四杆机构习题答案课件
铰链四杆机构pptPPT课件
9/12/2023
7
第7页/共14页
铰链四杆机构类型判定: (1)如果满足杆长和条件
以最短杆作连架杆,为曲柄摇杆机构,最短杆为曲柄; 以最短杆作机架,为双曲柄机构,有两个曲柄; 以最短杆作连杆,为双摇杆机构,没有曲柄 (2)如果不满足杆长和条件,则为双摇杆机构。
9/12/2023
8
第8页/共14页
第14页/共14页
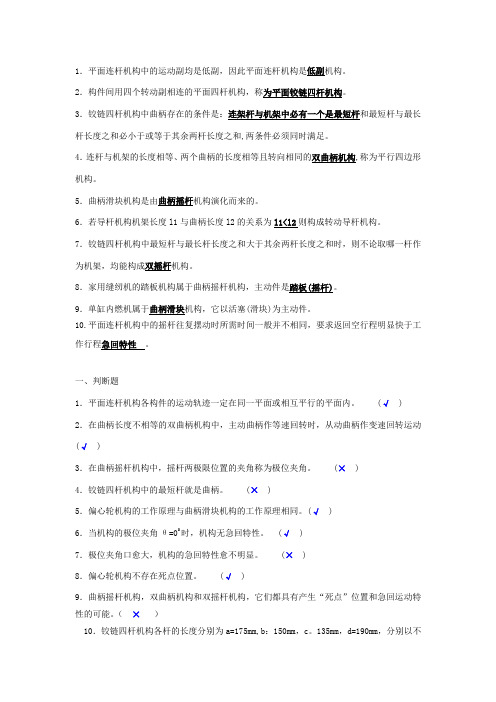
图示四杆机构中,已知各构件长度LAB=55mm, LBC=40mm,
LCD=50mm, LAD=25mm,判断
(1)以AB为机架可以获得( 曲柄摇杆 )机构? D (2)以AD为机架可以获得( 双曲柄 )机构? 25 (3)以BC为机架可以获得( 双摇杆 )机构? A
解:先判断杆长和条件:25+55≤40+50 符合此条件。 根据判定结论得到:
50 55
(1)以AB为机架,最短杆为连架杆, 为曲柄摇杆机构 (2)以AD为机架,最短杆为机架, 为双曲柄机构 (3)以BC为机架,最短杆为连杆, 为双摇杆机构
C 40 B
9/12/2023
6
第6页/共14页
按 下列各 图所注 出的尺 寸,分 析确定 各机构 的名称
双曲柄机构
曲柄摇杆机构 双摇杆机构 双摇杆机构
9/12/2023
10
第10页/共14页
1、搜集生活中的可用零件,做成各种类型的 铰链四杆机构的模型
2、做《习题集》上相关试题加以巩固练习
9/12/2023
11
第11页/共14页
9/12/2023
12
第12页/共14页
9/12/2023
13
第13页/共14页
感谢您的观看!
《平面四杆机构》课件

目 录
• 平面四杆机构简介 • 平面四杆机构的基本形式 • 平面四杆机构的运动特性 • 平面四杆机构的优化设计 • 平面四杆机构的实例分析 • 平面四杆机构的创新与发展
01
平面四杆机构简介
定义与特点
定义
平面四杆机构是指在平面内由四 个刚性构件通过低副(铰链或滑 块)连接而成的相对固定和相对 运动的机构。
总结词
随着科技的不断发展,平面四杆机构的设计 也在不断创新,新型的平面四杆机构在结构 、性能和应用方面都得到了显著提升。
详细描述
新型平面四杆机构采用了先进的材料和设计 理念,使得其具有更高的稳定性和耐用性。 同时,新型平面四杆机构在运动学和动力学 方面也进行了优化,能够实现更加精准和高
效的运动控制。
平面四杆机构的分类
根据连架杆的形状
曲柄摇杆机构、双曲柄机构、双摇杆机构。
根据机架的长度
长机架四杆机构、短机架四杆机构。
02
平面四杆机构的基本形式ຫໍສະໝຸດ 曲柄摇杆机构总结词
曲柄摇杆机构是平面四杆机构中最常 见的形式之一,其中一根杆固定作为 曲柄,另一根杆作为摇杆,通过曲柄 的转动来驱动摇杆的摆动。
详细描述
特点
具有结构简单、工作可靠、传动 效率高、制造容易等优点,因此 在各种机械和机构中得到广泛应 用。
平面四杆机构的应用
01
02
03
曲柄摇杆机构
用于将曲柄的转动转化为 摇杆的往复摆动,如搅拌 机、榨汁机等。
双曲柄机构
用于实现两个曲柄的等速 转动,如机械式钟表的秒 针机构等。
双摇杆机构
用于将两个摇杆的往复摆 动转化为另一个摇杆的往 复摆动,如雷达天线驱动 机构等。
详细描述
经典创意版四杆机构习题答案.ppt

4
4.如将杆4的长度改为d=400mm,其它各杆长度不变,则分别以1、 2、3杆为机架时,所获得的机 构为( 双摇杆 )机构?
a 240mm,
b 600mm c 400mm,
d 400mm.
a b 240 600 840 c d 400 400 800
b
2
B
a1
d
A
C
3c
A
B1 ω1
2
t
B2
空回行程
t 1 180 2 180
解:(1)曲柄为顺时针转向;
(2)该机构的死点位置为曲柄与连杆两次共线位置。
课件
例4 铰链四杆机构各杆杆长为: LAB=200mm,LBC=350mm, LCD=450mm, LAD=500mm。求:
1)该机构为何种类型机构?(要求写出判定条件)
)机构?
2.要使机构成为双曲柄机构,则应取杆( )为机架?
3.要使机构成为双摇杆机构,则应取杆( )为机架? 且其
长度的允许变动范围为(
4.如将杆4的长度改为d=400mm,
其它各杆长度不变,则分别以1、
2、3杆为机架时,所获得的机
构为(
)机构? 课件
)
b
2
B
a1
d
A
C
3c
D
4
1.当取杆4为机架时,是否有曲柄存在?若有曲柄存在,杆( 1 ) 为曲柄?此时该机构为( 曲柄摇杆)机构?
min
D
课件
例5 假设图示导杆机构各部尺寸为已知,求:
n
1 . 该机构曲柄存在的条件;
2 . 图示位置机构的压力角和传动角;
3. 摆动导杆的最大摆角ψ和极位夹角θ;
四杆机构设计ppt课件

自测试题
一、 判断题(正确:T,错误:F)
1.平面连杆机构是低副机构,其接触处压强较小,因 此适用于受力较大的场合。
2.铰链四杆机构通过机架的转换,就一定可以得到曲 柄摇杆机构、双曲柄机构和双摇杆机构。
3.铰链四杆机构如有曲柄存在,则曲柄必为最短构 件。
4.在曲柄滑块机构中,当曲柄为主动件时,机构没
21
5.平行四边形机构的极位夹角=___ ,它的行程速比系 数K____。 6.铰链四杆机构演化成其它形式的四杆机构常有三种 方法,它们是______、________和_______。 7.一对心曲柄滑块机构,若以滑块为机架,则将演化 成___________机构。 8.曲柄为主动件的曲柄摇杆机构中,当从动摇杆处于 两极限位置时,________在该位置所夹的锐角,称 为极位夹角。
14
2)用作图法按两连架杆预定的对应位置 设计四杆机构 设计方法是:此类问题刚固反转法进行设计 (重点)
15
3)按预定的连杆位置设计四杆机构:
已知:连杆BC的三个预定位置B1C1、B2C2和B3C3 设计的实质是:求固定铰链中心的位置 设计方法是:此类问题可用求圆心法来解决,即作 铰链B各位置点连线B1B2 、B2B3的中垂线,两中 垂线的交点即为固定铰链中心A。同理,作铰链C 各位置点连线C1C2、 C2C3的中垂线,两中垂线的 交点即为固定铰链中心D。
9.铰链四杆机构中,_____角越大,对机构的传动越 有利。
22
10.死点是指不计摩擦时机构所处的特殊位置,可借 助_____或采用_____的方法使机构能顺利通过死点 位置而正常运转。
三、选择题
1.下面
不是平面连杆机构的优点。
A. 运动副是面接触,故压强小、耐磨损;
四杆机构习题

一、二章习题一.简答题1.机械的组成部分有?2.机器的三个特征?3.机构与机械的主要区别?4.机械零件的常见失效形式有?5.机械设计应满足的基本要求有?6.什么叫低副,什么叫高副?7.说出机构运动简图的绘制步骤。
8.什么是曲柄?什么是摇杆?9.铰链四杆机构存在曲柄的条件?10.判断铰链四杆机构类型的原则有?11.什么叫铰链四杆机构的传动角和压力角?压力角的大小对连杆机构的工作有何影响?12.什么叫行程速比系数?如何判断机构有否急回运动?二. 填空1.机构是____的基本单元,而零件是____的基本单元。
2.平面连杆机构由一些刚性构件用____副和____副相互联接而组成。
3. 在铰链四杆机构中,固定不动的杆件称为_______,与固定不动的杆件直接用转动副相连接的杆件称为_______,不与固定不动的杆件直接连接的杆件称为_______,能作整周连续旋转的构件称为_______,只能来回摇摆某一角度的构件称为_______,4. 图1-1为铰链四杆机构,设杆a最短,杆b最长。
试用符号和式子表明它构成曲柄摇杆机构的条件:.(1)____________________________。
(2)以_______为机架,则_______为曲柄。
5. 设图1-1已构成曲柄摇杆机构。
当摇杆CD为主动件,机构处于BC与从动曲柄AB共线的两个极限位置,称为机构的两个_______位置。
6. 铰链四杆机构的三种基本形式是_______机构,_______机构,_______机构。
7. 平面连杆机急回运动特性可用以缩短_______。
从而提高工作效率。
8. 四杆机构中若对杆两两平行且相等,则构成_______机构。
9.压力角和传动角互为角。
10.当机构的传动角等于00(压力角等于900)时,机构所处的位置称为位置。
三、判断题1、当机构的极位夹角θ=00时,机构无急回特性。
()2、机构是否存在死点位置与机构取那个构件为原动件无关。
机械原理课件之四杆机构受力分析
通过解方程,求解出各个连杆的受力大小和方向。
四杆机构受力分析的案例研究
案例1
案例2
分析一台工业机械中的四杆机构, 确定各个连杆的受力情况。
在一个机器人手臂中应用四杆机 构,研究其受力和应力分析。
案例3
通过受力分析,优化四杆机构的 设计,提高其工作效率。
结论和总结
四杆机构受力分析是机械工程领域的重要研究方向之一。它不仅可以帮助我 们了解四杆机构的工作原理,还可以指导我们设计更优秀的机械系统。
四杆机构的组成和基本结构
连杆
四杆机构由四根连杆组成,包括两个边连杆和两个角连杆。
铰链
连杆通过铰链连接,使得四杆机构能够实现运动。
驱动装置
驱动装置为四杆机构提供动力,使其能够完成特定任务。
四杆机构的运动分析
1
自由度
四杆机构的自由度取决于连杆的个数和铰链的类型。
2
运动类型
四杆机构可以实现旋转、平动和复杂的运动。
3
工作轨迹
通过对四杆机构的运动分析,可以得到工作轨迹的方程。
四杆机构受力分析的基本原理
四杆机构受力分析的基本原理是根据静力学的原理,通过分析力的平衡条件 来确定各个连杆的受力情况。
四杆机构受力分析的方法和步骤1 建立坐标系确定来自适的坐标系,便于受力分析的计算。
2 列写平衡方程
根据力的平衡条件,列写各个连杆的受力方程。
机械原理课件之四杆机构 受力分析
这篇课件将详细介绍四杆机构的受力分析。从概述四杆机构的基本原理开始, 到运动分析和受力分析的具体方法,最后通过案例研究加深理解。让我们一 起来探索吧!
四杆机构的概述
四杆机构是一种常见的机械连杆机构,由四根连杆组成。它具有简单的结构 和广泛的应用领域,是研究机械原理的重要组成部分。
机械原理之四杆机构受力分析(课堂PPT)

Ft
R63
Fn
R63
a
G5
F
t R63
FR45 Fr
f
F
n R12
F
n R63
f
F
t
R12g
FR63 FR43
f
FR32
FI5
FR12 F R21 G2
h
FI2
e
FR65
Fb
FR61
b
c
.
i
4
F S5 5
aF
Fr
FI5
G5
F R65
F R45 F S5 5 Fr
FI5
x
G5
B
FR21
1G F
A
11b x
式中 xI, yI——力作用点I的坐标,
xK, yK——取矩点K的. 坐标。
17
4) 各构件的力平衡方程式
•对于构件1分别根据
•对于构件2有
•对于构件3有
可得
.
18
以上共列出九个方程式,故可解出上述各运动副反力和平衡力的九个力
的未知要素。又因为以上九式为一线性方程组,因此可按构件1、2、3上待 定的未知力Mb, R41x, R41y, R12x, R12y, R23x, R23y, R34x, R34y的次序整理成以下的 矩阵形式:
2
Ft
R12
B
FI2 h2 2
S2
G2
C
3
F R45 F S5 5
Fr
FI5
E
G5
h3 F R43
二力杆,且有:
Fn
R12
h2
D
F R54 F R34
Ft
R63
铰链四杆机构试题参考答案
1.平面连杆机构中的运动副均是低副,因此平面连杆机构是低副机构。
2.构件间用四个转动副相连的平面四杆机构,称为平面铰链四杆机构。
3.铰链四杆机构中曲柄存在的条件是:连架杆与机架中必有一个是最短杆和最短杆与最长杆长度之和必小于或等于其余两杆长度之和,两条件必须同时满足。
4.连杆与机架的长度相等、两个曲柄的长度相等且转向相同的双曲柄机构,称为平行四边形机构。
5.曲柄滑块机构是由曲柄摇杆机构演化而来的。
6.若导杆机构机架长度l1与曲柄长度l2的关系为l1<l2则构成转动导杆机构。
7.铰链四杆机构中最短杆与最长杆长度之和大于其余两杆长度之和时,则不论取哪一杆作为机架,均能构成双摇杆机构。
8.家用缝纫机的踏板机构属于曲柄摇杆机构,主动件是踏板(摇杆)。
9.单缸内燃机属于曲柄滑块机构,它以活塞(滑块)为主动件。
10.平面连杆机构中的摇杆往复摆动时所需时间一般并不相同,要求返回空行程明显快于工作行程急回特性。
一、判断题1.平面连杆机构各构件的运动轨迹一定在同一平面或相互平行的平面内。
(√ ) 2.在曲柄长度不相等的双曲柄机构中,主动曲柄作等速回转时,从动曲柄作变速回转运动(√ )3.在曲柄摇杆机构中,摇杆两极限位置的夹角称为极位夹角。
(× )4.铰链四杆机构中的最短杆就是曲柄。
(× )5.偏心轮机构的工作原理与曲柄滑块机构的工作原理相同。
(√ )6.当机构的极位夹角θ=00时,机构无急回特性。
(√ )7.极位夹角口愈大,机构的急回特性愈不明显。
(× )8.偏心轮机构不存在死点位置。
(√ )9.曲柄摇杆机构,双曲柄机构和双摇杆机构,它们都具有产生“死点”位置和急回运动特性的可能。
(×)10.铰链四杆机构各杆的长度分别为a=175mm,b:150mm,c。
135mm,d=190mm,分别以不同杆件作为机架,该机构一定能构成三种基本类型的铰链四杆机构。
(√ )11.在曲柄摇杆机构中,空回行程比工作行程的速度要慢。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工作行程
b
C
d
B
C C
m i n
m i n
D
37
0
e ω
h
38
解:1 求A、D 铰链点
B1 Ⅰ
课后作业:8-23~8-28
C1
Ⅱ
B2
C2
23
2 设计检验 (1 )炉门闭启时是否与炉
外壁干涉 从位置Ⅰ到位置Ⅱ是炉门 开启的过程。检验E点是否 与炉外壁干涉。
课后作业:8-23~8-28
E B1 Ⅰ
A C1 B2
Ⅱ C2
D
24
2 设计检验
(1 )炉门闭启时是否与炉 外壁干涉
B1 B2B2
A
MM2M1 2
B2
D 2
B2
B22
C1
M2 M2 M22
D
32
例13 已知曲柄AB平面上某一直线AE的两个位置的AE1 、 AE2的
两个位置C1 、 C2 。试设计一曲柄滑块机构,要求曲柄的长度 LAB最短(直接在图上作图,保留作图线,不写作图过程)
ห้องสมุดไป่ตู้
E1 E2
B1
125
C1
C2
60 A
长度的允许变动范围为(
)
a24m0,m
解:1 ) a杆为最短杆,C杆为最长杆时 b60m0m
acbd 满足曲柄存在条件
c40m0,m
cbda60 500 204 80 6m0md50m0.m
2) 假设C杆为最短杆,则有:
b
2
cb> ad 不满足曲柄存在条件 B
c> adb 2 4 5 0 6 0 1m 0 4 aA10 md
26
(3)验算炉门 的稳定性
l P24
在位置Ⅰ重力
G对瞬心的力 矩有使炉门打 A
B1
Ⅰ
开的可能,故 应在操作柄上
加定位卡。
G C1
4 B2
ω
Ⅱ
C2
在位置Ⅱ重力G对 3 瞬心的力矩与炉门 关闭的转向相反, 故不会自动关闭。
D
B1
A P14
Ⅰ
C1
2
4 B2 P12
G
D 4 P34
ω P23Ⅱ
C2
P24
B
blC D lA D a
bea
a
机架LAB不为最短杆,曲柄为LBC杆
2)按双摇杆机构演化
blC DalA D
A
blC D lA D a
bea 曲柄摇杆机构
3)机构演化原型 双摇杆机构
bC e
P
D∞
D∞
19
例8 接上题.设b杆为主动构件求该位置时机构的压力角和传 动 角。
Bb
a Ae
C
F
γmin VC3
C 2
33
例14图示六杆机构。已知LCD =2 LDE =100mm, LEF =150mm,滑块
行程S=50mm。图示滑块处于右极限位置,无急回运动。试 确定机架、曲柄、连杆长度;并在图中找出机构的最小传动角γmin
A
B
C
E
30°
60°
D
F
34
试确定机架、曲柄、连杆长度
lAB ABl
lBC BCl
例1 求下列曲柄滑块机构该位置的压力角α、传动角γ, 最小压力角位置,冲程H、极位夹角θ。设曲柄主动。
1 A
2 F 3
α
1
A
1
(a)
2
m in
3
2
m in
min
min
1
求冲程H、极位夹角θ。
0
1
23
1
12
2
33
H
例 求下列曲柄滑块机构的冲程H、极位夹角θ,正、反行程。
B
1
A
2
3
e
C
2
B2
A
柄的合理转向,并简述其理由;
(2)若滑块为主动件,使用作图法确定该机构的死点位置。
工作行程
t
Bt
1
C1
C2 C
A
B1 ω1 2
t
B2
空回行程
t 118 0 218 0
解:(1)曲柄为顺时针转向;
(2)该机构的死点位置为曲柄与连杆两次共线位置。
9
例4 铰链四杆机构各杆杆长为: LAB=200mm,LBC=350mm, LCD=450mm, LAD=500mm。求:
3) 假设C杆为一般杆,则有:
b
abdc abcd
2
cabd
cabd B
c 2 460 0 50 0c 0 2 460 0 50 0 a10 d
c34m0m c34m0m A
不满足曲柄存在条件 满足曲柄存在条件
C
3c
D
4
7
4.如将杆4的长度改为d=400mm,其它各杆长度不变,则分别以1、 2、3杆为机架时,所获得的机 构为( 双摇杆 )机构?
B
1
b
F12 C
2
a e
P FF2332
V
3 A
4
0
90
20
例9 图示为一六杆机构。杆BC 为原动件,其长度LBC =40mm,
滑块E的行程H=50mm,行程速比系数K=2,要求最小传动 角γmin=60°。试确定各构件的长度。
解:1 取长度比例尺作机构图
l
1
mm mm
C B
A
E
D
示意图
21
r lBC
C
3c
D
4
6
3.要使机构成为双摇杆机构,则应取杆( 3 )为机架? 且其
长度的允许变动范围为( 140<a ≤860 )
1 ) a杆为最短杆,C杆为最长杆时
a24m0,m
c86m0m满足曲柄存在条件
b60m0m
2) 假设C杆为最短杆,则有:
c40m0,m
c14m0m 不满足曲柄存在条件 d50m0.m
3.要使机构成为双摇杆机构,则应取杆( )为机架? 且其
长度的允许变动范围为(
4.如将杆4的长度改为d=400mm,
其它各杆长度不变,则分别以1、
2、3杆为机架时,所获得的机
构为(
)机构?
)
B
a1
A
b
2
d
C
3c
D
4
4
1.当取杆4为机架时,是否有曲柄存在?若有曲柄存在,杆( 1 ) 为曲柄?此时该机构为(曲柄摇杆)机构?
a24m0,m
b60m0m c40m 0,m
b
C
B
2
3c
d40m0.m
a1
A
a b 2 4 60 0 80 40
d
D
4
c d 4 0 40 0 80 00
abcd 不满足曲柄存在条件
无论取哪个杆件为机架,均只能得到双摇杆机构
8
例3 图示曲柄滑块机构是按比例绘制而成的。
(1)设曲柄为主动件,滑块朝右运动为工作行程,试确定曲
1)该机构为何种类型机构?(要求写出判定条件)
2)不改变各杆杆长,如何将该机构演化为双摇杆机构?
3)在图上标出极位夹角θ,;最小传动角γmin ;
4)AB杆的转向;
正行程
解:1) L A B L A D L B C L CD
C
2 0 5 0 0 3 0 5 40 50 B
该机构为曲柄摇杆机构,
曲柄为AB 杆。
解:根据杆长条件: a b 2 4 60 0 80 40
a24m0,m c d 4 0 50 0 90 00b
C
b60m0m ab< cd B
2
3c
c40m0,m
a1
d
D
d50m0.m
A
4
2.要使机构成为双曲柄机构,则应取杆( 1)为机架?
5
3.要使机构成为双摇杆机构,则应取杆( 3 )为机架? 且其
从位置Ⅰ到位置Ⅱ是炉门 开启的过程。检验E点是否 与炉外壁干涉。
P24
E
P12 B1
VE
1
A P14
Ⅰ 2 C1 P23
4 B2
ω
Ⅱ C2
3
D P34
25
(2)验算最小传动角
m inm in 27
B
B1
1
A
Ⅰ 2
C1 C Ⅱ
m in B 4 B2
C2
课后作业:8-23~8-28
m in
3
D
3
27
例11图中给出了连杆 2 杆线BC 的两个位置并 B1C1 、 B2C2 ,并给 出了连架杆1的相应的顺时针转角φ12和连架杆3的逆时针转角ψ12
设计此四铰链机构
D
12
12 2
B1
B2
2
C2
90 12
2
12 12 22
A 课后作业:8-23~8-28
C1
90 12
2
28
例12试设计一铰链四杆机构,要求满足AB1 、 AB2与DE1 、 DE2 两组对应位置,并要求满足摇杆CD在第二位置为极限位置。 已知和LAB和LAD (在图中已按比例画出),试用作图法确定 铰链C 的位置。要求注明四杆机构ABCD。
Aa b
B
C
B’
lADlC D lABlB C lADlAB60mm
D
C
A
B
D
17
例 7图 (a)、(b)两导杆机构。问: (1)图(a)若为转动导杆机构导杆,其演化原型是什么? (2)图(a)偏置导杆机构成为转动导杆机构的条件; (3)图(b)中AP 不为转动导杆的条件。其演化原型?