ROS自己做
ros多线做端口映射脚本

正文开始,脚本在下面。
我做完ROS加VLAN ADSL多线PCC叠加设置设置后不久,网站开发小组的项目经理就找到我向我提出了需求,因为现在他们的测试服务器是放在我们办公室内网的,我们公司其它部门和其它分公司和我们办公室不是一个局域网,网站开发小组的项目经理想让我们公司的所有同事都能访问到测试服务器做用户体验度测试,想让我帮助实现,当时我一口答应下来,也觉得这是个很简单的事情,但是事情往往出人意料。
我一开始的思路是这样的,第一步就是在IP->firewall-> nat下面做基于目标的伪装,也就是映射,第二步就是要做回流让内网的客户端也能通过公网IP 访问到服务器,第三步就是做动态映射的计划任务,定时更新第一步里面的目标地址即ADSL的地址,最后一步就要用到DDNS做一个二级域名的动态解析方便同事记忆和输入。
做完以后发现需求基本满足,就是内网客户端不能通过域名访问到服务器,只能通过内网IP访问,为了精益求精,继续研究,baidu和google 上搜索了无数方法均无效,后来在一个论坛里面看到一个高人的回复内容给了我启发,于是再一次尝试配置居然成功了。
不敢独享,现在将思路和脚本整理分享给更多需要的人。
首先我来分析下出现上述问题的原因,因为我们这里的环境是多线叠加的,我们的每个连接在进行路由之前都会对连接进行标记并路由,不同的标记有可能走不同的路由导致数据没办法顺利到达服务器,其内部数据的具体流向以及转换我也不是很清楚,如有高手路过请不吝赐教。
下面进入正题,其实很简单,我们只要在标记里面把目标地址为我们的外网接口地址的数据直接通过就可以解决这个问题了,有几条线就做几个标记,最后要添加计划任务更新标记里的目标地址为对应的外网接口地址,所以加上这最后两步一共是六步,下面就放出每一步的脚本(我的环境是双线叠加的,所以以下脚本都是适合双线的,改成多线的也很容易)1、做映射,这里以把内网的8890端口映射成9000端口为例。
ROS软路由双线制作方法
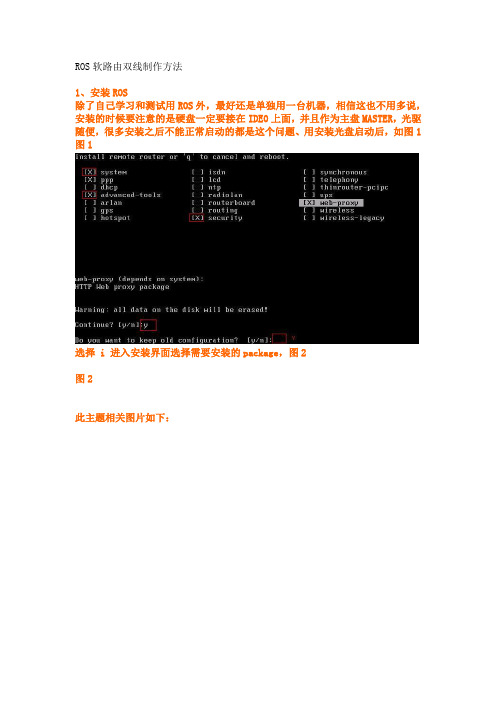
ROS软路由双线制作方法1、安装ROS除了自己学习和测试用ROS外,最好还是单独用一台机器,相信这也不用多说,安装的时候要注意的是硬盘一定要接在IDE0上面,并且作为主盘MASTER,光驱随便,很多安装之后不能正常启动的都是这个问题、用安装光盘启动后,如图1 图1选择 i 进入安装界面选择需要安装的package,图2图2此主题相关图片如下:选择 i 进入安装界面选择需要安装的package,图2 图2此主题相关图片如下:选择完后,再按i安装,y确定,再按n不保存旧配置。
最后回车重新启动,这时进入ROS是未注册的版本,如图4图4[replyview]此主题相关图片如下:用光驱启动,在启动菜单按c破解,图5 图5此主题相关图片如下:破解之后进入已经没有了未注册提示。
见图6图3此主题相关图片如下:2、服务端配置/interface pri 能显示出你现在可用的网卡。
如图6 图6此主题相关图片如下:/ip addressadd address=192.168.1.1/24 interface=ether1设置ether1为内网IP,其中192.168.1.1/24添自己的内网IP ,设置成功没有提示,可以用pri查看在局域网其他机器IE浏览器192.168.1.1 进入WEBBOX,左边可以下载WINBOX,当然如果你已经有WINBOX可以省略这步。
打开WINBOX 输入IP和用户名连接(图8)图8此主题相关图片如下:进入配置界面(1)点左侧INTERFACE,双击ether1将name改为lan,同样将另两个改为cnc 和tel。
图9图9此主题相关图片如下:(2)左侧IP->ADDRESS ,+号,分别设置CNC和TEL的IP地址,添网通和电信给的IP/子网掩码(不要和我的一样...),红叉部分是自动添加的.图10图10此主题相关图片如下:3、winbox配置(所有配置都在这里进行)(3)IP->ROUTE,+号添加默认的网关,默认网通就添网通网关,默认电信就添电信的网关,这里默认电信.如图11,正常下黑圈处为AS,黄圈出为ment设注释为tel图11此主题相关图片如下:(4)IP->FIREWALL,NAT选项卡,+号添加chain:srcnat,src.addr:192.168.1.0/24,ACTION选项卡里为masquerade.OK,现在可以通过电信上网了.图12图12此主题相关图片如下:(5)FTP://admin:@192.168.1.1上传路由表文件cnc.rsc,如图13 图13此主题相关图片如下:图14此主题相关图片如下:现在已经可以电信网通自动切换了.(6)只是切换也不太安全,一定要配制一下防火墙么,同5一样,上传防火墙的RSC 文件到192.168.1.1,在NEW TERMINAL里执行import firewall,整体和第5步相近.(7)配置的差不多了,该改管理员账号了,左侧USERS,双击ADMIN改个名字和右下脚的password,如果不需要远程修改ROS的话,可以设定访问IP,192.168.1.0/24之类的~~~图16此主题相关图片如下:路由配置基本命令Access-enable 允许路由器在动态访问列表中创建临时访问列表入口Access-group 把访问控制列表(ACL)应用到接口上Access-list 定义一个标准的IP ACLAccess-template 在连接的路由器上手动替换临时访问列表入口Appn 向APPN子系统发送命令Atmsig 执行ATM信令命令B 手动引导操作系统Bandwidth 设置接口的带宽Banner motd 指定日期信息标语Bfe 设置突发事件手册模式Boot system 指定路由器启动时加载的系统映像Calendar 设置硬件日历Cd 更改路径Cdp enable 允许接口运行CDP协议Clear 复位功能Clear counters 清除接口计数器Clear interface 重新启动接口上的件逻辑Clockrate 设置串口硬件连接的时钟速率,如网络接口模块和接口处理器能接受的速率Cmt 开启/关闭FDDI连接管理功能Config-register 修改配置寄存器设置Configure 允许进入存在的配置模式,在中心站点上维护并保存配置信息Configure memory 从NVRAM加载配置信息Configure terminal 从终端进行手动配置Connect 打开一个终端连接Copy 复制配置或映像数据Copy flash tftp 备份系统映像文件到TFTP服务器Copy running-config startup-config 将RAM中的当前配置存储到NVRAMCopy running-config tftp 将RAM中的当前配置存储到网络TFTP服务器上Copy tftp flash 从TFTP服务器上下载新映像到FlashCopy tftp running-config 从TFTP服务器上下载配置文件Debug 使用调试功能Debug dialer 显示接口在拨什么号及诸如此类的信息Debug ip rip 显示RIP路由选择更新数据Debug ipx routing activity 显示关于路由选择协议(RIP)更新数据包的信息Debug ipx sap 显示关于SAP(业务通告协议)更新数据包信息Debug isdn q921 显示在路由器D通道ISDN接口上发生的数据链路层(第2层)的访问过程Debug ppp 显示在实施PPP中发生的业务和交换信息Delete 删除文件Deny 为一个已命名的IP ACL设置条件Dialer idle-timeout 规定线路断开前的空闲时间的长度Dialer map 设置一个串行接口来呼叫一个或多个地点Dialer wait-for-carrier-time 规定花多长时间等待一个载体Dialer-group 通过对属于一个特定拨号组的接口进行配置来访问控制Dialer-list protocol 定义一个数字数据接受器(DDR)拨号表以通过协议或ACL与协议的组合来控制控制拨号Dir 显示给定设备上的文件Disable 关闭特许模式Disconnect 断开已建立的连接Enable 打开特许模式Enable password 确定一个密码以防止对路由器非授权的访问Enable password 设置本地口令控制不同特权级别的访问Enable secret 为enable password命令定义额外一层安全性 (强制安全,密码非明文显示)Encapsulation frame-relay 启动帧中继封装Encapsulation novell-ether 规定在网络段上使用的Novell独一无二的格式Encapsulation PPP 把PPP设置为由串口或ISDN接口使用的封装方法Encapsulation sap 规定在网络段上使用的以太网802.2格式Cisco 的密码是sapEnd 退出配置模式Erase 删除闪存或配置缓存Erase startup-config 删除NVRAM中的内容Exec-timeout 配置EXEC命令解释器在检测到用户输入前所等待的时间Exit 退出所有配置模式或者关闭一个激活的终端会话和终止一个EXECExit 终止任何配置模式或关闭一个活动的对话和结束EXECformat 格式化设备Frame-relay local-dlci 为使用帧中继封装的串行线路启动本地管理接口(LMI)Help 获得交互式帮助系统History 查看历史记录Hostname 使用一个主机名来配置路由器,该主机名以提示符或者缺省文件名的方式使用Interface 设置接口类型并且输入接口配置模式Interface 配置接口类型和进入接口配置模式Interface serial 选择接口并且输入接口配置模式Ip access-group 控制对一个接口的访问Ip address 设定接口的网络逻辑地址Ip address 设置一个接口地址和子网掩码并开始IP处理Ip default-network 建立一条缺省路由Ip domain-lookup 允许路由器缺省使用DNSIp host 定义静态主机名到IP地址映射Ip name-server 指定至多6个进行名字-地址解析的服务器地址Ip route 建立一条静态路由Ip unnumbered 在为给一个接口分配一个明确的IP地址情况下,在串口上启动互联网协议(IP)的处理过程Ipx delay 设置点计数Ipx ipxwan 在串口上启动IPXWAN协议Ipx maximum-paths 当转发数据包时设置Cisco IOS软件使用的等价路径数量Ipx network 在一个特定接口上启动互联网数据包交换(IPX)的路由选择并且选择封装的类型(用帧封装)Ipx router 规定使用的路由选择协议Ipx routing 启动IPX路由选择Ipx sap-interval 在较慢的链路上设置较不频繁的SAP(业务广告协议)更新Ipx type-20-input-checks 限制对IPX20类数据包广播的传播的接受Isdn spid1 在路由器上规定已经由ISDN业务供应商为B1信道分配的业务简介号(SPID)Isdn spid2 在路由器上规定已经由ISDN业务供应商为B2信道分配的业务简介号(SPID)Isdntch-type 规定了在ISDN接口上的中央办公区的交换机的类型 Keeplive 为使用帧中继封装的串行线路LMI(本地管理接口)机制 Lat 打开LAT连接Line 确定一个特定的线路和开始线路配置Line concole 设置控制台端口线路Line vty 为远程控制台访问规定了一个虚拟终端Lock 锁住终端控制台Login 在终端会话登录过程中启动了密码检查Login 以某用户身份登录,登录时允许口令验证Logout 退出EXEC模式Mbranch 向下跟踪组播地址路由至终端Media-type 定义介质类型Metric holddown 把新的IGRP路由选择信息与正在使用的IGRP路由选择信息隔离一段时间Mrbranch 向上解析组播地址路由至枝端Mrinfo 从组播路由器上获取邻居和版本信息Mstat 对组播地址多次路由跟踪后显示统计数字Mtrace 由源向目标跟踪解析组播地址路径Name-connection 命名已存在的网络连接Ncia 开启/关闭NCIA服务器Network 把一个基于NIC的地址分配给一个与它直接相连的路由器把网络与一个IGRP的路由选择的过程联系起来在IPX路由器配置模式下,在网络上启动加强的IGRPNetwork 指定一个和路由器直接相连的网络地址段Network-number 对一个直接连接的网络进行规定No shutdown 打开一个关闭的接口Pad 开启一个X.29 PAD连接Permit 为一个已命名的IP ACL设置条件Ping 把ICMP响应请求的数据包发送网络上的另一个节点检查主机的可达性和网络的连通性对网络的基本连通性进行诊断Ping 发送回声请求,诊断基本的网络连通性Ppp 开始IETF点到点协议Ppp authentication 启动Challenge握手鉴权协议(CHAP)或者密码验证协议(PAP)或者将两者都启动,并且对在接口上选择的CHAP和PAP验证的顺序进行规定Ppp chap hostname 当用CHAP进行身份验证时,创建一批好像是同一台主机的拨号路由器Ppp chap password 设置一个密码,该密码被发送到对路由器进行身份验证的主机命令对进入路由器的用户名/密码的数量进行了限制 Ppp pap sent-username 对一个接口启动远程PAP支持,并且在PAP 对同等层请求数据包验证过程中使用sent-username和password Protocol 对一个IP路由选择协议进行定义,该协议可以是RIP,内部网关路由选择协议(IGRP),开放最短路径优先(OSPF),还可以是加强的IGRPPwd 显示当前设备名Reload 关闭并执行冷启动;重启操作系统Rlogin 打开一个活动的网络连接Router 由第一项定义的IP路由协议作为路由进程,例如:router rip 选择RIP作为路由协议Router igrp 启动一个IGRP的路由选择过程Router rip 选择RIP作为路由选择协议Rsh 执行一个远程命令Sdlc 发送SDLC测试帧Send 在tty线路上发送消息Service password-encryption 对口令进行加密Setup 运行Setup命令Show 显示运行系统信息Show access-lists 显示当前所有ACL的内容Show buffers 显示缓存器统计信息Show cdp entry 显示CDP表中所列相邻设备的信息Show cdp interface 显示打开的CDP接口信息Show cdp neighbors 显示CDP查找进程的结果Show dialer 显示为DDR(数字数据接受器)设置的串行接口的一般诊断信息Show flash 显示闪存的布局和内容信息Show frame-relay lmi 显示关于本地管理接口(LMI)的统计信息 Show frame-relay map 显示关于连接的当前映射入口和信息Show frame-relay pvc 显示关于帧中继接口的永久虚电路(pvc)的统计信息Show hosts 显示主机名和地址的缓存列表Show interfaces 显示设置在路由器和访问服务器上所有接口的统计信息 Show interfaces 显示路由器上配置的所有接口的状态Show interfaces serial 显示关于一个串口的信息Show ip interface 列出一个接口的IP信息和状态的小结Show ip interface 列出接口的状态和全局参数Show ip protocols 显示活动路由协议进程的参数和当前状态Show ip route 显示路由选择表的当前状态Show ip router 显示IP路由表信息Show ipx interface 显示Cisco IOS软件设置的IPX接口的状态以及每个接口中的参数Show ipx route 显示IPX路由选择表的内容Show ipx servers 显示IPX服务器列表Show ipx traffic 显示数据包的数量和类型Show isdn active 显示当前呼叫的信息,包括被叫号码、建立连接前所花费的时间、在呼叫期间使用的自动化操作控制(AOC)收费单元以及是否在呼叫期间和呼叫结束时提供AOC信息Show isdn ststus 显示所有isdn接口的状态、或者一个特定的数字信号链路(DSL)的状态或者一个特定isdn接口的状态Show memory 显示路由器内存的大小,包括空闲内存的大小Show processes 显示路由器的进程Show protocols 显示设置的协议Show protocols 显示配置的协议。
ROS软路由详细设置(图文)

ROS软路由设置提示:此软件为顶级软路由软件!赶快用吧!记的要《全盘ghost!不是分区ghost恢复哦!是全盘恢复!》不要怀疑软路由的性能,也不用担心所谓的耗电多少。
软路由具有极高的性能和广泛的应用。
可轻易实现双线策略、arp绑定、限速、封杀BT以及网吧借线、vpn等。
尤其对有连锁网吧经营者,利用IPIP协议,不仅可实现借线目的,还可象本地操作一样远程管理其他网吧。
这些,一般硬路由根本无法与之比拟。
我以前对硬路由一直情有独钟,换上软路由后,对它的强大功能赞叹不已。
现在利用它的内置VPN技术轻易做出电信网通加速软件-南北网桥(),又给两家网吧试做了IPIP借线,在这种比较大的压力下,软路由依然运行良好。
ROS软路由基本设置非常简单,如果只做路由转发,以下几步数分钟即可高定:硬件准备:A.首先下载软路由的ghost硬盘版,本站已经在压缩包总提供!B.释放后,ghost至一个小硬盘(20G以下),注意,是整盘GHOST而不是分区。
C.将该硬盘挂在要做路由电脑上,注意必须接在第一个IDE并且是主硬盘接口。
插上一张网卡,这是接内网的LAN。
开机。
软件设置:1.开机,出现登陆提示。
用户:admin 密码:空2.输入setup再按两次A3.在ether1后面输入你的内网IP,如:192.168.0.254/24 (这里/24是24位掩码与255.255.255.0一样)4.输入完ip后,按两次x退出,现在可以可以ping通192.168.0.254了,也可用winbox在图形界面下访问路由了。
5.关机,插上另一张网卡,这个是接外网的,即W AN,现在可以去掉软路由电脑的显示器和键盘了。
6.开机,运行winbox以admin身份登陆7.添加外网网卡。
在ip---address里按+,address输入你的外网ip和掩码位,比如218.56.37.11/29。
network和BROADCAST不填,INTERFACE里选择ethr28.增加外网网关。
ROS 软路由命令和制作

History 查看历史记载
Hostname 使用一个主机名来配置路由器,该主机名以提醒符或者缺省文件名的方法使用
Interface 设置接口类型并且输入接口配置模式
Interface 配置接口类型和进入接口配置模式
Ip domain-lookup 许可路由器缺省使用DNS
Ip host 定义静态主机名到IP地址映射
Ip name-server 指定至多6个进行名字-地址解析的服务器地址
Ip route 树立一条静态路由
Ip unnumbered 在为给一个接口分配一个明白的IP地址情形下,在串口上启动互联网协议(IP)的处置过程
图8
此主题相干图片如下:
进入配置界面
(1)点左侧INTERFACE,双击ether1将name改为lan,同样将另两个改为cnc和tel。图9
图9
此主题相关图片如下:
(2)左侧IP->ADDRESS ,+号,分辨设置CNC和TEL的IP地址,添网通和电信给的IP/子网掩码(不要和我的一样...),红叉部分是自动添加的.图10
add address=192.168.1.1/24 interface=ether1
设置ether1为内网IP,其中192.168.1.1/24添自己的内网IP ,设置胜利没有提醒,可以用pri查看在局域网其他机器IE阅读器192.168.1.1 进入WEBBOX,左边可以下载WINBOX,当然如果你已经有WINBOX可以省略这步。打开WINBOX输入IP和用户名连接(图8)
此主题相关图片如下:
(4)IP->FIREWALL,NAT选项卡,+号添加chain:srcnat,src.addr:192.168.1.0/24,ACTION选项卡里为masquerade.OK,现在可以通过电信上网了.图12
ROS教程设置总结

ROS教程设置总结ROS教程(1)---基本配置一、LAN口配置:(admin为用户名,密码为空登录控制台)1、查看已经安装的网卡>interface print (可缩写为int pri)2、更改网卡名字〉int〉pri>set 0 name=lan3设置内网卡的ip和子网掩码(先返回顶层目录,用“/”键)〉ip address add address=192.168.194.1/24 interface=lan4、打开winbox,以192.168.194.1为地址,admin为用户名,密码为空登陆。
5、在winbox下单击"interface"--->双击列表中"name"栏中的连接ISP的网卡--->"name"更名为"WAN"。
二、WAN口配置:1、通过ADSL拨号上网(1)如果电信等ISP已将帐号和相关的MAC地址绑定过,则需要修改WAN口MAC地址,否则跳到下一步。
在winbox下单击"new terminal"--->输入命令"interface ethernet"--->set WANmac-address=00:00:00:00:00:00--->通过print命令查看修改是否成功。
(2)建立pppoe连接到电信或其它ISP。
"PPP"--->"+"--->"general"选项卡--->在"name"中拨号名,如Tel,在"interface"中选择WAN口--->"Dial out"选项卡中,"user"域中输入用户名,"password"中输入密码(ISP提供的),并且确保"Add default Route"处于选中状态--->"apply"--->"OK"。
ROS操作步骤范文

ROS操作步骤范文ROS(机器人操作系统)是一个开源的、灵活的机器人软件平台,它提供了一系列工具和库,用于帮助开发者构建机器人应用程序。
以下是ROS操作的一般步骤:1.安装ROS:2.创建工作空间:一旦ROS安装完成,你需要创建一个ROS的工作空间。
工作空间是你存放ROS包的目录。
使用以下命令在终端中创建一个工作空间:$ mkdir -p ~/catkin_ws/src$ cd ~/catkin_ws/$ catkin_make3.创建包和节点:ROS使用包(package)和节点(node)的概念来组织软件功能。
一个包可以包含一个或多个节点。
使用以下命令在终端中创建一个包:$ cd ~/catkin_ws/src$ catkin_create_pkg my_package roscpp std_msgs4.编写和编译代码:创建包成功后,你可以在包的目录下编写你的代码。
ROS使用C++和Python作为主要的编程语言。
使用ROS提供的库和接口,你可以方便地与ROS系统中的其他部分进行通信。
编写代码后,你需要编译它们。
使用以下命令在终端中编译代码:$ cd ~/catkin_ws$ catkin_make5.运行ROS核心:ROS核心(ROS Core)是ROS系统的关键组件,它提供了ROS节点之间的通信和调度功能。
你需要在终端中运行ROS核心以启动ROS系统。
使用以下命令在终端中运行ROS核心:$ roscore6.运行节点:在ROS系统中,你可以同时启动多个节点,它们可以相互通信和协作。
使用以下命令在终端中运行一个节点:$ rosrun package_name node_name7.节点之间的通信:ROS提供了一种称为消息(message)的机制,用于节点之间的通信。
消息是一种结构化的数据类型,可以在节点之间传输。
你可以定义自己的消息类型,并使用ROS提供的工具生成代码。
节点可以通过发布(publish)和订阅(subscribe)消息来实现通信。
ROS软路由制作教程

ROS软路由制作教程2008-01-13 13:44:28| 分类:资料心得|字号大中小订阅网吧专用ros软路由教程(非常详细)一:安装1、光盘版的(转自雨纷飞大哥作品)将iso文件刻录成可引导光盘。
机器的硬盘设置为IDE0,即第一个IDE通道的主盘。
bios设置光盘引导系统,放入光盘启动机器得到如下选择2:Install RouteOS 2.8.18后稍等,得到如下画面:用方向键和空格选择你需要的模组功能后,按"A"全选,摁“i“键确定安装。
会再次询问你继续?yes or no?,摁“Y“.然后又问:do you want to keep lod configuraton?你需要保留旧的结构么?摁“N然后开始自动的格式化磁盘、安装核心、安装模组。
最后提示:Press ENTER to Reboot,按回车重新启动机器.重新启动后出现图片1的哪个引导画面(如果没有出现而直接进入了登陆界面说明用硬盘引导了)选择3: Crack RouteOS Floppy Disk,开始破解。
破解过程都是中文的。
如果你的硬盘在IDE0:0的话破解是不会有问题的。
否则可能出现系统文件被破坏、启动时0123456...循环出现等问题。
问你是否重启呢。
把光盘拿出来后按下Y确定重启动重新启动后开始登陆。
初始用户名admin,初始密码为空。
咦?怎么还有提示注册的信息和Soft ID?原来是还需要一个命令激活注册补丁才可以哦:输入命令:/system license import file-name=key或者缩写为/sy lic i f key然后提示你是否重新启动。
按Y重新启动重新启动并用admin:““登陆后发现,提示注册的信息已经完全消失了,现在是正式版了现在服务器启动起来了,但是还没有任何配置,若想用winbox对其进行控制,则必须激活和配置网卡的ip 掩码等。
这里我装了三块网卡,一块接电信,一块接网通,一块路由后接内网交换机。
ros编程项目案例
ros编程项目案例ROS(Robot Operating System)是一种开源的机器人操作系统,提供了一系列的库和工具,用于帮助开发者构建机器人应用程序。
在ROS编程中,开发者可以使用C++或Python等编程语言进行开发,实现机器人的感知、控制、导航等功能。
下面是一些符合题目要求的ROS编程项目案例:1. 智能巡线车:使用ROS和视觉传感器,实现一个能够自主巡线并避障的智能小车。
通过摄像头获取实时图像,在ROS中进行图像处理,识别巡线路径并控制小车沿路径行驶。
2. 智能家居控制系统:利用ROS和各种传感器(如温度传感器、湿度传感器、光照传感器等),实现一个智能家居控制系统。
通过ROS 中的节点通信机制,实时获取传感器数据,并根据预设的规则控制家居设备的开关。
3. 自主导航机器人:利用ROS和激光雷达等传感器,实现一个能够自主导航的机器人。
通过激光雷达获取环境地图,并使用SLAM算法进行建图和定位,然后使用导航算法规划路径,实现机器人的自主导航功能。
4. 机器人视觉导航:利用ROS和深度学习算法,实现一个能够通过视觉感知进行导航的机器人。
通过摄像头获取实时图像,在ROS中进行图像识别和目标检测,然后使用导航算法规划路径,实现机器人的视觉导航功能。
5. 机器人语音控制:利用ROS和语音识别技术,实现一个能够通过语音进行控制的机器人。
通过麦克风获取语音输入,在ROS中进行语音识别,然后根据识别结果执行相应的控制命令,实现机器人的语音控制功能。
6. 机器人物体抓取:利用ROS和机械臂控制算法,实现一个能够自主抓取物体的机器人。
通过深度摄像头获取物体的三维信息,在ROS中进行目标检测和位置估计,然后使用机械臂控制算法控制机械臂进行抓取动作。
7. 机器人编队控制:利用ROS和无线通信技术,实现一个能够实现编队控制的多机器人系统。
通过ROS中的通信机制,实现多个机器人之间的数据传输和协调,实现编队控制算法,使机器人能够协同工作完成任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、安装ROS除了自己学习和测试用ROS外,最好还是单独用一台机器,相信这也不用多说,安装的时候要注意的是硬盘一定要接在IDE0上面,并且作为主盘MASTER,光驱随便,很多安装之后不能正常启动的都是这个问题、用安装光盘启动后,如图1图1选择 i 进入安装界面选择需要安装的package,图2图2选择完后,再按i安装,y确定,再按n不保存旧配置。
最后回车重新启动,这时进入ROS 是未注册的版本,如图4图4用光驱启动,在启动菜单按c破解,图5图5破解之后进入已经没有了未注册提示。
见图6 图32、服务端配置/interface pri 能显示出你现在可用的网卡。
如图6图6/ip addressadd address=192.168.1.1/24 interface=ether1设置ether1为内网IP,其中192.168.1.1/24添自己的内网IP ,设置成功没有提示,可以用pri查看见图7图73、winbox配置(所有配置都在这里进行)在局域网其他机器IE浏览器192.168.1.1 进入WEBBOX,左边可以下载WINBOX,当然如果你已经有WINBOX可以省略这步。
打开WINBOX输入IP和用户名连接(图8)图8进入配置界面(1)点左侧INTERFACE,双击ether1将name改为lan,同样将另两个改为cnc和tel。
图9 图9(2)左侧IP->ADDRESS ,+号,分别设置CNC和TEL的IP地址,添网通和电信给的IP/子网掩码(不要和我的一样...),红*部分是自动添加的.图10图10(3)IP->ROUTE,+号添加默认的网关,默认网通就添网通网关,默认电信就添电信的网关,这里默认电信.如图11,正常下黑圈处为AS,黄圈出为ment设注释为tel图11(4)IP->FIREWALL,NAT选项卡,+号添加chain:srcnat,src.addr:192.168.1.0/24,ACTION选项卡里为masquerade.OK,现在可以通过电信上网了.图12图12(5) 上传路由表文件cnc.rsc,如图13 图13在WINBOX中,NEW TERMINAL,输入import cnc完成.如图14 图14现在已经可以电信网通自动切换了.(6)只是切换也不太安全,一定要配制一下防火墙么,同5一样,上传防火墙的RSC文件到192.16 8.1.1,在NEW TERMINAL里执行import firewall,整体和第5步相近.(7)配置的差不多了,该改管理员账号了,左侧USERS,双击ADMIN改个名字和右下脚的password,如果不需要远程修改ROS的话,可以设定访问IP,192.168.1.0/24之类的~~~图16至此,基本OK了.第一次写教程用了2个多小时呵呵..有什么不完整的地方欢迎大家补充,大家可以从本站下载R OS 2.9.6破解版。
也可以直接找我,QQ:229200669ros软路由===================================================================== ===将该硬盘挂在要做路由电脑上,注意必须接在第一个IDE并且是主硬盘接口。
插上一张网卡,这是接内网的LAN。
开机,出现登陆提示。
用户:admin 密码:空输入setup再按两次A在ether1后面输入你的内网IP,如:192.168.0.254/24 (这里/24是24位掩码,与255. 255.255.0算法一样)输入完ip后,按两次x退出,现在可以可以ping通192.168.0.254了,也可用winbox在图形界面下访问路由了。
关机,插上另一张网卡,这个是接外网的,即WAN,现在可以去掉软路由电脑的显示器和键盘了。
开机,运行winbox以admin身份登陆添加外网网卡。
在ip---address里按+,address输入你的外网ip和掩码位,比如218.56.37.11/29。
network和BROADCAST不填,INTERFACE里选择ethr2增加外网网关。
ip-routes按+,Destination用默认的0.0.0.0/0 ,Gateway输入外网网关,比如218.56.37.10实现NAT转发:IP-FIREWALL在NAT里点+,在ACTION里选masquerade现在该路由已经做好雏形,可以正常上网了。
ROS菜单含义guanlianinterfaces---网络接口wireless---无线网络bridge---桥接ppp-虚拟拨号ipports--端口queues-限速drivers-设备systemfiles-文件备份/恢复log--系统日志snmp-snmp管理方式users-用户radius-radius管理tools-工具new terminal-命令方式telnet--tlenet连接方式password--修改密码certificate---证书哎,盗版madk supout.rif 制作rif文件manual--说明isdn chanels--一线通方式routing--路由exit--退出ip addr add addr=192.168.1.1/24 interface=ether1ip addr add addr=58.213.126.58/30 interface=ether2ip route add gateway=58.213.126.57外网ip firewall nat add chain=srcnat src-address=192.168.1.0/24 action=ma squerade222.190.124.46218。
94。
132。
50天之骄傲ipipipiipipipipipipipipipipipsys reset__________________________________addresses--ip地址routers-路由表pool-地址池arp-帮定ipvrrp-热备份firewall-防火墙socks-代理upnp-自动端口映射traffic flow-网络流量accounting--合计services--服务packing-ros模块neighbors--邻居ros用户dns--proxy-代理dhcp client-dhcp客户端dhcp server - dhcp服务dhcp relay-dhcp转换hospot-热点认证telephony-电话ipsec-ip隧道连接方式web proxy web代理system system system system system system--------------------------------------------- identity---ros标示clock-时间resources-系统配置license-注册信息packages--安装包auto upgrade-自动升级logging--日志history--历史日志console---com控制台scripts--脚本scheduler--进程watchdog--监视狗reboot-从起shutdown-关机lcd-小液晶显示ros消息ntp chient--ros时间客户端ntp server---ros时间服务端自动更新ros时间health---ros情况ups-ups电源,可持续电源,就是电瓶。
汗~tools tools tools tools tools tools--------------------------------------pingmacping 探测mac地址traceroute---Tracert命令bandwidth test-宽带测试btest server--btest服务器traffic monitor--数据报监视器packet sniffer--数据报扫描torch--察看客户机信息mac server mac 服务器graphing---曲线图ip sacan--ip扫描ping speed--ping 速度flood ping --ping阻塞netwatch--网络监视===================================================================== ===========Router OS 配置手册(网吧)一初始安装1 启动后,用用户名:admin 密码空登入1运行Setup2选a ,配制ip和网关3再选a 添加一个IP地址,这时会询问你哪一个接口,一般是直接回车,再输入一个IP 和子网掩码4现在可以用routerOS自带的专用工具进行设置了.打开IE 输入地址:http://内网IP5下载左上方的mikrotik winbox consle,输入地址,用户名,密码登入6先在interface 中把两个接口改名 wan 和lan 便于辨认,原来的wan 口是灰色的,打上勾启动起来。
7选IP ---address 点+号添加一个Ip,子网掩码用10进制,比如255.255.255.252就是3 0 (30个1),接口选wan8 选IP ----Router 点+号添加个路由,在gateway 中输外网网关9选IP ---Firewall,在source NAT 中加入内网网段,在general 的src address 中输内网网段,多个网段可加多个在Action 中选 masquerade ,意思是IP伪装。
到这已经可以正常上网了。
10端口映射在IP---firewall---destinationNAT general 的 dst address 输外网IP 掩码32 端口协议。
在Action 中输内网ip 端口, action 选 nat11防火墙的设置在 ip –firewall ---Filter rule 中,有intup (入口) forward (转发) output (出口),网吧一般设置input 和forward就可以了比如封掉445端口,协议tcp 和udp 都要做,input 和forward 都要做,action 选drop 就是丢弃限制bt 下载,在advanced –p2p 中选 bit-torrent ,里面还有其他的p2p软件,看情况设,梦幻西游用的是里面的kazaa限制下载速度在queues –simple queue ,比如限制ip 为192.168.0.5的机器的下载速度为128k-256k 上传为56k-128k最后别忘了设置密码:。