ABBPLC指令手册
Abb plc说明

SHAGAPLATE
2022/2/22
Database abbreviation list General
Shortform Clp Clr Cls Cmd/Cd Cnc Cnt Co CobPu Coi Coipe Col Comb Comp Con Cont Cop Cos Cov Cpl Cpu Cr Crol Crof Cron Cry Cs Ct Ctl Cur Cyc Cyd Cyl Dat Dbr Dch Dcu Dec Def Del Dens Det Dev Dia Dig Dir Dis Dist Div Dlv
SHAGAPLATE
2022/2/22
Database abbreviation list General
Shortform Dmp DoBd Dr Dra Drv Ds Dsap Dsc DSel Dsp Dsr Dv Dwn Dyt E EBal Ed EdMrk Eds Egd EI Emp Emup En End Eng Eos Er ERel Es ESct ESgd Eshf EStp Estrp EsTt Eva Ewr Ewrc Exi Exp Expd Ext Fa Fan Fb Fbo Fbwd Feed
Name collapse clear close slow comand Conect Content Coiler Cobble pusher Coil Coil peeler Cooling Combination Compressor Contactor continue Crop optimization system Consistent Conveyor Complete CPU Cradle rolls Clamping Roll Carry Off Device Carry On Device Carry Crop Shear cut control current Cycle Coil yard Cylinder Data Dummy bar rolling Discharge Dc unit decrease(d) defect delivery density detect(ed) deviation diameter Digit direction disable(d) Distribution Divide deliver
(2024年)AC800M编程手册中文版

30
技术创新方向探讨
人工智能与机器学习技术在 AC800M中的应用;
虚拟现实技术在AC800M培 训与模拟操作中的应用;
2024/3/26
工业物联网与云计算技术与 AC800M的融合发展;
安全性与可靠性的进一步提 升措施。
31
培训资源推荐
官方培训课程与教材
8
AC800M硬件组成
中央处理单元(CPU)
负责执行程序指令,处理数据和控制整个系统运作。
存储器(Memory)
用于存储程序和数据,包括随机存取存储器(RAM)和只读存储器(ROM)。
输入/输出(I/O)模块
负责与外部设备进行数据交换,包括数字量输入/输出、模拟量输入/输出等。
通讯接口
支持多种通讯协议,实现与其他设备或系统的数据交换。
关注软件版本更新情况,及时升级以获得更好的 性能和稳定性。
27
06
总结回顾与未来发展趋势预测
2024/3/26
28
关键知识件结构、软件功能、通信接 口等;
编程环境与工具
CodeSys开发环境、编程语言及 调试工具等;
2024/3/26
故障诊断与安全保护
系统故障诊断方法、安全保护措施 等。
2024/3/26
6
安全性与可靠性考虑
AC800M系统在设计时充 分考虑了安全性和可靠性 问题
2024/3/26
对程序进行严格的测试和 验证,确保程序的正确性 和稳定性
采用多种安全保护措施, 如访问控制、数据加密等
提供完善的故障诊断和恢 复机制,确保系统的连续 运行
7
02
硬件结构与接口技术
2024/3/26
ABB AC500系列PLC指令与功能块手册

技术资料ABB AC500系列PLC指令与功能块手册前言AC500是ABB公司推出的一款可升级的和灵活的自动化控制系统,可完美地满足客户需求。
此系统采用了底板上组合模块的结构, 包括多种CPU模块、通信接口模块、I/O模块及特殊功能模块等。
同时,ABB公司还推出了功能强大的PS501编程软件及丰富的指令系统。
AC500系列PLC可为不同工业领域的用户提供个性化的解决方案,适用于逻辑控制、顺序控制、过程控制和传动控制等领域。
我们已尽全力保证该文件的正确性和完整性。
但是,不可能有绝对没错的文件,因而欢迎您随时向我们提出宝贵的意见和建议。
如何使用本手册如果已经熟练掌握PS501编程软件,直接通过目录查找需要的指令。
如果刚刚开始学习PS501编程软件,建议阅读“第1章 AC500 PLC指令概述”。
如果对PLC所使用的操作数与数据类型不是很了解,建议阅读第2、3章。
附录包含指令速查表、IEC标准指令表、指令关联冲突速查表。
目录1.指令系统概述 (2)1.1 指令的定义与分类 (2)1.2 指令库的定义与分类 (9)1.2.1 基本指令库 (9)1.2.2 扩展指令库 (9)1.3指令库的添加 (9)1.4 指令系统使用注意事项 (9)2.操作数 (2)2.1常数 (2)2.1.1 BOOL常数 (9)2.1.2 TIME常数 (9)2.1.3 DATA常数 (9)2.1.4 TIME_OF_DAY常数 (9)2.1.5 DATE_AND_TIME常数 (9)2.1.6 数值常数 (9)2.1.7 REAL/LREAL常数 (9)2.1.8 STRING常数 (9)2.1.9类型符 (9)2.2 变量 (9)2.2.1 变量 (9)2.2.2 地址 (9)2.2.3 存取数组、结构和POU变量 (9)2.2.4 变量的位寻址 (9)2.2.5 功能 (9)3.数据类型 (2)3.1 标准数据类型 (2)3.1.1 布尔型数据类型 (2)3.1.2 整型数据类型 (2)3.1.3 实型数据类型REAL/LREAL (2)3.1.6 时间常数 (2)3.2 用户数据类型 (2)3.2.1 数组 (2)3.2.2 指针 (2)3.2.3 枚举(ENUM) (2)3.2.4 结构(STRUCT) (2)3.2.5 参考类型(别名) (2)3.2.6 子范围类型 (2)4.基本指令 (2)4.1 算术运算指令 (2)4.1.1 ADD—加法指令 (9)4.1.2 MUL—乘法指令 (9)4.1.3 SUB—减法指令 (9)4.1.4 DIV—除法指令 (9)4.1.5 MOD—取余指令 (9)4.2 赋值指令(MOVE) (2)4.3逻辑运算指令 (2)4.3.1 AND—与指令 (9)4.3.2 OR—或指令 (9)4.3.3 XOR—异或指令 (9)4.3.4 NOT—取非指令 (9)4.4移位指令 (2)4.4.1 SHL—左移指令 (9)4.4.2 SHR—右移指令 (9)4.4.3 ROL—循环左移指令 (9)4.4.4 ROR—循环右移指令 (9)4.5选择指令 (2)4.5.1 SEL—二选一指令 (9)4.5.2 MAX—取最大值指令 (9)4.5.5 MUX—多选一指令 (9)4.6比较指令 (2)4.6.1 GT—大于指令 (9)4.6.2 LT—小于指令 (9)4.6.3 GE—大于等于指令 (9)4.6.4 LE—小于等于指令 (9)4.6.5 EQ—等于指令 (9)4.6.6 NE—不等于指令 (9)4.7数据类型转换指令 (2)4.7.1 BOOL_TO_<TYPE>—布尔类型转换指令 (9)4.7.2 BYTE_TO_<TYPE>—字节类型转换指令 (9)4.7.3 WORD_TO_<TYPE>—字类型转换指令 (9)4.7.4 DWORD_TO_<TYPE>—双字类型转换指令 (9)4.7.5 SINT_TO_<TYPE>—单整型转换指令 (9)4.7.6 USINT_TO_<TYPE>—无符号单整型转换指令 (9)4.7.7 INT_TO_<TYPE>—整数类型转换指令 (9)4.7.8 UINT_TO_<TYPE>—无符号整数类型转换指令 (9)4.7.9 DINT_TO_<TYPE>—双整数类型转换指令 (9)4.7.10 UDINT_TO_<TYPE>—无符号双整数类型转换指令 (9)4.7.11 REAL_TO_<TYPE>—实数类型转换指令 (9)4.7.12 TIME_TO_<TYPE>—时间类型转换指令 (9)4.7.13 DATE_TO_<TYPE>—日期类型转换指令 (9)4.7.14 DT_TO_<TYPE>—日期时间类型转换指令 (9)4.7.15 TOD_TO_<TYPE>—时间类型转换指令 (9)4.7.16 STRING_TO_<TYPE>—字符类型转换指令 (9)4.7.17 TRUNC—截短转换指令 (9)4.8初等数学运算指令 (2)4.8.1 ABS—绝对值指令 (9)4.8.2 SQRT—平方根指令 (9)4.8.5 EXP—指数指令 (9)4.8.6 SIN—正弦指令 (9)4.8.7 COS—余弦指令 (9)4.8.8 TAN—正切指令 (9)4.8.9 ASIN—反正弦指令 (9)4.8.10 ACOS—反余弦指令 (9)4.8.11 ATAN—反正切指令 (9)4.8.12 EXPT—幂指令 (9)4.9地址运算指令 (2)4.9.1 ADR—取地址指令 (9)4.9.2 ^—取地址内容指令 (9)4.9.3 BITADR—位地址指令 (9)4.9.4 INDEXOF—索引指令 (9)4.9.5 SIZEOF—数据类型大小指令 (9)4.10调用指令(CAL) (2)4.11初始化操作指令(INI) (2)4.12 字符串处理指令(Standard.lib) (2)4.12.1 CONCAT—合并字符串指令 (9)4.12.2 DELETE—删除字符指令 (9)4.12.3 FIND—查找字符串指令 (9)4.12.4 INSERT—插入字符串指令 (9)4.12.5 LEFT—左边取字符串指令 (9)4.12.6 LEN—取字符串长度指令 (9)4.12.7 MID—中间取字符串指令 (9)4.12.8 REPLACE—替换字符串指令 (9)4.12.9 RIGHT—右边取字符串指令 (9)4.13 库版本信息检查指令(Util.lib) (2)4.14 BCD码转换指令(Util.lib) (2)4.14.1 BCD_TO_INT—BCD码转整型指令 (9)4.15.1 EXTRACT—位提取指令 (9)4.15.2 PACK—位整合指令 (9)4.15.3 PUTBIT—位赋值指令 (9)4.15.4 UNPACK—位拆分指令 (9)4.16 高等数学运算指令(Util.lib) (2)4.16.1 DERIVATIVE—微分 (9)4.16.2 INTEGRAL—积分 (9)4.16.3 STATISTICS_INT—整型统计 (9)4.16.4 STATISTICS_REAL—实型统计 (9)4.16.5 VARIANCE—平方偏差 (9)4.17 控制器指令(Util.lib) (2)4.17.1 PD—比例微分控制器 (9)4.17.2 PID—比例积分微分控制器 (9)4.17.3 PID_FIXCYCLE—比例积分微分控制器 (9)4.18 信号发生器指令(Util.lib) (2)4.18.1 BLINK—脉冲信号发生器 (9)4.18.2 GEN—典型周期信号发生器 (9)4.19 函数操纵器指令(Util.lib) (2)4.19.1 CHARCURVE—特征曲线 (9)4.19.2 RAMP_INT—整型限速 (9)4.19.3 RAMP_REAL—实型限速 (9)4.20 模拟量处理指令(Util.lib) (2)4.20.1 HYSTERESIS—滞后 (9)4.20.2 LIMITALARM—上下限报警 (9)4.21 双稳态指令(Standard.lib) (2)4.21.1 SR—置位优先双稳态器 (9)4.21.2 RS—复位优先双稳态器 (9)4.22 触发器指令(Standard.lib) (2)4.22.1 R_TRIG—上升沿检测触发器 (9)4.23.1 CTU—递增计数器 (9)4.23.2 CTD—递减计数器 (9)4.23.3 CTUD—递增递减计数器 (9)4.24 定时器(Standard.lib) (2)4.24.1 TP—普通定时器 (9)4.24.2 TON—通电延时定时器 (9)4.24.3 TOF—断电延时定时器 (9)4.24.4 RTC—实时时钟 (9)5.AC500扩展指令 (2)5.1 外部系统库 (2)5.1.1 BATT—读取电池状况 (9)5.1.2 CLOCK—显示及校正时钟 (9)5.1.3 CLOCK_DT—以“DT”格式显示及校正时钟 (9)5.2 内部系统库 (2)5.2.1 CPU_INFO—读取CPU类型 (9)5.2.2 DIAG_ACK—确认一个错误 (9)5.2.3 DIAG_ACK_ALL—确认一个错误类别的所有错误 (9)5.2.4 DIAG_EVENT—生成一个错误事件 (9)5.2.5 DIAG_GET—读取错误 (9)5.2.6 DIAG_INFO—显示对所有还未被读取的错误的观察 (9)5.2.7 FLASH_DEL—删除闪存中的一个数据段 (9)5.2.8 FLASH_READ—从闪存中读取一个数据段 (9)5.2.9 FLASH_WRITE—将一个数据段写到闪存中 (9)5.2.10 IO_DIAG—读取I/O总线的诊断数据 (9)5.2.11 IO_INFO—读取连到I/O总线的设备的数量 (9)5.2.12 IO_MODULE_DIAG—读取I/O总线的模块诊断数据 (9)5.2.13 IO_VERSION—读取I/O总线驱动的版本 (9)5.2.14 RTS_INFO—读取CPU实时系统的版本 (9)5.2.15 SD_READ—从SD卡读取一个数据段 (9)5.2.17 SLOT_INFO—读取插槽信息 (9)5.2.18 SYS_TIME—读取系统时间 (9)5.3 Modbus库 (2)5.3.1 COM_MOD_MAST—处理Modbus主机报文 (9)5.4 ASCII通信库 (2)5.4.1 COM_REC—通过一个“自由模式”的串行接口接收数据 (9)5.4.2 COM_SEND—通过一个“自由模式”的串行接口发送数据 (9)5.5 Ethernet库 (2)5.5.1 ETH_MOD_INFO—从OpenModbus中读取关于TCP/IP处理的状态信息 (9)5.5.2 ETH_MOD_MAST—在TCP/IP客户端(主机)报文上处理OpenModbus (9)5.5.3 ETH_OWN_IP—输出自已的IP地址 (9)5.5.4 ETH_UDP_INFO—从UDP/IP处理中读取状态信息 (9)5.5.5 ETH_UDP_REC—从UDP/IP接收缓存中读取一个数据包 (9)5.5.6 ETH_UDP_SEND—通过以太网UDP/IP发送一个数据包到一个工作站 (9)5.5.7 ETH_UDP_STO—从超时数据缓存读取以太网UDP/IP超时数据包 (9)5.5.8 IP_ADR_DWORD_TO_STRING—IP地址的格式转化 (9)5.5.9 IP_ADR_STRING_TO_DWORD—IP地址的格式转化 (9)5.6 PROFIBUS库 (2)5.6.1 DPM_CTRL—将全局控制指令发送到DP从机 (9)5.6.2 DPM_READ_INPUT—读取从机的输入数据,该从机没被指派给主机 (9)5.6.3 DPM_READ_OUTPUT—读取从机的输出数据,该从机没被指派给主机 (9)5.6.4 DPM_SET_PRM—将用户参数发送到DP从机 (9)5.6.5 DPM_SLV_DIAG—获得DP从机的详细诊断数据 (9)5.6.6 DPM_STAT—读出PROFIBUS通讯模块的状态 (9)5.6.7 DPM_SYS_DIAG—读出所有DP从机的状态概述 (9)5.6.8 DPV1_MSAC1_READ—从DPV1从机读取一个数据块 (9)5.6.9 DPV1_MSAC1_WRITE—将一个数据块写到DPV1从机 (9)6. 编程方式附录 (2)1A C500指令速查表 (2)第1章指令系统概述ABB公司AC500系列PLC为用户提供了丰富的指令,这些指令均可通过编程软件PS501进行调用,操作简单,使用方便。
ABB常用指令、程序数据.
常用指令
通信指令(人机对话)-TPErase TPErase;
示教器显示屏清屏指令
2016年12月31日
25
程序编写及程序结构介绍
常用指令
通信指令(人机对话)-TPWrite TPWrite string;
string:显示屏显示的字符串。(string) 在示教器显示屏上显示字符串数据﹐也可以 用”xxxxxx”形式直接定义字符串﹐每个写屏指令 最多显示80个字符
MoveC p1,p2,v100,z10,tool0
中间位置 数据类型: robottarget 目标位置 数据类型: robottarget 转弯区尺寸 单位: mm 数据类型:zonedata
2016年12月31日
11
程序编写及程序结构介绍
常用指令 基本运动指令—参变量 光标指在当前指令时﹐按功能键OptArg • [\Conc] 协作运动。机器人未移动到目标点﹐已经开始执 行下指令(主要用于需要计算的指令) • [\ToPoint] 在采用新指令时﹐目标点自动生成 • [\V] 定义速度mm/s
Flash Disk 快速硬盤 hd0a:\
例行程序
2016年12月31日
DATA 數據
Rputine Routine 例行程序 例行程序 Rputine 例行程序 Rputine
Floppy Disk 3.5"軟盤 flp1:\
例行程序
5
程序编写及程序结构介绍
程序简介 定义: 用RAPID语言编写的指令和数据组成﹐这些以某 一特定的方式控制着机器人和外围的设备的语言 的集合 程序组成 通常程序由三个不同的部份组成: 一段主程序 几个子程序 程序数据 (见下图) 6 2016除此之外﹐程序的储存器还包括有系统模块 年12月31日
ABB全部编程指令详解
1.程序的调用2.例行程序内的逻辑控制3.停止程序执行8.3.2变量指令1.赋值指令2.等待指令3.程序注释4.程序模块加载5.变量功能6.转换功能8.3.3运动设定1.速度设定2.轴配置管理3.奇异点的管理4.位置偏置功能5.软伺服功能6.机器人参数调整功能7.空间监控管理8.3.4运动控制1.机器人运动控制2.搜索功能3.指定位置触发信号与中断功能4.出错或中断时的运动控制*这些功能需要选项“Path recovery”配合5.外轴的控制6.独立轴控制注:这些功能需要选项“Independent movement”配合7.路径修正功能注:这些功能需要选项“Path offset or RobotWare-Are sensor”配合8.路径记录功能注:这些功能需要选项“Path recovery”配合9.输送链跟踪功能注:这些功能需要选项“Conveyor tracking”配合10.传感器同步功能注:这些功能需要选项“Sensor synchronization”配合11.有效载荷与碰撞检测注:此功能需要选项“Collision detection”配合12.关于位置的功能8.3.5输入输出信号的处理1.对输入输出信号的值进行设定2.读取输入输出信号值3.IO模块的控制8.3.6通信功能1.示教器上人机界面的功能2.通过串口进行读写3.Socket通信8.3.7中断程序1.中断设定2.中断的控制8.3.8系统相关的指令1.时间控制8.3.9数学运算1.简单运算2.算术功能。
ABB全部编程指令详解.pdf

1.程序的调用2.例行程序内的逻辑控制3.停止程序执行8.3.2变量指令1.赋值指令2.等待指令3.程序注释4.程序模块加载5.变量功能6.转换功能8.3.3运动设定1.速度设定2.轴配置管理3.奇异点的管理4.位置偏置功能5.软伺服功能6.机器人参数调整功能7.空间监控管理8.3.4运动控制1.机器人运动控制2.搜索功能3.指定位置触发信号与中断功能4.出错或中断时的运动控制*这些功能需要选项“Path recovery”配合5.外轴的控制6.独立轴控制注:这些功能需要选项“Independent movement”配合7.路径修正功能注:这些功能需要选项“Path offset or RobotWare-Are sensor”配合8.路径记录功能注:这些功能需要选项“Path recovery”配合9.输送链跟踪功能注:这些功能需要选项“Conveyor tracking”配合10.传感器同步功能注:这些功能需要选项“Sensor synchronization”配合11.有效载荷与碰撞检测注:此功能需要选项“Collision detection”配合12.关于位置的功能8.3.5输入输出信号的处理1.对输入输出信号的值进行设定2.读取输入输出信号值3.IO模块的控制8.3.6通信功能1.示教器上人机界面的功能2.通过串口进行读写3.Socket通信8.3.7中断程序1.中断设定2.中断的控制8.3.8系统相关的指令1.时间控制8.3.9数学运算1.简单运算2.算术功能。
ABB全部编程指令详解
8.3.2 变量指令 1. 赋值指令 指令 := 2. 等待指令 指令 WaitTime WaitUntil 说明 等待一个指定的时间,程序再往下执行 等待一个条件满足后,程序继续往下执行 对程序数据进行赋值 说明
WaitDI WaitDO 3. 程序注释 指令 comment 4. 程序模块加载 指令 Load UnLoad Start Load Wait Load CancelLoad CheckProgRef Save EraseModule 5. 变量功能 指令 TryInt OpMode RunMode NonMotionMode Dim Present IsPers IsVar 6. 转换功能 指令 StrToByte ByteToStr
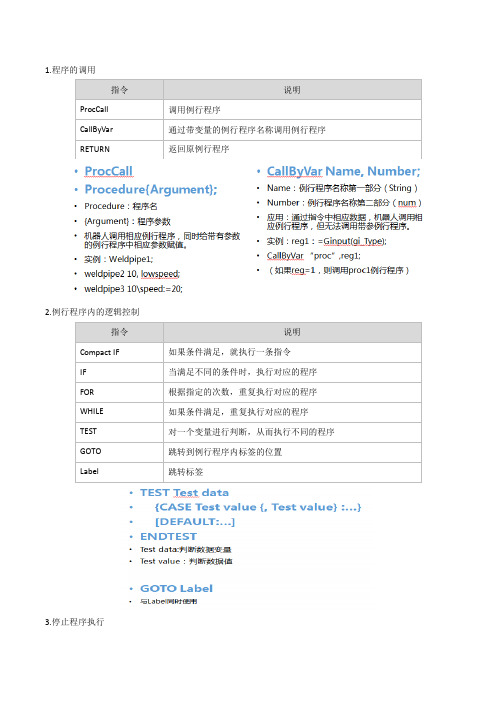
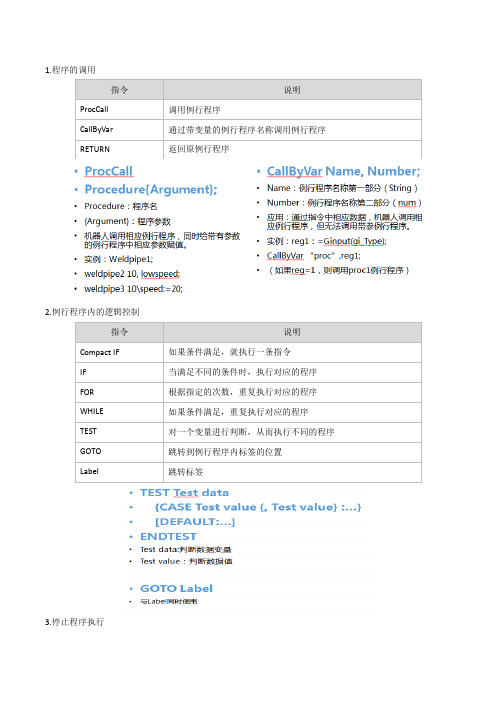
1. 程序的调用 指令 ProcCall CallByVar RETURN 调用例行程序 通过带变量的例行程序名称调用例行程序 返回原例行程序 说明
2. 例行程序内的逻辑控制 指令 Compact IF IF FOR WHILE TEST GOTO Label 说明 如果条件满足,就执行一条指令 当满足不同的条件时,执行对应的程序 根据指定的次数,重复执行对应的程序 如果条件满足,重复执行对应的程序 对一个变量进行判断,从而执行不同的程序 跳转到例行程序内标签的位置 跳转标签
2. 搜索功能 指令 SearchC SearchL SearchExtJ 3. 指定位置触发信号与中断功能 指令 TriggIO TriggInt TriggCheckIO TriggEquip 说明 定义触发条件在一个指定的位置触发输出信号 定义触发条件在一个指定的位置触发中断程序 定义一个指定的位置进行 I/O 状态的检查 定义触发条件在一个指定的位置触发输出信号,并对信号响应的 延迟进行补偿设定 TriggRampAO 定义触发条件在一个指定的位置触发模拟信号,并对信号响应的 延迟进行补偿设定 TriggC TriggJ 带触发事件的圆弧运动 带触发事件的关节运动 TCP 圆弧搜索运动 TCP 线性搜索运动 外轴搜索运动 说明
ABB指令集及作用
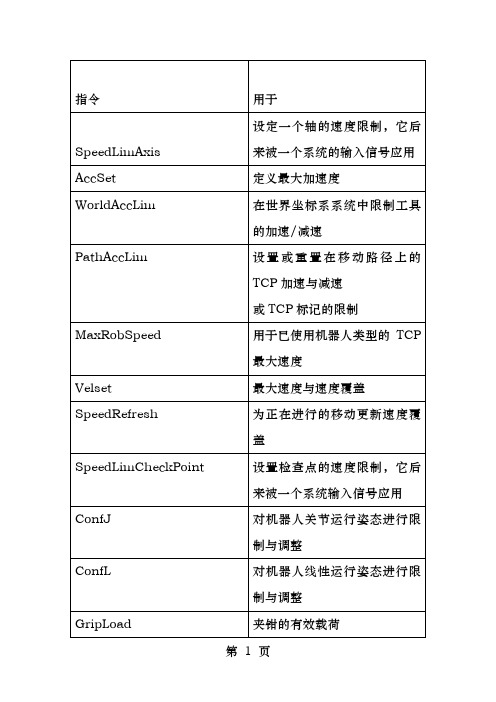
DitherDeact
软伺服器的禁用功能
TuneServo
机器人调优值
TuneReset
重置调整正常
Pathpegol
调整几何路径
CirPathMode
选择工具重新定位的在圆弧中插入
Tunetype
将调优类型表示为一个符号常量
WZBoxDef
定义一个立体矩形的全局区域
WZCylDef
定义一个圆柱体全局区域
SetAO
改变模拟输出信号的值
SetDO
改变数字输出信号的值(例如high/low)
SetGO
改变一组数字输出信号的值
AOutput
读取模拟输出信号的当前值
DOutput
读取数字输出信号的当前值
GOutput
读取数字输出信号组的当前值
GOutputDnum
读取一组数字输出信号的当前值。能够处理高达32位的数字组信号。返回dnum数据类型中的读值。
Searching
寻位运动,机器人在运动过程中搜索位置并通过计算得出程序偏移
SearchC
TCP沿着圆形路径移动
SearchL
TCP沿着线性路径移动
SearchExtJ
没有TCP的关节联合运动
TriggIO
定义一个触发条件,并在特定位置输出
TriggInt
定义一个触发条件,并在给定的位置执行一个陷阱程序
WZSphDef
定义一个球形全局区域
WZHomeJointDef
定义在关节坐标下一个全局区域
WZLimJointDef
在关节坐标下定义一个区域,以限制工作区域
WZLimSup
为一个全局区域激活限制