Fx-4850P计算程序
4850全线连线计算程序
CASIO4850全线坐标正反算程序主程序:ZHANG LIANGLbI Ø :Deg:T"WJM":C=2Ø+4Ø(T-1):T=Ø:N"1.SR,2.JS":N=2=> Goto A⊿M"JZ-XX":O"QD-ZH":U"X-Ø ":V"Y-Ø ":G"FWJ ":Lbl B:{HRQP}: P"QD-R":H"XX-CD":R"ZD-R":Q").-1,(.+1,--.Ø":W=H:Z =Ø:Prog"S1":Prog"S4":U=X:V=Y:O=O+H:G=F-9Ø:P=R:"…SR…NEXT…!”:Isz T: Dsz M:Goto B⊿Lbl A:Fixm:{XYSZN}:T=Ø:N"1.JS-XY,2.XY-FS": N=2=>Goto 2⊿S"JS-ZH=":Z"D=":Lbl 1:S>Z[8T+1+C]=>Isz T:Goto 1⊿Prog "S3":W=S-O: Prog "S1": "JS-X=":X:Pause Ø:"JS-Y=":Y◢Goto AΔLbl 2: X"X…":Y"Y…":I=X:J=Y:Lbl 3: Prog "S3":W=Abs((Y-V)cos(G-9Ø)-(X-U)sin(G-9Ø:W>H=> Isz T:Goto 3⊿Prog "S2":"FS-ZH…":S=O+W:Pause Ø:"D…":Z ◢Goto A⊿子程序S1A=.1184634425:B=.2393143352:N=.2844444444:K=. Ø4691ØØ77:L=.23Ø7653449:D=Q r W2(P-R)÷2HPR:E=Q r WP-1:Z[1]=G+KE+K2D:Z[2]=G+LE+L2D:Z[3]=G+.5E+.25D:Z[4]=G +(1-L)2D+E(1-L:Z[5]=G +(1-K)2D+E(1-K:F=G+E+D+9Ø:X=U+ZcosF+W(AcosZ[1]+BcosZ[2]+NcosZ[3]+BcosZ[4]+AcosZ[5:Y=V+ZsinF+W(AsinZ[1]+BsinZ[2]+NsinZ[3]+Bsin Z[4]+Asin Z[5:子程序S2W=Abs((Y-V)cos(G-9Ø)-(X-U)sin(G-9Ø:Z=Ø:Lbl 4:Prog "S1":L=G-9Ø+E+D:Z=(J-Y)cosL-(I-X)sinL:AbsZ<.ØØ1=>Goto 5:≠>W=W+Z:Goto 4⊿Lbl 5:Z=Ø:Prog "S1":Z=(J-Y)÷sinF:子程序S3H=Z[8T+C+6:O=Z[8T+C+1]-H:U=Z[8T+C+2:V=Z[8T+C+3:G=Z[8T+C+4:P=Z[8T+C+5:R=Z[8T+C+7: Q=Z[8T+C+8:子程序S4Z[8T+C+1]=O+H: Z[8T+C+2]=U: Z[8T+C+3]=V:Z[8T+C+4]=G:Z[8T+C+5]=P:Z[8T+C+6]=H:Z[8T+C+7]=R: Z[8T+C+8]=Q: 结束程序编制说明:1.本程序是为CASIO-fx4850p编制的。
fx-4850P_测角后方交会坐标计算程序PM3-4

fx-4850P 程序测角后方交会坐标计算程序PM3-4 "ANGLE RESECTION PM3-4" 显示程序标题 Fix 3:Deg:Defm 14 基本设置 A"XA(m)=":Z[1]=A 输入已知点A 的X 坐标 B"YA(m)=":Z[2]=B 输入已知点A 的Y 坐标 C"XB(m)=":Z[3]=C 输入已知点B 的X 坐标 D"YB(m)=":Z[4]=D 输入已知点B 的Y 坐标 E"XC(m)=":Z[5]=E 输入已知点C 的X 坐标 F"YC(m)=":Z[6]=F 输入已知点C 的Y 坐标 Norm:Z"D POINT YES(1) OR NO(ELSE)=" 是否有检查点 Fix 3Z=1G"XD(m)=":Z[7]=G:输入已知点D 的X 坐标 H"YD(m)=":Z[8]=H输入已知点D 的Y 坐标K"ANGLE A(Deg)=" 输入角α L"ANGLE B(Deg)=":M=360-K-L输入角β,自动反算角γZ=1T"CHECK ANGLE D(Deg)=" 有D 点坐标输入θ角I=0:J=0 避免执行Pol 函数时提示输入I,J 变量 O=1:P=2:Q=3:Prog "ANGLE" 调子程序计算∠A"ANGLE A(DMS)=":V显示∠AZ[11]=1÷((tan V) -1-(tan K)-1) 计算A PO=2:P=3:Q=1:Prog "ANGLE" 调子程序计算∠B"ANGLE B(DMS)=":V 显示∠BZ[12]=1÷((tan V)-1-(tan L)-1)计算B P O=3:P=1:Q=2:Prog "ANGLE" 调子程序计算∠C"ANGLE C(DMS)=":V 显示∠CZ[13]=1÷((tan V)-1-(tan M)-1) 计算CPX=(Z[11]Z[1]+Z[12]Z[3]+Z[13]Z[5])÷(Z[11]+Z[12]+Z[13]) 计算交会点坐标 Y=(Z[11]Z[2]+Z[12]Z[4]+Z[13]Z[6])÷(Z[11]+Z[12]+Z[13])"Xp(m)=":X 显示交会点坐标"Yp(m)=":YZ=1Z[9]=X:Z[10]=Y: 如果观测了检查角O=5:P=3:Q=4:Prog "ANGLE": 调子程序计算检查角"ANGLE CHECK(DMS)=":V 显示计算的检查角W=T-V:计算检查角观测值与计算值之差 "CHECK ANGLE ERROR(DMS)=":W 显示检查角差"NO CHECK ANGLE!" 显示没有观测检查角"PM3-4END"子程序——ANGLEPol(Z[2P-1]-Z[2O-1],Z[2P]-Z[2O]):ClsJ<0J=J+360R=J计算O →P 方向的方位角 Pol(Z[2Q-1]-Z[2O-1],Z[2Q]-Z[2O]):ClsJ<0J=J+360S=J计算O →Q 方向的方位角 V=R-S 计算方位角差V<0V=V+360。
CASIO fx—4850P计算器高程控制网按间接平差计算程序

则 法 方 程 式为 CX +L =0 L
解 上 式 得 x= 一 c L L () 3
Me : e : N : i : =T +N: =0 5 N +1) l D g T M Fx A m W . N( :
式 中 : ~ 观 测 值 改 正 数 向 量 ,A 一 误 差 方 程
=
单位 权 中误 差 : =  ̄( P V U / [ V ]÷(n—n )待 r )
L l : [ M + ]= =z I =z P 一 [ + M + b F z A+ J P [] [ ] z A 2
Jl L l G: ≠Mj G t J=0 I b J ooD : ≠Aj G t C oo
将程 序 中划 线部 分 内容删 除 , 节 省 程序 容 量 2 5字 可 3
其 法方 程 式 为 :
A P X +A P A L=0 () 2
令
C= A P A, L L=A P L
节, 中问结果在计算结束后从 内存 中提出查看 。 3 1 主 程序 .
GCW JPC J
Z[ + M +I I A 6 ] ≠M: ooQ I : t =0/  ̄G
L l IzI “ L N)=” Z『 +N+8 +I I b s : L ( X: A M ] ≠N
j Go I tX o =0: b IzI “ W )=” ZI + L lY:s : C( A
求点高程中误差 Mui ()=±U ̄c /
2 程序 功 能 . 程序可进行高程控制 网按间接平 差计算 , 计算数
据在扩大储存 变量 zE]中按 一维存 放 , 了节省 内 j 为 存单元 , 解算 中采用 了内存单元叠加 的办法 , 即由误
广州卡西欧技术 FX-4850P 测试计算器说明书
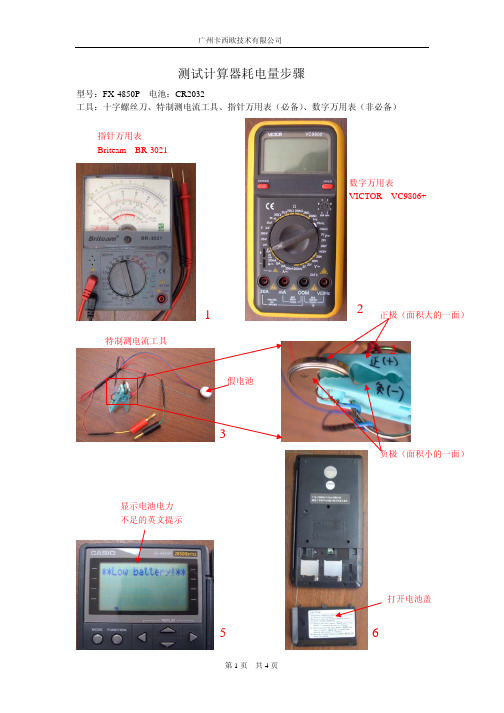
测试计算器耗电量步骤型号:FX-4850P 电池:CR2032工具:十字螺丝刀、特制测电流工具、指针万用表(必备)、数字万用表(非必备)指针万用表Briteam BR-3021数字万用表VICTOR VC9806+正极(面积大的一面)负极(面积小的一面)显示电池电力不足的英文提示打开电池盖1 2652松开螺丝取出电池压片7 8从电池边缺口处撬起旧电池8测量电池电量红接正黑接负红接+A V黑接COM指针移动幅度很小说明旧电池没电9-2旧电池指针移动幅度大(3V)说明新电池电力充足测量新电池电量101211将特制测电流工具的假电池装入计算器电池仓将电池盖滑动开关向上推13-1滑动开关处于此位置表示电池盖已经盖上 此时计算器才能正常工作14-214-1选择2mA 的电流档红接mA 黑接COM1615 测量待机电流,图示值为0.2157mA 等于216uA ,属正常范围测量按键电流,图示值为0.6805mA 等于681uA ,属正常范围键被按住时 本例使用数字万用表测以上为测量计算器耗电量的步骤(完毕)测量关机电流,图示值为0.0065mA 等于6.5uA , 属正常范围已经关机1718-1注意如果更换电池后计算器不能开机,请尝试按此后壳上的复位键,但此操作可能导致内存中的数据丢失装回电池压片并且旋紧螺丝旧电池装回电池盖旧电池21 22 更换电池完毕并且功能正常取出旧电池装入新电池1920。
CASIO4850全线坐标正反算程序
CASIO4850全线坐标正反算程序主程序:ZHANG LINGLbI 0:Deg:T“WJM”:C=20+40(T-1):T=0:N“1.SR,2.JS”:N=2=>Goto A△M“JZ-XX”:O“QD-ZH”:U“X0”:V“Y0”:G“FWJ”:LbI B:{HRQP}:P“QD-R”:H“XX-CD”:R“ZD-R”:Q“)-1,——0,(+1”:W=H:Z=0:Prog“S1”:Prog“S4”:U=X:V=Y:O=O+H:G=F-90:P=R:“…SR…NEXT…”:Isz T:Dsz M:Goto B△LbI A:Fixm:{XYSZN}:T=0:N“1.JS-XY,2.XY-FS”:N=2=>Goto 2△S“JS-ZH=”:Z“D=”:LbI 1:S>Z[8T+C+1]= >Isz T:Goto 1△Prog“S3”:W=S-O:Prog“S1”:“JS-X=”:X:Pause 0:“JS-Y=”:Y▲Goto A:LbI 2:X“X…”:Y“Y…”:I=X:J=Y:LbI 3:Prog“S3”:W=Abs((Y-V)Cos(G-90)-(X-U)Sin(G-90:W>H=>Isz T:Goto 3△Prog“S2”:“FS-ZH…”:S=O+W:Pause 0:“D…”:Z▲Goto A子程序S1A=0.1184634425:B=0.2393143352:Z[6]=0.2844444444:K=0.046910077:L=0.2307653449:D=Q r W2(P-R)÷2HPR:E=Q r WP-1:Z[1]=G+KE+K2D:Z[2]=G+LE+L2D:Z[3]=G+0.5E+0.25D:Z[4]=G+(1-L)2D+E(1-L:Z[5]=G+(1-K)2D+E(1-K:F=G+E+D+90:X=U+ZCosF+W(ACosZ[1]+BCosZ[2]+Z[6]CosZ[3]+BCosZ[4]+ACosZ[5]:Y=V+ZSinF+W(ASinZ[1]+BSinZ[2]+Z[6]SinZ[3]+BSinZ[4]+ASinZ[5]子程序S2W=Abs((Y-V)Cos(G-90)-(X-U)Sin(G-90:Z=0:LbI 4:Prog“S1”:L=G+E+D-90:Z=(J-Y) CosL-(I-X) SinL:AbsZ<E-6=>Goto 5:≠>W=W+Z:Goto4△LbI 5:Z=0:Prog“S1”:Z=(J-Y)÷SinF子程序S3H=Z[8T+C+6]:O=Z[8T+C+1]-H:U=Z[8T+C+2]:V= Z[8T+C+3]:G=[8T+C+4]:P=Z[8T+C+5]:R=Z[8T+C+7]:Q=Z[8T+C+8]子程序S4Z[8T+C+1]=O+H:Z[8T+C+2]=U:Z[8T+C+3]=V:[8T+C+4]=G:Z[8T+C+5]= P:Z[8T+C+6]=H:Z[8T+C+7]=R:Z[8T+C+8]=Q程序编制说明:1.本程序是为CASIO-fx4850p编制的。
fx-4850P_单一闭附合图根导线近似平差程序

按键
1 4 -1 237 59 30 2507.693 1215.632 2166.741
说明
显示程序标题 输入 0 为闭合导线 输入导线未知点数 输入 A 点的 x 坐标 输入 A 点的 y 坐标 输入 B 点的 x 坐标 输入 B 点的 y 坐标 显示 A→B 边长 显示 A→B 边方位角 显示 B→A 边方位角 提示输入 B 点角度与平距 输入 B 点水平角 输入 B 点的平距 提示输入 1 点角度与平距 输入 1 点水平角 输入 1 点的平距 提示输入 2 点角度与平距 输入 2 点水平角 输入 2 点的平距 提示输入 3 点角度与平距 输入 3 点水平角 输入 3 点的平距 输入最后一个水平角 显示以角度闭合差(秒) 显示分配角度闭合差后的检核结果 显示 x 坐标增量闭合差 显示 y 坐标增量闭合差 显示导线全长相对闭合差分母 显示第 1 点的坐标计算结果 显示第 1 点的 x 坐标 显示第 1 点的 y 坐标 显示第 2 点的坐标计算结果 显示第 2 点的 x 坐标 显示第 2 点的 y 坐标 显示第 3 点的坐标计算结果 显示第 3 点的 x 坐标 显示第 3 点的 y 坐标 显示检核点的坐标计算结果 显示检核点的 x 坐标 显示检核点的 y 坐标 显示检核点的 x 坐标差 显示检核点的 y 坐标差 程序运行结束显示
Deg:Fix 3
设置十进制度为单位
A"XA(m), 0 TO BEAR A B(Deg)="
输入 A 点 x 坐标或输入≤0 的数值
A>0 B"YA(m)=": R"BEAR A B(Deg)=" A>0 时输入 A 点 y 坐标,否则输入 A→B 方位角
C"XB(m)=":D"YB(m)="
fx-4850P_闭附合图根水准路线近似平差计算程序PM3-6
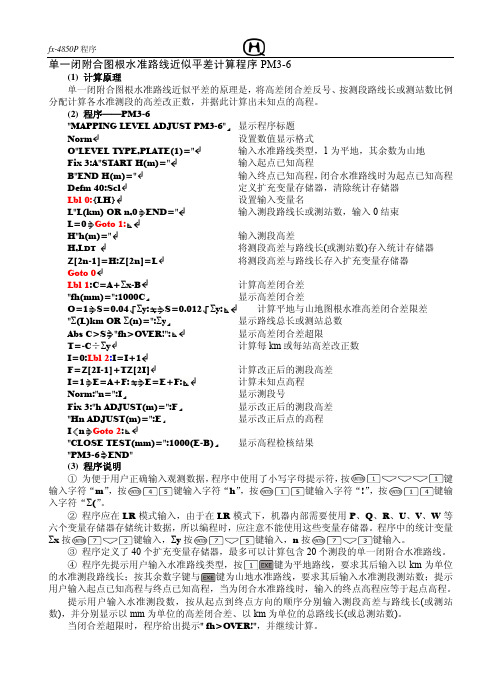
单一闭附合图根水准路线近似平差计算程序PM3-6(1) 计算原理单一闭附合图根水准路线近似平差的原理是,将高差闭合差反号、按测段路线长或测站数比例分配计算各水准测段的高差改正数,并据此计算出未知点的高程。
(2) 程序——PM3-6"MAPPING LEVEL ADJUST PM3-6"显示程序标题Norm设置数值显示格式O"LEVEL TYPE,PLATE(1)="输入水准路线类型,1为平地,其余数为山地Fix 3:A"START H(m)="输入起点已知高程B"END H(m)="输入终点已知高程,闭合水准路线时为起点已知高程Defm 40:Scl定义扩充变量存储器,清除统计存储器Lbl 0:{LH}设置输入变量名L"L(km) OR n,0END="输入测段路线长或测站数,输入0结束L=0Goto 1:H"h(m)="输入测段高差H,LDT 将测段高差与路线长(或测站数)存入统计存储器Z[2n-1]=H:Z[2n]=L将测段高差与路线长存入扩充变量存储器Goto 0Lbl 1:C=A+Σx-B计算高差闭合差"fh(mm)=":1000C显示高差闭合差O=1S=0.04Σy:S=0.012Σy:计算平地与山地图根水准高差闭合差限差"Σ(L)km OR Σ(n)=":Σy显示路线总长或测站总数Abs C>S"fh>OVER!":显示高差闭合差超限T=-C÷Σy计算每km或每站高差改正数I=0:Lbl 2:I=I+1F=Z[2I-1]+TZ[2I]计算改正后的测段高差I=1E=A+F:E=E+F:计算未知点高程Norm:"n=":I显示测段号Fix 3:"h ADJUST(m)=":F显示改正后的测段高差"Hn ADJUST(m)=":E显示改正后点的高程I n Goto 2:"CLOSE TEST(mm)=":1000(E-B)显示高程检核结果"PM3-6END"(3) 程序说明①为便于用户正确输入观测数据,程序中使用了小写字母提示符,按键输入字符“m”,按键输入字符“h”,按键输入字符“!”,按键输入字符“Σ(”。
4850计算器坐标正反计算程序共8页文档
曲线任意里程中边桩坐标正反算(CASIO fx-4850P计算器)程序(修改版)一、程序功能及原理1.功能说明:本程序由一个主程序(XYZ)和两个子程——正算子程序(A)、反算子程序(B)序构成,可以根据曲线段——直线、圆曲线、缓和曲线(完整或非完整型)的线元要素(起点坐标、起点里程、起点切线方位角、线元长度、起点曲率半径、止点曲率半径)及里程边距或坐标,对该曲线段范围内任意里程中边桩坐标进行正反算。
另外也可以将本程序中核心算法部分的两个子程序移植到其它相关的程序中,用于对曲线任意里程中边桩坐标进行正反算。
本程序也可以在CASIO fx-4500P计算器及 CASIO fx-4850P计算器上运行。
2.计算原理:利用Gauss-Legendre 5点通用公式计算线路中边桩坐标并计算放样数据。
二、源程序1、主程序(XY-ZD)Defm 2:F=1:(F=1正算,F=2反算)Z[1]=90(右边线与路中线右夹角)Prog”THB”:Fix 3:”X=”:X▲”Y=”:Y▲(F=2时,为“KM=“:Z▲”D=“:D ▲)2次程序:THBZ“KM“:A=第一段线终点桩号:B=第二段线终点桩号:C=第三段线终点桩号:E=第四段线终点桩号:F=第五段线终点桩号:……(有多少段就加多少段;超过十五段,要另加子程序转过来)Z<A=>Prog”C1”:≠>Z<B=>Prog”C2”: ≠>Z<C=>Prog”C3”: ≠> Z<E=>Prog”C4”: ≠>Z<F=>Prog”C5”ΔΔΔΔΔ……(有几段线,则打几个三角)C=1÷P:S=(P-R)÷(2HPR):E=180÷π:F=1=>Goto 1:≠>Goto 2Δ←Lbl 1:D:W=Z-O:Prog "A":Goto 3Lbl 2:{XY}:XY:I=X:J=Y:Prog "B":Z=O+W:D=D:Goto 3Lbl 3:F=1=>X:Y :≠>Z:D:3. 正算子程序(A)A=0.1184634425:B=0.2393143352:N=0.2844444444:K=0.0469100770:L=0.230765 3449:M=0.5:X=U+W(Acos(G+QEKW(C+KWS))+Bcos(G+QELW(C+LWS))+Ncos(G+QEMW(C +MWS))+Bcos(G+QE(1-L)W(C+(1-L)WS))+Acos(G+QE(1-K)W(C+(1-K)WS))): Y=V+W (Asin(G+QEKW(C+KWS))+Bsin(G+QELW(C+LWS))+Nsin(G+QEMW(C+MWS))+Bsin(G+QE (1-L)W(C+(1-L)WS))+Asin(G+QE(1-K)W(C+(1-K)WS))):Z[2]=G+QEW(C+WS)+Z[1]:X=X+Dcos Z[2]:Y=Y+Dsin Z[2]4. 反算子程序(B)T=G-90:W=Abs((Y-V)cosT-(X-U)sinT):D=0:Lbl 0:Prog "A":L=T+QEW(C+WS):Z=(J-Y)cosL-(I-X)sinL:AbsZ<1E-6=>Goto1:≠>W=W+Z:Goto 0Δ←┘Lbl 1:Z=0:Prog "A":Z=(J-Y)÷sinZ[2]5.曲线元要素数据库:C1~C5…….O=xxxx.xxx:U=xxxx.xxx:V=xxxx.xxx:G=xxxx.xxx:H=xxxx.xxx:P=xxxx.xxx:R=xx xx.xxx:Q=x (注:一段线一个子程序,分别提供这几个要素数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
主线高程计算ZXSJGC(设计高程主程序)Fixm : Lbl 1:{EM}:E”ZHUANG HAO ″:M”CENG”:Prog”SY”:E≤A-T→F=D-B (A-E):≠→Prog “GG1”△Prog “GG2”:M=1→F=F:Goto 2△回车M=2→F=F-0.04:Goto 2△回车M=3→F=F-0.1:Goto 2△回车M=4→F=F-0.18:Goto 2△回车M=5→F=F-0.38:Goto 2△回车M≥6→Prog”GSLX”△回车M=7→F=F-0.2△Lbl 2:K ≠0→N”HENG PO ″=100N▲[注:若不显示横坡则把前面的“▲”换为“:”即可]F”GAO CHENG ″▲[注:若不显示高程则把前面的“▲”换为“:”即可] ≠→F”GAO CHENG ″▲[注:若不显示高程则把前面的“▲”换为“:”即可]△Prog “WCJS”: [注:若不须要计算误差则把前面的“Prog “WCJS”:”删除即可]Goto 1ZXSGGC(施工导线高程主程序)Fixm : Lbl 1:{EM}:E”ZHUANG HAO ″:M”CENG”:Prog”SY”:E≤A-T→F=D-B (A-E):≠→Prog “GG1”△Prog “GG2”:M=1→F=F+0.04*0.15[注:0.04为第一层厚度,0.15为第一层松铺系数]:Goto 2△回车M=2→F=F-0.04+0.06*0.15[注:0.06为第二层厚度,0.15为第二层松铺系数]:Goto 2△回车M=3→F=F-0.1+0.08*0.15[注:0.08为第三层厚度,0.15为第三层松铺系数]:Goto 2△回车M=4→F=F-0.18+0.08*0.15[注:0.08为第四层厚度,0.15为第四层松铺系数]:Goto 2△回车M=5→F=F-0.26+0.32*0.25[注:0.32为第五层厚度,0.25为第五层松铺系数]:Goto 2△回车M≥6→Prog”GSLX”:F=F+0.2*0.25[注:0.2为第六层厚度,0.25为第六层松铺系数]△Lbl 2:Prog “WCJS”: [注:若不须要计算误差则把前面的“Prog “WCJS”:”删除即可]Goto 1WCJS (计算实测与设计误差及工程量子程序){X}:X”DU SHU ″:Q”SCGC ″=Y[注:Y值每次开始前或转站时必须存入测站的视线高程]-X/1000[注:读数单位为米时不除1000]▲W”WU CHA ″=Q-F▲[注:以下步骤为现场计算路基低于设计高程15mm 以下部分工程量程序,若不计算可以不加或不显示结果]W ≥-15→Goto 1:≠→AbsK =1→V=(-W+15)*60 [注:此公式为计算距中1米处补偿量]:Goto 5≠→AbsK =13→V=(-W+15)*64[注:此公式为计算距中13米处补偿量]:Goto 5≠→V=(-W+15)*80 [注:此公式为计算距中5、9米处补偿量] △△△Lbl 5: Z=Z+V [注:Z 值每次计算前必须存入“0”,最后提出即可]:Lbl 1 [注:以上程序若不扣除15mm 只须把上述体积计算公式中的“+15”去除即可;若布点位置不同则体积公式要随着改变]GG1(子程序1)G=Abs(A-E):H=(T-G )2÷2÷R :B >C →A ≥E →F=D-GB-H △△B >C →A <E →F=D+GC-H △△B <C →A ≥E →F=D-GB+H △△B <C →A <E →F=D+GC+H △△GG2(子程序2){K }:K ”YC ″:K >0→Prog ”PY2”: ≠→Prog “PY1”△E ≤J-I-2L →N=0.02:F=F-N( AbsK-1):≠→Prog “GG3”△GG3(子程序3)K= AbsK :E ≤J-L-I →N=0.02-(0.04÷L )×(E-J+2L+I ):F=F-N(K-1):Goto 1△回车E ≤J-L →N=-0.02:F=F-(K-1)×0.02: Goto 1△回车E ≤J →N=-0.02+(0.04÷L )×(E-J+L ):F=F-(K-1)N △Lbl 1SY (竖曲线要素)E ≤竖曲线结束点桩号→B=进入坡度:C=出去坡度:T=切线长:R=竖曲线半径:A=顶点桩号:D=顶点高程:Goto 2△回车重复上述步骤至最后一条竖曲线为止△Lbl 2PY1(左幅横坡要素)E ≤左幅变坡点结束点桩号→L=超高变坡段长:I=超高段长:J=左幅变坡点结束点桩号:Goto 1△回车重复上述步骤至最后一段个超高段为止△Lbl 1PY2(右幅横坡要素)E≤右幅变坡点结束点桩号→L=超高变坡段长:I=超高段长:J=右幅变坡点结束点桩号:Goto 1△回车重复上述步骤至最后一段个超高段为止△Lbl 1GSLX(中湿与干燥类型要素)E≤第一段中湿类型结束点桩号→Lbl 2:F=F-0.56:Goto 1△回车E≤第一段干燥类型结束点桩号→Lbl 3:F=F-0.54:Goto 1△回车E≤下一段中湿类型结束点桩号→Goto 2△回车E≤下一段干燥类型结束点桩号→Goto 3△回车重复上述后两步至最后中湿或干燥段为止△Lbl 1匝道高程计算ZA DAO GC(主程序)Fixm : Lbl 1:{E}:E”ZHUANG HAO ″: Prog “MLGC”:F▲Goto 1MLGC(子程序1)Prog “MLZ”:Prog “SQXY”:{K}:K”YC ″:K>0→Prog “MLB2”:≠→Prog “MLB1”△Prog “BZ”SQXY(子程序2)E≤A-T→F=D-B(A-E ):≠→Prog “GG1”△BZ(子程序3)K= AbsK:F=F-(L-(I-L)÷N×(E-J+N))×KMLZ(竖曲线要素)E≤竖曲线结束点桩号→B=进入坡度:C=出去坡度:T=切线长:R=竖曲线半径:A=顶点桩号:D=顶点高程:Goto 1△回车重复上述步骤至最后一条竖曲线为止△Lbl 1MLB1(左幅横坡要素)E≤左幅变坡点结束点桩号→L=起点横坡:I=终点横坡:J=左幅变坡点结束点桩号:N=变坡段长:Goto 1△回车重复上述步骤至最后一段个超高段为止△Lbl 1MLB2(右幅横坡要素)E≤右幅变坡点结束点桩号→L=起点横坡:I=终点横坡:J=右幅变坡点结束点桩号:N=变坡段长:Goto 1△回车重复上述步骤至最后一段个超高段为止△Lbl 1主线坐标计算ZZ(主程序)Fixm : Lbl 1:”ZHUANG HAO ″?L: Prog “YZ”:Prog “ZZ1”:Prog “ZZ2”:”YC ″?Q: if Q>0:thenRec(Q,Z+90):elseRec(-Q,Z-90)ifendX=X+I▲Y=Y+J▲Z→DMS▲Goto 1ZZ1(子程序1)πA AbsW÷180→C:Atan(AbsW÷2)→F:B=0=>0→D:0→E:K-F→R:R+C→T:S→R:U→T: B≠0=>B 2÷24÷A→D:B÷2-B3÷240÷A2→E:Dtan( A bsW÷2)+E+F→F:C+B→C:K-F→R:R+B→S:R+C→U:U-B→T△ZZ2(子程序2)ifL≤R:thenG+ Rec(K-L,V+180)→X:H+J→Y:Z→V: Goto 0elseifL≤S:thenRec(F,V+180):G+I→X:H+J→Y:L-R→C: Prog “ZZ3”:V+90C2÷(πAB) →ZW<0=>0-J→J:V-90C 2÷(πAB) →Z:Prog “ZZ4”:Goto 0elseifL≥U:thenRec(L-U+F,V+W):G+I→X:H+J→Y :V+W→Z:Goto 0 elseifL≥T:thenRec(F,V+W):G+I→X:H+J→Y :U-L→C:Prog “ZZ3”:0-I→I:V+W-90C 2÷(πAB) →Z:W<0=>0-J→J:V+W+90C2÷(πAB) →ZX+ICos(V+W)-JSin(V+W) →X: Y+I Sin(V+W)+J Cos(V+W)→Y:Goto 0G+ Rec(F,V+180)→X:H+J→Y:180(L-R-B÷2) ÷A÷π→C:A SinC+E→I:A(1-CosC)+D→J:V+C→Z: W<0=>O-J→J:V-C→Z:Prog “ZZ4”ifendLbl 0:if z<0:thenz+360→z:elseifz≥360:thenz-360→z:ifend ZZ3(子程序3)C-C 5÷(40 A2B2) →I:C3÷(6AB)- C7÷(336(AB)3)→JZZ4(子程序4)X+ICosV-JSinV→X: Y+I SinV+JCosV→YYZ(平曲线要素)L≤园曲线或缓和曲线终点桩号→G=交点纵坐标X:H=交点横坐标Y:K=交点里程:V=进入方位角:A=半径:W=转角(左转为“-“):B=缓和曲线长度:Goto 2△回车重复上述步骤至最后一条平曲线为止△Lbl 2匝道坐标计算ZD(主程序)Fixm:Lbl 0:{L}:L“ZHUANGHAO”:Prog“QSSJ”:R=0→S=0→Prog“ZX”:Goto 2△△R=S→Prog“RQX”:≠→Prog“LES”△Lbl 2:Z>360→Z=Z-360 △Z<0→Z=Z+360 △X ▲Y ▲Z ▲Lbl 3:{Q}:Q“BL”:Q=0→Goto 0 △D=X-QSinZ:K=Y+QCosZD ▲K ▲Goto 3ZX 子程序<12>I=(L-B:T=F:J=0:Z=T:Prog“XYZS”YQX 子程序<13>V=180(L-B)÷R÷π:Z=F+V:I=RSinV:J=R(1-CosV:T=F:Prog“XYZS”LES 子程序<14>S=0→M=0:C=Abs(R(N-B):T=F:A=(L-B:R>0→Z=90A2÷C÷π+T: ≠→Z=T-90A2÷C÷π△Goto 1 △S ≠0→R ≠0→(Abs s)>(Abs R)→C=Abs((N-B)×SR÷(S-R: M=Abs(C÷S: E=90M2÷C÷π:A=M+(L-B: S>0→T=F-E: Z=T+90A2÷C÷π:≠→T=F+E: Z=T-90A2÷C÷π△ Goto 1 △△△R≠0→S≠0→(Abs R) >(Abs S)→C=Abs((N-B)SR÷(S-R: M=Abs(C÷S: E=90M2÷C÷π:E=-E: A=M-(L-B: R>0→T=F-E: Z=T-90A2÷C÷π: ≠→T=F+E: Z=T+90A2÷C÷π△△Goto 1 △△R=0→C=Abs(S(N-B: M=Abs(C÷S:E=90M2÷C÷π: E=-E: A=M-(L-B:S>0→T=F-E: Z=T-90A2÷C÷π: ≠→T=F+E:Z=T+90A2÷C÷π△Goto 1 △Lbl 1 :Prog “ABV”XYZS 子程序<15>X=G+IcosT-JsinT:Y=H+IsinT+JcosTABV 子程序<16>I=(A-M-(AΛ5-MΛ5)÷40÷C2+(AΛ9-MΛ9)÷3456÷CΛ4-(AΛ13-MΛ13)÷599040÷CΛ6+(AΛ17-MΛ17)÷17547264÷CΛ8:J=(AΛ3-MΛ3)÷6÷C-(AΛ7-MΛ7)÷336÷CΛ3+( AΛ11-MΛ11)÷42240÷CΛ5-( AΛ15-M Λ15)÷9676800÷CΛ7+( AΛ19-MΛ19)÷3530096640÷CΛ9: R=0→S>0→I=-I:≠→I=-I:J=J △△S=0→R>0→I=-I:≠→J=-J:I=-I △△S≠0→(Abs S)>(Abs R)→S<0→J=-J:≠→I=I△△△R≠0→(Abs S)<(Abs R)→S<0→I=-I:J=-J:≠→I=-I:J=J: △△△Prog “XYZS”注:画线部分可不输入[完]附和导线简单平差计算程序同时可以计算附合导线,无定向导线主程序:DXJSQ “TX=F:W”:B:X:Y:F:Q=2→D:E: (注:以上,附和时Q≠2即可)≠→D:E:A △Z=0:V=0:W=0:N=0:Lbl 0:N=N+1 :{S}S“BIAN CHANG”:Z=Z+S:Z[ZN]=S:Prog “FJ”:Z[ZN-1]=F:Prog “D”:N<B→Goto0 △ Q=Z→Prog “X”: ≠→Prog“FJ”:Prog “J”:Prog “P”△1、子程序“FJ”G=180:{L}:L“JIAO DU”:F=F+L:F≤G→F=F+G:≠→F=F-G△F≥2G→F=F-2G2、子程序——DRec(Z[ZN,ON+Z [ZN-1:V=V+I:W=W+J3、子程序——XPol(D-X,E-Y:U=I:O=J:“T=”:T=Z÷Abs(U-Pol(V,W ▲K=U÷I:O=O-J:N=0:Lbl 1:“N=”:N=N+1 ▲“XN=”:X=X+Rec(KZ[ZN],O+Z[ZN-1 ▲“YN=”:Y=Y+J ▲N<B→Goto 1 △“END”4、子程序——JV=0:W=0:“FW=”:F=F-A ▲0=-F÷(B+1:N=0:Lbl 2:N=N+1:Prog “D”:N<B→Goto 25、子程序——P“FX=”:V=V+X-D ▲“FY=”:W=W+Y-E ▲“T=”:T=Z÷√(V2+W2▲ V=-V÷Z:W=-W÷Z:N=0:Lbl 3:“N=”:N=N+1 ▲“XN=”:X=X+Rec(Z[ZN,ON+Z[ZN-1]+VZ[ZN ▲“YN=”:Y=Y+J+WZ[ZN ▲N<B→Goto 3 △“EDN”B——导线边数 S——平距L——水平角 F——起始边的方位角X,Y——起始点坐标 A——终止边方位角Fw——方位角闭合差 D,E——终止点坐标Fx——纵坐标闭合差 XN,YN——为求标点坐标FY——横坐标闭合差T——导线相对闭合差分母值JX——图形信息(附合时=1,无定向时)主线放样主程序ZHU XIAN FYFixm:{MN}:M “X0”:N “Y0”:Lbl 1:{L}:L “ZHUANG HAO”: Prog “YZ”:Prog “ZZ1”:Prog “ZZ2”:{Q}:Q “YC”:Q>0→Rec (Q,Z+90 :≠→Rec(-Q,Z-90 △X=X+I:Y=Y+J:Pol(X-M,Y-N:J<0→J=J+360 △“F=”:J→DMS ▲“L=”:I ▲ Goto 1注:用计算器计算方位角和距离,然后拔角测距放样。