STM32Cube学习之八:输入捕获
STM32PWM输入捕获模式源码

STM32PWM输入捕获模式源码void TIM5_Configuration(void){GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_ICInitTypeDef TIM_ICInitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE); //时钟配置RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;//GPIO配置GPIO_InitStructure.GPIO_Mode =GPIO_Mode_IN_FLOATING;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);TIM_TimeBaseStructure.TIM_Period = 60000; //周期0~FFFFTIM_TimeBaseStructure.TIM_Prescaler = 22; //时钟分频,分频数为5+1即6分频TIM_TimeBaseStructure.TIM_ClockDivision = 0; //时钟分割TIM_TimeBaseStructure.TIM_CounterMode =TIM_CounterMode_Up;//模式TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);//基本初始化NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn;//NVIC配置NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;//通道选择TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿触发TIM_ICInitStructure.TIM_ICSelection =TIM_ICSelection_DirectTI; //管脚与寄存器对应关系TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //输入预分频。
STM32输入捕获模式
STM32输入捕获模式
在输入捕获模式下,定时器将统计外部信号的上升沿或下降沿出现的
时间,并将统计结果保存在相关的寄存器中。
用户可以根据需要选择统计
上升沿还是下降沿,并可以选择计数溢出时是否复位计数器。
1.选择定时器和通道:根据实际需求选择合适的定时器和通道。
一般
来说,每个定时器都有多个通道可以配置为输入捕获模式。
2.配置定时器:根据测量的要求配置定时器的工作模式、计数方向和
预分频系数等。
定时器的配置将影响捕获的精度和测量范围。
3.配置输入捕获:选择捕获触发源,可以选择外部信号引脚或其他定
时器的输出作为触发源。
配置捕获触发源时还可以选择捕获的边沿类型
(上升沿或下降沿)和是否复位计数器。
4.开启定时器:配置完成后,通过使能相关的定时器和通道将输入捕
获模式启用。
5.捕获外部信号:当捕获触发源产生触发信号时,定时器将开始计数,当捕获到外部信号的边沿时,定时器会自动将计数值保存在指定的寄存器中。
6.读取测量结果:根据所选择的定时器和通道,从相关的寄存器中读
取测量结果,可以通过计算得到所需的参数,比如周期、脉宽等。
输入捕获模式在很多应用中都是非常常见且重要的。
例如在测量旋转
编码器的位置和速度时,可以使用输入捕获模式来捕获编码器的A相和B
相信号,并通过计算来确定位置和速度。
此外,输入捕获模式还可以用于
测量外部信号的频率、测量脉冲信号的宽度等。
总之,STM32输入捕获模式是一种功能强大且灵活的功能,能够帮助用户实现对外部信号的精确测量和控制。
通过合理配置和使用,可以满足各种不同的应用需求。
理解STM32定时器中的输入捕获滤波器
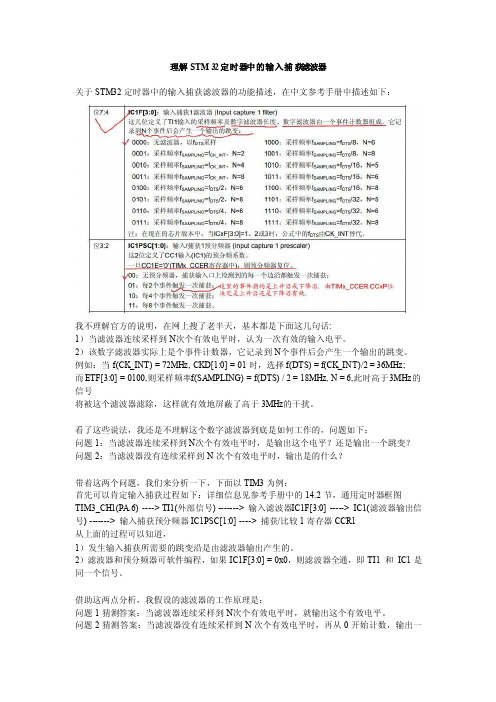
理解STM32定时器中的输入捕获滤波器关于STM32定时器中的输入捕获滤波器的功能描述,在中文参考手册中描述如下:我不理解官方的说明,在网上搜了老半天,基本都是下面这几句话:1)当滤波器连续采样到N次个有效电平时,认为一次有效的输入电平。
2)该数字滤波器实际上是个事件计数器,它记录到N个事件后会产生一个输出的跳变。
例如:当f(CK_INT) = 72MHz, CKD[1:0] = 01时,选择f(DTS) = f(CK_INT)/2 = 36MHz;而ETF[3:0] = 0100,则采样频率f(SAMPLI NG) = f(DTS) / 2 = 18MHz, N = 6,此时高于3M Hz的信号将被这个滤波器滤除,这样就有效地屏蔽了高于3MHz的干扰。
看了这些说法,我还是不理解这个数字滤波器到底是如何工作的,问题如下:问题1:当滤波器连续采样到N次个有效电平时,是输出这个电平?还是输出一个跳变?问题2:当滤波器没有连续采样到N次个有效电平时,输出是的什么?带着这两个问题,我们来分析一下,下面以TIM3为例:首先可以肯定输入捕获过程如下:详细信息见参考手册中的14.2节,通用定时器框图TIM3_C H1(PA.6) ----> TI1(外部信号) -------> 输入滤波器I C1F[3:0] -----> IC1(滤波器输出信号) -------> 输入捕获预分频器IC1PSC[1:0] ----> 捕获/比较1寄存器CCR1从上面的过程可以知道,1)发生输入捕获所需要的跳变沿是由滤波器输出产生的。
2)滤波器和预分频器可软件编程,如果IC1F[3:0] = 0x0,则滤波器全通,即TI1 和IC1是同一个信号。
PWM输入捕获学习笔记
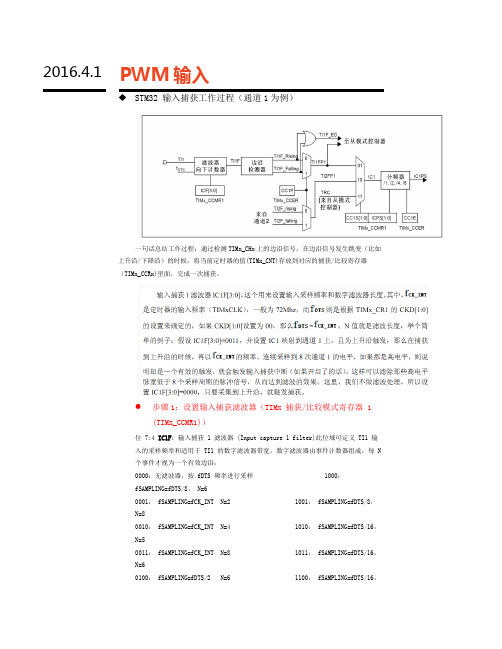
2016.4.17PWM 输入 ◆ STM32 输入捕获工作过程(通道1为例)一句话总结工作过程:通过检测TIMx_CHx 上的边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定时器的值(TIMx_CNT)存放到对应的捕获/比较寄存器(TIMx_CCRx)里面,完成一次捕获。
● 步骤1:设置输入捕获滤波器(TIMx 捕获/比较模式寄存器 1 (TIMx_CCMR1))位 7:4 IC1F :输入捕获 1 滤波器 (Input capture 1 filter)此位域可定义 TI1 输入的采样频率和适用于 TI1 的数字滤波器带宽。
数字滤波器由事件计数器组成,每 N 个事件才视为一个有效边沿:0000:无滤波器,按 fDTS 频率进行采样1000:fSAMPLING=fDTS/8, N=60001: fSAMPLING=fCK_INTN=21001: fSAMPLING=fDTS/8, N=80010: fSAMPLING=fCK_INTN=41010: fSAMPLING=fDTS/16, N=50011: fSAMPLING=fCK_INTN=81011: fSAMPLING=fDTS/16, N=60100: fSAMPLING=fDTS/2N=61100:fSAMPLING=fDTS/16,N=80101: fSAMPLING=fDTS/2N=8 1101: fSAMPLING=fDTS/32,N=50110: fSAMPLING=fDTS/4N=6 1110: fSAMPLING=fDTS/32, N=6 0111: fSAMPLING=fDTS/4N=8 1111: fSAMPLING=fDTS/32, N=8注意:在当前硅版本中,当ICxF[3:0]= 1、 2 或 3 时,将用CK_INT 代替公式中的f DTS。
●步骤2:设置输入捕获极性 (TIMx 捕获/比较使能寄存器(TIMx_CCER))CC1 通道配置为输出:0: OC1 高电平有效1: OC1 低电平有效CC1 通道配置为输入:该位选择是IC1还是IC1的反相信号作为触发或捕获信号00:非反相/上升沿触发10:保留,不使用此配置。
STM32输入捕获的脉冲宽度及频率计算

STM32输入捕获的脉冲宽度及频率计算脉冲宽度的计算:脉冲宽度是指脉冲信号的高电平或低电平持续的时间。
在STM32中,定时器的输入捕获模式可以测量脉冲宽度。
输入捕获模式下,定时器会记录脉冲边沿的时间戳,可以通过计算时间戳之差来得到脉冲宽度。
具体的计算方法如下:1.配置定时器为输入捕获模式,并设置触发边沿(上升沿或下降沿)。
2.当捕获到脉冲边沿时,获取当前的定时器计数器值,作为开始时间戳。
3.当下一个脉冲边沿到来时,再次获取当前的定时器计数器值,作为结束时间戳。
4.计算时间戳之差,即为脉冲宽度。
脉冲频率的计算:脉冲频率是指单位时间内脉冲信号的个数。
脉冲频率的计算可以通过测量脉冲的周期来实现。
在STM32中,定时器的输入捕获模式可以测量脉冲的周期。
具体的计算方法如下:1.配置定时器为输入捕获模式,并设置触发边沿(上升沿或下降沿)。
2.当捕获到脉冲边沿时,获取当前的定时器计数器值,作为开始时间戳。
3.当接收到下一个脉冲边沿时,再次获取当前的定时器计数器值,作为结束时间戳。
4.计算时间戳之差,即为脉冲的周期。
5.频率等于周期的倒数。
需要注意的是,输入捕获功能只能测量单个脉冲的宽度和周期,如果要测量信号源的频率或平均脉冲宽度,需要根据测量的脉冲个数进行统计和计算。
以下是一个示例代码,演示了如何使用STM32的输入捕获功能计算脉冲宽度和频率:```c#include "stm32f4xx.h"//定义输入捕获相关的变量volatile uint32_t startTimestamp = 0;volatile uint32_t endTimestamp = 0;volatile uint32_t pulseWidth = 0;volatile uint32_t pulsePeriod = 0;volatile uint32_t pulseFrequency = 0;void TIM2_IRQHandler(void)if (TIM_GetITStatus(TIM2, TIM_IT_CC1) != RESET)if (startTimestamp == 0)startTimestamp = TIM_GetCapture1(TIM2);} elseendTimestamp = TIM_GetCapture1(TIM2);pulseWidth = endTimestamp - startTimestamp;pulsePeriod = pulseWidth * 2;pulseFrequency = SystemCoreClock / pulsePeriod;startTimestamp = 0;}TIM_ClearITPendingBit(TIM2, TIM_IT_CC1);}int main(void)//初始化定时器2TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_DeInit(TIM2);TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; // 设置计数器为向上计数模式TIM_TimeBaseInitStruct.TIM_Period = 0xFFFFFFFF; // 设置计数器的溢出值为最大值TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; // 设置时钟分割TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0; // 设置重复计数值为0TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStruct);//配置输入捕获模式TIM_ICInitTypeDef TIM_ICInitStruct;TIM_ICInitStruct.TIM_Channel = TIM_Channel_1; // 选择定时器通道1TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising; // 设置捕获参数,上升沿触发TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI; // 设置输入映射,直接连接至TIM2_IC1管脚TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1; // 设置输入分频,不分频TIM_ICInitStruct.TIM_ICFilter = 0; // 不开启滤波器TIM_ICInit(TIM2, &TIM_ICInitStruct);//开启输入捕获中断TIM_ClearITPendingBit(TIM2, TIM_IT_CC1);TIM_ITConfig(TIM2, TIM_IT_CC1, ENABLE);//启动定时器2TIM_Cmd(TIM2, ENABLE);while (1)}```在上述示例代码中,定时器2被配置为输入捕获模式,通过TIM2的通道1测量脉冲输入。
基于STM32CubeMX配置PWM输出和输入捕获

基于STM32CubeMX配置PWM输出和输⼊捕获PWM输出和输⼊捕获1、试验⽬标 1.输出2路PWM脉冲信号 2.捕获1路PWM脉冲信号 本次试验会使⽤到2个定时器,⼀个⾼级定时器⽤于脉冲捕获,⼀个普通定时器⽤于PWM脉冲输出。
2、准备材料 1. STM32F103C8 2. STM32CubeMX2、STM32CubeMX配置 2.1时钟树 系统时钟为72M,APB1 和APB2 的定时器时钟都为72MHZ。
2.2 PWM输出配置 PWM的输出配置⽐较简单,这⾥我们使⽤到了TIM2普通定时器控制输出,具体参数如下图。
在 Parameter Settings 页配置预分频系数为 72-1,计数周期(⾃动加载值)为 10000-1,定时器溢出频率,即PWM的周期,就是72MHz/(71+1)/(9999+1) = 100Hz 2.3 PWM输⼊捕获配置 PWM捕获,本次试验使⽤到了STM32F103C8的⾼级定时器TIM1。
配置如下图。
中断配置勾线这⾥,因为我们需要使⽤中断回调函数来计算频率占空⽐。
2.4 配置中断分组和中断使能2.5串⼝输出2.6⽣成⼯程 这⾥选择分离C.h⽂件,IDE 根据⾃⼰的环境选择,这⾥我使⽤的GUN编译⽅式的IDE所以选择了SW4SEM32。
以上CubeMX的PWM配置就完成了。
配置完毕后,⽣成⼯程打开。
下⾯我们来分析代码和如何使⽤。
3、代码实现 3.1 tim.c 该代码主要配置了Tim1 和Tim2 的相关配置,为什么要这么配置,在接下来的第4⼤点会详细说明。
这⾥主要了解HAL_TIM_IC_CaptureCallback 捕获中断回调函数这⾥函数主要处理计算占空⽐和频率。
/********************************************************************************* @file tim.c* @brief This file provides code for the configuration* of the TIM instances.******************************************************************************* @attention** <h2><center>© Copyright (c) 2021 STMicroelectronics.* All rights reserved.</center></h2>** This software component is licensed by ST under BSD 3-Clause license,* the "License"; You may not use this file except in compliance with the* License. You may obtain a copy of the License at:* /licenses/BSD-3-Clause********************************************************************************//* Includes ------------------------------------------------------------------*/#include "tim.h"/* USER CODE BEGIN 0 *//// 计算占空⽐时使⽤__IO uint16_t IC2Value = 0;__IO uint16_t IC1Value = 0;__IO float DutyCycle = 0;__IO float Frequency = 0;/* USER CODE END 0 */TIM_HandleTypeDef htim1; // ⾼级定时器捕获PWMTIM_HandleTypeDef htim2; // 普通定时器输出PWM/* TIM1 init function */void MX_TIM1_Init(void){TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_SlaveConfigTypeDef sSlaveConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};TIM_IC_InitTypeDef sConfigIC = {0};htim1.Instance = TIM1;htim1.Init.Prescaler = 72-1;htim1.Init.CounterMode = TIM_COUNTERMODE_UP; /* 计数⽅式上计数 */htim1.Init.Period = 65535; /* 计数器更新上限值 */htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; /* 采样时钟分频 */htim1.Init.RepetitionCounter = 0; /* 重装值=0 */htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE; /* ⾃动装载值软件使能 */ if (HAL_TIM_Base_Init(&htim1) != HAL_OK) /* 初始定时器 */{Error_Handler();}sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; /* 内部时钟源 */if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK){Error_Handler();}if (HAL_TIM_IC_Init(&htim1) != HAL_OK){Error_Handler();}///选择从模式: 复位模式sSlaveConfig.SlaveMode = TIM_SLAVEMODE_RESET;sSlaveConfig.InputTrigger = TIM_TS_TI1FP1; /* 选择定时器输⼊触发: TI1FP1 */ sSlaveConfig.TriggerPolarity = TIM_INPUTCHANNELPOLARITY_RISING;sSlaveConfig.TriggerFilter = 0;if (HAL_TIM_SlaveConfigSynchro(&htim1, &sSlaveConfig) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK){Error_Handler();}///IC1捕获上升沿触发 TI1FP1sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;sConfigIC.ICFilter = 0;if (HAL_TIM_IC_ConfigChannel(&htim1, &sConfigIC, TIM_CHANNEL_1) != HAL_OK){Error_Handler();}///IC2捕获下降沿捕获 TI1FP2sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_FALLING;sConfigIC.ICSelection = TIM_ICSELECTION_INDIRECTTI;if (HAL_TIM_IC_ConfigChannel(&htim1, &sConfigIC, TIM_CHANNEL_2) != HAL_OK){Error_Handler();}}/* TIM2 init function */void MX_TIM2_Init(void){TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};TIM_OC_InitTypeDef sConfigOC = {0};htim2.Instance = TIM2;/** htim2.Init.Prescaler 分频计算* 定时器时钟源TIMxCLK = 2 * PCLK1* PCLK1 = HCLK / 2* => TIMxCLK = HCLK/2 = SystemCoreClock / 2 *2=72MHz (APB1)* 设定定时器频率为=TIMxCLK/(TIM_Prescaler+1)=10KHz* */htim2.Init.Prescaler = 72-1;htim2.Init.CounterMode = TIM_COUNTERMODE_UP; /* 计数⽅式上升沿有效 */htim2.Init.Period = 10000-1; /* 累计 TIM_Period个后产⽣⼀个更新或者中断当定时器从0计数到10000,即为10000次,为⼀个定时周期*/ htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;if (HAL_TIM_Base_Init(&htim2) != HAL_OK){Error_Handler();}sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; /* 内部时钟源 */if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK){Error_Handler();}if (HAL_TIM_PWM_Init(&htim2) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK){Error_Handler();}///PWM模式配置sConfigOC.OCMode = TIM_OCMODE_PWM1; /* 配置为PWM模式1*/sConfigOC.Pulse = 5000; /* 默认占空⽐为50%*/sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; /* 当定时器计数值⼩于CCR1_Val时为⾼电平*/sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1) != HAL_OK) /* 配置PWM通道*/{Error_Handler();}if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_2) != HAL_OK){Error_Handler();}HAL_TIM_MspPostInit(&htim2); /* 外置GPIO初始化 */}void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle){GPIO_InitTypeDef GPIO_InitStruct = {0};if(tim_baseHandle->Instance==TIM1){/* USER CODE BEGIN TIM1_MspInit 0 *//* USER CODE END TIM1_MspInit 0 *//* TIM1 clock enable */__HAL_RCC_TIM1_CLK_ENABLE(); /*定时器时钟使能*/__HAL_RCC_GPIOA_CLK_ENABLE(); /*GPIO时钟使能*//**TIM1 GPIO ConfigurationPA8 ------> TIM1_CH1*/GPIO_InitStruct.Pin = GPIO_PIN_8; /* 36脚的F103 不能改变引脚编号*/GPIO_InitStruct.Mode = GPIO_MODE_INPUT; /* 输⼊模式*/GPIO_InitStruct.Pull = GPIO_NOPULL; /* ⽆上下拉*/HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/* TIM1 interrupt Init */HAL_NVIC_SetPriority(TIM1_CC_IRQn, 0, 0); /* 配置中断分组*/HAL_NVIC_EnableIRQ(TIM1_CC_IRQn); /* 使能中断*//* USER CODE BEGIN TIM1_MspInit 1 *//* USER CODE END TIM1_MspInit 1 */}else if(tim_baseHandle->Instance==TIM2){/* USER CODE BEGIN TIM2_MspInit 0 *//* USER CODE END TIM2_MspInit 0 *//* TIM2 clock enable */__HAL_RCC_TIM2_CLK_ENABLE();/* USER CODE BEGIN TIM2_MspInit 1 *//* USER CODE END TIM2_MspInit 1 */}}void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle){GPIO_InitTypeDef GPIO_InitStruct = {0};if(timHandle->Instance==TIM2){/* USER CODE BEGIN TIM2_MspPostInit 0 *//* USER CODE END TIM2_MspPostInit 0 */__HAL_RCC_GPIOA_CLK_ENABLE();/**TIM2 GPIO ConfigurationPA0-WKUP ------> TIM2_CH1PA1 ------> TIM2_CH2*/GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1; /* 这⾥定义了2路PMW输出⽤PA0 和PA1*/ GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/* USER CODE BEGIN TIM2_MspPostInit 1 *//* USER CODE END TIM2_MspPostInit 1 */}}void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle){if(tim_baseHandle->Instance==TIM1){/* USER CODE BEGIN TIM1_MspDeInit 0 *//* USER CODE END TIM1_MspDeInit 0 *//* Peripheral clock disable */__HAL_RCC_TIM1_CLK_DISABLE();/**TIM1 GPIO ConfigurationPA8 ------> TIM1_CH1*/HAL_GPIO_DeInit(GPIOA, GPIO_PIN_8);/* TIM1 interrupt Deinit */HAL_NVIC_DisableIRQ(TIM1_CC_IRQn);/* USER CODE BEGIN TIM1_MspDeInit 1 *//* USER CODE END TIM1_MspDeInit 1 */}else if(tim_baseHandle->Instance==TIM2){/* USER CODE BEGIN TIM2_MspDeInit 0 *//* USER CODE END TIM2_MspDeInit 0 *//* Peripheral clock disable */__HAL_RCC_TIM2_CLK_DISABLE();/* USER CODE BEGIN TIM2_MspDeInit 1 *//* USER CODE END TIM2_MspDeInit 1 */}}/* USER CODE BEGIN 1 *//*** @brief Conversion complete callback in non blocking mode 捕获回调函数* @param htim : hadc handle* @retval None*/void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim){if (htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1){/* 获取输⼊捕获值 */IC1Value = HAL_TIM_ReadCapturedValue(&htim1,TIM_CHANNEL_1);IC2Value = HAL_TIM_ReadCapturedValue(&htim1,TIM_CHANNEL_2);if (IC1Value != 0){/* 占空⽐计算 */DutyCycle = (float)((IC2Value+1) * 100) / (IC1Value+1);/* 频率计算 */Frequency = 72000000/72/(float)(IC1Value+1);}else{DutyCycle = 0;Frequency = 0;}}}/* USER CODE END 1 *//************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/3.2 main.c ⽤于计算的变量//计算占空⽐时的全局表变量extern __IO uint16_t IC2Value;extern __IO uint16_t IC1Value;extern __IO float DutyCycle;extern __IO float Frequency; 使能和输出PWM/// 使能捕获/⽐较2中断请求HAL_TIM_IC_Start_IT(&htim1,TIM_CHANNEL_1);HAL_TIM_IC_Start_IT(&htim1,TIM_CHANNEL_2);/// 开始输出PWMHAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1);HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2); 打印调试输出while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */printSwo("IC1Value =",IC1Value,LINE_FEED_EN);printSwo("IC2Value =",IC2Value,LINE_FEED_EN);printSwo("占空⽐:",DutyCycle,LINE_FEED_EN);printSwo("频率:",Frequency,LINE_FEED_EN);HAL_Delay(500);}3.3 输出结果短接任意⼀路输出 PA0与PA8 PWM输出与捕获,或 PA1与PA8 PWM输出与捕获。
输入捕获总结

输入捕获实验捕获是如何实现的?与定时器有什么关系?它为什么就能够捕获到呢?先入为主:可以利用定时器捕获某些IO口的高电平脉宽,脉宽时间可以通过串口打印得到。
输入捕获模式可以用来测量脉冲宽度或者测量频率。
STM32定时器除了TIM6和TIM7,其他的都具有输入捕获功能。
STM32的输入捕获,简单的说就是通过检测TIMx_CHx上的边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定时器的值存放到对应的通道的捕获/比较寄存器(TIMx_CCRx)里面,完成一次捕获。
捕获模式与比较模式的理解:捕获模式的原理是选定的输入引脚发生选定的脉冲出发沿的时候,则该时刻定时器的计数值TIMx_CNT将被保存,同时产生中断(TIMx_CNT的值不会与任何东西进行比较)。
该功能最常用的的就是测量一个外来脉冲的脉宽。
比较模式的原理是当CCRx寄存器中设定的值与定时器计数器值相等的时候,相关引脚发生电平跳变,同时产生中断。
该功能常应用于产生一个一定脉宽的PWM波形。
数字滤波器由一个事件计数器组成,它记录到N个事件后会产生一个输出的跳变:这个N 可以取值具体参考中文手册,意思是说:我采样高电平,只有连续采样到N个电平是高电平的话我才认为是有效的高电平,低于N个我就认为是无效的。
PWM输入捕获模式是输入捕获模式的特例,自己理解如下1. 每个定时器有四个输入捕获通道IC1、IC2、IC3、IC4。
且IC1 IC2一组,IC3 IC4一组。
并且可是设置管脚和寄存器的对应关系。
2. 同一个TIx输入映射了两个ICx信号。
3. 这两个ICx信号分别在相反的极性边沿有效。
4. 两个边沿信号中的一个被选为触发信号,并且从模式控制器被设置成复位模式。
5. 当触发信号来临时,被设置成触发输入信号的捕获寄存器,捕获“一个PWM周期(即连续的两个上升沿或下降沿)”,它等于包含TIM时钟周期的个数(即捕获寄存器中捕获的为TIM的计数个数n)。
STM32Cube学习之八:输入捕获
STM32Cube学习之八:输入捕获假设已经安装好STM32CubeMX和STM32CubeF4支持包。
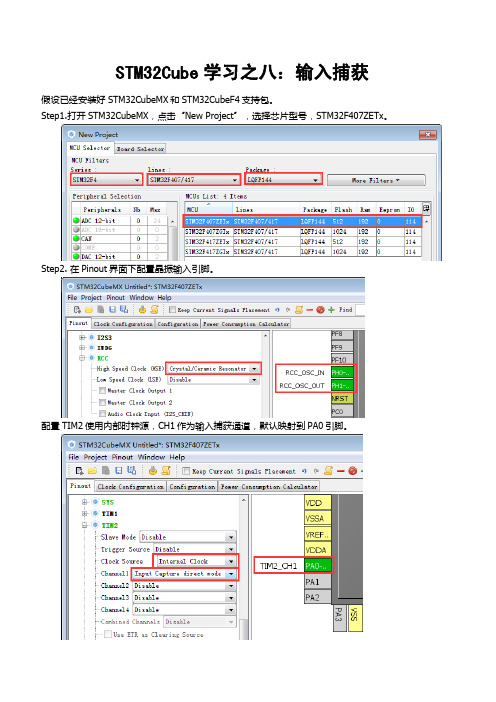
Step1.打开STM32CubeMX,点击“New Project”,选择芯片型号,STM32F407ZETx。
Step2. 在Pinout界面下配置晶振输入引脚。
配置TIM2使用内部时钟源,CH1作为输入捕获通道,默认映射到PA0引脚。
配置TIM3使用内部时钟,CH1~CH4为PWM输出通道,默认映射引脚分别为PA6,PA7,PB0,PB1。
配置TIM4使用内部时钟,CH1,CH2为PWM输出通道,映射引脚分别为PD12,PD13。
配置串口,作为信息输出接口。
Step3.在Clock Configuration界面配置时钟源。
使用外部8M晶振作PLL时钟输入,并使用PLL输出作为系统时钟。
为了后面的计算方便,将系统时钟配置成160MHz。
Step4.配置外设参数。
在configuration界面中点击TIM2/ TIM3/ TIM4按钮,可以进入参数配置界面。
TIM2:在Parameter Settings页配置预分频系数为7,其计数时钟就是80MHz/(7+1)=10MHz。
计数周期(自动加载值),转换为十六进制形式,输入32bit最大值0xFFFFFFFF。
注意,TIM2的自动加载寄存器ARR和各个通道的捕获/比较寄存器CCRx都是32bit的。
在NVIC页面使能捕获/比较中断。
在GPIO页面设置捕获输入引脚下拉电阻,设置成上拉也可以,主要是为了使在没有信号输入时在输入引脚上得到稳定的电平。
TIM3:在Parameter页配置预分频系数为7,计数周期(自动加载值)为9999。
其溢出频率就是80MHz/(7+1)/(9999+1)=1kHz,这就是TIM3各通道输出的PWM信号的频率。
各通道输出PWM的占空比参数如上图红框标注,其他参数使用默认值。
按照图中参数,CH1~CH4输出的PWM周期都是1ms,而高电平时间分别是123.4us,234.5us,567.8us,678.9us。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
STM32Cube学习之八:输入捕获
假设已经安装好STM32CubeMX和STM32CubeF4支持包。
Step1.打开STM32CubeMX,点击“New Project”,选择芯片型号,STM32F407ZETx。
Step2. 在Pinout界面下配置晶振输入引脚。
配置TIM2使用内部时钟源,CH1作为输入捕获通道,默认映射到PA0引脚。
配置TIM3使用内部时钟,CH1~CH4为PWM输出通道,默认映射引脚分别为PA6,PA7,PB0,PB1。
配置TIM4使用内部时钟,CH1,CH2为PWM输出通道,映射引脚分别为PD12,PD13。
配置串口,作为信息输出接口。
Step3.在Clock Configuration界面配置时钟源。
使用外部8M晶振作PLL时钟输入,并使用PLL输出作为系统时钟。
为了后面的计算方便,将系统时钟配置成160MHz。
Step4.配置外设参数。
在configuration界面中点击TIM2/ TIM3/ TIM4按钮,可以进入参数配置界面。
TIM2:在Parameter Settings页配置预分频系数为7,其计数时钟就是80MHz/(7+1)=10MHz。
计数周期(自动加载值),转换为十六进制形式,输入32bit最大值0xFFFFFFFF。
注意,TIM2的自动加载寄存器ARR和各个通道的捕获/比较寄存器CCRx都是32bit的。
在NVIC页面使能捕获/比较中断。
在GPIO页面设置捕获输入引脚下拉电阻,设置成上拉也可以,主要是为了使在没有信号输入时在输入引脚上得到稳定的电平。
TIM3:在Parameter页配置预分频系数为7,计数周期(自动加载值)为9999。
其溢出频率就是80MHz/(7+1)/(9999+1)=1kHz,这就是TIM3各通道输出的PWM信号的频率。
各通道输出PWM的占空比参数如上图红框标注,其他参数使用默认值。
按照图中参数,CH1~CH4输出的PWM周期都是1ms,而高电平时间分别是123.4us,234.5us,567.8us,678.9us。
在GPIO页面配置相关引脚的特性。
TIM4:在Parameter页配置预分频系数为7,计数周期(自动加载值)为999。
其溢出频率就是80MHz/(7+1)/(999+1)=10kHz,这就是TIM4各通道输出的PWM信号的频率。
各通道输出PWM的占空比参数如上图红框标注,其他参数使用默认值。
CH1,CH2输出的PWM周期都是100us,而高电平时间分别是23.4us,56.7us。
在GPIO页面配置相关引脚的特性。
串口参数配置,使用默认值即可。
Step5.生成源代码。
点击生成源代码按钮。
在设置界面中输入工程名,保存路径,工程IDE类型,点OK即可。
生成代码完成后可直接打开工程。
弹出如下对话框时,如果已经安装了F4的支持包,则点击OK关闭。
如果没有安装,则点击界面中的/...链接,找到芯片的支持包,然后安装。
关闭后面的界面。
点击“是”,然后选择芯片型号。
可以在搜索框中输入关键字,加快选择速度。
Step6.添加功能代码。
先在main.c文件用户代码区输入包含标准输入输出头文件。
在用户代码区4实现标准输出printf()的底层驱动函数fputc(),功能是在UART1输出一个字符。
在主函数前面的用户代码区0,定义一些全局变量。
在while(1)之前的用户代码区2,使能TIM3、TIM4的各个通道PWM输出。
在while(1)中的用户代码区3,写入TIM2 CH1通道的输入捕获控制和数据处理。
在main文件的用户代码区4,写入TIM2输入捕获中断处理回调函数。
至此,工程完成。
功能是使用TIM的输入捕获功能,实现对PWM信号的周期和占空比测量,并将数据通过串口发送出去。
用杜邦线将PA0和其他PWM信号输出脚相连,即可测量信号的周期,高电平所占时间,以及占空比,在串口1会输出这些信息。
输出信息示例如下:
Cycle:1.0000ms
High :0.1234ms
Duty :12.3%
Cycle:0.1000ms
High :0.0567ms
Duty :56.7%
按照本例的配置,测量精度是0.1us,测量信号周期范围是0~0xFFFFFFFF*0.1us,即0~429.4967295秒
测量基本思路是:
1.设置TIM2 CH1为输入捕获功能;
2.设置上升沿捕获;
3.使能TIM2 CH1捕获功能;
4.捕获到上升沿后,存入capture_buf[0],改为捕获下降沿;
5.捕获到下降沿后,存入capture_buf[1],改为捕获上升沿;
6.捕获到上升沿后,存入capture_buf[2],关闭TIM2 CH1捕获功能;
7.计算:capture_buf[2] - capture_buf[0]就是周期,capture_buf[1] - capture_buf[0]就是高电
平所占时间。
特别说明:
printf()函数的详细使用方法可到网上查找,在此仅解释本例的语句。
printf("Cycle:%.4fms\r\n", pwm_cycle/10000.0);
其中“%f”是输出浮点数的格式,加了“.4”就是保留4位小数。
pwm_cycle是32bit无符号整形,除以10000.0就是先将其变成小数,在除以10000。
printf("Duty :%.1f%%\r\n", duty/10.0);
因为%在printf()函数的格式转换中是格式转换的特殊符号,因此要打印一个“%”时,就要写成“%%”。
HAL_TIM_PWM_Start()函数用于使能定时器某一通道的PWM输出。
HAL_TIM_IC_Start_IT()函数用于使能定时器某一通道的输入捕获功能,并使能相应的中断。
对应的HAL_TIM_IC_Stop_IT()函数和其功能相反,是关闭定时器某一通道的输入捕获功能和相应中断。
__HAL_TIM_SET_CAPTUREPOLARITY不是函数,而是底层操作的一个宏定义。
在stm32f4xx_hal_tim.h文件中可以找到。
其作用是修改定时器某一通道的输入捕获极性。
__HAL_TIM_GET_COMPARE也是一个宏定义。
在stm32f4xx_hal_tim.h文件中可以找到。
其作用是获取定时器某一通道的捕获/比较寄存器值。
根据我使用CubeMX开发的经验,发现HAL库并没有把所有的操作都封装成函数。
对于底层的寄存器操作(如本例中的读取捕获/比较寄存器),还有修改外设的某个配置参数(如本例中的改变输入捕获的极性),HAL库会使用宏定义来实现。
而且会用__HAL_作为这类宏定义的前缀。
获取某个参数,宏定义中一般会有_GET,而设置某个参数的,宏定义中就会有_SET。
在开发过程中,如果遇到寄存器级别或者更小范围的操作时,可以到该外设的头文件中查找,一般都能找到相应的宏定义。
官方例程请参考stm32cubef4.zip解压后
STM32Cube_FW_F4_V1.11.0\Projects\STM324xG_EVAL\Examples\TIM\TIM_InputCapture目录下的工程。
S.D.Lu 于深圳
2016年8月。