基于高精度GPS定位技术的驾考系统DrivingTest(精)
驾考系统升级一般多长时间
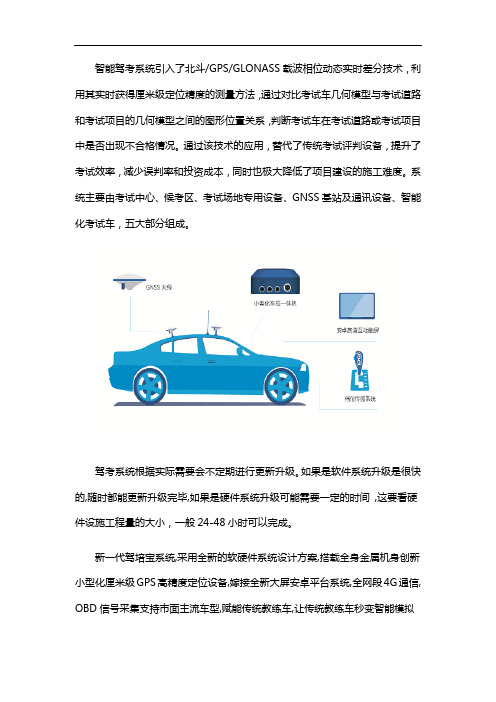
智能驾考系统引入了北斗/GPS/GLONASS载波相位动态实时差分技术,利用其实时获得厘米级定位精度的测量方法,通过对比考试车几何模型与考试道路和考试项目的几何模型之间的图形位置关系,判断考试车在考试道路或考试项目中是否出现不合格情况。
通过该技术的应用,替代了传统考试评判设备,提升了考试效率,减少误判率和投资成本,同时也极大降低了项目建设的施工难度。
系统主要由考试中心、候考区、考试场地专用设备、GNSS基站及通讯设备、智能化考试车,五大部分组成。
驾考系统根据实际需要会不定期进行更新升级。
如果是软件系统升级是很快的,随时都能更新升级完毕,如果是硬件系统升级可能需要一定的时间,这要看硬件设施工程量的大小,一般24-48小时可以完成。
新一代驾培宝系统,采用全新的软硬件系统设计方案,搭载全身金属机身创新小型化厘米级GPS高精度定位设备,嫁接全新大屏安卓平台系统,全网段4G通信, OBD信号采集支持市面主流车型,赋能传统教练车,让传统教练车秒变智能模拟
考试车。
驾培宝模拟考试功能具备最新的驾考规则,同时具有微信扫码收费、学车视频免费学习、微信练车分析推送、后台练车数据监控等强大功能。
海积信息是卫星导航产品及解决方案提供商,全面满足各行业对于位置应用”高精度、舸靠、舸用”的需求,己在智能驾驶、智慧物流、形变监测、工程管理、机械控制、民航场站、智慧港口、驾考驾培等民用领域得以广泛应用。
汽车智能驾驶辅助系统校准考核试卷

B.车道保持辅助
C.自适应巡航
D.导航系统
8.以下哪个因素不会影响智能驾驶辅助系统的性能?()
A.环境光照
B.天气条件
C.车辆速度
D.车辆品牌
9.在智能驾驶辅助系统中,以下哪个部件负责控制车辆的方向盘和踏板?()
A.传感器
B.控制器
C.导航系统
D.数据融合系统
10.以下哪个技术主要用于实现自动驾驶车辆的远程监控?()
8.智能驾驶辅助系统中的自适应巡航控制(ACC)可根据______自动调整车速。()
9.为了提高智能驾驶辅助系统的环境适应能力,常采用______技术来融合多种传感器数据。()
10.智能驾驶辅助系统的发展目标是实现______,提高驾驶安全性和舒适性。()
四、判断题(本题共10小题,每题1分,共10分,正确的请在答题括号中画√,错误的画×)
汽车智能驾驶辅助系统校准考核试卷
考生姓名:__________答题日期:__________得分:__________判卷人:__________
一、单项选择题(本题共20小题,每小题1分,共20分,在每小题给出的四个选项中,只有一项是符合题目要求的)
1.汽车智能驾驶辅助系统主要包括以下哪些部分?()
6.所有级别的自动驾驶车辆都可以在无需人工干预的情况下进行长途驾驶。()
7.智能驾驶辅助系统在遇到紧急情况时,总是能够做出正确的决策。()
8. 5G通信技术对于智能驾驶辅助系统的发展至关重要。()
9.智能驾驶辅助系统中的车辆控制系统与驾驶员的操作完全独立。()
10.随着技术的不断发展,智能驾驶辅助系统将逐渐降低对驾驶员的依赖。()
A.系统故障
B.交通规则变化
机动车驾驶人考试系统通用技术条件第4部分道路驾驶技能考试系

机动车驾驶人考试系统通用技术条件第4部分道路驾驶技能考试系1范围本部分适用于大型客车、牵引车、城市公交车、中型客车、大型货车、小型汽车、小型自动挡汽车、低速载货汽车、残疾人专用小型自动挡载客汽车道路驾驶技能考试系统的设计、生产和使用。
2规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB1589道路车辆外廓尺寸、轴荷及质量限值GB7258机动车运行安全技术条件GB8702-1988电磁辐射防护规定GB/T18655-2022车辆、船和内燃机无线电骚扰特性用于保护车载接收机的限值和测量方法GA1026机动车驾驶人考试内容和方法GA1027-2022机动车驾驶人考试监管系统通用技术条件GA/T1028.1-2022机动车驾驶人考试系统通用技术条件第1部分:总则GA/T1028.2-2022机动车驾驶人考试系统通用技术条件第2部分:驾驶理论考试系统GA/T1028.3-2022机动车驾驶人考试系统通用技术条件第3部分:场地驾驶技能考试系统GA1029机动车驾驶人考试场地及其设施设置规范3术语和定义GA/T1028.1(机动车驾驶人考试系统通用技术条件第1部分:总则)界定的以及下列术语和定义适用于本文件。
3.1由道路驾驶技能考试系统自动采集、分析考试过程信息,对考生的驾驶技能,依据GA某某某某(机动车驾驶人考试内容和方法)进行的自动评判。
3.2考试员人工评判e某aminer’aement由考试员对考生的驾驶技能,依据GA某某某某(机动车驾驶人考试内容和方法)进行的评判。
4要求4.1一般要求4.1.1机动车驾驶人道路驾驶技能考试系统(以下简称路考系统)应符合GA1026中有关科目三道路驾驶技能部分的考试内容和评判要求。
4.1.2路考系统的软硬件设计应符合GA/T1028.1-2022中第5章的相关要求。
北斗GNSS产品在驾考驾培系统中的应用

北斗GNSS产品在驾考/驾培系统中的应用一、GNSS驾考/驾培系统背景近年来,为提高驾照考试质量,确保公平、公正,国家公安部发布了第91号令、第111号令、第123号令以及其它相关技术规范,对驾考系统和标准进提出了改进要求。
按照“简单实用,准确可靠”的原则,很多驾考系统集成商基于GNSS产品开发了科目二、科目三等智能考试系统,定位精度可达1cm,在实现精准评判的同时,这套系统也几乎将场地内的各种地埋传感器完全取代,大大降低了后期的场地维护难度和费用,提高了考试或训练场地的建设效率。
另外,这套智能考试系统的推广应用将实现机动车驾驶人考试工作由人工操作向计算机管理的转变,提高了了考试工作的透明度,减少了人为因素,体现了公开、公正、公平的原则。
随着GNSS驾考系统的推广应用,驾校培训系统也必须随之升级,以适应驾考需要,事实上,相比较而言,驾培系统的应用更为广泛,市场更大,因此,推出智能驾培系统具有广泛的社会效益和经济效益。
全球卫星定位系统可以实现实时高精度定位,其实时定位精度可达±1cm,实时数据输出频率最大可达20Hz,是目前大范围高精度实时定位的理想选择。
GNSS定位系统由GNSS基准站、GNSS移动站、无线数传电台组成,系统具有如下几个优点:1.全天候作业:不受雨雪、大雾天气及光照条件等因素的影响,可实现全天24小时作业。
2.车载移动站和基准站之间无须通视,大大增加了系统应用的灵活性。
3.车载GNSS设备和基准站使用无线数传电台通讯,覆盖范围可达半径10公里以上,数据传输稳定可靠且保密性好。
4.定位精度及实时性高,定位精度在±1cm,RTK定位输出频率可达10Hz,原始数据可以达到20Hz。
二、方案介绍整个驾考/驾培系统大体上包括两大部分:硬件部分和软件部分,硬件部分包括GNSS设备、摄像头、无线网桥等各种车载传感器和信号传输设备,负责收集各种数据并传输,软件部分负责处理包括GNSS数据在内的各种传感信息,并分析计算,最终报出评判结果。
GPS北斗定位模式下的智能驾考驾培系统
GPS北斗定位模式下的智能驾考驾培系统一、行业背景随着导航卫星GPS(北斗)高精度定位技术的成熟,通过采用高精GPS定位的方式取代原有的驾校考试及评判模式,正在发挥着巨大的作用。
采用卫星导航评判系统的主要优势有:1、提高考试、训练效率由于整个系统维护量小,可以连续不间断发GPS/BD2,选择多个起点和终点、考试和训练同时进行2、培训方式灵活同一个项目上,可以培训不同车型,同一个场地上,可以培训不同项目,提高场地利用效率。
3、降低运营成本场地免维护、系统配件消耗少,管理成本低。
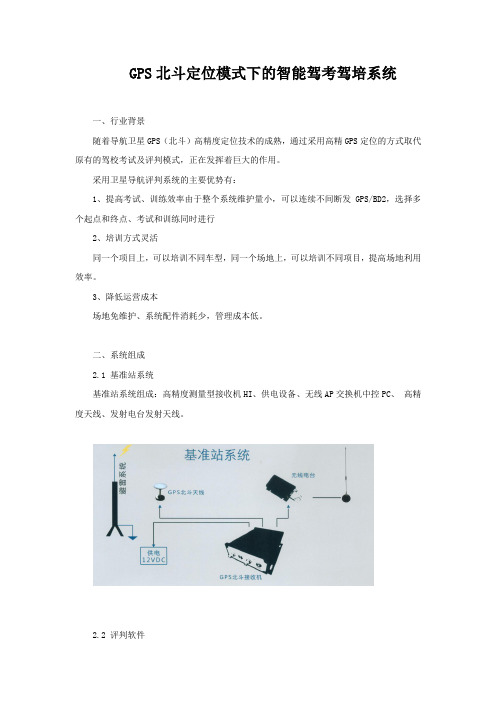
二、系统组成2.1 基准站系统基准站系统组成:高精度测量型接收机HI、供电设备、无线AP交换机中控PC、高精度天线、发射电台发射天线。
2.2 评判软件2.3 移动站系统移动站系统:1、数据采集定位模块2、车辆状态传感器3、天线4、通讯链路5、车载设备箱6、车载中控机三、系统应用优势3.1 科目二应用驾驶员考试的内容其实质就是自动检测车辆在考试场地的位置,判断车辆是否压线,司南导航拥有完全的驾考解决方案,其原理是:使用司南RTK产品给场地定位,标定出场地上每根线的位置,并给每个线附上属性,储存到评判软件内,再给考试车辆定位、定向,实时监测车辆的位置,并通过算法实时计算出车身特征点和车轮特征点位置,评判软件自动分析计算车辆是否压线。
3.2 科目三应用驾驶员考试系统,科目三考试为路考,原理与科目二类似,首先标定考试路段,给考试路段的每一条车道、每一条车道线、每一个路标对应的区域,每一个路口都测绘成图并附加相应的属性,储存到评判软件备用,再给车辆定位,根据车辆的航向角和定位数据计算车身和车轮特征点位置,评判软件判断车身所在的位置,判断考试是否合格。
机动车驾驶人考试系统通用技术条件第部分道路驾驶技能考试系统
机动车驾驶人考试系统通用技术条件第部分道路驾驶技能考试系统Credit is the best character, there is no one, so people should look at their character first.ICS 35.240 R 85 GA中华人民共和国公共安全行业标准 GA/T 1028.4—2017代替GA/T 1028.4-2012机动车驾驶人考试系统通用技术条件 第4部分:道路驾驶技能考试系统General technical specifications for driving test systems —Part 4: Road driving test system2017 - 07 - 03发布 2017 - 10- 01中华人民共和国公安部 发布目次前言 (II)1 范围...............................................................................2 规范性引用文件.....................................................................3 术语和定义.........................................................................4 要求 (1)5 试验方法 (7)6 检验规则 (10)7 标志、标签、包装 (10)附录A规范性附录计算机辅助评判考试项目 ..............................................前言GA/T 1028机动车驾驶人考试系统通用技术条件分为以下部分:——第1部分:总则;——第2部分:驾驶理论考试系统;——第3部分:场地驾驶技能考试系统;——第4部分:道路驾驶技能考试系统..……本部分为GA/T 1028的第4部分..本部分按照GB/T 1.1-2009给出的规则起草..本部分代替GA/T 1028.4-2012机动车驾驶人考试系统通用技术条件第4部分:道路驾驶技能考试系统;与GA/T 1028.4-2012相比;除编辑性修改外;主要技术变化如下:——修改了“一般要求”见4.1;2012年版的4.1;——增加了“电气部件”见4.4;——修改了“系统自检”见4.5.1;2012年版的4.4.13;——修改了“考试评判”见4.5.4;2012年版的4.4.3;——增加了“考试指令下达和结果告知”见4.5.5;——增加了“人机交互”见4.5.6;——修改了“考试过程管理和监控”见4.5.7;2012年版的4.4.6;——增加了“音视频监控”见4.5.8;——增加了“时间同步”见4.5.9;——增加了“行驶轨迹记录”见4.5.10;——修改了“考试信息传输”见4.5.11;2012年版的4.4.7;——删除了“考试信息存储”见2012年版的4.4.8;——删除了“考试信息管理”见2012年版的4.4.9;——修改了“数据安全管理”见4.5.12;2012年版的4.4.10;——修改了“查询、统计”见4.5.14;2012年版的4.4.12;——修改了“电源适应性”——修改了“计算机辅助评判考试项目”见附录A;2012年版的附录A..本部分由公安部道路交通管理标准化技术委员会提出并归口..本部分负责起草单位:公安部交通管理科学研究所..本部分参加起草单位:国家道路交通安全产品质量监督检验中心、武汉理工大学、南京多伦科技股份有限公司、安徽三联交通应用技术股份有限公司..本部分主要起草人:秦东炜、邹永良、胡新维、刘东波、高岩、吴超仲、吴业福、章安强、王征平、王江波..本部分所代替标准的历次版本发布情况为:——GA/T 1028.4-2012..机动车驾驶人考试系统通用技术条件第4部分:道路驾驶技能考试系统1 范围GA/T 1028的本部分规定了道路驾驶技能考试系统的要求、试验方法、检验规则、标志、标签和包装..本部分适用于大型客车、牵引车、城市公交车、中型客车、大型货车、小型汽车、小型自动挡汽车、低速载货汽车、残疾人专用小型自动挡载客汽车驾驶人的道路驾驶技能考试系统..2 规范性引用文件下列文件对于本文件的应用是必不可少的..凡是注日期的引用文件;仅注日期的版本适用于本文件..凡是不注日期的引用文件;其最新版本包括所有的修改单适用于本文件..GB 1589 汽车、挂车及汽车列车外廓尺寸、轴荷及质量限值GB 7258 机动车运行安全技术条件GB 8702 电磁环境控制限值GB/T 18655-2010 车辆、船和内燃机无线电骚扰特性用于保护车载接收机的限值和测量方法GA 1026 机动车驾驶人考试内容和方法GA 1027 机动车驾驶人考试监管系统通用技术条件GA/T 1028.1 机动车驾驶人考试系统通用技术条件第1部分:总则GA/T 1028.3-2017 机动车驾驶人考试系统通用技术条件第3部分:场地驾驶技能考试系统3 术语和定义GA/T 1028.1界定的以及下列术语和定义适用于本文件..计算机辅助评判 computer-aided assessment由道路驾驶技能考试系统自动采集、分析考试过程信息;对考生的驾驶技能;依据GA 1026进行的自动评判..人工评判 examiner’s assessment由考试员对考生的驾驶技能;依据GA 1026进行的评判..4 要求4.1 一般要求4.1.1 道路驾驶技能考试系统以下简称路考系统应支持按GA 1026中有关科目三道路驾驶技能部分的考试内容和评判要求进行考试和评判..4.1.2 路考系统应支持大型客车、牵引车、城市公交车、中型客车、大型货车考试车型的夜间考试..4.1.3 路考系统的软硬件设计应符合GA/T 1028.1的相关要求..4.1.4 路考系统车载设备应采用计算机或具有计算处理能力的嵌入式系统作为运行环境;使用标准硬件、通信、软件接口..4.1.5 路考系统通过车载设备采集、处理、发送、接收、存储考生的考试信息;通过控制中心设备对考试过程进行实时监视和控制..4.1.6 路考系统应支持考试信息的上传、下载和管理..4.1.7 考试车辆上加装设备的;不应破坏原车转向系、制动系等安全系统的性能;不应破坏原车电气系统;改装后的考试车辆安全性能应符合GB 7258的要求..4.1.8 加装设备应根据车辆的具体结构、尺寸等进行优化设计;确保改装完成后功能布局合理;使用、维修方便;承载平衡;外廓尺寸等符合GB 1589的要求..4.1.9 加装设备应符合相关产品标准和安全要求;满足车载使用环境要求;安装固定可靠;使用方便;并作安全防护、抗震、防雨、防尘等处置;在使用和车辆行驶过程中不发生变形、松动、异响..所有加装设备及其附件不应有任何可能使人致伤的尖锐凸出物..4.1.10 加装设备线缆布设应有线槽管保护;电源线、信号线应分开布设;布线应布局合理;捆扎整齐;走线标识齐全;车外应按照隐蔽、美观、防雨、密封的原则布线..4.2 组成路考系统由控制中心设备、车载设备等组成..4.3 外观各设备、部件外观应符合以下要求:a)外表面光洁、平整;不应有凹痕、划伤、裂缝、变形等缺陷;b)金属部件表面有防锈、防腐蚀处理;表面不应有锈蚀、起泡、龟裂、脱落和磨损现象;c)设备的开关、按钮、插座等处有文字或符号标志;接线端子处有对应的接线标注;d)各组成设备机壳外表面有清晰的铭牌;铭牌标明设备名称、编号、型号、制造企业名称、出厂日期等..4.4 电气部件4.4.1 电源4.4.1.1 使用交流电源供电的设备额定电压:AC 220V;50Hz或AC 380V;50Hz;使用直流电源供电的设备额定电压:DC 6V、DC 12V、DC 24V..4.4.1.2 控制中心计算机和服务器应有备用电源;使用备用电源时;正常工作时间应大于或等于10 min..4.4.1.3 车载设备在考试车辆熄火时;正常工作时间应大于或等于10 min..4.4.2 电气保护装置路考系统的交流电源主供电端应安装过载、漏电、短路等保护装置和防雷装置;应使用快速熔断器保护内部电路..4.4.3 接地端子4.4.3.1 控制中心设备和场地设备应设有专门的接地端子;接地端子与大地应有效连接..4.4.3.2 机箱、电路单元、电路单元固定支架、固定螺栓、承载AC 220V和AC 380V电压部件的外壳等金属零部件均应与接地端子连接并应保证各部件的接地连续性..4.4.3.3 防雷装置的接地线不应直接与接地端子连接;安装时应单独接入大地..接地母线应采用铜质线;且不应与强电的零线相接..4.4.4 导线4.4.4.1 导线应具备有效保护;保证导线不会接触到易引起导线绝缘部分损伤的部件;当导线需穿越金属孔时;金属穿线孔应进行倒角;不应有锋利的边缘;导线应装有护线套..4.4.4.2 所有接线应布置整齐并有效固定;线束内的导线应编扎牢固并明确标识;走线安排应保证任何接线总成的拆除不会影响到与该总成无关的线缆..4.5 功能4.5.1 系统自检4.5.1.1 路考系统开机时;应能进行自检;自检正常后应显示并进入运行状态;自检有问题时应有故障和报警提示..4.5.1.2 路考系统应具备在每次考试启用前对考试评判软件进行安全确认的功能..4.5.1.3 路考系统应对考试车辆模型和考试道路模型参数的合规性进行校验;校验结果不符的应不能开始考试..4.5.2 身份认证身份认证功能应符合GA/T 1028.1的要求..4.5.3 信息采集4.5.3.1 路考系统应能通过传感器、摄像头、拾音器等设备采集考生的操作动作和行为信息、考试车辆状态信息、车内音视频信息和车外视频信息..4.5.3.2 信息响应延时应符合以下要求:a)通过车辆电子线路获取信息的;信息响应延时小于或等于0.3 s;b)通过加装信息采集装置获取信息的;信息响应延时小于或等于0.5 s;c)采用摄像装置采集图像信息的;信息响应延时小于或等于0.5 s;d)采用卫星定位装置采集车辆位置信息的;车辆位置信息响应延时小于等于0.5 s..4.5.3.3 信息采集误差范围应符合以下要求:a)取得的发动机转速信息;误差范围为±50 r/min;b)取得的车辆行驶速度信息;误差范围为±3 km/h;c)取得的车辆位置定位信息;误差范围为±5 cm;d)取得的车辆行驶里程信息;误差范围为±5 m;e)取得的车辆方向信息;误差范围为±1.5°;f)计时时间;误差范围为±0.5 s..4.5.4 考试评判4.5.4.1 路考系统应采用计算机辅助评判和人工评判相结合的方式对路考过程进行评判..4.5.4.2 在未完成所有考试项目或考试里程未达到要求时;路考系统应不能判定考试合格..4.5.4.3 路考系统应具备的计算机辅助评判考试项目见附录A中A.1..GA 1026中科目三评判项目未列入附录A表1的;宜采用自动评判..4.5.4.4 计算机辅助评判时;评判响应延时应小于0.5 s..4.5.4.5 路考系统应具备人工评判功能;在考试过程中;路考系统的人机信息交互设备应能显示考试项目对应的评判扣分项;并能够将评判结果录入路考系统..4.5.4.6 路考系统用于小型汽车、小型自动挡汽车、低速载货汽车、残疾人专用小型自动挡载客汽车考试车型的模拟夜间灯光使用考试时;评判扣分项应不少于附录A表A.1中模拟夜间灯光使用考试项目中的5项;项目应随机产生;顺序应不固定..4.5.5 考试指令下达和结果告知4.5.5.1 路考系统应能通过语音或屏幕方式下达考试指令;告知考试结果..指令内容不得对考生的考试操作产生帮助作用..4.5.5.2 路考系统宜采用人工触发和系统预设相结合的指令发布模式..4.5.5.3 通过人行横道线、学校区域、公共汽车站项目不应发布语音考试指令..直线行驶、变更车道、靠边停车、会车、超车项目宜采用人工触发方式发布考试指令..4.5.5.4 路考系统的人机信息交互设备应能根据考试车辆的实时位置;推荐适合人工触发的考试项目..4.5.5.5 路考系统应支持考试车辆在考试区域内随机选择考试路线;并适时向考生发布相应行驶方向指令..4.5.5.6 考试车辆内语音播报的声压级应不小于60 dBA..4.5.6 人机交互4.5.6.1 路考系统应提供人机交互设备;并能实时查看考试过程信息、操作发布考试指令、录入人工评判项目评判结果..4.5.6.2 车载人机交互设备的操作界面应采用触摸显示屏或手持终端..采用触摸显示器的;显示屏亮度应大于300 cd/m2;对角线长度不小于17.78 cm;触摸输入响应延时不大于0.3 s..4.5.6.3 车载人机交互设备应方便观看、操作;不干扰考生正常驾驶..4.5.7 考试过程管理和监控4.5.7.1 路考系统应能实时显示当前的考试状况;包括考试车辆序号、考生姓名、已考考生列表、未考考生列表等;并提供远程用户实时监控接口..4.5.7.2 控制中心应能选取任意考试车辆实时监视其音视频信息、考试过程信息;并可以直接监督和干预其考试过程..4.5.7.3 控制中心应能选取任意考试车辆实时监视其运行位置、当前考生的已考试里程、已扣分项目、目前分数等..4.5.7.4 控制中心应能通过电子地图实时监控所有考试车辆位置;电子地图内显示的车辆位置应与车辆在道路上的实际位置一致..4.5.7.5 控制中心应能与考试车辆进行实时双向通话..4.5.7.6 控制中心应能实时显示考试车辆的监控系统异常报警信息..4.5.7.7 考生第一次考试不合格;路考系统可自动安排在当天进行补考;补考仍不合格的;本次考试终止..对申请大型客车、牵引车、城市公交车、中型客车、大型货车准驾车型考试的;夜间考试不合格当场补考时;白天考试成绩保留..4.5.8 音视频监控4.5.8.1 驾驶室监控驾驶室监控应符合以下要求:a)控制中心的监控设备能实时监视和保存考试车辆驾驶室音视频;b)视频清晰反映驾驶区域考生考试时操作情况和副驾驶区域随车人员情况;分辨率不小于320×240像素点;拍摄角度和清晰度能分辨考生脸部特征;c)音频监控拾音范围覆盖考试车辆驾驶室;d)能在每个考试项目中随机抓拍1张考生图片;图片上叠加拍摄时间信息;精确到秒;图片分辨率不小于320×240像素点;反映考生脸部特征的图片信息不小于50×50像素点;图片文件不超过300kB;e)出现视频信号缺失、摄像头被遮挡等异常情况时能在控制中心监控设备上自动报警..4.5.8.2 考试车辆运行前方监控考试车辆运行前方监控应符合以下要求:a)控制中心的监控设备能实时监视和保存考试车辆运行前方视频;b)视频清晰反映车辆正前方半径50 m、角度45°扇形区域交通情况;分辨率不小于320×240像素点;清晰度能分辨道路交通状况;c)当出现视频信号缺失等异常情况时能在控制中心监控设备上自动报警..4.5.8.3 监控记录考试过程音视频监控记录应符合以下要求:a)能按考生姓名、身份证明号码、考试时间、考试车辆等关键字段进行查询回放;b)查询回放时能同步播放驾驶室音视频、考试车辆运行前方视频及考试过程信息;c)驾驶室音视频和考试车辆运行前方视频从考生考试开始到结束连续播放;d)考试过程信息包括考试车辆编号、考生信息、当前时间、当前项目、实时扣分等;e)格式播放;f)能在线查询回放3年内的考试音视频;并支持远程查询和访问..4.5.9 时间同步路考系统应能在每次开机时自动将路考系统时间、音视频监控时间与考试监管系统时间同步..4.5.10 行驶轨迹记录考试项目采用卫星定位方式进行评判的;路考系统应能按考生信息保存考试过程的考试车辆轨迹数据..考试车辆模型参见GA/T 1028.3-XXXX附录A;考试车辆轨迹信息参见GA/T 1028.3-XXXX附录C..4.5.11 考试信息传输4.5.11.1 路考系统应支持使用无线通信方式和移动存储介质方式;进行车载端与控制中心之间的信息交换..4.5.11.2 车载端与控制中心之间的考试过程信息应实时传输;其他信息可以暂存在车载端用移动介质传输..4.5.11.3 无线网络传输带宽容量应满足全部考试车辆考试过程信息和音视频信息同时传输的要求;信息传输应可靠..4.5.11.4 路考系统应支持从考试监管系统下载考试备案、考试安排信息;数据接口应符合GA 1027的要求..4.5.11.5 路考系统应支持通过网络将考生签到信息实时自动上传至考试监管系统;并从考试监管系统下载考生分配信息..4.5.11.6 路考系统应支持实时通过网络将考试过程信息自动上传至考试监管系统;数据接口应符合GA 1027的要求..4.5.12 数据安全管理4.5.12.1 数据安全管理的基本要求应满足GA/T 1028.1的要求..4.5.12.2 操作用户应只能在限定网络地址IP地址的设备访问路考系统软件..4.5.12.3 路考系统将考试过程中的关键信息;如考生信息、考试时间、考试次数、扣分信息、考试成绩等;存入本地数据库表时应进行加密处理;保存时间应不少于3年..4.5.12.4 路考系统软件应禁止提供屏蔽考试扣分项、修改考试成绩、修改考试参数设置等功能.. 4.5.12.5 路考系统软件应禁止提供通过修改考试预约信息让不合格考生多次补考的功能..4.5.12.6 音视频监控记录应不能修改和部分段删除;保存时间应不少于3年..4.5.13 成绩单打印输出路考系统应具备成绩单自动和手动打印输出功能;成绩单上应随机打印3张考试图片..4.5.14 查询、统计4.5.14.1 考试过程查询路考系统应具备按考生姓名、身份证明号码、考试原因、考试路线编号、考试车辆编号、考试员及驾校等条件;对指定时间段内的考试过程信息进行组合查询;查询结果至少包括:考生姓名、身份证明号码、考试原因、考试车型、考试路线编号、考试车辆编号、驾校、考试开始信息、项目开始信息、考试扣分信息、考试过程图片信息、项目结束信息、考试科目结束信息、考试成绩信息、行驶轨迹等..4.5.14.2 考试结果统计路考系统应具备按考试原因、考试车型、考试车辆编号、考试路线编号、考试员及驾校等条件;对指定时间段内的考试结果信息进行统计;考试结果信息至少包括:考试人次、考试人数、合格人数、合格率、各考试项目中单项评判的不合格/扣分次数等;并能对统计台帐进行打印、拷贝..4.5.14.3 误判统计路考系统应具备按考试路线编号、考试车型、考试车辆编号、考试项目、考试员及驾校等条件;对指定时间段内的误判信息进行统计;并能对统计台账进行打印、拷贝..4.6 电气安全性能4.6.1 电源适应性在表1规定的电源波动范围内;路考系统应能正常工作..表1 电气性能参数4.6.2 绝缘性能绝缘性能应符合GA/T 1028.3-XXXX中4.7.2的规定..4.6.3 耐压性能耐压性能应符合GA/T 1028.3-XXXX中4.7.3的规定..4.7 电磁兼容性4.7.1 考试车辆加装设备的无线电骚扰特性应符合GB/T 18655-2010中第5章、第6章的要求.. 4.7.2 流动考试监控车内电磁辐射防护应符合GB 8702的要求..4.7.3 电磁抗扰度性能应符合GA/T 1028.3-XXXX中4.8的规定..4.8 环境适应性环境适应性应符合GA/T 1028.3-XXXX中4.9的规定..5 试验方法5.1 试验环境如未标明特殊要求;所有试验均在下述条件下进行:——环境温度:-25 ℃~60 ℃;——环境相对湿度:≤ 95%;——能见度:≥ 100 m;——风力:≤ 6级;——控制中心设备和场地设备供电电源:AC 220V;50Hz或AC 380V;50Hz..5.2 一般要求5.2.1 目测并模拟考试过程;检查路考系统的考试内容和评判情况..5.2.2 利用计算机检查路考系统的操作系统和数据库软件..5.2.3 使用长度测量工具对考试车辆的外廓尺寸等进行测量;对照GB 1589检查改装后的考试车辆是否影响外廓尺寸要求;对照GB 7258检查考试车辆的改装部分是否有破坏原车转向系、制动系及原车电气系统的情况;加装设备是否有可能使人致伤的尖锐凸出物..5.2.4 目测必要时采用相关仪器设备检查电源、考试车辆的加装设备及布线等情况..5.3 组成、外观目测检查路考系统的组成及各设备、部件的外观..5.4 电气部件目测必要时采用相关仪器设备检查电源、电气保护装置、接地端子、导线等..5.5 功能5.5.1 系统自检5.5.2 开启路考系统;目测检查系统自检功能及自检结果显示情况..5.5.3 人为修改或更换考试评判软件后开启路考系统;检查路考系统是否对考试评判软件进行安全确认..5.5.4 人为修改或更换考试车辆模型数据、考试路段模型数据后开启路考系统;检查考试评判软件是否对考试车辆模型数据、考试路段模型数据的合规性进行校验..5.5.5 身份认证模拟运行路考系统;检查系统是否正确进行身份认证、是否达到相应的技术要求..5.5.6 信息采集模拟运行路考系统;检查采集到的信息是否与实际情况一致;与实际考试一致..5.5.7 考试评判模拟运行路考系统;按附录A的要求对计算机辅助评判项目逐项进行验证;检查是否达到相应的技术要求;对于非计算机辅助评判的项目;检查人工评判项目的评判结果是否正确录入..检查模拟夜间灯光使用考试时;考试项目是否随机产生及项目顺序是否不固定..5.5.8 考试指令下达和结果告知5.5.8.1 模拟运行路考系统;检查是否采用人工触发和系统预设相结合的模式发布考试指令;是否能对实时扣分信息、考试结果等进行告知;各考试项目的指令发布是否符合要求..5.5.8.2 检查人工触发指令发布模式是否能结合项目设置情况;根据考试车辆的实时位置;推荐适合人工触发的考试项目..5.5.8.3 检查考试车辆在考试区域内是否能随机选择考试路线;并适时向考生发布相应行驶方向指令..5.5.8.4 用声级计测量考试车辆内语音播报的声压级..5.5.9 人机交互模拟运行路考系统;检查车载设备是否能够正确显示考生已经考试的考试项目、实时扣分信息;能否通过人机交互设备发布考试指令、录入人工评判结果..5.5.10 考试过程管理和监控模拟运行路考系统;在控制中心软件界面上选择任意一辆考试车辆;检查当前考试状况显示功能;检查音视频监视信息、考试过程信息、考试车辆运行轨迹等;测试车载端与控制中心之间的双向通话功能..模拟考生第一次考试不合格;验证补考设置情况..5.5.11 音视频监控5.5.11.1 模拟运行路考系统;检查考试车辆驾驶室音视频监控、考试车辆运行前方视频监控的覆盖范围、清晰度等情况..5.5.11.2 运行路考系统软件;检查考生图片抓拍情况..5.5.11.3 通过计算机和相关播放软件检查视频、图片分辨率..5.5.11.4 通过遮挡视频或切断视频信号传输通道等方式检查视频异常情况自动报警功能..5.5.11.5 通过计算机和相关播放软件检查音视频监控记录的查询回放和多画面同步播放功能..5.5.12 时间同步打开路考系统软件、考试监管系统软件和音视频监控系统;检查时间是否同步..5.5.13 行驶轨迹记录运行路考系统软件、数据库软件;检查考试车辆轨迹数据的保存及数据格式..5.5.14 考试信息传输模拟运行路考系统;检查车载端与控制中心之间能否使用无线通信方式和移动存储介质方式正确实现数据传输;无线通信方式需计算数据的误传率;检查路考系统与考试监管系统之间能否正确实现数据传输..5.5.15 数据安全管理使用不同权限的用户登录车载端软件和控制中心软件;检查不同用户所能操作的功能..模拟运行路考系统;检查路考系统日志文件的完整性..模拟运行路考系统;检查是否达到对应的技术要求..5.5.16 成绩单打印输出通过打印机打印输出成绩单的方式进行检查..5.5.17 查询、统计输入考试时间、考生姓名、身份证明号码、考试原因、考试路线编号、考试车辆编号、考试员及驾校等条件;对考生的考试过程信息进行查询;检查考试过程信息是否完整..分别按考试原因、考试车型、考试车辆编号、考试路线编号、考试员及驾校等条件;对指定时间段内的考试结果信息进行统计;检查统计功能是否完整;并检查统计台帐能否进行打印、拷贝等输出..5.6 电气安全性能5.6.1 电源适应性按GA/T 1028.3-XXXX中5.6.1方法测试;检查主要设备的电源适应性..5.6.2 绝缘性能按GA/T 1028.3-XXXX中5.6.2方法测试..车载设备电源负极和车体或与车体相连的部件之间不进行绝缘电阻测量..5.6.3 耐压性能按GA/T 1028.3-XXXX中5.6.3方法测试..车载设备电源负极和车体或与车体相连的部件之间不进行耐压性能检查..5.7 电磁兼容性5.7.1 考试车辆加装设备的无线电骚扰特性按GB/T 18655-2010中5.2、6.2、6.3、6.4、6.5、6.6所述方法测试..5.7.2 流动考试监控车内电磁辐射监测按GB 8702的方法进行..5.7.3 电磁抗扰度性能按GA/T 1028.3-XXXX中5.7方法测试..5.8 环境适应性按GA/T 1028.3-XXXX中5.8方法测试..。
基于RTK的机动车驾驶人考试系统通信协议标准化研究
基于RTK的机动车驾驶人考试系统通信协议标准化研究■ 耿 威 胡新维 孙 巍 张 捷 秦东炜 陈益博(公安部交通管理科学研究所)摘 要:缺乏通信协议标准是制约我国机动车驾驶人考试系统发展、考试监督管理的关键因素,本文从我国机动车驾驶人考试系统应用实际情况出发,充分分析不同企业间基于RTK的机动车驾驶人考试系统间通信数据格式,提出考试系统通信标准协议,有效提高产品通用化、系列化、模块化的水平,加强考试科技化监督管理,规范机动车驾驶人考试工作,为机动车驾驶人考试统一评判和智能监管奠定了基础。
关键词:通信协议,数据格式,标准化,驾驶人考试系统,监督管理DOI编码:10.3969/j.issn.1002-5944.2020.09.014Research on the Standardization of Communication Protocolfor Driving Test SystemsGENG Wei HU Xin-wei SUN Wei ZHANG Jie QIN Dong-wei CHEN Yi-bo (Traffic Management Research Institute of the Ministry of Public Security)Abstract: The supervision of the driving test is lack of communication protocol standard. It is also restricting the development of the driving test system. By analyzing the communication data format of the driving test system which based on RTK, this paper puts forward the standardization of communication protocol to solve the practical problems, which can effectively improve the level of product generalization, serialization and modularization. It can also provide theoretical basis and technical support for the driving test’s evaluation and supervision.Keywords: communication protocol, data format, standardization, driving test system, supervision学术研讨1 引 言随着技术的进步,机动车驾驶人考试评判方式由传统的人工或者利用在考试场地上内设置的红外设备、压力传感器等辅助设施进行评判的方式逐步向“降低场地辅助设备设施要求、减少人工评判参与、更加便于考试组织实施”的卫星定位方式转换。
K528定位定向板卡

K528双天线定位定向GNSJ主板产品说明K528定位定向GNSSfc板是上海司南卫星导航技术有限公司完全自主研发的全球首款BDS B1/B2+GPS L1/L2双系统双天线定位定向OEM板卡。
K528的面世填补了国内外北斗双频加GPS双频咼精度咼动态定位定向板卡的市场空白。
K528可广泛应用于高精度姿态定位定向测量、驾考驾培、航空航天、机械控制、系统集成、各种测姿、平台、勘探、精准农业、交通、海洋、港口、气象、科研院所、大专院校等行业的高精度差分定位、定向、授时等方面。
先进特性采用BDS B1/B2 GPS L1/L2双系统进行联合定位定向,也可以单系统定位定向支持短、中、长基线,RTK作业距离最长可达50km支持动态基站,可以用于二位定向、三维测姿可直接输出PJK平面坐标,易于各种系统集成及机械控制等支持定制化服务,可以满足不同行业应用的特殊需求100 M内存数据存储,可自动记录原始数据高可靠的载波跟踪技术,大大提高了载波精度,为用户提供高质量的原始观测数据智能动态灵敏度定位技术,适应各种环境的变换,适应更加恶劣、更远距离的定位环境全面的兼容的高精简报文,易于数据传输及配套软件的应用开发姿态定向不限制基线长度,可用于各种姿态测量系统姿态测量精度优越,能提高静态或动态平台精确的实时航向、俯仰(或横滚)姿态角体积小、重量轻、功耗低独一无二的性价比三、技术参数信号跟踪198通道BDS B1/B2 I 支路C码GPS L1 C/A 码、L1/L2P定位精度定向精度:方位角精度(0.2/R)°,R为基线距离,单位为米横滚或俯仰角(0.4/R)°,R为基线距离,单位为米伪距精度:GPS: L1=10cm/ L2=10cmBDS B1=10cm/B2=10cm载波精度:GPS: L1=0.5mm/L2=1mmBDS: B1=0.5mm/B2=0.5mm单点定位精度:1.5m(RMS静态精度:水平:土(2.5 +1 X 10-6x D)mm 垂直:土(5 + 1 X 10-6xD)mm 动态差分精度:水平:土(10+0.5 X 10-6x D)mm 垂直:土(20+0.5 X 10-6 x D)mm 授时精度:GPS 20nsBDS 30 ns联合20 ns测速精度:0.03m/s加速度:4g过载:15gRTK初始化(基线长<20km内)RTK初始化时间:<10s初始化可靠性:> 99.9%信号跟踪冷启动:<50s温启动:<30s热启动:<15s信号重捕获:<2s通讯接口3 个LV-TTL RS232 (最大912,600 bps )环境参数工作温度:-40 C—+85 C存储温度:-55 C—+95 C湿度:95%6冷凝数据格式标准NMEA-0183支持GPGGA GPALL GPGS、GPGS、GPGS、GPHDT GPRMCGPVTG GPZDA GPGGARTK扩展NMEA-0183支持BDGGA GPNT R GPCD T GPHPRCompass二进希9 自定义CMR/CMR■支持RTCM2.3 支持RTCM3.0 支持PTNL, PJK 支持物理特性尺寸:60mnr K 100m M 11.6mmI/O 接口:24-pin双排公头外部频标输入接口:MMC X10MHZ重量:40g射频接口天线接口:MMCX输出电源:+3.3V DC输出电流:<100mA电气参数存储空间:100MB输入电压:+3.3 V〜+6V DC功耗:1.9W(双系统)数据更新率定位及定向数据数据更新率:1Hz、5Hz、10Hz (可选)原始数据更新率:1Hz、5Hz、10Hz、20Hz (可选)高度:无限制速度:无限制配套软件司南导航板卡控制软件(CRU司南导航GNSS^据处理软件(Compass Solution )。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2016年2月8日;录用日期:2016年2月26日;发布日期:2016年3月1日
文章引用: 谢月红, 姚定江. 基于高精度 GPS 定位技术的驾考系统[J]. 计算机科学与应用, 2016, 6(3): 103-109. /10.12677/csa.2016.63013
关键词
GPS定位,驾考系统,载波相位差分,车载评判系统,HZ9050-GPS
1. 引言
机动车驾驶人培训和考试系统(即“驾考系统”) [1],是以驾考软件为核心的数据收发处理平台,以 各应用模块作为信息采集终端和传输中介,全面衡量驾驶人驾驶操纵能力的软硬件综合性系统。驾考系 统应能够根据公安部制定的考试标准,在培训环节进行全程自动监管,在考试环节对考生操作进行自动 评判、考试成绩自动发布等基本功能。
Computer Science and Application 计算机科学与应用, 2016, 6(3), 103-109 Published Online March 2016 in Hans. /journal/csa /10.12677/csa.2016.63013
AbstractΒιβλιοθήκη On the condition of the continuous development of auto industry, the motor vehicle drivers test system with the update of global satellite positioning technology becomes the intelligence computer automatic evaluation from the traditional artificial judgment. For driving test system, high precision of position information is necessary. Based on the application of real time kinematic technology and equipment, Huazhong designs the driving test system that meets the requirement of the intelligent positioning evaluation. This system realizes the automatic monitoring in the whole process of the driving test, reduces the misjudgment rate and embodies the principle of fairness and justice.
Driving Test System Based on Technology of High Precision GPS Positioning
Yuehong Xie, Dingjiang Yao Xi’an Huazhong Electronic Technology Co., Ltd., Xi’an Shaanxi
Keywords
GPS Positioning, Driving Test System, Real Time Kinematic (RTK), Vehicle Judge System, HZ9050-GPS
基于高精度GPS定位技术的驾考系统
谢月红,姚定江 西安华众电子科技股份有限公司,陕西 西安
谢月红,姚定江
摘要
在汽车产业不断发展的情况下,机动车驾驶人考试系统随着全球卫星定位技术的更新从传统的人工评判 走向智能化的计算机自动评判。对于驾考系统,高精度的位置定位信息是必要的。基于实时动态差分定 位技术设备的应用,华众设计的驾考系统满足智能化定位评判的要求。系统实现了考试的全程自动监控, 减少了误判率,体现出公平、公正的原则。
我国驾考系统行业的发展与汽车产业发展、道路交通安全管理工作发展密切相关。随着近年来汽车 保有量的提高和社会对道路安全重视程度的提高,驾考系统行业也在快速发展中。但长期以来,按照传 统的驾考布线方式,由于受到的干扰比较多,并且对于场地前期的施工和后期使用的维护工作量较大, 在驾考评判中也存在许多不公行为,这就需要更为方便和精确的测定方法改进以上的不足,使得驾考系 统的建设和使用能够更科学便利[2]。
随着科学技术的不断进步,为了消除和杜绝驾考评判中因为人为因素带来的影响,可以利用高精度 GPS (Global Positioning System) [3]差分定位技术设计驾考系统,实现考试过程的自动化,从而减少误判 率,体现公平、公正的原则。因此,西安华众电子科技股份有限公司依据中华人民共和国公安部第 123 号令所规定的要求[4],最新研制的 HZ9050-GPS 联网型机动车驾驶人场地驾驶技能(科目二)考试系统和 HZ9050-KM3 联网型机动车驾驶人实际道路驾驶技能(科目三)考试系统能够科学、规范、有序的自动完成 机动车驾驶员场地和道路考试的全过程。与现有的考场采用红外传感系统和人工评判相比[5],这套系统 采用了先进的高精度 GNSS 卫星定位、电子传感、无线传输、数据处理、视频监控和指纹识别等技术, 能够达到精确记录和判断驾驶人操作机动车的真实能力,和在各类道路与复杂的障碍路上观察、判断、 预防及应变的能力,以及考察对交通法令、法规的熟悉和理解程度。高精度 GPS 定位技术的应用,使得 该系统完全可以替代机动车驾驶员人工考核的方法,达到驾考过程的智能化。