常规 id控制器与模糊控制器的比较
几种控制方法比较
几种控制方法的性能比较专业: 控制理论与控制工程 姓名: 周燕红 学号: 200930210690摘要:本文对同一控制对象分别采用常规PID 控制,模糊控制和基于遗传算法的PID 控制进行仿真,并对仿真结果进行分析,从而得出各个控制方法的性能优劣。
关键字:常规PID ;模糊控制器;遗传算法1 常规PID 控制1.1 PID 控制原理在模拟控制系统中,控制器最常用的控制规律是PID 控制。
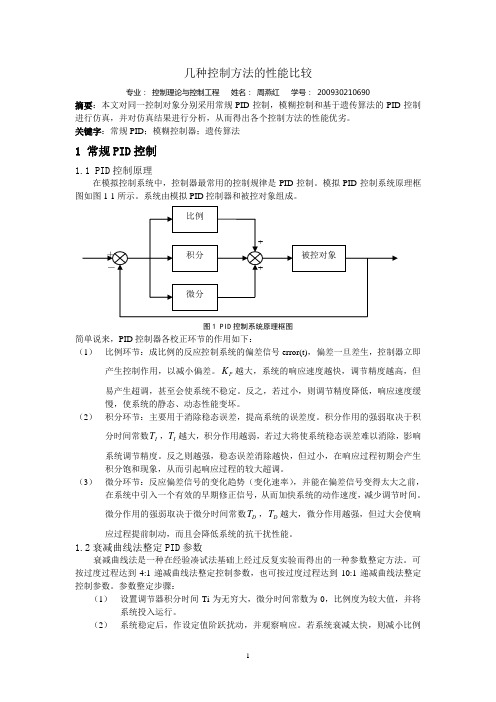
模拟PID 控制系统原理框图如图1-1所示。
系统由模拟PID 控制器和被控对象组成。
图1 PID 控制系统原理框图简单说来,PID 控制器各校正环节的作用如下:(1) 比例环节:成比例的反应控制系统的偏差信号error(t),偏差一旦差生,控制器立即产生控制作用,以减小偏差。
P K 越大,系统的响应速度越快,调节精度越高,但易产生超调,甚至会使系统不稳定。
反之,若过小,则调节精度降低,响应速度缓慢,使系统的静态、动态性能变坏。
(2) 积分环节:主要用于消除稳态误差,提高系统的误差度。
积分作用的强弱取决于积分时间常数I T ,I T 越大,积分作用越弱,若过大将使系统稳态误差难以消除,影响系统调节精度。
反之则越强,稳态误差消除越快,但过小,在响应过程初期会产生积分饱和现象,从而引起响应过程的较大超调。
(3) 微分环节:反应偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
微分作用的强弱取决于微分时间常数D T ,D T 越大,微分作用越强,但过大会使响应过程提前制动,而且会降低系统的抗干扰性能。
1.2衰减曲线法整定PID 参数衰减曲线法是一种在经验凑试法基础上经过反复实验而得出的一种参数整定方法。
可按过度过程达到4:1递减曲线法整定控制参数,也可按过度过程达到10:1递减曲线法整定控制参数。
参数整定步骤:(1) 设置调节器积分时间Ti 为无穷大,微分时间常数为0,比例度为较大值,并将系统投入运行。
控制器类型与特点

控制器类型与特点在现代工业控制系统中,控制器是一个至关重要的元件,起着控制和调节过程的作用。
根据不同的应用需求和控制对象的特点,控制器可以分为多种类型。
本文将介绍几种常见的控制器类型及其特点。
一、比例控制器比例控制器是最简单的一种控制器类型。
它根据被控变量与设定值之间的误差大小,输出一个比例于误差的控制信号。
其计算公式为输出信号=比例增益×误差。
比例控制器具有响应快、结构简单的特点,但对于稳态误差无法完全消除。
二、积分控制器积分控制器在比例控制器的基础上引入积分环节,可以消除系统的稳态误差。
它根据误差的积分值输出控制信号,具有较强的稳定性和抗干扰能力。
然而,积分控制器响应过程中可能会出现超调和振荡现象,需要通过调节积分时间常数来平衡响应速度和稳定性。
三、微分控制器微分控制器引入了对误差变化率的反馈,用于抑制系统的振荡和提高系统的响应速度。
它根据误差的变化率输出控制信号,可以提前预测系统的输出趋势并进行控制。
微分控制器对系统的高频噪声和干扰有较好的抑制效果,但在实际应用中容易受到测量噪声的影响。
四、模糊控制器模糊控制是一种基于模糊逻辑的控制方法,能够处理非线性和复杂系统。
模糊控制器通过将输入量和输出量进行模糊化,并根据一组模糊规则进行推理和决策,从而得到相应的控制信号。
模糊控制器具有较好的适应性和鲁棒性,能够应对系统参数变化和环境变化。
然而,模糊控制器的设计和调试较为复杂,需要依靠专家经验和大量试验。
五、PID控制器PID控制器是最常见、应用范围最广的一种控制器类型。
它综合了比例、积分和微分三个环节的控制特性,能够在稳态和动态响应方面取得良好的性能。
PID控制器通过调节比例增益、积分时间常数和微分时间常数来实现不同控制需求的优化。
它广泛应用于各个领域的控制系统中,例如温度控制、流量控制和位置控制等。
综上所述,不同类型的控制器具有各自的特点和适应范围。
在实际应用中,我们需要根据控制对象的特性和控制需求选择合适的控制器类型,并通过参数调节和整定来实现最佳控制效果。
基于DCS的双容水箱液位控制系统仿真

第37卷第12期计算机仿真2020年12月文章编号:1006-9348 (2020) 12 -0219 -05基于DCS的双容水箱液位控制系统仿真孙悦,恒庆海(北京信息科技大学自动化学院,北京100192)摘要:液位控制是科研工作者研究控制理论的一种科研平台。
上述系统具有观察方便、测量灵活、直观等诸多优点,能够实 现各种控制方法的研究。
现以浙大中控CS4000过程控制装置中的双容水箱液位作为被控对象,利用实验测定法建立双容 水箱液位控制系统模型,分别设计了三种控制器:PID控制器、模糊控制器和模糊控制与PID结合控制器。
在MATLAB中对 以上三种控制方法进行SIMULINK仿真,对结果做分析与比较。
最后借助于集散控制系统平台实现对所建立的双容水箱液 位系统进行组态与调试。
结果证实,模糊控制与PID结合方法和模糊控制效果均优于传统PID控制。
关键词:双容水箱液位;模糊控制;集散控制系统中图分类号:TP273 文献标识码:BSimulation of Double - tank Water Level ControlSystem Based on D C SSUN Yue,HENG Q ing-hai(School of Automation,Beijing Information Science and Technology University,Beijing 100192, China)A B S T R A C T:Liquid level control i s a scientific research platform for researchers to study control theory.To achievea variety of control methods of research,this system has many advantages,such as convenient observation,flexiblemeasurement,intuitive,etc..CS4000 process control device in double- tank water level was as the controlled object in t h i s paper.The double- tank water level control system model was established by using the experimental method.Three controllers were designed,that is,PID controller,fuzzy controller and fuzzy control and PID combined controller.The S I M U L I N K simulation of the above three control methods was carried out based on M A T L A B,and the results were analyzed and compared.Finally,the configuration and debugging of the double- tank water level system established in this paper was realized by means of the distributed control system platform.The results confirm that the fuzzy control and PID combination method and fuzzy control effect are better than the traditional PID control.K E Y W O R D S:Double-tank water level;Fuzzy control;D C Si引言液位控制系统是将液位当作被控对象参数的控制系统[1],是比较经典的一种模型。
直流伺服电机的模糊pid控制

基于模糊PID控制的直流电动机伺服系统课程:智能控制理论及其应用姓名:学号:导师:目录第一章模糊PID控制简介....................................................................... 错误!未定义书签。
1.1传统PID ........................................................................................... 错误!未定义书签。
1.2模糊PID ........................................................................................... 错误!未定义书签。
第二章直流伺服电机简介 ...................................................................... 错误!未定义书签。
2.1电动机调速控制原理 ...................................................................... 错误!未定义书签。
2.2三环控制原理 .................................................................................. 错误!未定义书签。
2.3电动机模型的建立 .......................................................................... 错误!未定义书签。
第三章模糊控制器设计 .......................................................................... 错误!未定义书签。
模糊控制与PID控制的比较
模糊控制与PID控制的比较自20世纪60年代中期起,模糊控制逐渐崭露头角,其优越性也引起了人们的关注。
除了模糊控制,当今热门的控制算法之一是PID控制。
那么,模糊控制与PID控制之间的区别是什么呢?它们各自的优缺点是什么?在特定的应用场合下,哪种控制算法更适用?一、模糊控制概述模糊控制是一种无需准确模型或参数即可执行复杂控制系统的方法,它仅使用模糊逻辑来描述输入和输出之间的关系。
模糊控制系统的输入和输出都是模糊变量。
与其他控制方法相比,模糊控制系统可以更好地处理不确定性和模糊性,具有更强的容错能力和适应性。
模糊控制系统由四个主要组成部分组成:模糊化、模糊推理、解模糊化和规则库。
模糊化部分将传感器输出信号转换为模糊变量,模糊推理部分使用模糊逻辑基于模糊规则将模糊变量转换为控制信号,解模糊化部分将控制信号转换为精确的控制信号,规则库存储了模糊规则及其权重。
二、PID控制概述比例积分微分(PID)控制是一种经典的控制算法,其控制草图由三个部分组成。
比例项(P)根据当前误差大小进行输出,积分项(I)可以消除稳态误差,微分项(D)可以提高系统的稳定性并抑制系统的震荡。
PID控制器的设计基于系统的数学模型,在许多应用中,这个模型是已知的。
在这些情况下,PID控制器可以通过调整不同部分的增益以进行优化。
三、模糊控制与PID控制的对比1. 精度PID控制器可以实现非常高的精度,特别是在恒定环境下,模糊控制器具有更高的容错能力和适应性,而且围绕控制正常的范围内快速做出反应。
2. 调节PID调节通常是更容易实现的PLC控制器中自动化开发环境的系统。
Fuzzy可能更多地需要手动调整和对规则进行逐步精细的训练,但它也可以被训练自动化。
3. 适应性模糊控制器的好处是可以轻松地处理不确定性和模糊性,因此可以应对复杂环境。
PID控制器则对不确定性和模糊性更加敏感,而且会因不确定性的变化而导致过度响应或不足响应的问题。
4. 实际应用PID控制器广泛应用于许多领域,如化工、制造和机械工程。
(完整版)智能控制-考试题(附答案)
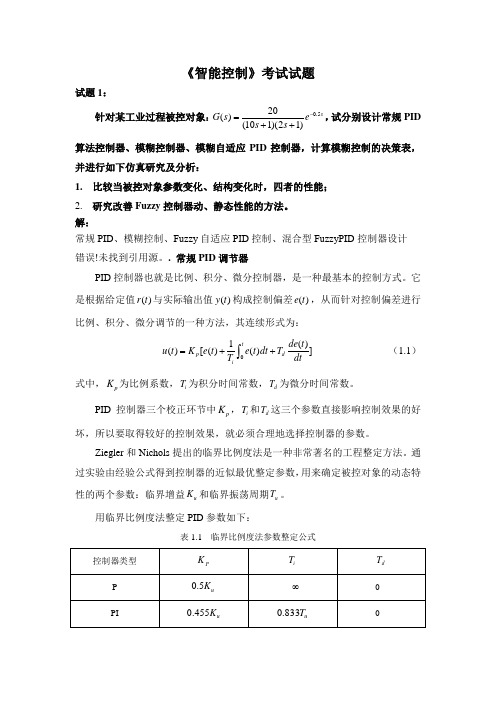
《智能控制》考试试题试题1:针对某工业过程被控对象:0.520()(101)(21)s G s e s s -=++,试分别设计常规PID 算法控制器、模糊控制器、模糊自适应PID 控制器,计算模糊控制的决策表,并进行如下仿真研究及分析:1. 比较当被控对象参数变化、结构变化时,四者的性能;2. 研究改善Fuzzy 控制器动、静态性能的方法。
解:常规PID 、模糊控制、Fuzzy 自适应PID 控制、混合型FuzzyPID 控制器设计 错误!未找到引用源。
. 常规PID 调节器PID 控制器也就是比例、积分、微分控制器,是一种最基本的控制方式。
它是根据给定值()r t 与实际输出值()y t 构成控制偏差()e t ,从而针对控制偏差进行比例、积分、微分调节的一种方法,其连续形式为:01()()[()()]t p d i de t u t K e t e t dt T T dt=++⎰ (1.1) 式中,p K 为比例系数,i T 为积分时间常数,d T 为微分时间常数。
PID 控制器三个校正环节中p K ,i T 和d T 这三个参数直接影响控制效果的好坏,所以要取得较好的控制效果,就必须合理地选择控制器的参数。
Ziegler 和Nichols 提出的临界比例度法是一种非常著名的工程整定方法。
通过实验由经验公式得到控制器的近似最优整定参数,用来确定被控对象的动态特性的两个参数:临界增益u K 和临界振荡周期u T 。
用临界比例度法整定PID 参数如下:表1.1 临界比例度法参数整定公式51015202530354000.20.40.60.811.21.41.61.8Time(s)y (t )051015202530354000.511.5Time(s)y (t )PID 0.6u K 0.5u T 0.125u T据以上分析,通过多次整定,当 1.168p K =时系统出现等幅振荡,从而临界增益 1.168u K =,再从等幅振荡曲线中近似的测量出临界振荡周期 5.384u T =,最后再根据表1.1中的PID 参数整定公式求出:0.701, 2.692,0.673p i d K T T ===,从而求得:比例系数0.701p K =,积分系数/0.260i p i K K T ==,微分系数0.472d p d K K T ==。
模糊控制与传统PID控制比较

模糊控制与传统PID控制比较引言:模糊控制不需要确定系统的精确数学模型,是一种基于规则的控制。
模糊控制在智能控制领域由于理论研究比较成熟、实现相对比较简单、适应面宽而得到广泛的应用。
不论是对复杂的水泥回转窑的控制,还是在智能化家用电器中的应用,模糊控制都充当着重要的角色。
一个典型工业过程通常可以等效为二阶系统加上一个非线性环节(如纯滞后),给出如下典型控制对象传递函数的一般形式:Gp(s)=K*e-τs/(T1s+1)(T2s+1)PID控制:PID控制是自动控制领域产生最早、应用最广的一种控制方法。
PID控制原理图:PID控制器传递函数的一般表达式为:Gc(s)=kp+ki/s+kd*skp为比例增益;ki为积分增益;kd为微分增益控制器的关键是确定三个增益值,在simulink中搭建PID 系统控制模型如下图示:PID仿真结果:模糊控制:模糊控制是运用语言归纳操作人员的控制策略,运用变量和模糊集合理论形成控制算法的一种控制。
模糊控制原理框图:一个基本模糊控制器主要有三个功能:(1)模糊化:把精确量(如偏差e和偏差变化ec)转化为相应的模糊量(E、EC);(2)模糊推理:按总结的语言规则(模糊控制规则表)进行模糊推理;(3)模糊判决:把推理结果(U)从模糊量转化为可以用于实际控制的精确量(u)模糊控制器的基本机构设计模糊控制器主要步骤:1.选择偏差e、偏差变化ec和控制量u的模糊语言变量为E、EC和U。
根据e、ec和u实际的基本论域,设定E、EC和U论域都为[-6,6],可以确定出量化因子Ke、Kc和比例因子Ku。
2.选取E、EC和U的各语言变量直,正大PB,正中PM,正小PS,零ZE,负小NS,负中NM,负大NB,它们各自在论域上的模糊子集隶属度函数均为三角形,3.根据总结的人工操作策略设计出模糊控制策略表:ek=yr-yk △ek=ek-ek-1模糊规则:3.选择一种模糊判决方法,将控制量由模糊量变为精确量,这个过程叫做“去模糊化”,这里采用“面积平分法”仿真结果:总结:设给定r为单位阶跃输入,通过改变控制对象象的参数,在同一坐标内观察它们的输出y响应曲线对两种控制方案的性能进行对比分析,模糊控制器比PID控制器,动态性能很好,上升速度快,基本没有超调。
模糊控制程序设计报告
模糊控制程序设计报告自研112班 麻世博 2201100387题目:已知被控对象为0.51()101s G s e s −=+。
假设系统给定为阶跃值r =30,采样时间为0.5s ,系统的初始值r(0)=0。
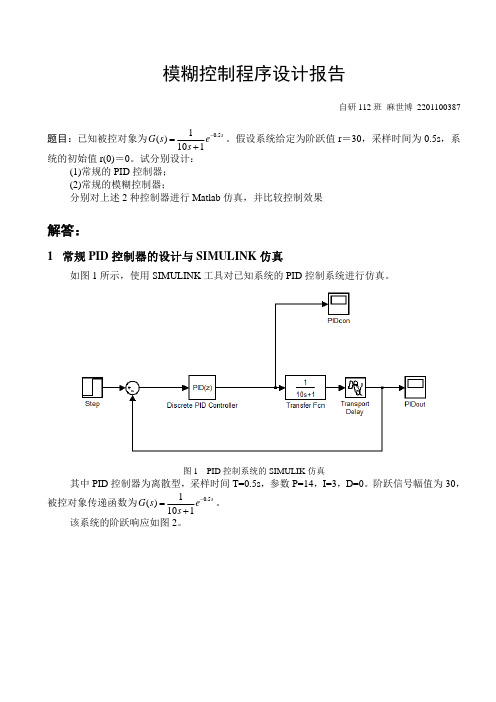
试分别设计:(1)常规的PID 控制器;(2)常规的模糊控制器;分别对上述2种控制器进行Matlab 仿真,并比较控制效果解答:1 常规PID 控制器的设计与SIMULINK 仿真如图1所示,使用SIMULINK 工具对已知系统的PID 控制系统进行仿真。
图1 PID 控制系统的SIMULIK 仿真其中PID 控制器为离散型,采样时间T=0.5s ,参数P=14,I=3,D=0。
阶跃信号幅值为30,被控对象传递函数为0.51()101s G s e s −=+。
该系统的阶跃响应如图2。
图2 PID控制系统的输出该控制系统上升时间T r=1.5s,调节时间T s=8s,超调量σ%=70%,没有稳态误差。
该系统中PID控制器的输出曲线如图3。
图3 PID控制器的输出曲线输出最大值为465,最小值为-208。
2 模糊控制器的设计在本文中,我通过MATLAB提供的模糊逻辑工具箱(Fuzzy Logic Toolbox)编辑隶属函数、控制规则,设计了一个双输入单输出的模糊控制器,如下图所示。
图4 模糊控制器概览2.1 隶属度函数的确立。
选择偏差E和偏差变化率EC作为控制器的输入,控制量U为输出。
取E、EC和U的模糊子集为{NB, NM, NS, ZO, PS, PM, PL} ,它们的论域为{-3, -2, -1, 0, 1, 2, 3}。
在 MATLAB的命令窗口输入命令Fuzzy,进入模糊逻辑编辑窗口。
取输入量E、EC的隶属函数为高斯型(gaussmf),输出U的隶属函数为三角形(trimf),如下图所示。
图5 输入模糊变量E的隶属度函数图6 输入模糊变量EC的隶属度函数图7 输出模糊变量U的隶属度函数2.2 模糊控制规则与决策方法的确立。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上机实验已知系统的传递函数为G(S)=1/(10S+1)e-0.5s。
假设系统给定为阶跃值r=30,系统的初始值r(0)=0试分别设计常规PID控制器和模糊控制器。
常规PID控制器的设计:
利用Ziegler-Nichols整定公式整定PID调节器的初始参数
由公式可得
P=18
Ti=1.65
Td=0
SIMULINK仿真图
设定仿真时间为10s
仿真结果
模糊控制器的设定
1 在matlab命令窗口输入“fuzzy”确定模糊控制器结构:即根据具体的系统确定输入、输出量。
选取二维控制结构,即输入为误差e和误差变化ec,输出为u如下图所示
2 输入输出变量的模糊化:即把输入输出的精确量转化为对应语言变量的模糊集合。
首先我们要确定描述输入输出变量语言值的模糊子集,如{NB,NM,NS,ZO,PS,PM,PB},并设置输入输出变量的论域,然后我们为模糊语言变量选取相应的隶属度函数。
如下图所示
3 模糊推理决策算法设计:即根据模糊控制规则进行模糊推理,并决策出模糊输出量。
首先要确定模糊规则,即专家经验。
如图。
制定完之后,会形成一个模糊控制规则矩阵,然后根据模糊输入量按照相应的模糊推理算法完成计算,并决策出模糊输出量。
4.对输出模糊量的解模糊:模糊控制器的输出量是一个模糊集合,通过反模糊化方法判决出一个确切的精确量,反模糊化方法很多,我们这里选取重心法。
SIMULINK仿真图
在模糊控制器的输入和输出均有一个比例系数,我们叫它量化因子,它反映的是模
糊论域范围与实际范围之间的比例关系,这里模糊控制器输入的论域范围均为[-6,6],假设误差的范围是[-10,10],误差变化率范围是[-100,100],控制量的范围是[-24,24],那么我们就可以算出量化因子分别为0.6,0.06,8。
量化因子的选取对于模糊控制器的控制效果有很大的影响,当输出量化因子调为10控制效果更好。
仿真曲线
常规PID控制器和模糊控制器的比较
由仿真结果可见两种控制器对系统的各项性能指标都有了改进,常规PID还是有超调量,模糊控制器的超调量几乎为零。