等方面,并配合用户完成验收。
精准绘就_方寸尽显——机载测深激光雷达探测水下奥秘

28自然资源科普与文化·2023年第3期精准绘就 方寸尽显文图/金鼎坚 吴 芳 高子弘 于 坤 赵 政——机载测深激光雷达探测水下奥秘第一作者简介 金鼎坚,高级工程师,主要从事航空遥感地质技术研究与应用工作。
近年来,随着卫星遥感技术的快速发展和无人机遥感技术的强势崛起,遥感,这一“神秘”的高科技越发明显地呈现出大众化趋势,在土地、矿产、海洋、测绘等自然资源各行业都获得广泛应用,大众熟知的程度也越来越高。
作为一种空间对地观测技术,遥感通常被认为只能获取地球表面信息。
实际上,一些特殊的遥感技术不仅能获取地球表面信息,还能一定程度地穿透植被、水体等,揭示地表覆盖下不为人知的秘密。
机载激光雷达测深(Airborne LidarBathymetriy )即是这样特殊的遥感技术,专门用于从空中探测浅水水下信息。
机载测深激光雷达:遥感家族中的“隐世高手”机载激光雷达遥感是以机载激光雷达为传感器的一种航空遥感技术,按照功能和应用场景的不同,可分为机载> 航空遥感飞机进行测绘作业> 无人机29自然资源科普与文化·2023年第3期陆地激光雷达和机载测深激光雷达。
机载陆地激光雷达主要应用于陆地测量,目前在地形测绘、地质灾害调查、林业调查、电力巡检、建筑物三维建模等领域广泛使用;机载测深激光雷达则具有一定的水体穿透能力,可以探测水下地形、水体光学特性及水下目标等,主要应用于海岸带、海岛礁,以及内陆河流、湖泊的测量。
机载陆地激光雷达近年来发展迅速,声名鹊起;机载测深激光雷达则显得默默无闻。
实际上,机载激光雷达测深技术的发展比机载陆地激光雷达更早。
1960年,世界上第一台激光器问世,仅隔8年,美国锡拉丘兹大学(Syracuse University )的科研人员就建造了世界遥感,顾名思义为遥远的感知,是指不直接接触目标物体,而使用传感器接收物体反射或发射的电磁波信号,揭示物体的几何与物理特性及其变化特征。
中国国防军事近代史作业——激光雷达测量技术的发展概况
《中国近代国防科技史》课程报告激光雷达(LIDAR)测量技术单位:四院五队姓名:周杰学号:GS12041103激光雷达(LIDAR)测量技术激光雷达(LIDAR)测量技术是从20世纪中后期逐步发展起来的一门高技术,可用于地球科学和行星科学等许多领域。
美国早在20世纪70年代阿波罗登月计划中就使用了激光测高技术。
20世纪80年代,激光测高技术得到了迅速发展,人们研制出了实用的、可靠的激光测高传感器,其中包括航天飞机激光测高仪( Shuttle Laser Altimeter, SLA )、火星观测激光测高仪(Mars Observer Laser Altimeter, MOLA)以及月球观测激光测高仪(LunarObserver Laser Altimeter, LOI.A )。
借助这些激光测高仪,人们可以获取地球、火星及月球上高垂直分辨率的星体表面的地形信息,这对于研究地球和火星等行星的真实形状有着重要的科学意义。
上述这些激光测高仪的激光束的指向一般是固定的,需依靠搭载激光测高仪的飞行器绕星体的周期运动来获得星体上大范围离散分布的激光脚点的高程数据。
20世纪90年代前后,随着GPS动态定位和高精度姿态确定等定位、定姿技术的发展成熟,人们设计将激光测高仪安置在飞机上,同时为了提高采点效率和带宽,采用扫描的方式来改变激光束的发射方向,将这些设备有机地集成在一起协同工作,就构成了一个机载激光雷达测量系统。
随后几年,机载激光雷达测量技术蓬勃发展,欧美等发达国家先后研制出了多种机载激光雷达测量系统。
机载激光雷达测量技术的发展为我们获取高时空分辨率的地球空间信息提供了一种全新的技术手段,使我们从传统的人工单点数据获取变为连续自动数据获取,不仅提高了观测的精度和速度,而且使数据的获取和处理朝智能化和自动化的方向发展。
机载激光雷达测量技术可广泛用于快速获取大面积三维地形数据、快速生成DEM等数字产品。
机载激光雷达测量在灾害监测、环境监测、海岸侵蚀监测、资源勘察、森林调查、测绘和军事等力一面的使用具有独特的优势和广泛的使用前景。
机载激光雷达海洋测深技术.ppt
基于声波的回声测深技术
? 机载激光测深
在含有盐、气泡和浮游生物的海水中,光波和电磁波的衰减都非常大,声波在海 水中衰减小、传播距离长,因此基于声波的回声测深技术是应用最广最为成熟的 水深测量技术。
多波束测深系统是 一 个全覆盖式声纳测深系统,其波束在海底的覆盖宽度是水 深的 3 ~7 倍,个别系统最大可达 10 倍。在深水测区具有很大的优势,但在水 深小于 50m 的浅水区或存在暗礁时,声呐测量技术往往使用受限,测量效率也 急剧下降,且存在着严重的安全隐患。
? 最佳透光窗口:波长为 0. 47 ~ 0. 58μm 之间的蓝绿光表现出了衰减系数 最小的特性。
? 特点:精度高、分辨率高、灵活机动、测点密度高、现了水陆一体 化无缝测量。
? 与多波束测深系统不同的是,机载激光测深系统由于在海底的覆盖宽度仅仅 与飞机的航高有关,而与要测量的水深无关,因此特别适合于沿岸浅水区的 全覆盖水深测量。
2020/4/16
2020/4/16
主动式遥测技术,利用的是光在海水中的 传播特性。
按照波段数量可分为双色激光机载 LiDAR 测深系统和单色激光机载 LiDAR 测深系 统。
2020/4/16
2020/4/16
2020/4/16
? 随着技术的进一步发展,当前出现了单 色激光机载 LiDAR 测深系统。单色激 光机载 LiDAR 测深系统仅采用波长为 532nm 的蓝绿激光作为激光器发射光 源,其一部分激光束到达海面后沿原路 径反射,另一部分激光束则穿透海面到 达海底,经海底反射沿原路径返回,并 被激光接收器接收。根据二者到达接收 器的时间差,即可计算出海水的深度。 采用单色激光作为发射源,既简化系统 结构,又不需双色激光同步而提高测深 精度,是机载 LiDAR 测深系统的发展 趋势
机载激光雷达参数

机载激光雷达参数
机载激光雷达(Airborne LiDAR)是一种高精度三维数据采集设备,可以用于地形测量、地表覆盖分类、建筑物地物提取等多个领域。
下面将对机载激光雷达的主要参数进行详细介绍。
1. 激光发射参数
(1)激光波长:机载激光雷达一般采用近红外波段,波长在800-1064nm之间。
(2)激光脉冲频率:指激光束发出的脉冲数,一般在1-50kHz之间。
2. 接收器参数
(1)接收器视场角:指接收器能够接受的激光束角度范围,通常在30-60度之间。
(2)接收器灵敏度:指接收器的信号增益,一般以电子伏特(V)表示。
(3)接收器噪声:指接收器在没有信号时的最小输出值,正常情况下要小于1个光子。
3. 扫描参数
(1)扫描方式:机载激光雷达主要有两种扫描方式,一种是机械扫描,另一种是固态扫描。
机械扫描一般采用旋转镜头的方式改变激光束的方向,而固态扫描利用微镜片或者转换器件快速切换激光束方向。
(2)扫描速度:机载激光雷达的扫描速度通常在10-50Hz之间。
4. 定位参数
(1)定位系统类型:机载激光雷达的定位系统通常采用GPS、IMU等。
(2)定位精度:指机载激光雷达采集的数据对应的位置精度,通常在10cm以内。
5. 数据处理参数
(1)数据格式:机载激光雷达数据格式通常为LAS或ASCII格式。
(2)能量密度:指激光雷达扫描的数据点密度,一般在1-30点/m2之间。
(3)分辨率:指数据采集的最小细节尺寸,一般在10-50cm之间。