《传感器》作业4-7章答案
传感器技术习题答案
参考答案
1
第 1章
2
• 1.5 有一温度传感器,微分方程为30dy/dt+3y=0.15x, 其中y为输出电压(mV),x为输入温度(C)。试 求该传感器的时间常数和静态灵敏度。 • 解:传感器的微分方程为 • • 即 30dy/dt+3y=0.15x 10dy/dt+y=0.05x
A( ) [1 ( 1
2 2 ) ] ( 2 ) 2 0 0
相对误差δ=0.9469-1=-5.31%
0.9469
2 ( ) arctan [20 /(0 2 )]
2 0.4 6001000 arctan arctan 1.3125 52.70 2 2 1000 600
• 与标准形式τdy/dt+y=S0x对比 • 所以,时间常数 τ=10s
•
静态灵敏度S0=0.05 mV/C
3
• 1.6某力传感器属二阶传感器,固有频率为1000Hz, 阻尼比为0.7,试求用他测量频率为600Hz的正弦交 变力时的振幅相对误差和相位误差。 • 解:振幅相对误差 A 1 1 ω0=2π×1000rad/S,ξ=0.7,ω=2π×600rad/S
4
• 1.7 、已知某二阶系统传感器的自振频率 f0=20kHz ,阻尼 比ξ=0.1,若求出传感器的输出幅值误差小于 3%,试确定 该传感器的工作频率范围。 • 解:二阶系统传感器的幅频特性
A() 1 [1 ( / 0 )2 ]2 (2 / 0 )2
当ω = 0时,A(ω) = 1,无幅值误差,当ω > 0时,A(ω)一般不 等于1,即出现幅值误差。若要求传感器的幅值误差不大于 3%,应满足0.97 A(ω) 1.03。
传感器原理及其应用(第二版)部分习题答案

转换元件:指传感器中能将敏感元件感受的或响应的被 探测量(如位移、应变、光强等) 转换成适于传输和测量 的电信号(如电阻、电感等)的部分。
基本转换电路:将电路参数转换成便于测量的电量,如
电压、电流、频率等。
精选版ppt
3
第1章 传感器的一般特性
3、对某传感器进行特性测定所得到的一组输入—输出数 据如下:
由此可见,电桥的输出电压与匹配电阻R3和R4无关,相应的电压 灵敏度也与其无关。 但题目要求设计成四臂等阻抗电桥,因此有:Z1= Z2 = Z3= Z4。
∵ Z 1Z 2Z 0R j L ∴ Z 3 Z 4 Z 0 R jL
∴ R 3 R 4 Z 0 R jL R 2 精L 选 2 版 pp4 t 0 2 2 4 0 0 3 0 1 0 3 2 8 5 2. 3 55
当金属丝在外力作用下发生机械变形时,其电阻值将发生变化,这种 现象称为金属的电阻应变效应。
应变片是利用金属的电阻应变效应,将金属丝绕成栅形,称为敏感栅
。并将其粘贴在绝缘基片上制成精。选版ppt
10
第2章 电阻应变式传感器及其应用
5. 何为直流电桥?若按桥臂工作方式不同,可分为哪几种?各自的 输出电压及电桥灵敏度如何计算?
输入x:0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 输出y;2.2 4.8 7.6 9.9 12.6 15.2 17.8 20.1 22.1 试计算该传感器的非线性度和灵敏度。
精选版ppt
4
第1章 传感器的一般特性
解:非线性度的拟合直线采用端基直线。 设拟合直线为:y=kx+b,根据两个端点(0.1,2.2)和(0.9, 22.1),则拟合直线斜率为
Uo
《传感器与检测技术》作业及答案

《传感器与检测技术》作业及答案第一次作业1、使用一只0.2级、量程为10V的电压表,测得某一电压为5.0V,试求此测量值可能出现的绝对误差和相对误差的最大值。
2、现对一个量程为100mV,表盘为100等分刻度的毫伏表进行校准,测得数据如下。
仪表刻度值/mV 0 10 20 30 40 50 60 70 80 90 100 标准仪表示值0.0 9.9 20.2 30.4 39.8 50.2 60.4 70.3 80.0 89.7 100.0/mV绝对误差/mV修正值/mV试将各校准点的绝对误差和修正值填入上表中,并确定该毫伏表的精度等级。
3.已知对某电压的测量值U~N(50V,0.04V),若要求置信概率达到50%,求相应的置信区间。
4、甲、乙二人分别用不同的方法,对同一电感进行多次测量,结果如下(假设均无粗大误差和系统误差):甲 1.28 1.31 1.27 1.26 1.19 1.25乙 1.29 1.23 1.22 1.24 1.25 1.20写出测量结果表达式,评价哪个人的测量精密度高。
第一次作业答案1、使用一只0.2级、量程为10V的电压表,测得某一电压为5.0V,试求此测量值可能出现的绝对误差和相对误差的最大值。
答案:2、现对一个量程为100mV,表盘为100等分刻度的毫伏表进行校准,测得数据如下。
仪表刻度值/mV 0 10 20 30 40 50 60 70 80 90 100标准仪表示值0.0 9.9 20.2 30.4 39.8 50.2 60.4 70.3 80.0 89.7 100.0/mV绝对误差/mV修正值/mV试将各校准点的绝对误差和修正值填入上表中,并确定该毫伏表的精度等级。
解:仪表刻度值/mV 0 10 20 30 40 50 60 70 80 90 100标准仪表示值0.0 9.9 20.2 30.4 39.8 50.2 60.4 70.3 80.0 89.7 100.0/mV绝对误差/mV 0 0.1 -0.2 -0.4 0.2 -0.2 -0.4 -0.3 0 0.3 0 修正值/mV 0 -0.1 0.2 0.4 -0.2 0.2 0.4 0.3 0 -0.3 03.已知对某电压的测量值U~N(50V,0.04V2),若要求置信概率达到50%,求相应的置信区间。
测试技术课后题答案4传感器
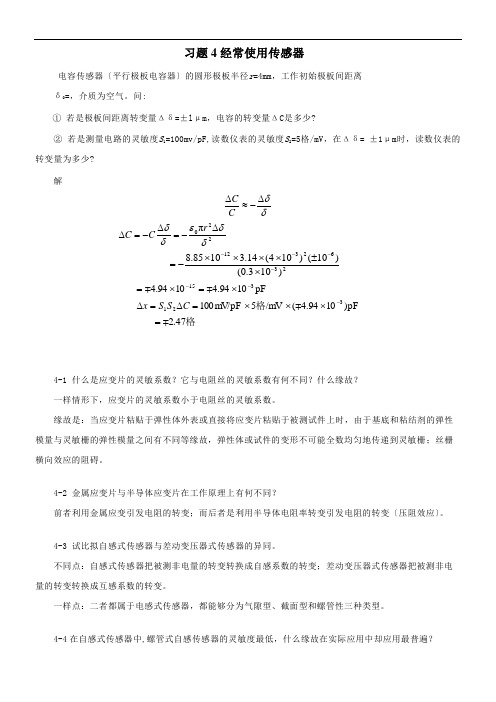
习题4经常使用传感器电容传感器〔平行极板电容器〕的圆形极板半径r =4mm ,工作初始极板间距离δ0=,介质为空气。
问:① 若是极板间距离转变量Δδ=±l μm ,电容的转变量ΔC 是多少?② 若是测量电路的灵敏度S 1=100mv/pF,读数仪表的灵敏度S 2=5格/mV ,在Δδ= ±1μm 时,读数仪表的转变量为多少?解δδ∆-≈∆C C 220πδδεδδ∆-=∆-=∆r C C 2362312)103.0()10()104(14.31085.8----⨯±⨯⨯⨯⨯-= pF 1094.41094.4315--⨯=⨯=pF )1094.4(/m V 5m V /pF 100321-⨯⨯⨯=∆=∆ 格C S S x格472. =4-1 什么是应变片的灵敏系数?它与电阻丝的灵敏系数有何不同?什么缘故?一样情形下,应变片的灵敏系数小于电阻丝的灵敏系数。
缘故是:当应变片粘贴于弹性体外表或直接将应变片粘贴于被测试件上时,由于基底和粘结剂的弹性模量与灵敏栅的弹性模量之间有不同等缘故,弹性体或试件的变形不可能全数均匀地传递到灵敏栅;丝栅横向效应的阻碍。
4-2 金属应变片与半导体应变片在工作原理上有何不同?前者利用金属应变引发电阻的转变;而后者是利用半导体电阻率转变引发电阻的转变〔压阻效应〕。
4-3 试比拟自感式传感器与差动变压器式传感器的异同。
不同点:自感式传感器把被测非电量的转变转换成自感系数的转变;差动变压器式传感器把被测非电量的转变转换成互感系数的转变。
一样点:二者都属于电感式传感器,都能够分为气隙型、截面型和螺管性三种类型。
4-4在自感式传感器中,螺管式自感传感器的灵敏度最低,什么缘故在实际应用中却应用最普遍?答:在自感式传感器中,尽管螺管式自感传感器的灵敏度最低,但示值范围大、线性也较好;同时还具有自由行程可任意安排、制造装配方便、可互换性好等优势。
由于具有了这些优势,而灵敏度低的问题可在放大电路方面加以解决,故目前螺管式自感传感器应用中最普遍。
测试与传感器作业答案

第一章 测试技术基础1.用测量范围为-50~150kPa 的压力传感器测量140kPa 压力时,传感器测得示值为+142kPa ,试求该示值的绝对误差、相对误差、标称相对误差和引用误差。
解:绝对误差2kPa140142=-=∆p相对误差 1.43%100%1401401420=⨯-=∆=p p p δ标称相对误差1.41%100%142140142=⨯-=∆='p p p δ引用误差 1%100%50150140142m =⨯+-=∆=p p p γ2.某压力传感器静态标定的结果如下表所示。
试求用端点连线拟合法拟合的该传感器输出与输入关系的直线方程,并试计算其非线性误差、灵敏度和迟滞误差。
解: 端点连线拟合法拟合的直线方程 p p U 450200==非线性误差0.1%100%2000.2100%=⨯=⨯∆=FS Y L max γ灵敏度 4mV/Pa =∆∆=pUS 迟滞误差0.3%100%2001.221100%21=⨯⨯=⨯∆=FS H Y H max γ或0.6%100%2001.2100%max =⨯=⨯∆=FS H Y H γ3.玻璃水银温度计的热量是通过玻璃温包传导给水银的,其特性可用微分方程表示(式中y 为水银柱高度,单位m ;x 为输入温度,单位℃)。
x y dtdy310123-⨯=+试确定温度计的时间常数τ、静态灵敏度k 和传递函数及其频率响应函数。
解:x y dtdy310123-⨯=+x y D 3101)23(-⨯=+x y D 31021)123(-⨯=+时间常数静态灵敏度s 51.=τC m/1050o 3-⨯=.k 传递函数 频率响应函数1511050(s)3+⨯=-s H ..15.1105.0)(j 3+⨯=-ωωj H 4. 某热电偶测温系统可看作一阶系统,已知其时间常数为0.5s ,静态灵敏度。
试计1=k 算其幅频特性误差不大于5%的最高工作频率。
传感器课后习题答案共64页文档

谢谢!
21、要知道对好事的称颂过于夸大,也会招来人们的反感轻蔑和嫉妒。——培根 22、业精于勤,荒于嬉;行成于思,毁于随。——韩愈
23、一切节省,归根到底都归结为时间的节省。。——莎士比亚
传感器课后习题答案
6、法律的基础有两个,而且只有两个……公平和实用。——伯克 7、有两种和平的暴力,那就是法律和礼节。——歌德
8、法律就是秩序,有好的法律才有好的秩序。——亚里士多德 9、上帝把法律和公平凑合在一起,可是人类却把它拆开。——查·科尔顿 10、一切法律都是无用的,因为好人用不着它们,而坏人又不会因为它们而变得规矩起来。——德谟耶克斯
传感器课后习题答案最全版

第一章传感器的一般特性1-1:答:传感器在被测量的各个值处于稳定状态时,输出量和输入量之间的关系称为传感器的静态特性;其主要指标有线性度、灵敏度、精确度、最小检测量和分辨力、迟滞、重复性、零点漂移、温漂。
1-2:答:(1)动态特性是指传感器对随时间变化的输入量的响应特性;(2)描述动态特性的指标:对一阶传感器:时间常数对二阶传感器:固有频率、阻尼比。
1-7:解:Y FS=200-0=200由A=ΔA/Y FS*100%有A=4/200*100%=2%。
精度特级为2.5级。
1-8:解:根据精度定义表达式:A=ΔA/Ay FS*100%,由题意可知:A=1.5%,Y FS=100所以ΔA=A Y FS=1.5因为 1.4<1.5所以合格。
第二章应变式传感器2-1:答:(1)金属材料在受到外力作用时,产生机械变形,导致其阻值发生变化的现象叫金属材料的应变效应。
(2)半导体材料在受到应力作用后,其电阻率发生明显变化,这种现象称为压阻效应。
2-2:答:相同点:它们都是在外界力作用下产生机械变形,从而导致材料的电阻发生变化所;不同点:金属材料的应变效应以机械形变为主,材料的电阻率相对变化为辅;而半导体材料则正好相反,其应变效应以机械形变导致的电阻率的相对变化为主,而机械形变为辅。
2-3:答:金属应变片单位应变引起的应变片电阻的相对变化叫金属应变片的灵敏度系数;它与金属丝应变灵敏度函数不同,应变片由于由金属丝弯折而成,具有横向效应,使其灵敏度小于金属丝的灵敏度。
2-4:答:因为(1)金属的电阻本身具有热效应,从而使其产生附加的热应变;(2)基底材料、应变片、粘接剂、盖板等都存在随温度增加而长度应变的线膨胀效应,若它们各自的线膨胀系数不同,就会引起附加的由线膨胀引起的应变;常用的温度补偿法有单丝自补偿,双丝组合式自补偿和电路补偿法。
2-6:答;(1)直流电桥根据桥臂电阻的不同分成:等臂电桥、第一对称电桥和第二等臂电桥;(2)等臂电桥在R>>ΔR的情况下,桥路输出电压与应变成线性关系;第一对称电桥(邻臂电阻相等)的输出电压等同于等臂电桥;第二对称电桥(对臂电阻相等)的输出电压的大小和灵敏度取决于邻臂电阻的比值,当k小于1时,输出电压、线性度均优于等臂电桥和第一对称电桥。
《传感器与智能检测技术》 第4章习题答案

第4章压电式传感器一、填空题1.压电元件一般有三类:第一类是石英晶体;第二类是压电陶瓷;第三类是高分子压电材料。
2.压电效应可分为正压电效应和逆压电效应。
3.将超声波(机械振动波)转换成电信号是利用压电材料的压电效应;蜂鸣器中发出“嘀…嘀…”声的压电片发声原理是利用压电材料的逆压电效应。
4.在实验室作检验标准用的压电仪表应采用sio2压电材料;能制成薄膜,粘贴在一个微小探头上、用于测量人的脉搏的压电材料应采用PVDF。
5.使用压电陶瓷制作的力或压力传感器可测量动态的力或压力。
6.动态力传感器中,两片压电片多采用并联接法,可增大输出电荷量;在电子打火机和煤气灶点火装置中,多片压电片采用串联接法,可使输出电压达上万伏,从而产生电火花。
7.用于厚度测量的压电陶瓷器件利用了逆压电效应原理。
二、综合题1.简述压电式加速度传感器的结构及原理。
压电式加速度传感器一般由壳体及装在壳体内的弹簧、质量块、压电元件和固定安装的基座组成。
压电元件一般由两片压电片组成,并在压电片的两个表面镀银,输出端由银层或两片银层之间所夹的金属块上引出,输出端的另一根引线就直接和传感器的基座相连。
在压电片上放置一个质量块,然后用硬弹簧对质量块预加载荷,然后将整个组件装在一个基座的金属壳体内。
为了隔离基座的应变传递到压电元件上去,避免产生假信号输出,增加传感器的抗干扰能力,基座一般要加厚或者采用刚度较大的材料制造。
使用时,将传感器基座与试件刚性固定在一起,当其感受振动时,由于弹簧的刚度相当大,质量块的质量相对较小,可以认为质量块的惯性很小。
因此可以认为质量块感受到与传感器基座相同的振动,并受到与加速度方向相反的惯性力作用,这样,质量块就有一个正比于加速度的作用力作用在压电片上。
通过压电片的压电效应,在压电片的表面上就会产生随振动加速度变化的电压,当振动频率远低于传感器的固有频率时,传感器输出的电压与作用力成正比,即与传感器感受到的加速度成正比。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、如何改善单组式变极距型电容传感器的非线性?
答:对于变极距单组式电容器由于存在着原理上的非线性,所以在实际应用中必须要改善其非线性。
改善其非线性可以采用两种方法。
(1)使变极距电容传感器工作在一个较小的范围内(0.01μm至零点几毫米),而且最大△δ应小于极板间距δ的1/5—1/10。
(2)采用差动式,理论分析表明,差动式电容传感器的非线性得到很大改善,灵敏度也提高一倍。
2、单组式变面积型平板形线位移电容传感器,两极板相对覆盖部分的宽度为4mm,两极板的间隙为0.5mm,极板间介质为空气,试求其静态灵敏度?若两极板相对移动2mm,求其电容变化量。
已知:b=4mm,δ=0.5mm,ε0=8.85×10-12F/m 求:
(1)k=?;(2)若△a=2mm时△C=?。
6、画出电容式加速度传感器的结构示意图,并说明其工作原理。
答:电容式加速度传感器的结构示意图为:
其中:1、5为两个固定极板;2为壳体;3为支撑弹簧片;4质量块;A面和B面为固定在质量块上的电容器的极板。
当测量垂直方向上直线加速度时,传感器的壳体2固定在被测振动体上,振动体的振动使壳体相对质量块运动,因而与壳体固定在一起的两固定极板1、5相对质量块4运动,致使上固定极板5与质量块4的A面组成的电容器Cx1以及下固定极板与质量块4的B面组成的电容器Cx2随之改变,一个增大,一个减小,它们的差值正比于被测加速度,而实现测量加速度的目的。
1、某霍尔元件l 、b 、d 尺寸分别为1.0cm ×0.35cm ×0.1cm ,沿l 方向通以电流I =1.0mA ,在垂直于lb 面方向加有均匀磁场B=0.3T ,传感器的灵敏度系数为22V/A ·T ,试求其输出霍尔电动势及载流子浓度。
已知:l ×b ×d=1.0cm ×0.35cm ×0.1cm ;I =1.0mA ;B=0.3T ;k H =22V/A ·T ;求:U H =?;n=?
解:如图
IB IB V IB k U H H 33106.63.0100.122--⨯=⨯⨯⨯==
2、试说明霍尔式位移传感器的输出U H 与位移x 成正比关系。
答:因为霍尔电压为:IB k U H H =,若I 一定,而使霍尔元件在一个沿空间均匀梯度的磁场中运动即:x k B 1=。
则有:kx x Ik k U H H ==1,所以霍尔式位移传感器的输出U H 与位移x 成正比关系。
第六章
1、什么是压电效应?
答:沿着一定方向对某些电介质加力而使其变形时,在一定表面上产生电荷,当外力取消,又重新回到不带电状态,这一现象称为正压电效应。
当在某些电介质的极化方向上施加电场,这些电介质在一定方向上产生机械变形或机械压力,当外加电场散去,这些变形和应力也随之消失,此即称为逆压电效应。
2、为什么压电传感器不能测量静态物理量?
答:压电元件送入放大器的输入电压
由上式可知,用·当作用在压电元件上的力是静压力(ω=0)时,前置放大器输入电压等于零。
因为电荷就会通过放大器的输入电阻和传感器本身的泄漏电阻漏掉。
所以压电传感器不能测量静态物理量。
第七章
1、简述利用CCD 进行工件尺寸测量的原理及测量系统的组成。
答:利用CCD 进行工件尺寸测量的原理是根据工件成像轮廓覆盖的光敏单元的数量来计算工件尺寸数据。
如果在光学系统放大率为1/M 的装置中,有:
M d Nd L )2(±= 式中:L —工件尺寸;N —覆盖的光敏单元数;d —相邻光敏单元中心距离(±2d 为图像末端两个光敏单元之间可能的最大误差)。
CCD 测量系统由光学系统、图像传感器和微处理机等组成。
2、利用由斯乃尔定律推导出的临界角θc 表达式,计算水(n=1.33)与空气(n ≈1)分界面的θc 的值。
已知:n 0=1;n 1=1.33。
求:θc=?
解: ∵ θθ'=sin sin 01n n 而:θ/=900
,θ=θc ∴ 01075.48)33.1/1arcsin()/arcsin(===n n c θ 8、求n 1=1.46,n 2=1.45的光纤的NA 值;若外部的n 0=1,求最大入射角θc =?
已知:n 1=1.46;n 2=1.45;n 0=1 求:NA=?;θm =?
解①: 173.0)10.213.2()
(sin 2/12/122210=-=-==n n n NA C θ
3、试述光栅式传感器的基本工作原理。
答:光栅式传感器是利用光栅的莫尔条纹进行测量测。
光栅式传感器一般由光源、标尺光栅、指示光栅和光电器件组成。
测量时取两块光栅常数相同的光栅,其中一块用作标尺光栅,它可以移动(或固定不动),另一块用作指示光栅,它固定不动(或可以移动),两者刻线面相对,中间留有很小的间隙相叠合,组成光栅副。
将其置于光源和透镜形成的平行光束的光路中,若两光栅栅线之间有很小的夹角,则在近似垂直于栅线方向上显现出比栅距宽很多的明暗相间的莫尔条纹,当标尺光栅沿垂直于栅线方向每移过一个栅距时,莫尔条纹近似沿栅线方向移过一个条纹间距。
用光电器件接收莫尔条纹信号,经电路处理后用计数器计数,可得到标尺光栅移过的距离,实现测量位移的目的。