TZID-C-instruction(new)
多维精控

应用范围 : 本产品设计制造用于普通工业应用,超出预料的用途或对人的生命或财产造成重大影响 的场合不在本产品应用和服务的范围。 一、简介 表格设置定时程序控制器(以下简称:控制器)是通用型程序控制器,无需编程,也不 需要类似可编程控制器(PLC)那样设计梯形图, 而是采用填表设置的方法代替繁琐的编程 工作,操作使用非常方便,被称为:无需编程的“PLC”。在实际应用中只要知道所控制设备 的工作原理、需要达到的功能、如何让设备动作或运行,而进行简单的填表设置操作,即可 快速实现所需的应用功能,达到程序控制设备或电器自动运行的目的。 控制器的前后分别设有两排接线端子,前面一排是输入端子,后面一排是输出端子,前 排端子旁设有一个下载接口,面板上设有 1 个电源指示灯 POW 、1 个运行指示灯 RUN、8 个输 入指示灯和 8 个输出指示灯,输入指示灯显示每个输入端的输入状态,输出指示灯分别显示 每个输出端的状态,输出有效时指示灯亮。 定时程序控制器的应用功能是根据所需要的功能,在功能设置表上进行设置,设置完毕 下载到控制器中,即可独立运行实现所设置的功能。设置的功能可以反复设置重复下载,下 载不同功能的设置数据,控制器的功能随之改变为新的功能,操作使用十分方便、快捷。下 载到控制器中的数据可长期保存,不受停机掉电的影响,稳定可靠。 在功能设置表中可以方便地设置≥60 行的程序行功能参数,每行程序都可以设置独立的 定时时间、连接不同的输出通道 Yn 和选择不同的输入控制端 Xn,以及设置需要转移的程序 行号或需要控制的程序行。 本产品最突出的特点是:操作便捷、简单易用,显著降低应用过程的难度和周期。 主要特点: 1、表格设置、无需编程,人人都会使用。 2、操作便捷、简单实用,易于普及推广应用。 3、提供为用户编制专用程序的服务。
蒂森控制板操作器说明书

DIAGNOSTIC UNIT IFunction 01 00 Display of error stack as per:05.00显示故障堆栈 Example:ErrorExplanationWeighting BW任务特N emergency stop 紧急停梯 landing 楼层S stopping 停止undefined 未定义M spontaneous message 自发信息 explanations from page 21 解释21页B lift blocked 电梯被锁定ZZ Number of marking flag 标志编号..B operation phase 运行阶段Significance: Frequency levels of error: 含义:故障频繁度Level 1 infrequent 1度不频繁1) can be suppressed with switch 6S1 on circuit board MZ or with switch S5 on circuit board MZ1.1) Dependenton the function involved, reset can either mean emergency stop following by adjusting run or stopping of the lift installation2) Handshake is defined as cyclical data exchange (telegram) between two data carriers.1) SR module can be masked out via teach-in mode function AF 0d. Running-open operation and re-levelling with door open is not possible.1) Error from TCI work program 03.89/7 – no longer used.2) Error 35 00 and 3b 00 can no longer occur from work program 02.87/4 and error 36 00 can no longer occur from 06.95/25.1) SR module can be masked out through teach-in-mode function AF 0d. N Runnin-open operation andre-levelling with open door not possible.2) 0C 04 to 0C 0C leads also to stopping, if not provided otherwise in the lift-specific EPROM !1) If errors 65 00 to 74 00 occur more than 3 times, error 4F 00 will follow afterwards, which leads tospontaneous message and stopping1) DSP is the digital signal processor in the CPI controller2) Handshake is defined as cyclical data exchange (telegram) between two data carriers.Explanations of the existing error code numbers04 NN TCI control – Interrogation of ZSE solenoid switchesNN is represented as a hexadecimal number; in the event of errors, it indicates the number of ZSE switches (no other than the ZSE switch of the car position may be actuated).04 00 applies to ZSE 25 t o ZSE 3104 00 applies to ZSE 17 t o ZSE 2404 00 applies to ZSE 9 to ZSE 1604 0C applies to ZSE 1 to ZSE 8Example: 0 4 0 CHexadecimal number 0C∣∣Binary number 0 0 0 0 1 1 0 0∣∣∣∣∣∣∣∣assigned ZSE switch 8 7 6 5 4 3 2 1The example shows that ZSE switches ZSE3 and ZSE4 (in 3. and 4. landing) havebeen activated. (Also compare hexadecimal code in part 4, page 2)04 NN TCM control – Interrogation of ZSE solenoid switchesIf ZSE switches are closed in the third and fourth landing, the TCM controlwill file two errors: 04 03 und 04 0406 XX TCI control–Door locking not possible (from work program version 08.91/9)The lift will be put out of service for 15 min. after 3 unsuccessful doorlocking attempts. A new locking attempt will be initiated after expiry ofthis period of time.XX = StandortDoor variant – hinged door:A new locking attempt will also be made within these 15 min. after opening ofthe landing door (TK open) and closingit again (TK closed).Door variant D4 (with mechanical locking device)A start attempt will be enabled within 15 min., as soon as the controlreceives the bolt contact.06 XX TCM control–Door locking not possibleIf open bolt contact is recognized in the command chain preceding theposition the following error will follow14 XX (XX = bolt contact main side)18 XX (XX = bolt contact rear side)09 NN Car will be blocked in the landing >4 minExample LED Signal name (LED display on diagnostic unit Irow A)0 KKD0 LSD1 KK O.K.1 LS O.K.0 TSUD0 TSOD0 TSU1 TSO activatedFor LEDs and signal names see Operating Instructions of Diagnostic Unit I,function 05 00, column 0d (display of predefined memory locations, from page25).19 NN Door zone not detectedExample 1 9 C 81 VR1 A5A0 TO0 TU1 FL0 FS0 FO0 FUIn the operation phase STOP (lift at standstill), the CPU recognizes that thedoor zone calculated from the landing vanes was left.For LEDs and signal names see Operating Instructions Diagnostic Unit Ifunction 05 00, column 05 (display of predefined memory locations,from page25)1d NN Emergeny stop (wrong run direction)No run direction or both run directions were produced with the run contactoractivated and the brake disengaged.For LEDs and signal names see Operating Instructions, Diagnostic Unit I,function 05 00, column 05 (display of predefined memory locations from page25).In case of error 1d C8 the processor outputs the signals VR, A5A and FL (butwithout run directions); compare above representation of error 19 NN1E NN Deceleration not effectiveBinary display of car positionIt will be examined whether deceleration has been initiated already onreaching the marked terminal landing vanes.The position is indicated by the five bitst 20 to 25 as binary number.Example:27FO (run direction UP)26FU activated (run direction DOWN)252423Position (hexadecimal number converted into22binary number)211 201 E 9d: bits 20 to 27 stand for landing 29, therefore only run direction UPexists, since 26 = 0 and 27 = 1, and consequently 9 d will follow.Function 02 00 Display of order number (fromTCI work program version 06.88/6 and with TCM)显示定单号码(从TCI 06.88/6版工作程序起以及TCM梯)Example: Order No.: 27 70 06 42 10∣∣∣∣∣LED 5 12 3 10 1B A B A BFunction 03 00 Position indicator (decimal)楼层显示(十进制)Function 04 00 Operation phaseFunction 05 00 Display of specified memory locations1) Set function 05 00 with program selector wheel2) Press start-stop button3)Select desired column in 7-segment display with program selector wheelExample: Column 0d is desired. For example, select 0C 0d in 7-segment display, then left LED row B applies to column 0C and right LED row A applies to column0d, etc.4) Interrogate LED display (compare overview and signal description)5) Exit: press start-stop button for longer than 2 s.The LEDs listed in the table will light on selecting the respective column (Col) :1) Error markingExtension of columns for TCM control with MC1 or MC2 circuit boards1) pulses are counted dependent on the run direction (20 to 27 is displayed in LED row A/B)1) will be displayed as hexadecimal number in LED row A. Example: 09 in LED row A LEDs 0000 1001 light up2) displays last failure before current failure cause column 2C. Is displayed in hexadecimal numbers as in column 2C1) MF3 (VA) stands for circuit board MF3 with double-sided insertion 1) MF3 (VA) stands for circuit board MF3 with double-sided insertion1) MF3 (VA) stands for circuit board MF3 with double-sided insertion1) not assigned currently.Function 07 00 Display of parameters of CPI controller (only with TCM controls) 显示CPI。
大连数控18Ti 操作说明书

3.7 附录 ......................................................................................................................... 31
3.7.1 报警一览表 ....................................................................................................... 31
18Ti 操作说明书
大连高金数控有限公司 2008 年 12 月
1
18Ti CNC 资料---操作说明书手册 1 简介 .................................................................................................................................. 1
I
18Ti CNC 资料---操作说明书手册 4.4 伺服参数 .................................................................................................................. 50
3.3.1 操作步骤........................................................................................................... 25
3.3.2 MDI 运行.......................................................................................................... 27
解决引导内核遇到undefinedinstruction的错误

解决引导内核遇到undefinedinstruction的错误其实在上⼀篇随笔之前,就是在启动linux 内核的时候,出了点问题刚Starting kernel ...就出现了undefined instrction,这是什么问题呢?在⽹上也搜了不少资料,有两篇很有启发就是这两篇。
我们先来了解下mkimage这个命令,重要关注loadaddress和entry address./mkimage -A arch -O os -T type -C comp -a addr -e ep -n name -d data_file[:data_file...] image-A ==> set architecture to 'arch'-O ==> set operating system to 'os'-T ==> set image type to 'type'-C ==> set compression type 'comp'-a ==> set load address to 'addr' (hex)-e ==> set entry point to 'ep' (hex)-n ==> set image name to 'name'-d ==> use image data from 'datafile'-x ==> set XIP (execute in place)mkimage是将zImage之前加上64字节的镜像头所以如果使⽤mkimage⽣成内核镜像⽂件的话,会在内核的前头加上了64byte的信息,供建⽴tag之⽤。
bootm命令会⾸先判断bootm xxxx 这个指定的地址xxxx是否与-a指定的加载地址是否相同。
EDP300智能电气阀门定位器的原理和使用_libaohua
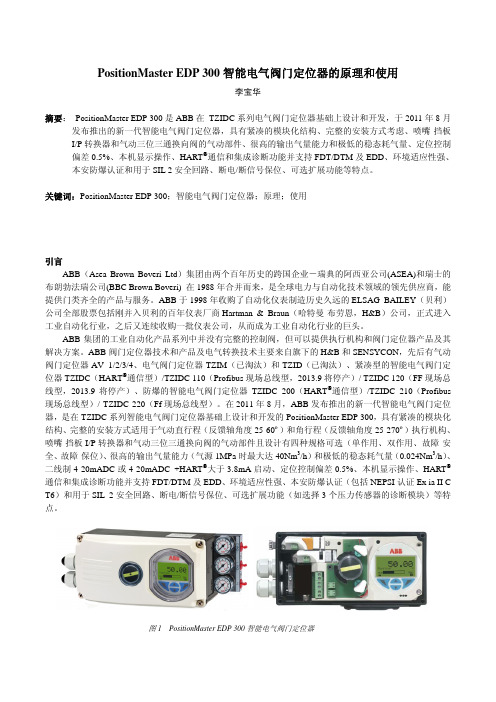
PositionMaster EDP 300智能电气阀门定位器的原理和使用李宝华摘要:PositionMaster EDP 300是ABB在 TZIDC系列电气阀门定位器基础上设计和开发,于2011年8月发布推出的新一代智能电气阀门定位器,具有紧凑的模块化结构、完整的安装方式考虑、喷嘴-挡板I/P转换器和气动三位三通换向阀的气动部件、很高的输出气量能力和极低的稳态耗气量、定位控制偏差0.5%、本机显示操作、HART®通信和集成诊断功能并支持FDT/DTM及EDD、环境适应性强、本安防爆认证和用于SIL 2安全回路、断电/断信号保位、可选扩展功能等特点。
关键词:PositionMaster EDP 300;智能电气阀门定位器;原理;使用引言ABB(Asea Brown Boveri Ltd)集团由两个百年历史的跨国企业-瑞典的阿西亚公司(ASEA)和瑞士的布朗勃法瑞公司(BBC Brown Boveri) 在1988年合并而来,是全球电力与自动化技术领域的领先供应商,能提供门类齐全的产品与服务。
ABB于1998年收购了自动化仪表制造历史久远的ELSAG BAILEY(贝利)公司全部股票包括刚并入贝利的百年仪表厂商Hartman & Braun(哈特曼-布劳恩,H&B)公司,正式进入工业自动化行业,之后又连续收购一批仪表公司,从而成为工业自动化行业的巨头。
ABB集团的工业自动化产品系列中并没有完整的控制阀,但可以提供执行机构和阀门定位器产品及其解决方案。
ABB阀门定位器技术和产品及电气转换技术主要来自旗下的H&B和SENSYCON,先后有气动阀门定位器AV 1/2/3/4、电气阀门定位器TZIM(已淘汰)和TZID(已淘汰)、紧凑型的智能电气阀门定位器TZIDC(HART®通信型)/TZIDC 110(Profibus现场总线型,2013.9将停产)/ TZIDC 120(FF现场总线型,2013.9将停产)、防爆的智能电气阀门定位器TZIDC 200(HART®通信型)/TZIDC 210(Profibus 现场总线型)/ TZIDC 220(Ff现场总线型)。
linux interlockedincrement -回复

linux interlockedincrement -回复如何在Linux系统中使用InterlockedIncrement函数实现原子操作在Linux系统中,原子操作是很常见的,尤其在多线程编程中频繁使用。
原子操作是指不可被中断的操作,能够在同时运行的多个线程中保证数据的一致性和线程安全。
在C和C++编程中,InterlockedIncrement是一个函数,能够实现原子的增加操作。
本文将逐步介绍在Linux系统中如何使用InterlockedIncrement函数实现原子操作。
步骤一:了解InterlockedIncrement函数InterlockedIncrement函数是Windows API中的一个函数,在Windows 系统中广泛应用于多线程编程。
但在Linux系统中,并没有类似的函数。
幸运的是,Linux提供了一些其他的API函数来实现原子操作,其中就包括了InterlockedIncrement功能。
在Linux中可以使用__sync_fetch_and_add函数来实现类似的原子增加操作。
步骤二:创建一个包含多个线程的程序为了展示InterlockedIncrement函数的使用方法,我们需要创建一个包含多个线程的程序。
这可以通过使用pthread库来实现。
首先,我们需要定义一个全局变量,用于线程之间共享数据。
我们将使用InterlockedIncrement函数来对这个变量进行原子增加操作。
c#include <stdio.h>#include <pthread.h>int globalVariable = 0;void* threadFunc(void* arg) {for (int i = 0; i < 100000; i++) {__sync_fetch_and_add(&globalVariable, 1);}return NULL;}int main() {pthread_t thread1, thread2;pthread_create(&thread1, NULL, threadFunc, NULL);pthread_create(&thread2, NULL, threadFunc, NULL);pthread_join(thread1, NULL);pthread_join(thread2, NULL);printf("Global variable value: d\n", globalVariable);return 0;}步骤三:编译和运行程序保存上述代码到一个文件,比如atomic.c,然后使用gcc编译该程序。
arm tzasc 用法 -回复

arm tzasc 用法-回复[tzasc用法] 一步一步回答[tzasc] 是一个ARM平台上的安全控制器,用于提供访问控制和权限管理。
它可以确保系统资源只被授权的实体访问,保护系统免受未经授权的访问和恶意软件的攻击。
在本文中,我们将一步一步介绍tzasc的用法,帮助您了解如何正确配置和使用它。
第一步:了解tzasc的基本概念要正确使用tzasc,首先需要了解一些基本概念。
tzasc使用了许多术语和概念,例如Security State、Secure Address Space、Security Domain等等。
通过了解这些概念,您可以更好地理解tzasc的工作原理,并能够正确地配置和使用它。
第二步:配置tzasc硬件要开始使用tzasc,您需要配置硬件实现。
tzasc的配置在ARM体系结构规范中定义。
配置可在硬件级别进行,通常通过设置相关的寄存器来实现。
配置的具体过程可能因硬件实现而异,因此您需要参考供应商提供的具体文档来获得更详细的信息。
第三步:设置安全状态tzasc依赖于安全状态来确定对系统资源的访问权限。
安全状态定义了系统中的安全域和实体,并为每个安全域分配了一组权限。
通过设置安全状态,您可以确保只有经过授权的实体才能访问系统资源。
第四步:配置安全域和权限一旦设置了安全状态,您可以配置安全域和权限。
安全域是指一个或多个相关实体所属的逻辑集合。
通过为每个安全域分配一组权限,您可以控制不同实体对系统资源的访问权限。
权限包括执行、读、写和执行特权指令等。
第五步:应用安全策略配置好安全域和权限后,您可以制定具体的安全策略。
安全策略是一组规则和控制策略,用于确保系统资源只被授权的实体访问。
安全策略可以包括限制访问某些资源、白名单和黑名单等。
第六步:监控和审计配置和应用安全策略后,您可以启用监控和审计机制来跟踪和记录系统中发生的安全事件。
监控和审计允许您检测和分析潜在的安全威胁,以及跟踪实体的行为。
linux i2c注册流程
linux i2c注册流程Linux I2C注册流程I2C(Inter-Integrated Circuit)是一种串行通信协议,用于连接在计算机系统中的多个外部设备。
在Linux系统中,I2C总线的设备驱动程序通过I2C核心子系统进行注册和管理。
本文将介绍Linux I2C注册流程的具体步骤,帮助读者了解Linux系统中I2C设备的注册过程。
1. 硬件连接和配置在开始之前,首先需要进行硬件连接以及相关I2C控制器的配置。
通常,I2C总线上的每个设备都有一个唯一的7位或10位地址。
在Linux系统中,I2C控制器通过设备树(Device Tree)或Platform数据结构进行配置。
根据硬件和芯片特定的要求,需要指定控制器的一些参数,例如时钟频率、地址模式等。
2. I2C核心子系统I2C核心子系统是Linux内核中用于管理I2C设备的模块,包含了驱动程序和各种API函数。
它将I2C设备的操作进行了抽象,并提供了一组统一的接口供驱动程序使用。
I2C核心的代码位于"drivers/i2c"目录下。
3. I2C驱动程序I2C设备驱动程序是一种与特定硬件相关的内核模块,用于与I2C设备进行通信和控制。
驱动程序的代码一般位于"drivers/i2c/busses"目录下。
Linux内核已经提供了一些通用的I2C驱动程序供使用,例如“i2c-gpio”用于模拟I2C总线。
4. I2C设备结构体在编写自定义I2C驱动程序之前,需要定义一个I2C设备结构体。
该结构体用于描述设备的各种属性,包括设备的名称、地址、信号模式以及设备特定的配置等。
通常可以基于设备树或Platform数据结构进行初始化。
5. I2C适配器I2C适配器是用于控制I2C设备的总线控制器。
在Linux系统中,每个适配器都对应一个I2C控制器,通过/sys/bus/i2c/devices目录进行管理。
适配器结构体定义了适配器和它管理的设备之间的关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TZID-C智能定位器安装及操作说明书ABB (中国)自动化有限公司仪器仪表总部Tel: 010 8456 6688Fax: 010 8456 7650气路连接∙使用与定位器气源端口处标识的标准接口连接气源∙连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)+1112(DC4---20mA Max.410)+3132(DC4---20Ma DCS+24V)+4142()+5152()+8182()+8384()+4142(5---11VDC, <8 mA)+5152(5---11VDC, <8 mA)调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):∙按住MODE键。
∙并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
∙松开 MODE键。
∙使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度∙两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在-28º--- +28º之内。
角行程应用范围在-57º--- +57º之内。
全行程角度应不小于25º4.切换至参数配置菜单∙同时按住⇧和⇩键Page2 of13∙点击ENTER键∙等待3秒钟,计数器从3计数到0∙松开⇧和⇩键程序自动进入P1.0配置菜单。
5.使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式(rotary):定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心,一般角位移为90º直行程安装形式(linear):定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º,用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
出厂时的缺省设置为:linear6.启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定):方法1:∙按住MODE键∙点击⇧键一次或多次,直到显示出“P1.1”∙松开MODE键∙按住ENTER键直到计数器倒计数到0∙松开ENTER键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。
∙自动调整程序顺利结束后,显示器显示“COMPLETE”。
∙参见步骤10,进行手动存储上述自动调整得到的参数。
方法2:∙按住MODE键(linear安装形式)或者ENTER(rotary安装形式)键3秒,直到出现“O o”∙松开MODE键(linear安装形式)或者ENTER(rotary安装形式)∙按住MODE键(linear)或者ENTER(rotary)键直到计数器倒计数到0∙松开MODE键(linear)或者ENTER(rotary)键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。
∙自动调整程序顺利结束后,会自动存储上述自动调整得到的参数,并自动切换控制方式到1.1 CTRL_FIX在自动调整过程中如果遇到故障,程序将被迫终止并显示出故障代码,根据故障代码即可检查出故障原因。
也可以人为地强制中断自动调整程序。
7.如有必要,进入“P1.2”调整控制偏差带8.如有必要,进入“P1.3”调整控制死区9.如有必要,进入“P1.4”测试设定效果。
10.存储设定结果:∙按住MODE键∙点击⇧键一次或多次,直到显示出“P1.5”∙松开MODE键∙用⇧或⇩键选择 NV_SAVE (若选择‘CANCEL’,此前所作修改将不予存储。
)∙按住ENTER键3秒直到计数器倒计数结束后松开前面所进行的设定和自动调整中所测得的参数将存储在EEPROM中,定位器转换到先前所选择的运行级操作模式。
运行级操作模式的选择1.0模式:自适应控制模式∙按住MODE键∙点击⇧键一次或多次,直到显示出“ 1.0 CTRL_ADP”∙松开MODE键∙显示器显示阀位百分数如“50.0% POSITION”1.1模式:固定控制模式∙按住MODE键∙点击⇧键一次或多次,直到显示出“ 1.1 CTRL_FIX”∙松开MODE键∙显示器显示阀位百分数如“50.0% POSITION”1.2模式:在执行器的实际全行程范围内手动控制∙按住MODE键∙点击⇧键一次或多次,直到显示出“ 1.2MANUAL”∙松开MODE键∙显示器显示阀位百分数如“50.0% POSITION”∙使用⇧或⇩键进行手动控制。
先按住⇧键,再按住⇩键(始终按住⇧键),执行器将快速开启先按住⇩键,再按住⇧键(始终按住⇩键),执行器将快速关闭1.3模式:在定位器的检测范围内手动控制∙按住MODE键∙点击⇧键一次或多次,直到显示出“ 1.3MAN_SENS”∙松开MODE键∙显示器显示返馈杆所处角度位置如“-15.0ºSENS_POS”∙使用⇧或⇩键进行手动控制。
先按住⇧键,再按住⇩键,执行器将快速开启先按住⇩键,再按住⇧键,执行器将快速关闭请参阅附后功能表总图参数设定举例:将阀门的正作用改为反作用(定位器初始设定适合于正作用阀门,如实际驱动的阀门为反作用型式即阀杆上行关闭阀门,则需确认P2.3=Reverse)一般的阀门出厂之前已经修改此参数无需用户再修改,但可以通过下述方法检查。
定位器起始位置可以是运行模式中的任意方式1.切换至配置功能菜单∙同时按住⇧和⇩键∙点击ENTER键∙等待3秒钟,计数器从3倒计数至0∙松开⇧和⇩键∙显示器显示“P1.0 ACTUATOR”2.从配置功能菜单中选择第二组参数∙同时按住MODE和ENTER两键∙点击⇧键∙显示器显示“P2._ SETPOINT”∙松开 MODE和ENTER两键∙显示器显示“P2.0 MIN_PGE”3.从第二组配置参数中选择阀门作用方式P2.3∙按住MODE键∙点击⇧键3次∙显示器显示“P2.3 ACTION”∙松开MODE键4.更改阀门作用方式∙点击⇧键选择“REVERSE”5.切换至“P2.7 EXIT”存储并退出(如软件版本是2.0以上,则切换“P2.8 EXIT”)∙按住MODE键∙点击⇧键多次直至显示器显示“P2.7 EXIT”∙松开MODE键∙用⇧或⇩键选择 NV_SAVE∙按住ENTER键直到计数器倒计数结束后松开前面所进行的设定和自动调整中所测得的参数将存储在EEPROM中,定位器转换到先前所选择的运行模式.TZID-C系列智能定位器程序功能图解:1.功能级分类:运行操作级:适用于初次调试及日常维护中的检查或现场开关操作参数配置级:适用于初次调试中的参数设置及整定2.运行操作菜单:1.0 CTRL_ADP()1.1 CTRL_FIX()1.2MANUL()1.3MAN_SENS一般情况下选择1.1进行远方自动控制。
只有在执行器实际行程非常小而执行器速度太快,控制发生振荡时选择1.0控制模式,但其控制精度较低。
操作模式中的1.2和1.3均可运用键盘开启或关闭执行器,但1.2专用于手操,而1.3专用于检测定位器返馈杆实际运行范围是否超出传感器的最大检测范围,以便校正返馈杆的连接,取得最佳的控制效果。
3.参数配置级参数配置共分11组,用P1._,P2._---P11._(P为PARAMETER首字母)表示,而每一组又分若干项,如P1._分P1.0,P1.1,---P1.4共5项, P2._分P2.0,P2.1,----P2.7共8项。
有些项中又可分若干分项以供选择,如P1.0中可选择LINEAR用于直行程执行器,选择ROTORY用于角行程执行器。
又如P1.4 EXIT中可选择NV_SAVE(Non-V olatile save)存盘退出或CANCEL不存盘退出。
有些项中只有数值以供调整,如分程调节中给定信号为4—12 mA,则P2.0中的数值应设为4 mA,而P2.1中的数值应设为12mA.如给定信号为4—12 mA,则P2.0中的数值应设为20 mA,而P2.1中的数值应设为20mA.P1.0ACTUATOR P1.1 AUTO_ADJ P1.2 TOL_BAND P1.3 TESTP1._STANDARDP2.0 MIN_RGE (4mA)P2.1 MAX_PRG (20mA)P2.2 CHARACT P2.3 ACTION P2.4 SHUT-OFF P2.5 RAMP⋀P2.6 RAMP⋁P2._SETPOINTP3.0 MIN_RGE (0%)P3.1 MAX_RGE (100%)P3.2 ZERO_POS()P3._ACTUATORP4.0 TIME _OUT P4.1 POS_SW1P4.2 POS_SW2P4.3 SW1_ACTV P4.4 SW2_ACTVP4._MESSAGESP5.0 LEACKAGE P5.1 SP_RGE P5.2 SENS_RGE P5.3 CTRLER P5.4 TIME-OUT P5.5 STRK_CTR P5.6 TRAVELP5._ALARMSP6.0 MIN_VR P6.1 MAX_VR P6.2 ACTAUTOR P6.3 SPRNG_Y2P6._MAN_ADJP6.5 EXITP7.0 KP ⋀P7.1 KP ⋁P7.2 TV ⋀P7.3 TV ⋁P7.4 GOPULSE ⋀P7.5 GOPULSE ⋁P7.6 Y-OFFSET ⋀P7.7 Y-OFFSET ⋁P7.8 SENSITIV P7.9 TOL_BANDP7._CTRL_PARP8.0 MIN_RGE 4mA)P8.1 MAX_RGE 20mA)P8.2 ACTION 4mA0%P8.3 ALARM P8.4 TESTP8._ANLG_OUTP9.0 ALRM_LOG P9.1 SW1_LOG P9.2 SW2_LOG TESTP9._DIG_OUTP10.0 FUNCTION P10._DIG_INP11.0 FAIL_POS P11.1 FACT_SET P11.2 IP_TYPP11._FS/IPTZID-C 型I/P 电气转换器TZID-C 型定位器核心是微控制处理器CPU ,所有程序的处理运算皆在此。