CC3D 安装设定
CC3D 安装设定

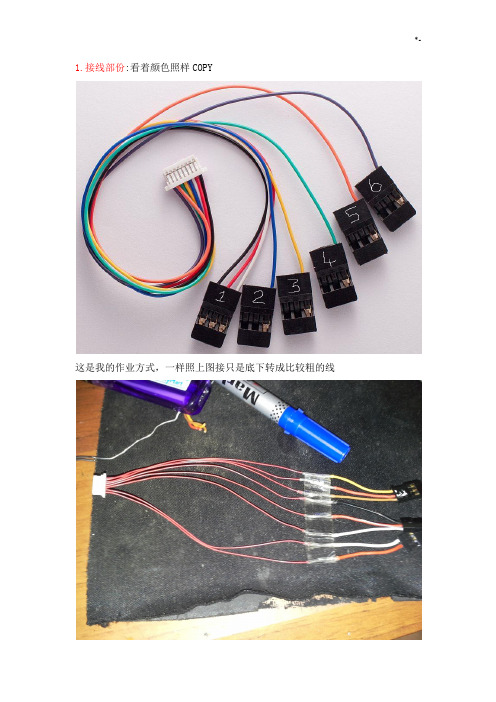
1.接线部份:看着颜色照样COPY这是我的作业方式,一样照上图接只是底下转成比较粗的线接在遥控器上指定要启动哪些开关惟动开关,所以按照接收机123456顺序给他接下去上面硬件算完成PS.直接接上USB电压会不足无法推动接收机,直接接上动力电池供电就行了2.系统部份,我使用WIN7 64 在软体上多做了一些动作,如果不是可以跳过这步骤软体安装完>>捷径右键内容>相容性>以相容模是执行这个程式3.软体安装:放在群共享里解完压缩后>>下一步>下一步>下一步........就安装完成了4.软体设置:下一步:NEXT此时不要接上USB接上的情况是无法下载更新挡案等下载完过这画面在接上USB 这时出现通讯连接阜,这时在接上USB线通讯连接成功,下一步选择接收机类型:我用RX1002的接收机所以选择PWM,,下一步旋翼类型>>下一步这是旋翼类型,四旋翼选Quadcopter X,注意图面上的电机安装顺序选择 Turbo PWM,下一步设置讯习显示,下一步水平校准,把飞机放在一个平坦的地方按Calculate下一步要调整电机转动的最低值,卸下所有的桨,接上动力电池后,下一步这图说明一号电机,按START,拉动光条至电机能转动,我调整到按STOP与START 这两者之间的切换会启动与停止四个电机最低起动点调整完后选择SAVE,再来是遥控器设定,点遥控器图样选择NEXT在NEXT,有时画面会上滚动看不到NEXT往下拉就看到了acl跳回这画面。
这时会出现动态图照图做动态图试到8个通道但我们接上六个线的通道所以accessory1 accessory2我没做值接点下一步这图是叫你摇杆全部回中,下一步再来是取得所有摇杆的舵量这部份如打杆与图面上相反上面四个选项打勾就会变成相反,也能从要控器上设置这画面是定意想要如何解锁我是选ROLL LEFT (副翼左)可随自己解锁习管选择底下那是选择想要给飞控多长时间上锁,全部设定完后右下角有SAVE存挡没存档是解不了锁,这部份一定要设定在接上动力电池情况解锁推油门电机因该会转动点选rcinput这部份可以指定飞机上的接线要对应哪些通道基本的四个Throttle(油门)Roll(副翼)Pitch (升降)Yaw(方向)其它的还没玩到等有玩到在讲解。
CC3D进阶设置教程

CC3D进阶设置教程By小T本教程默认你已经做好诸如遥控校准,通道设置等基础设置。
并且本设置教程只适用于多轴模式。
1、飞行模式开关设置三个平衡模式建议直接设置用三个不同的bank,方便相同模式切换不同的感度。
建议前两个采用姿态模式(Attitude),第三个采用手动模式(Rate)或者半自动模式(Rattitude)。
方向(Yaw)都采用轴锁定(Axislock)模式(方向也可以用Rate,千万不要用Attitude!)。
鉴于推力(Thrust)基本只能用巡航控制(CruiseControl),其他要不会出现配置错误,要不出现飞行不稳定。
下面介绍下Rattitude模式。
据官方wiki介绍,一旦你尝试这个模式,你就不会选择其他模式。
这个是一个适合你第一次做空翻的一种模式!这种模式在中点附近是自稳模式,一旦打到底(或者你设置的程度)就会变成Rate模式。
据官方介绍,这个模式只有在Pitch和Roll都设置为Rattitude模式时才有意义,如果Yaw也设置了Rattitude模式,那么会自动被Rate模式替代。
如果设置这个模式,那么注意感度调节那块,都得调节!然后注意下面这个地方:这个地方是是设置摇杆打到什么程度时候,从Attitude向Rate模式切换,注意不能过小,不然非常危险,摇杆稍微打一点点,就有可能引起翻滚。
但是也不能过大,如果超过100,则不能翻滚,也就是说变成了Attitude模式。
2、基础模式设置下面开始设置三个bank(我的参数只是示意!)。
前两个自稳模式主要看第一个滑块,感度调节的不同!(注意上面一个是PID bank1,一个是PID bank2。
滑块越往左,感度越低。
)第三个由于设置的Rate模式,所以主要看第二个滑块!如果方向模式用的Rate模式的话,注意调节第三个滑块的感度。
高手的话一般将感度值调节到绿色(活泼的)框范围内。
新手建议不要超出蓝色(适度的)范围。
上面基本设置设置完成后基本已经可以飞的比较好了。
3D打印机安装手册
---Mojo,uPrint
Mojo
一、安装注意事项
1 连接系统
确保完成下列物理现场准备工作: • 为避免发生掉落,系统必须放置在能够承受 34.1 千克重量的稳 固平面上。 • 用于打开系统包装的工作区域应为高 1.22 米、宽 1.83 米、深 1.02 米。 • 接地电源插座(6 安(交流 100–127 伏)或 2.5 安(交流 220-240 伏) 50/60 赫兹600 瓦)必须连接到所提供的欧式或 美式电源线插头,并且必须距离系统2米内。不要使用延长线或 接线板。否则,可能会导致间歇性电源问题。 • 操作环境温度必须介于 15 °C 到 30 °C (59 °F 到 86 °F) 之间。 • 操作环境湿度必须介于 20% 到 80% 的相对湿度之间(无冷凝)。
Mojo 3D Printer Software 1. 从启动套件中找到 3D Printer Software CD,将其插入主机的 CD 驱动 器中。 2. 按照提示在主机上加载 3D Printer Software。 3. 加载软件可能需要几分钟时间。 注意:在软件安装过程中收到连接 USB 电缆的提示后,在打印机背面 的 USB电缆连接器和主机之间连接 USB 电缆。 注意:切勿将 USB 电缆插入标有 的端口或 USB 3.0 端口。
⑥ 更新IP地址: • 按“增加”,每次将值提高一个数。 • 按“下一位数”将光标向右移动一个位置。 • 按“上一位数”将光标向左移动一个位置。 ⑦ 使用上面列出的三项功能设置IP地址。
⑧ 设置了Internet协议(IP)地址的最后一位数后,将光标向右再移动一个位 置。此时光标移动到子网掩码(NM)地址。按照上述步骤设置NM地址和网关 (GW)地址。 ⑨ 完成地址的设置后,在显示面板中按“完成” 。显示屏会显示:“是否 更改 IP、子网掩码和网关? (Change IP, Netmask and Байду номын сангаасateway?)” ⑩ 按“是”。然后,面板将显示“正在重新设置网络”。 11 按“完成”,直至显示“空闲”。 ○
3ds max安装教程

3ds max安装教程3ds Max是一款功能强大的三维建模和动画软件,广泛应用于游戏、电影、建筑和设计等领域。
下面是一个关于3ds Max安装的简单教程,希望能帮助到你。
1. 确认系统要求在安装3ds Max之前,首先要确保你的计算机符合系统要求。
3ds Max要求操作系统为Windows 7、Windows 8或Windows 10,并且需要64位处理器。
此外,你还需要至少4GB的内存和8GB的可用硬盘空间。
2. 下载安装程序你可以从Autodesk官方网站上下载3ds Max的安装程序。
打开Autodesk网站,找到并选择3ds Max软件,然后点击下载按钮。
在下载过程中,你可能需要提供一些个人信息。
3. 运行安装程序下载完成后,双击安装程序,然后选择“运行”以启动安装过程。
在安装向导中,你将看到许可协议,请仔细阅读并接受它。
4. 选择安装类型在安装类型页面上,你可以选择安装3ds Max的完整版本,或者只选择安装部分功能。
如果你对3ds Max还不太熟悉,建议选择完整版本,这样可以体验到所有的功能。
5. 选择安装位置接下来,你需要选择3ds Max的安装位置。
你可以选择默认位置,也可以选择一个自定义位置。
请确保你选择的磁盘有足够的空间来安装3ds Max。
6. 安装组件和内容在这一步中,你可以选择额外的组件和内容来安装。
这些组件和内容可以帮助你更好地使用3ds Max。
可以根据自己的需求选择需要安装的组件和内容。
7. 开始安装在确认所有选项后,点击“安装”按钮开始安装3ds Max。
这个过程可能需要一段时间,请耐心等待。
8. 激活许可证安装完成后,你需要激活3ds Max的许可证。
打开3ds Max,你将看到一个许可证激活对话框。
选择许可证类型,然后按照提示完成激活过程。
9. 启动并配置3ds Max现在,你可以双击桌面上的3ds Max图标来启动程序。
在第一次启动时,你可能需要进行一些初始配置,例如选择界面样式、设置工作目录等。
TCM集成C3D的配置及应用
产品数据管理系统项目实施过程质量控制文档TCM与C3D集成的配置及应用用户:作者签名:日期:审核签名:日期:目录1前言 (3)2选项配置 (3)3导出BOP结构至PLMXML (3)4设置映射规则 (5)5创建C3D ITEM TYPE (17)6设置工艺类型 (19)7导入数据 (20)8装配动画制作 (21)1前言本文主要介绍的是TCM与C3D集成的配置及应用过程。
C3D的安装、TC集成C3D的基础模块的安装作为基本功能,本文中不做具体说明,可参考C3D的安装资料。
2选项配置3导出BOP结构至PLMXML在TC中需要将装配工艺和目标产品关联,并且需要创建协同关联,将装配工艺和目标产品关联到协同关联中。
选择协同关联导出,可以同时导出产品BOM结构、工艺结构的信息。
协同关联可以在制造工艺规划器中通过另存的方式创建。
选择协同关联,点击【工具】—【导出】—【到PLMXML】选择导出目录、传递模式、版本规则,然后确定导出关闭导出日志4设置映射规则启动RapidConfigration,选择新建Profile输入Profile文件名称呢个,选择类型为PLMXML,点击【OK】选择specification的类型和语言,对应与装配工艺需要选择Rapid Work Instructions(procedure)导入PLMXML数据,点击【Load…】选择从TC中导出的PLMXML文件,点击【打开】选择Metadata,点击【Generate rules for all metadata】生成默认的规则点击【是】选择Procedure,勾选【Generate procedure】设置工艺、工序名称与动画步骤名称对应,在Steps部分,点击【New…】弹出Metadata Rule窗口,点击【Add Metadata】选择【ProcessRevision/attr/name】,点击【OK】勾选【Step name】,点击【OK】同样的方式,再次点击【New…】,点击【Add Metadata】,选择【Operation/attr/name】,点击【OK】勾选【Step name】,点击【OK】设置事例类型的对象的处理动画动作,在Actions部分,点击【Select…】选择【Occurrence/attr/subType】,点击【OK】点击【Action mapping rules】部分点击【New…】选择源动作类型为【MEConsumed】,点击【Regular action】,选择Function动画为Makevisible –Flash,点击【OK】,这部分可根据实际的需要设置。
250整机组装说明书(接收机连接.CC3D安装,电机校准,遥控器配置)概论

250整机组装(接收机连接.CC3D安装,电机校准,遥控器配置)连接遥控器这部分的难度,主要是管脚的确定,关键是供电管脚,其他管脚可以随便接入的,后期可以在软件设置的时候进行更改调整。
CC3D与遥控器相关的管脚信息如下表:CC3D软件调试注意,到这一步的时候,还不能安装螺旋桨,主要是为了安全。
地面站的安装目前随着最新的OpenPilot Revolution(CC3D REVO)的发布,OpenPilot GCS软件对于早期的CC3D芯片的支持是到15.02.02版本,最新的版本15.05.02貌似只支持CC3D REVO 。
早期版本用户请点击这里下载 OpenPilot 15.02.02CC3D REVO 用户请点击下载 OpenPilot 15.05.02默认安装,一路Next即可。
安装最后窗口弹出提示安装驱动,点击确认安装即可。
安装驱动程序之后用数据线将CC3D与电脑连接,有可能你的电脑会提示该驱动安装未成功,在设备管理器里COM端口有出现但是Copter Control黄色感叹号标识,如下图所示。
这个时候,其实上位机和CC3D飞控已经可以正常通信。
•CC3D向导配置进入地面站,首先查看端口通信是否连接,点击Vehicle Setup Wizard进入向导配置界面如图所示。
CC3D飞控使用mini USB接口和上位机相连进入设置向导后,会出现红色标识,上位机非常人性的提示在配置之前卸掉桨叶,以防意外发生。
Next进入下一界面,固件升级界面,提示你需要将固件版本与地面站版本保持一致,初次配置,建议Upgrade升级固件。
升级固件步骤:断开航模电池,拔掉USB线,保证CC3D飞控已经完全断电,没有LED亮起点击Upgrade按钮根据进度条上的提示,待进度条走动时迅速插上USB数据线,地面站将自动写入最新固件。
飞控写入最新固件后,Next进入遥控接收器的配置,有PWM/PPM/Futaba/Spektrum四种可选。
Corel 3D安装

第1栏——Program(程序,节目单),是Corel公司各个不同软件版本的选单。
注意:Corel 3D在该选单的倒数第3个,鼠标点开下拉选单,选择最下倒数第3个。
即:Corel MotionStudio 3D v1.0 。
第2栏——Installation Code(安装代码),这里将粘贴从软件安装界面复制来的安装代码。
(2).运行(双击)3D安装文件Setup.exe 。进入安装界面。
(3).弹出安装窗口,选“我接受授权合约的条款内容(A)”,
再点击右下角的“下一步”按钮。
(4).这时,窗口变成安装设置界面,选中国,并修改安装路径。
将原路径:
C:\Program Files\Corel\Corel MotionStudio 3D 1.0\
才能进行3D的安装。
当然了,用微软的英文版的清理工具,
是可以清理干净而不用重新安装系统的。
最好一次安装成功,否则就麻烦了。
3.安装步骤:
(1).打开D\Guaxue\3D\繁体中文Corel MotionStudio_3D_1.0 文件夹。
找到其中16个对象中的3D安装文件Setup.exe 。
6.接着,窗口变成“飞画-Studio 3D-汉化补丁-12-06-18 已成功安装”的界面。
鼠标单击右下的“完成”按钮。
这时,桌面又多了一个3D图标:
飞画简体中文Corel MotionStudio 3D 。
这个图标也能启动3D程序。
桌面上2个3D图标都能启动3D程序,我们删除一个,只留下一个图标好了。
解压的繁体中文3D软件的文件夹里,有16个对象。
CC3D安装设定说明介绍
1.接线部份:看着颜色照样COPY这是我的作业方式,一样照上图接只是底下转成比较粗的线用RX1002接收机来演示接法就1.2.3.4.依序接跳过GEAR 接5.6在遥控器上指定要启动哪些开关图面上的1.2.3.4.5.6可以在软体中指定,俯仰,副翼,油门,方向,两个惟动开关,所以按照接收机123456顺序给他接下去上面硬件算完成PS.直接接上USB电压会不足无法推动接收机,直接接上动力电池供电就行了2.系统部份,我使用WIN7 64 在软体上多做了一些动作,如果不是可以跳过这步骤软体安装完>>捷径右键内容>相容性>以相容模是执行这个程式3.软体安装:放在群共享里OpenPilot-RELEASE-13.06.02-win32解完压缩后>>下一步>下一步>下一步........就安装完成了4.软体设置:下一步:NEXT此时不要接上USB接上的情况是无法下载更新挡案等下载完过这画面在接上USB这时出现通讯连接阜,这时在接上USB线通讯连接成功,下一步选择接收机类型:我用RX1002的接收机所以选择PWM,,下一步旋翼类型>>下一步这是旋翼类型,四旋翼选Quadcopter X,注意图面上的电机安装顺序选择 Turbo PWM,下一步设置讯习显示,下一步水平校准,把飞机放在一个平坦的地方按Calculate下一步要调整电机转动的最低值,卸下所有的桨,接上动力电池后,下一步这图说明一号电机,按START,拉动光条至电机能转动,我调整到按STOP与START 这两者之间的切换会启动与停止四个电机最低起动点调整完后选择SAVE,再来是遥控器设定,点遥控器图样选择NEXT在NEXT,有时画面会上滚动看不到NEXT往下拉就看到了第二个是美国手,1.3.4选项自己试试看点选下一步有动态图,错了再点B acl跳回这画面。
这时会出现动态图照图做动态图试到8个通道但我们接上六个线的通道所以accessory1 accessory2我没做值接点下一步这图是叫你摇杆全部回中,下一步再来是取得所有摇杆的舵量这部份如打杆与图面上相反上面四个选项打勾就会变成相反,也能从要控器上设置这画面是定意想要如何解锁我是选ROLL LEFT (副翼左)可随自己解锁习管选择底下那是选择想要给飞控多长时间上锁,全部设定完后右下角有SAVE存擋没存檔是解不了锁,这部份一定要设定在接上动力电池情况解锁推油门电机因该会转动点选rcinput这部份可以指定飞机上的接线要对应哪些通道*- 基本的四个Throttle(油门)Roll(副翼)Pitch (升降)Yaw(方向)其它的还没玩到等有玩到在讲解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.接线部份:看着颜色照样COPY
这是我的作业方式,一样照上图接只是底下转成比较粗的线
接5.6在遥控器上指定要启动哪些开关
惟动开关,所以按照接收机123456顺序给他接下去
上面硬件算完成
PS.直接接上USB电压会不足无法推动接收机,直接接上动力电池供电就行了2.系统部份,我使用WIN7 64 在软体上多做了一些动作,如果不是可以跳过这步骤
软体安装完>>捷径右键内容>相容性>以相容模是执行这个程式
3.软体安装:放在群共享里
解完压缩后>>下一步>下一步>下一步........
就安装完成了
4.软体设置:
下一步:NEXT
此时不要接上USB接上的情况是无法下载更新挡案等下载完过这画面在接上USB
这时出现通讯连接阜,这时在接上USB线
通讯连接成功,下一步
选择接收机类型:我用RX1002的接收机所以选择PWM,,下一步
旋翼类型>>下一步
这是旋翼类型,四旋翼选Quadcopter X,注意图面上的电机安装顺序
选择Turbo PWM,下一步
设置讯习显示,下一步
水平校准,把飞机放在一个平坦的地方按Calculate
下一步
要调整电机转动的最低值,卸下所有的桨,接上动力电池后,下一步
这图说明一号电机,按START,拉动光条至电机能转动,我调整到按STOP与START
这两者之间的切换会启动与停止
四个电机最低起动点调整完后选择SA VE,
再来是遥控器设定,点遥控器图样
选择NEXT
在NEXT,有时画面会上滚动看不到NEXT往下拉就看到了
acl跳回这画面。
这时会出现动态图照图做
动态图试到8个通道但我们接上六个线的通道所以accessory1 accessory2我没做值接点下一步
这图是叫你摇杆全部回中,下一步
再来是取得所有摇杆的舵量
这部份如打杆与图面上相反上面四个选项打勾就会变成相反,也能从要控器上设置
这画面是定意想要如何解锁
我是选ROLL LEFT (副翼左)可随自己解锁习管选择
底下那是选择想要给飞控多长时间上锁,全部设定完后右下角有SA VE存挡
没存档是解不了锁,这部份一定要设定
在接上动力电池情况解锁推油门电机因该会转动
点选rcinput这部份可以指定飞机上的接线要对应哪些通道
基本的四个
Throttle(油门)
Roll(副翼)
Pitch (升降)
Yaw(方向)
其它的还没玩到等有玩到在讲解。