_语音遥控小汽车系统设计
基于凌阳SPCE061A的语音控制小车设计
语音控制是最为直接的人机对话方式,而小车以其生动、典型、学习形式喜闻乐见、涉及知识面广等特点,可作为电子类专业同学们学习、实践的良好载体。
凌阳SPCE061A单片机,具有简单的语音处理功能,不需要外挂语音处理芯片,因此采用SPCE061A作为主控芯片。
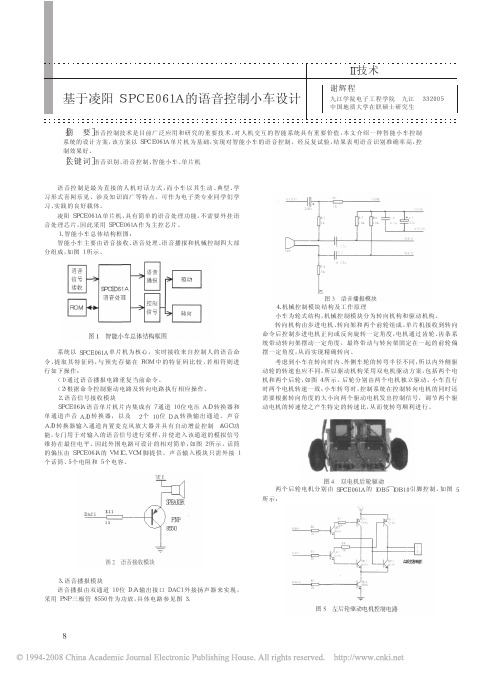
1、智能小车总体结构框图:智能小车主要由语音接收、语音处理、语音播报和机械控制四大部分组成,如图1所示。
图1智能小车总体结构框图系统以SPCE061A单片机为核心,实时接收来自控制人的语音命令,提取其特征码,与预先存储在ROM中的特征码比较,若相符则进行如下操作:(1)通过语音播报电路重复当前命令。
(2)根据命令控制驱动电路及转向电路执行相应操作。
2、语音信号接收模块SPCE06lA语音单片机片内集成有7通道10位电压A/D转换器和单通道声音A/D转换器,以及2个10位D/A转换输出通道。
声音A/D转换器输入通道内置麦克风放大器并具有自动增益控制(AGC)功能,专门用于对输入的语音信号进行采样,并使进入该通道的模拟信号维持在最佳电平。
因此外围电路可设计的相对简单,如图2所示。
话筒的偏压由SPCE06lA的VMIC、VCM脚提供。
声音输入模块只需外接1个话筒、5个电阻和5个电容。
图2语音接收模块3、语音播报模块语音播报由双通道10位D/A输出接口DAC1外接扬声器来实现,采用PNP三极管8550作为功放,具体电路参见图3。
图3语音播报模块4、机械控制模块结构及工作原理小车为轮式结构,机械控制模块分为转向机构和驱动机构。
转向机构由步进电机、转向架和两个前轮组成。
单片机接收到转向命令后控制步进电机正向或反向旋转一定角度,电机通过齿轮、齿条系统带动转向架摆动一定角度,最终带动与转向架固定在一起的前轮偏摆一定角度,从而实现精确转向。
考虑到小车在转向时内、外侧车轮的转弯半径不同,所以内外侧驱动轮的转速也应不同。
所以驱动机构采用双电机驱动方案,包括两个电机和两个后轮,如图4所示。
遥控小车控制系统设计
三江学院本科生毕业设计(论文)题目遥控小车控制系统设计电气与自动化工程院(系)电气工程及其自动化专业指导教师熊老师职称副教授起讫日期 2015年3月2日-2015年6月13日直螺纹接头的加工摘要当今社会,人们已经离不开遥控,研究遥控的对象越来越多,本文研究的红外遥控小车就是在这样的背景下提出的。
这款小车采用STC12C5A60S2作为控制核心,采用红外遥控原理将其应用到红外遥控小车上。
遥控器通过单片机产生38kHz方波并编码进行红外发射,小车接收信号进行解码,经单片机对信号处理,判断地址码和指令码,进行相应的控制操作。
采用PWM信号来产生不同的平均电压控制直流电机的转速。
该小车可以进行红外遥控,实现前进、后退、左转和右转等功能。
经软硬件联合调试,所设计的遥控小车运行平稳、正确,具有一定的应用价值。
关键词:红外遥控小车;STC12C5A60S2单片机;编码;解码直螺纹接头的加工ABSTRACTPeople are inseparable from the remote control in today's society, more and more remote control object is researched, this paper studies the infrared remote control car is put forward in the background.The car uses STC12C5A60S2 as the core of the control, using the principle of infrared remote control was applied to the infrared remote control car. The remote control was encoded by MCU to produce 38 kHz square wave and infrared emission , The car decoding by MCU for signal processing after receiving signal, judging address code and order code, carries on the corresponding control operation. PWM signal is used to produce different average voltage control of DC motor speed. Was realized by the infrared remote control, the car can move forward, backward, turn left and turn right, and other functions.The joint debugging of software and hardware, and the designed remote control car running smoothly and correctly.In the end ,the car has a certain application value.Key words: infrared remote control car;STC12C5A60S2 MCU;Coding;decoding 直螺纹接头的加工目录第一章绪论 (1)1.1 课题的工程背景、目的和意义 (1)1.2红外线 (1)1.2.1红外线的简介 (1)1.2.2红外线的应用 (2)1.3 国内外研究现状 (2)1.4 STC12C5A60S2单片机 (2)1.4.1 STC12C5A60S2单片机的简介 (3)1.4.2 STC12C5A60S2单片机的主要特点 (3)1.4.3 STC12C5A60S2单片机的主要参数 (3)1.5 论文的主要内容及章节安排 (3)第二章方案设计 (4)2.1 系统结构 (5)2.2模块选择 (5)2.2.1控制模块的选择 (5)2.2.2车身的选择 (6)2.2.3遥控控制模块的选择 (6)2.2.4电机的选择 (6)第三章硬件设计 (7)3.1控制模块STC12C5A60S2单片机 (8)3.2红外遥控发射模块 (9)3.3驱动模块 (10)3.4直流供电模块 (12)第四章软件设计 (13)4.1软件设计策略 (13)4.2红外发射程序 (13)4.3红外接收程序 (19)直螺纹接头的加工第五章测试环境 (20)5.1运行环境 (21)5.2小车实物图 (21)致谢 (22)参考文献 (23)直螺纹接头的加工第一章绪论1.1 课题的工程背景、目的和意义智能小车,也称轮式机器人,是以当今社会的汽车为研究对象,通过智能控制能够自动运行奔跑的机器人。
遥控智能小车课程设计
摘要介绍了语音遥控的电动小车的机械结构及控制部分.在机械结构上,对普通的玩具小车做了改进,使小车的转向更加灵活,并且在设计范围内可以实现任意角度转弯和任意速度移动;而在控制系统部分,则采用语音控制方式,使小车可以"听懂"人的命令,娱乐性和互动性更强.该小车各部分采用模块化设计,各个模块之间独立性强。
控制部分采用可编程微处理哭器,可以在不增加系统硬件的情况下方便地对系统进行二次开发。
本文对一辆小车进行了实验,实验结果表明,语音识别系统在低噪声环境中识别率很高,在噪声水平较高的场合,识别率有所下降。
小车反应灵敏。
关键词:语音识别单片机智能小车电机驱动目录绪论 (3)1总体方案 (4)1.1方案论证 (4)1.2总体方案图 (4)1.3系统工作原理 (4)2硬件设计 (5)2.1 语音识别模块 (5)2.2 电机驱动模块 (10)2.3 红外检测模块 (11)2.4 键盘电路 (12)2.5 主控芯片8051模块 (13)2.5.1单片机的电源设计 (13)2.5.2单片机复位电路 (14)3.软件设计 (14)3.1主程序 (14)3.2监控程序 (15)3.3 延时程序 (19)结论 (20)参考文献 (21)绪论在电气时代的今天,电动机一直在现代化的生产和生活中起着十分重要的作用。
无论是在工农业生产、交通运输、医疗卫生、办公,还是在日常生活中,都大量的使用着各种电动机。
而微处理器取代模式电路作为电动机控制的技术也日渐成熟。
单片机介于工业控制计算机和可编程控制器之间,他有较强的控制能力、低价的成本。
人们在选择电动机控制器时,常常是在先满足功能需要的同时,优先选择成本低的控制器。
语音遥控的电动小车的机械结构及控制部分有了新的改进。
在机械结构上,对普通的玩具小车做了改进,使小车的转向更加灵活,并且在设计范围内可以实现任意角度墨迹和任意速度移动;而在控制系统部分,则采用语音控制方式,使小车可以“听懂”人的命令,娱乐性和互动性更强。
语音控制的智能小车设计方案

语音控制的智能小车设计方案根据美国玩具协会的调查统计,近年来全世界玩具销量增幅与全世界平均GDP增幅大致相当而全世界玩具市场的内在结构比重却发生了重大变化:传统玩具的市场比重正在逐步缩水,高科技含量的电子玩具则蒸蒸日上美国玩具市场的高科技电子玩具的年销售额2004年较2003年增长52%,而传统玩具的年销售额仅增长3%英国玩具零售商协会选出的2001年圣诞最受欢迎的十大玩具中,有七款玩具配有电子元件从这些数字可以看出,高科技含量的电子互动式玩具已经成为玩具行业发展的主流本文设计一个具有语音识别功能的智能遥控小车该小车对传统的手动遥控小车的机械部分做了改进使之可以实现任意角度转向和以任意速度前进而不象一般的小车那样只能以固定角度转向和以固定速度前进因此更加接近真实的车辆本文还在小车的控制系统中采用语音识别系统,使控制者可以用语音对小车进行控制,产生相应的动作,而且小车和控制者还具有一定的交互功能1 智能小车总体结构框图智能小车主要由转向机构、驱动机构、转向控制模块、驱动控制模块、遥控模块和语音控制模块六大部分组成,如图1所示2 机械本体结构及工作原理小车为轮式结构,如图2所示机械部分分为转向机构(图中椭圆内的部分)和驱动机构(图中椭圆外部分)转向机构主要由转向电机、转向架和两个前轮组成驱动机构采用玩具小车常用的双电机驱动方案,包括两个减速电机和两个后轮转向机构工作原理为:转向时由控制者向小车发出转向信号,转向电机根据转向信号正向或反向旋转一定角度,电机通过齿轮、齿条系统带动转向架摆动一定角度,最终带动与转向架固定在一起的前轮偏摆一定角度小车在转向时由于内、外侧的车轮的转弯半径不同,所以内外侧车轮的转速也不相同前轮为从动轮,会根据转弯角度的大小自动调节内、外侧车轮的转速;而后轮为主动轮,其转速分别由两个电机独立驱动,不会根据转弯半径自动调节转速因此小车转弯时,控制系统在控制转向电机的同时还需要根据转向角度的大小向两个驱动电机发出控制信号,调节两个驱动电机的转速使之产生特定的转速比,从而使转弯顺利进行在这里,转弯的角度、转速比与小车的尺寸及转弯半径有关3 控制系统控制系统包括两大部分,一部分位于遥控器内,用于识别控制者的命令并将响应的控制信号发送出去;一部分位于小车上,用于接收遥控器发出的控制信号,并根据控制信号控制转向机构和驱动机构,使小车实现预期的动作3.1 遥控器遥控器主要由语音识别模块和无线发送模块(编码芯片、射频发送模块)组成,如图3所示遥控器的工作原理为:控制者通过麦克风发出控制命令,该命令经过语音识别模块识别后,根据控制信号的类型产生一个8位的控制码,语音识别模块通过其P1端口将控制码输出至无线发送模块,然后语音识别模块发出控制信号,控制无线发送模块将该控制码以无线电波形式发送出去,车载控制部分接收到后便控制小车产生预期的动作3.1.1 语音控制模块语音控制模块主要由Sensory公司的集成语音识别芯片RSC-364组成该芯片是专门为语音控制家电产品而设计的,外围辅助器件少,采用典型应用电路时只需要一个麦克风、一个晶体振荡器、一个小场声器和几个电阻、电容即可该芯片内部集成了语音识别、语音合成、语音身份识别、录音回放功能芯片内部采用的是神经网络的语音识别算法,和说话者无关的语音识别准确率可以达到97%,和说话者相关的语音识别准确率可以达到99%该芯片的功能框图如图4所示该芯片内部集成了一个八位的可编程微处理器,对外有16个可编程控制的I/O口,16位地址总线和8位数据总线及相应的控制信号,可方便地扩展外部ROM以及与外部器件通讯本文中对RSC-364的资源使用情况为:其P1口用于传输与控制命令相应的控制码,P0.7口用于启动无线发送模块发送数据3.1.2 无线发送模块为了提高无线收发的可靠性,本文采用集成的射频发送模块F05C和编码芯片PT2262组成无线编码发送模块PT2262外围电路简单,只需外接一个电阻调节载波频率PT2262的电源电压范围广,4~15V均能正常工作PT2262可以对12位二进制信号进行编码输出,足以满足本文的要求PT2262的控制也极为简单,在PT2262的TE端为0时,PT2262自动将地址引脚和数据引脚A0~A11的数据编译成适合RF电路发射的串行编码波形,然后通过DOUT 端口串行输出应用时只需将PT2262的DOUT端口连接到RF电路的数据输入端即可将数据通过无线电波发送出去本文中RF电路选用集成的射频发送模块F05C F05C采用声表谐振器稳频,SMT树脂封装,频率一致性较好,免调试F05C具有较宽的工作电压范围及低功耗特性,当发射电压为3V时,发射电流约为2mA,发射功率较小;12V为最佳工作电压,具有较好的发射效果,发射电流约为5~8mA;当发射电压大于l2V时直流功耗增大,有效发射功率不再明显提高F05系列采用AM方式调制以降低功耗[1]因为本文无线发送的命令的种类较少,所以不需要全部使用PT2262的12个数据引脚,鉴于RSC-363内核和AT89C51均为八位机,为了数据传输方便,只使用PT2262的低八位数据引脚传输数据,其余的四个数据引脚直接接地,其上数据没有意义3.2 车载控制部分车载控制部分主要由无线接收模块(射频接收模块、解码芯片)、车载处理器和电机控制模块(图中略)组成,如图5所示其功能就是接收遥控器发出的无线电信号并解码,送入车载处理器,经过计算产生相应的控制信号,控制三个电机工作,使小车产生预期的动作3.2.1 无线接收模块无线接收模块由射频接收模块J05C和解码芯片PT2272组成J05C是F05C的配对功能模块J05C采用超外差电路结构和温度补偿电路,具有较高的接收灵敏度及稳定性,芯片内含低噪声射频放大器、混频器、本地振荡器、中频放大器、滤波器及限幅比较器,输出为数据电平信号其功能是自动接收无线电波并对电波进行处理,输出适合解码芯片解码或单片机解码的波形PT2272是PT2262的配对芯片,其外围电气特性和PT2262相同工作时,PT2272自动对从DIN端口输入的编码波形进行解码,解码成功则将地址和数据输出到对应的地址引脚和数据引脚,同时将EN端口置为高电平,数据在各个引脚上的排列顺序和PT2262完全相同和无线发送模块相对应,这里也只使用其低八位数据引脚传输八位有效数据3.2.2 车载处理器车载处理器采用常用的MCS-51系列单片机AT89C51 AT89C51是8位单片机,其片内集成有4K的程序存储器,能够满足一般的应用单片机有8位外部数据总线和16位外部寻址地址线,支持外扩程序存储器和数据存储器片内集成两个16位的定时/计数器,两个外部中断口,32位双向I/O口[2]在本文的应用中,单片机采用中断工作方式P2口和无线接收模块的解码芯片的数据端口的低8位相连,用于接收解码的数据解码芯片的EN端口和单片机的外部中断口INT0相连,解码芯片解码成功时会自动通过EN 端口向单片机申请中断,单片机进入中断处理程序,接收解码后数据因为EN端口是高电平有效,而INT0是低电平有效,所以EN需要通过一个反向器和INT0连接单片机的P1口用来输出PWM波,控制转向电机和两个驱动电机每个电机需要两个端口进行驱动,分别用于电机的正反向选择P1口每位的具体定义为:P1.0和P1.1用来控制转向电机的正转和反转;P1.2和P1.3用来控制左后轮驱动电机的正转和反转;P1.4和P1.5用来控制右后轮驱动电机的正转和反转3.2.3 电机控制模块电机的驱动采用双向PWM脉宽调制方式控制采用这种控制方式可以方便地实现电机的正反转和转速变化[3]电机驱动电路如图6所示其工组原理为当P1.0端口为高电平、P1.1端口为低电平时,三极管Q5导通,Q5导通又导致Q3和Q2导通,则电流从电源通过Q2、直流电机和Q3构成回路;当P1.0端口为低电平、P1.1端口为高电平时,三极管Q6导通,Q6导通又导致Q4和Q1导通,则电流从电源通过Q1、直流电机和Q4构成回路,且电流方向和前面相反,即电机转向发生变化通过控制P1.0口和P1.1口电平的高低和高电平导通的时间,就可以控制电机的正、反转和转速4 实验结果本文设计的小车的长度为210mm,宽度为100mm,前后轮距为150mm,小车的最大转弯角度为45度小车可以识别的总的命令条数为16条左转和右转各4条,对应的转向角度分别为5度、15度、25度、45度;停止1条;前进5条,对应于五级不同的前进速度;后退两条,对应两级不同的后退速度小车的各级转弯角度对应的转弯半径及两个电机的转速比的关系如表1所示该小车各部分采用模块化设计各个模块之间独立性强控制部分采用可编程微处理器,可以在不增加系统硬件的情况下方便地对系统进行二次开发本文对一辆小车进行了实验,实验结果表明语音识别系统在低噪声环境中识别率很高,在噪声水平较高的场合,识别率有所下降小车反应灵敏。
单片机类毕业设计题目汇总

单片机类毕业设计题目汇总1.电子时钟的设计2.全自动节水灌溉系统-硬件部分3.•数字式温度计的设计4.・温度监控系统设计5.•基于单片机的语音提示测温系统的研究6.•简易无线电遥控系统7.•数字流量计8.•基于单片机的全自动洗衣机9.•水塔智能水位控制系统10.・温度箱模拟控制系统11.•超声波测距仪的设计12.•基于51单片机的LED点阵显示屏系统的设计与实现16x16点阵显示屏13.•基于AT89S51单片机的数字电子时钟14.•基于单片机的步进电机的控制15.•基于单片机的交流调功器设计16.•基于单片机的数字电压表的设计17.•单片机的数字钟设计18.智能散热器控制器的设计19.•单片机打铃系统设计20.•基于单片机的交通信号灯控制电路设计21.•基于单片机的电话远程控制家用电器系统设计22.•基于单片机的安全报警器23.•基于单片机的八路抢答器设计24.•基于单片机的超声波测距系统的设计25.•基于MCS-51数字温度表的设计26.•电子体温计的设计27.•基于AT89C51的电话远程控制系统28.•基于AVR单片机幅度可调的DDS信号发生器29.•基于单片机的数控稳压电源的设计30.•基于单片机的室内一氧化碳监测及报警系统的研究31.•基于单片机的空调温度控制器设计32.•基于单片机的可编程多功能电子定时器33.•单片机的数字温度计设计34.•红外遥控密码锁的设计35.•基于51单片机的语音识别系统设计36.•家用可燃气体报警器的设计37.•基于数字温度计的多点温度检测系统38.•基于凌阳单片机的语音实时采集系统设计39.•基于单片机的数字频率计的设计40.•基于单片机的数字电子钟设计41.•设施环境中温度测量电路设计42.•汽车倒车防撞报警器的设计43.•篮球赛计时记分器44.•基于单片机的家用智能总线式开关设计45.•设施环境中湿度检测电路设计46.•基于单片机的音乐合成器设计47.•设施环境中二氧化碳检测电路设计48.•基于单片机的水温控制系统设计49.•基于单片机的数字温度计的设计50.•基于单片机的火灾报警器51.•基于单片机的红外遥控开关设计52.•基于单片机的电子钟设计53.•基于单片机的红外遥控电子密码锁54.•大棚温湿度自动监控系统55.•基于单片机的电器遥控器的设计56.•单片机的语音存储与重放的研究57.•基于单片机的电加热炉温度控制系统设计58.•红外遥控电源开关59.•基于单片机的低频信号发生器设计60.•基于单片机的呼叫系统的设计61.•基于PIC16F876A单片机的超声波测距仪62.•基于单片机的密码锁设计63.•单片机步进电机转速控制器的设计64.•由AT89C51控制的太阳能热水器65.•防盗与恒温系统的设计与制作66.gT89S52单片机实验系统的开发与应用67.•基于单片机控制的数字气压计的设计与实现68.•智能压力传感器系统设计69.•智能定时器70.•基于单片机的智能火灾报警系统71.•基于单片机的电子式转速里程表的设计72.•公交车汉字显示系统73.•单片机数字电压表的设计74.•精密VF转换器与MCS-51单片机的接口技术75.•基于单片机的居室安全报警系统设计76.•基于89C2051 IC卡读/写器的设计77.•P C机与单片机串行通信设计78.球赛计时计分器设计79.•松下系列PCL五层电梯控制系统设计80.・自动起闭光控窗帘设计81.•单片机控制交通灯系统设计82.•基于单片机的电子密码锁83.•基于51单片机的多路温度采集控制系统84.•点阵电子显示屏-毕业设计85.•超声波测距仪-毕业设计86.•单片机对玩具小车的智能控制毕业设计论文87.•基于单片机控制的电机交流调速毕业设计论文88.单片机智能火灾报警器毕业设计论文89.•基于单片机的锁相频率合成器毕业设计论文90.•单片机控制的数控电流源毕业设计论文91.•基于单片机的数字显示温度系统毕业设计论文92.•单片机串行通信发射部分毕业设计论文93.•基于单片机控制直流电机调速系统毕业设计论文94.•单片机控制步进电机毕业设计论文95.•基于MCS51单片机温度控制毕业设计论文96.•基于单片机的自行车测速系统设计97.•单片机汽车倒车测距仪98.•基于单片机的数字电压表99.•单片机脉搏测量仪100.•单片机控制的全自动洗衣机毕业设计论文101.•基于单片机的电器遥控器设计102.•单片机控制的微型频率计设计103.•基于单片机的音乐喷泉控制系统设计104.等精度频率计的设计105.・自行车里程,速度计的设计106.•基于单片机的数字电压表设计107.・自行车车速报警系统108.•大棚仓库温湿度自动控制系统109.・自动剪板机单片机控制系统设计110.•单片机电器遥控器的设计111.•基于单片机技术的自动停车器的设计112.•基于单片机的金属探测器设计113.・ATMEIL AT89系列通用单片机编程器的设计114.•单片机水温控制系统115.•基于单片机的IC卡智能水表控制系统设计116.•基于MP3格式的单片机音乐播放系统117.•节能型电冰箱研究118.•基于单片机控制的PWM 调速系统119.•交流异步电动机变频调速设计120.•基于单片机的数字温度计的电路设计121.•基于Atmel89系列芯片串行编程器设计122.•基于MCS-51通用开发平台设计123.•基于单片机的实时时钟124.•用单片机实现电话远程控制家用电器125.中频感应加热电源的设计126.•家用豆浆机全自动控制装置127.•基于ATmega16单片机的高炉透气性监测仪表的设计128.•用单片机控制的多功能门铃129.•基于8051单片机的数字钟130.红外快速检测人体温度装置的设计与研制131.・三层电梯的单片机控制电路132.•交通灯89C51控制电路设计133.•基于单片机的短信收发系统设计一一硬件设计134.•大棚温湿度自动控制系统135.串行显示的步进电机单片机控制系统136.•微机型高压电网继电保护系统的设计137.•基于单片机mega16L的煤气报警器的设计138.•智能毫伏表的设计139.•基于单片机的波形发生器设计140.•基于单片机的电子时钟控制系统141.•火灾自动报警系统142.•基于PIC16F74单片机串行通信中继控制器143.•遥控小汽车的设计研究144.•基于单片机对氧气浓度检测控制系统145.•单片机的数字电压表设计146.•基于单片机的压电智能悬臂梁振动控制系统设计147.•单片机的打印机的驱动设计148.•单片机音乐演奏控制器设计149.・自动选台立体声调频收音机150.•直流数字电压表的设计151.•具有红外保护的温度自动控制系统的设计152.•基于单片机的机械通风控制器设计153.•音频信号分析仪154.•单片机波形记录器的设计155.•公交车站自动报站器的设计156.•基于单片机的温度测量系统的设计157.•龙门刨床的可逆直流调速系统的设计158.•智能型充电器的电源和显示的设计159.・80C196MC控制的交流变频调速系统设计160.•步进电机运行控制器的设计161.・自动车库门的设计162.•家庭智能紧急呼救系统的设计163.•单片机病房呼叫系统设计164.•电子闹钟设计165.•电子万年历设计166.•定时闹钟设计167.•计算器模拟系统设计168.•数字电压表设计169.•数字定时闹钟设计170.•数字温度计设计171.•数字音乐盒设计172.•智能定时闹钟设计173.电子风压表设计174.・8x8LED点阵设计175.•可编程的LED (16x64)点阵显示屏176.•无线智能报警系统177.・温湿度智能测控系统178.•单片机电量测量与分析系统179.•多通道数据采集记录系统180.•单片机控制直流电动机调速系统181.•步进电动机驱动器设计182.・DS18B20温度检测控制183.・6KW电磁采暖炉电气设计184.•基于电流型逆变器的中频冶炼电气设计185.•新型电磁开水炉设计186.•新型洗浴器设计187.•中频淬火电气控制系统设计188.•中型电弧炉单片机控制系统设计189.•基于单片机的电火箱调温器190.•LCD数字式温度湿度测量计191.•单片机与计算机USB接口通信192.•万年历的设计193.•基于单片机的家电远程控制系统设计194.•超声波测距器设计195.•多路温度采集系统设计196.•交通灯控制系统设计197.•数字电容表的设计198.・100路数字抢答器设计199.•单片机与PC串行通信设计200.•基于DS18B20温度传感器的数字温度计设计201.•基于单片机的大棚温、湿度的检测系统202.•智能型客车超载检测系统的设计203.•语音控制小汽车控制系统设计204.•万年历可编程电子钟控电铃205.•基于单片机的步进电机控制系统206.•基于MCS-51单片机温控系统设计的电阻炉207.•基于单片机89C52的啤酒发酵温控系统208.•基于单片机的温度采集系统设计209.•PIC单片机在空调中的应用210.•列车测速报警系统211.•多点温度数据采集系统的设计212.•遥控窗帘电路的设计213.•基于单片机的数字式温度计设计214.-87C196MC单片机最小系统单板电路模板的设计与开发215.•基于87C196MC 交流调速实验系统软件的设计与开发216.•基于87C196MC 交流调速系统主电路软件的设计与开发217.•基于80C196MC 交流调速实验系统软件的设计与开发218.•基于单片机的水位控制系统设计219.•基于单片机的液位检测220.•基于单片机的定量物料自动配比系统221.•智能恒压充电器设计222.•单片机的水温控制系统223.•基于单片机的车载数字仪表的设计224.•基于单片机的室温控制系统设计225.•基于MAX134与单片机的数字万用表设计226.•基于单片机防盗报警系统的设计227.・18B20多路温度采集接口模块228.•基于单片机的乳粉包装称重控制系统设计229.•基于单片机的户式中央空调器温度测控系统设计230.•步进电机实现的多轴运动控制系统231.•IC卡读写系统的单片机实现232.•单片机电阻炉温度控制系统设计233.•单片机控制PWM直流可逆调速系统设计234.•单片机自动找币机械手控制系统设计235.•基于89C52的多通道采集卡的设计236.•基于AT89C51单片机控制的双闭环直流调速系统设计237.•单片机控制的PWM 直流电机调速系统的设计238.•基于单片机的电阻炉温度控制系统设计239.•公交车报站系统的设计240.•智能多路数据采集系统设计241.•基于单片机控制的红外防盗报警器的设计242.•篮球比赛计时器设计243.•超声波测距仪的设计及其在倒车技术上的应用244.•汽车侧滑测量系统的设计245.・自动门控制系统设计246.•基于51单片机的液晶显示器设计247.•基于AT89C51单片机的电源切换控制器的设计248.•基于单片机的普通铣床数控化设计249.•基于AT89C51单片机的号音自动播放器设计250.•基于单片机的玻璃管加热控制系统设计251.•中央冷却水温控制系统252.•基于单片机的无刷直流电机控制系统设计253.•锅炉汽包水位控制系统254.•基于单片机的鱼用投饵机自动控制系统的设计255.-空调温度控制单元的设计256.•软胶囊的单片机温度控制(硬件设计)257.•小型户用风力发电机控制器设计258.・自动售报机的设计259.•无线表决系统的设计260.•微电脑时间控制器的软件设计261.•基于单片机AT89S52的超声波测距仪的研制262.•单片机教学实验板——软件设计263.•基于16位单片机的串口数据采集264.•单片机太阳能热水器测控仪的设计265.•基于单片机的简单数字采集系统设计266.•多电量采集系统的设计与实现267.・PWM及单片机在按摩机中的应用268.•基于单片机的简易GPS定位信息显示系统设计269.•基于单片机的温湿度测量系统设计270.•基于单片机的电子音乐门铃的设计271.•开关电源的设计272.•锅炉控制系统的研究与设计273.•基于ARM的嵌入式温度控制系统的设计274.•基于DS18B20的多点温度巡回检测系统的设计275.•基于单片机的频率计设计276.仓储用多点温湿度测量系统277.•基于单片机的超声波液位测量系统的设计278.•基于单片机的多功能函数信号发生器设计279.•噪音检测报警系统的设计与研究280.•转速、电流双闭环直流调速系统设计281.•基于单片机程控精密直流稳压电源的设计282.•模拟电梯的制作283.•基于AT89C51单片机的步进电机控制系统284.•超声波倒车雷达系统硬件设计285.•基于单片机实现汽车报警电路的设计286.•采用单片机技术的脉冲频率测量设计287.•智能豆浆机的设计288.•电话远程监控系统的研究与制作289.分立式生活环境表的研究与制作多功能电子万年历)290.•高效智能汽车调节器291.•全自动汽车模型的制作292.•智能红外遥控暖风机设计293.•蔬菜公司恒温库微机监控系统294.•数字触发提升机控制系统295.•基于单片控制的交流调速设计296.•基于单片机的多点无线温度监控系统297.•单片机控制的霓虹灯控制器298.•基于单片机的数码录音与播放系统299.全自动洗衣机控制器300.・空调器微电脑控制系统301.・自动存包柜的设计302.•基于单片机的数字钟设计303.电子万年历304.•多路数据采集系统的设计305.•基于单片机步进电机控制系统设计306.•基于单片机的鸡雏恒温孵化器的设计307.•基于FPGA和单片机的多功能等精度频率计308.•基于单片机的水温控制系统309.•基于单片机的智能电子负载系统设计310.•智能电话报警器3n. •基于ADE7758的电能监测系统的设计312.•基于单片机PIC16F877的环境监测系统的设计313.•基于单片机控制动态扫描文字显示系统的设计314.•基于单片机控制发生的数字音乐盒315.•基于单片机控制文字的显示316.•基于单片机控制音乐门铃317.•智能电子密码锁设计318.•单片机电铃系统设计319.•单片机演奏音乐歌曲装置的设计320.•大功率电器智能识别与用电安全控制器的设计321.•单片机交通灯控制系统的设计322.•智能立体仓库系统的设计323.•智能火灾报警监测系统324.•基于单片机的多点温度检测系统325.•单片机定时闹钟设计326.•湿度传感器单片机检测电路制作327.•智能小车自动寻址设计--小车悬挂运动控制系统328.•单片机呼叫系统的设计329.•基于单片机的带智能自动化的红外遥控小车330.•基于单片机AT89C51的语音温度计的设计331.•基于TMS320VC33DSP 开发板制作332.*16x16点阵LED电子显示屏的设计333.•单片机实验教学平台分析334.•基于USB总线的设计与开发335.•基于单片机设计的自动售货机系统设计336.•数字温度计的设计337.生产流水线产品产量统计显示系统338.•水位报警显时控制系统的设计339.•红外遥控电子密码锁的设计340.•基于MCU温控智能风扇控制系统的设计341.•数字电容测量仪的设计342.•基于单片机的遥控器的设计343.*200电话卡代拨器的设计344.•数字式心电信号发生器硬件设计及波形输出实现345.•全氢罩式退火炉温度控制系统346.•单片机控制单闭环直流电动机的调速控制系统347.•单片机电加热炉温度控制系统348.•单片机大型建筑火灾监控系统349.•点阵式汉字电子显示屏的设计与制作350.•基于AT89C51的路灯控制系统设计351.•基于AT89C51的宽范围高精度的电机转速测量系统352.•基于DSP的电机控制353.•汽车倒车雷达354.•基于光纤的汽车CAN总线研究355.•基于AT89C51SND1C 的MP3 播放器356.•多功能频率计的设计357.•基于单片机的数字直流调速系统设计358.•单片机的智能电源管理系统359.•基于单片机的多功能智能小车设计360.•汽车防撞主控系统设计361.•单片机控制电梯系统的设计362.•电子密码锁的电路设计与制作363.•高精度超声波传感器信号调理电路的设计364.•数字电子钟的设计与制作365.•银行自动报警系统。
遥控智能小车报告
四川省第二届大学生电子设计大赛语音遥控智能小车目录四川省第二届大学生电子设计大赛 (1)语音遥控智能小车 (3)摘要 (3)关键字 (3)(一)引言 (3)(二)设计任务 (3)2.1.基本要求 (3)2.2.扩展部分 (3)(三)硬件部分 (4)3.1.单片机 (4)3.11.单片机选择 (4)3.12.凌阳单片机基本功能简介 (5)3.13.强大的语音功能 (5)3.2.障碍探测模块方案分析与比较 (6)3.21.避障器件选择 (6)3.22 器件放置位置方案选择 (7)3.23 避障方式选择 (7)3.3循线模块设计与比较 (7)3.4.智能小车驱动电路 (8)(四)软件部分 (10)4.1.介绍 (10)4.2.主要使用的函数 (10)(五)调试 (16)5.1硬件的调试 (16)5.2软件的调试 (17)5.3语音训练步骤 (17)(六)结论 (18)6.1.基本功能要求 (18)6.2.发挥部分 (19)参考文献 (19)语音遥控智能小车摘要:本语音智能小车由硬件设计模块与软件设计模块两大模块组成。
硬件设计模块包括后轮驱动电路模块、循线探测模块、障碍物探测模块。
后轮驱动电路主要由L298组成,用于前进、后退、转向控制;循线探测模块利用三个光感元件,对黑色轨道进行寻迹;障碍物探测模块由对两对光电传感器组成,车头一对,车尾一对进行障碍物探测。
软件设计模块能实现智能小车的前进、后退、转向、停止、避障、表演动作以及循线等功能。
本作品以两后轮电动机为主驱动,通过各类传感器件来采集各类信息,送入主控单元SPCE061A单片机,处理数据后完成相应动作,以达到自身控制。
关键字:语音智能控制避障红外线收发循线行驶语音识别(一)引言与机器进行语音交流,让机器明白你说什么,这是人们长期以来梦寐以求的事情。
语音识别技术就是让机器通过识别和理解过程把语音信号转变为相应的文本或命令的高技术。
近二十年来,语音识别技术取得显著进步,开始从实验室走向市场。
智能小车的设计与制作
智能小车的设计与制作(二)引言概述智能小车作为当今智能科技领域的一项重要研究课题,具有广泛的应用前景和深远的影响力。
在智能小车的设计与制作过程中,需要综合应用计算机科学、机械工程、电子技术等多个学科领域的知识和技术。
本文将对智能小车的设计与制作进行详细阐述,旨在为从事相关领域研究的人员提供一些指导和参考。
正文内容:一、硬件设计1.选择合适的底盘结构:根据智能小车的用途和环境要求来选择合适的底盘结构,包括四轮驱动、两轮驱动、全向轮等类型。
2.电源系统设计:设计合理的电源系统,包括电池容量的选择、充电电路的设计以及电源管理模块的选用。
3.传感器选择和布局:根据智能小车的功能需求,选择合适的传感器,如红外线传感器、超声波传感器、摄像头等,并合理布局在小车上。
4.控制器选用:根据小车的复杂程度和功能要求,选择合适的控制器,如单片机、Arduino、树莓派等。
5.软件与硬件协同设计:设计合理的软件与硬件协同设计方案,确保硬件能够有效地被控制和驱动。
二、感知与决策系统1.数据采集与处理:通过传感器采集环境信息,并进行合理的数据处理与滤波,从而得到准确的环境状态信息。
2.环境地图构建:基于传感器数据和定位系统,构建环境地图,并将其应用于路径规划、避障等问题。
3.目标检测与识别:通过图像处理和机器学习技术,进行目标检测与识别,实现对场景中目标物体的感知与识别。
4.位置与姿态估计:利用定位系统和传感器数据,对小车的位置与姿态进行估计,以便实现精确的运动控制。
5.决策与规划算法:根据环境信息和目标要求,设计有效的决策与规划算法,使小车能够做出正确的决策和路径规划。
三、运动控制系统1.底盘控制算法:设计底盘控制算法,实现小车的运动控制,包括速度控制、转向控制等。
2.摄像头云台控制:设计摄像头云台控制算法,实现对摄像头方向的控制,以便进行目标跟踪和图像采集。
3.避障算法:设计避障算法,使小车能够基于传感器数据来避免障碍物,保障行驶的安全性。
语音控制智能小车的设计

信息工程1 系统设计■1.1 设计任务和要求本设计的目标是设计并制作一辆语音控制的智能化小车。
主要达到的要求:(1)能够实现对小车的语音控制(包括前进、倒退);(2)控制的方式是实现无线语音遥控,且控制的距离不小于5米;(3)在能实现无线语音控制的基础上能实现小车角度的控制;(4)进一步分析小车系统的定位功能,在目标场地上能实现六个目标点的坐标反馈。
■1.2 设计方案1.2.1 实现方法要求设计并制作语音控制的智能化小车(下文简称小车),能够实现对小车的语音控制,控制的方式是无线语音控制,且控制的距离不小于5米,在能实现小车基本动作的基础上实现小车左右特定角度的偏转。
本设计可分为两个系统:控制系统和小车系统。
小车系统可分为:控制模块、无线接收模块、角度控制模块、显示模块、电机驱动模块;控制系统可分为:语音识别系统、发射模块。
设计主要是采用STM32F030单片机作为小车系统的核心控制芯片;以nRF401模块作为小车的无线接收模块;以ZCC220型号的电子罗盘作为角度控制模块;显示部分则采用3连LED数码管进行显示。
控制器部分的语音识别系统采用凌阳61简易板;用nRF401模块作为控制器信号的发送部分。
小车系统的结构框图如图1所示,小车系统原理图如图2所示;1.2.2 各部分方案设计(1)控制模块采用ST公司成熟低功耗微处理器的STM32F030单片机作为主控MCU。
工作主频为48MHz,其内核为ARM 的Cortex M0架构,具备32k闪存及4k缓存,处理能力相较之前的8位或16位有很大的提升,同时在功耗上有所降低。
(2)无线接收模块采用nRF401无线收发模块。
nRF401可以实现高效的无线传输,传输的速率可达20K,发射功率可调,最大发射功率在+10dBm,灵敏度在-105dBm。
天线接口设计为差分天线,可以使用低成本的PCB天线[1]。
nRF401天线在硬件设计接法简单,数据在传输过程简单且比较稳定,传输抗干扰能力强,误码率小。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2012届毕业生毕业论文题目: 语音遥控小汽车控制系统设计院系名称:电气工程学院专业班级:自动化F0803 学生姓名:申娇学号: 2008482800311 指导教师:吴兰教师职称:副教授2012年5月14日摘要随着电子工业技术的发展,市场上语音遥控小汽车越来越受到人们的欢迎,在人们日常生活中起着不可忽略的作用。
目前,声控技术被广泛运用到很多领域。
例如声控手机、声控电视机、声控洗衣机、声控电脑等设备。
本论文对语音遥控小汽车的概况做了描述。
该设计在硬件方面,以凌阳SPCE061A 单片机作为本设计的控制核心,以音控小车的控制电路板作为辅助,来设计小车的动作。
在软件方面,通过C语言编程,对音控小车的进行训练以及语言命令的识别。
设计出能够根据录制设定的语音命令来控制小汽车的前进、后退、左转、右转停车等基本功能的语音遥控小汽车。
同时根据SPCE061A的语音特色,实现语音的控制功能。
关键词:语音,小汽车,SPCE061A,控制AbstractWith the development of the electronics industry,the remote voice control cars become more and more popular to people on the market.And 1t plays an important role in the daily lives of people.Currently,the voice-activated technology has been used in many fields.Such as voice-activated phone,voice-activated TV,voice-activated washing machines,voice-activated computers and other equipments.This article gives a detail to the remote voice control cars. About hardware design,the paper use Sunplus SPCE061A as the control of core,the control board of the voice-activated car as a supplement to design the action of car.About the software,we use C language programming for voice control "training" and "recognition"of the voice.design a voice remote control cat,which has the basic function to control of the car forward ,backward,turn left,turn right and stop by the set of recorded voice command.At the same time,according to the voice characteristics of SPCE061A to achieve the voice control functions.First of all,papers confirm the system of program,and then describe the working principle of each unit's software,hardware as well as introduce the main components of the system.Keywords: voice,car,SPCE061A,control目次1 引言 (2)1.1 研究背景及意义 (2)1.2 国内为研究状况 (2)2 方案论证 (2)3.1 系统结构设计 (4)3.2 音控小车控制方案 (5)3.3 音控小车车体控制方案 (5)4 系统硬件设计 (7)4.1 SPCEO61最小系统 (7)4.2 语音识别电路模块 (8)4.3 KEY模块 (9)4.4 控制板电路 (10)4.4.1 电源电路 (10)4.4.2 接口电源 (10)4.4.3 电机驱动电路 (11)5 系统软件设计 (12)5.1 主程序 (12)5.2 音控小车语音训练子系统 (13)结论 (15)致谢 (16)参考文献 (17)附录 (18)1 引言1.1 研究背景及意义近些年来,关于语音识别方面的技术已经成为了非常活跃的研究领域。
语音识别系统在我们现实生活中普及使用,已经成为各国研究语音识别的主要方向之一。
以商业玩具市场的调查结果显示,那些含有科学技术量越高的的智能玩具、电子玩具等等,它们的发展就会越迅速。
在玩具行业中,智能化玩具在玩具商业中己经势不可挡,成为了玩具发展的主流。
我国虽然是玩具生产及出口大国,但是在高科技玩具发展方面和国外相比,差距还是非常大的。
所以,及时把精力投入到广泛开展这方面的研究中,无论是对技术的创新应用,还是对社会经济快速发展,都有非常重大的现实意义。
近几十年,我国对语音识别技术方面的研究已经取得了很大的进步,各种具有语音识别功能的玩具已经从实验室中走向了市场,它的智能化操作大大的冲击了玩具的市场。
1.2 国内外研究状况随着计算机技术、传感器技术、和微电于技术的快速发展,而今声控技术已经广泛应用到社会的各个角落,给人们提供各种便利。
l、语音遥控玩具车:不仅大大提高了声控系统的滤去噪音的能力,而且在语音识别过程中,改善了我们需要注意的准确率的问题,并且利用如今正在使用的软件开发出有各种不同特色的语音芯片,我们把它集成到遥控器上,就做出了利用语音控制的声控玩具车。
2、能够识别主人的看门狗:在该系统基础上安装对说话者的语音识别功能,并将其软件硬件化,集成到芯片上。
然后将芯片放置在防盗门上,可以使它具有主人叫门立即就开门的功能。
3、在我们现实生活中不可或缺的汽车上装有的语音控制系统:在驾驶过程中,对于不便于用手的操作,可以通过声控系统实现。
但是实际中汽车里可能存在着大量的噪音,因此,滤噪也是最为关键的技术。
2 基本原理2.1 基本原理2.2 常用的实现方案可采用80C51单片机来实现,它的运用比较广泛,而且价格便宜。
但是由于它没有语音播放和语音识别的功能,所以就需要扩展一个语音播放模块和一个语音识别模块,因此就会使端口资源紧张,所以我们就必须加入一个接口扩展芯片。
另外,语音技术的发展刚刚起步,再设计的过程中我们就必须进行大量的计算,会给我们的方案带来很大的困难。
该实现方案结构如图1所示:80C51接口扩展模块接口总线语音识别模块语音播放模块电机驱动模块图1 采用80C51单片机实现方案结构图方案二:利用SPCE061A来实现语音遥控小汽车方案,因为SPCE061A内部本身就包含语音识别模块和语音播放模块,因此我们只需要添加MIC和语音播放就可以了,所以在音控小车的设计过程中,它的系统简洁,结构非常的清晰,外围设备需要比较少。
该实现方案结构如图2所示:SPCE061AMIC输入模块电机驱动模块语音输出模块图2 采用SPCE061A单片机实现方案结构图两个方案对比,第二个方案结构更简单,便于操作,因此采用第二个方案。
3 总体方案设计3.1 系统结构设计语音遥控小汽车硬件组成框图如图3:KEYMIC滤波SPCE061A功放SPK 方向控制桥路驱动控制桥路方向电机驱动电机凌阳61板控制板图3 语音遥控小汽车硬件组成本设计系统的硬件主要由凌阳61板、音控小车的控制板两部分组成。
图中凌阳61板中包含语声音输出模块功率放大环节、按键输入模块KEY、语音输入模块MIC,给我们的设计提供了极大便利。
电机的驱动电路设计,我采用了全桥驱动,通过把四个I/O端口分成两组,对两个电机分别控制,即控制它们的停止、正转和反转状态。
3.2 音控小车控制方案本设计采用语音遥控配合中断定时控制,使小车的状态发生改变。
在我们利用语音信号使小车改变状态后,即小车小车行动以后,我们可以通过向小车发出各种语音信号,使小车的运行状态发生相应的改变。
并且在小车每一次行动发生的同时,定时器立即启动,在小车发生故障时,不能够正常得接收我们所发出的语音信号,当达到了我们所定的时间,中断服务的程序就会作用,立即发出命令,使小车停止运行。
3.3 音控小车车体控制方案(1)小车前进自然状态下,因为弹簧的作用,小车的前轮要保持向前状态,因此,只需后轮向前转即可,所以我们要控制后轮电机正转就可以实现。
如图4所示:前轮驱动电机后轮驱动电机图4 小车前进(2)小车后退与小车前进相反,因为弹簧的作用,小车的前轮仍保持向前状态,因此,只需后轮向后转即可,所以我们要控制后轮电机反转就可以实现。
如图5所示:前轮驱动电机后轮驱动电机图5 小车后退(3)小车前行左转小车后轮向前转时,即后轮电机正转时,我们只需前轮向左转即可,所以我们要控制前轮电机正转就可以实现。
如图6所示:前轮驱动电机后轮驱动电机图6 小车前行左转(4)小车前行右转小车后轮向前转时,即后轮电机正转时,我们只需前轮向右转即可,所以我们要控制前轮电机反转就可以实现。
如图7所示:前轮驱动电机后轮驱动电机图7 小车前行右转相同的原理,我们还可以实现音控小车的左转倒车和右转倒车,在这里将不再多做解释。
4 系统硬件设计4.1 SPCEO61最小系统SPCEO61最小系统如图8所示,是本设计系统的核心,凌阳61单片机具有极强的处理功能,外部信息通过它处理后在传出,达到了控制的效果。
345Title NuSizeB Date:3-M File:C:\DN C84I O B 41I O B 32I O B 23I O B 14I O B 05X R E S B6V D D 7V C P 8V S S 9N C 10N C 11OSC32O12OSC32I 13XTEST 14VDD 15XICE16XICECLK 17XICESDA 18VSS 19PVIN 20DAC121DAC222VREF223VSS 24AGC 25OPI26MICOUT 27MICN 28PFUSE 29NC 30NC 31NC32M I C P 33V C M34V R T P A D 35V D D 36V M I C37V S S38N C39N C 40I O A 041I O A 142I O A 243I O A 344I O A 445I O A 546I O A 647I O A 748V S S 49V S S 50V D D H 51V D D H 52I O A 853IOA954IOA1055IOA1156IOA1257IOA1358IOA1459IOA1560XROMT 61VSS 62XSLEEP63IOB1564IOB1465IOB1366IOB1267IOB1168PVPP 69NC 70NC 71NC 72NC 73NC74V D D H75I O B 1076I O B 977I O B 878I O B 779I O B 680I O B 581N C 82N C 83U1SPEC061+C17100u C18104VSS OSCO OSCIVDD ICE EN ICE SCK ICE SDA DAC1DAC2VREF2AVSS1AGC OPI MICOUT MICN DACM I C PV C M V R T V D D AV M I C A V S S 1I O A 0I O A 1I O A 2I O A 3I O A 4I O A 5I O A 6I O A 7V S SV S S V D D HV D D H I O A 8C31104+C27100uC28104+C29100uVSSIOB11IOB12IOB13IOB14IOB15SLEEP VSS IOA15IOA14IOA13IOA12IOA11IOA10IOA9V C P V D D P R E S B I O B 0I O B 1I O B 2I O B 3I O B 4I O B 5I O B 6I O B 7I O B 8I O B 9I O B 10V D D H+C4100uC7104VSSC8100u+C5100uVSSAVSS1图8 SPCEO61最小系统4.2 语音识别电路模块语音识别电路模块包括麦克风(MIC )音频输入电路和DAC 音频输出功率放大电路电路两部分。