第十章 齿轮系
机械原理 齿轮系
ω ω ω
的行星轮系, (4)对于 )对于F=2的行星轮系,需知 式中ω1 ,ω k ,ω H 三个角速 的行星轮系 度中任意两个的大小和方向,可求第三个的大小和方向. 度中任意两个的大小和方向,可求第三个的大小和方向. [例] Z1=30,Z2=20,Z2'=25,Z3=25, 例 , , , , 2 2' n1=100r/min, n3=200r/min,求 nH. 求 . 解: i H = n1 nH = (1)2 z2 z3 = 20× 25 = 2 13 H 3 1
中心轮
′ n3 n1 nH Z2Z3 33× 78 143 = =, = = n5 n3 nH ′ Z1Z2 24× 21 28
4.注意符号: 注意符号: 注意符号
z5 78 13 = = ′ z3 18 3
3.联立求解: 解得 n5=53.12rpm (n5 与n1同向 联立求解: 联立求解 同向)
ω1H ω1 ωH z2 zk (2)齿数比前一定要带"+"或"-"号, = )齿数比前一定要带" 或 号 iH =± = 1k H ωk ωk ωH z1 zk1 "±"号与轮系的结构有关. 号与轮系的结构有关. ± 号与轮系的结构有关
2 o2 H 1 3 2' 2 H 1
m
2' H 1 3
2
3 2 . . .(3) 4
将n2'=100/99,n4= -101/100代入(1),解得nH =+1/19800(rpm) 代入( ),解得 ( ) 代入 ),解得
′ z1 z5 101×1 101 ′ ′ n4 = n1 = 100 = ′ 4 100 × 100 100 z5 z ′
第十篇轮系
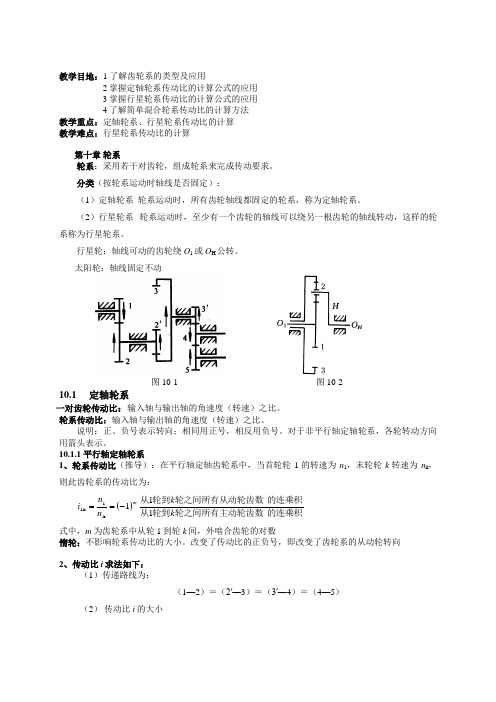
教学目地:1 了解齿轮系的类型及应用2掌握定轴轮系传动比的计算公式的应用 3掌握行星轮系传动比的计算公式的应用 4了解简单混合轮系传动比的计算方法 教学重点:定轴轮系、行星轮系传动比的计算 教学难点:行星轮系传动比的计算第十章 轮系轮系:采用若干对齿轮,组成轮系来完成传动要求。
分类(按轮系运动时轴线是否固定):(1)定轴轮系 轮系运动时,所有齿轮轴线都固定的轮系,称为定轴轮系。
(2)行星轮系 轮系运动时,至少有一个齿轮的轴线可以绕另一根齿轮的轴线转动,这样的轮系称为行星轮系。
行星轮:轴线可动的齿轮绕O 1或O H 公转。
太阳轮:轴线固定不动图10-1 图10-210.1 定轴轮系一对齿轮传动比:输入轴与输出轴的角速度(转速)之比。
轮系传动比:输入轴与输出轴的角速度(转速)之比。
说明:正、负号表示转向;相同用正号,相反用负号。
对于非平行轴定轴轮系,各轮转动方向用箭头表示。
10.1.1 平行轴定轴轮系1、轮系传动比(推导):在平行轴定轴齿轮系中,当首轮轮1的转速为n 1,末轮轮k 转速为n k ,则此齿轮系的传动比为:()的连乘积轮之间所有主动轮齿数轮到从的连乘积轮之间所有从动轮齿数轮到从k k n n i m 111k 11k -==式中,m 为齿轮系中从轮1到轮k 间,外啮合齿轮的对数惰轮:不影响轮系传动比的大小。
改变了传动比的正负号,即改变了齿轮系的从动轮转向2、传动比i 求法如下:(1)传递路线为:(1—2)=(2′—3)=(3′—4)=(4—5)(2) 传动比i 的大小()4543321245342312354433221511i i i i z z z z z z z zn n n n n n n n n n i ⋅⋅⋅=⋅⋅⋅-=⋅⋅⋅=='''''' (3)根据已知条件数学计算例10-1 在图10-1所示的齿轮系中,已知z 1=20,z 2=40,z 2' =30,z 3=60, z 3' =25,z 4=30,z 5=50,均为标准齿轮传动。
齿轮系ppt课件
.
8
车床走刀丝杠三星轮换向机构
转向相反
.
转向相同
9
3. 实现分路传动
此为某航空发动机附件传动系统。它可把发动机主轴 的运动分解成六. 路传出,带动各附件同时工作。 10
4. 实现大的传动比
若仅用一对齿轮实现较大的传动比,必将使两轮的尺寸 相差悬殊,外廓尺寸庞大,故一对齿轮的传动比一般不大 于8。实现大传动比应采用轮系。
i15=nn15
=i12•i2'3•i3'4•i45=-
z2•z3•z4•z5 z1•z2'•z3'•z4
1、定轴轮系的传动比等于各对啮合齿轮传动比的连乘积;
2、其大小等于各对啮合齿轮中所有从动轮齿数的连乘积与所 有主动轮齿数的连乘积之比。即
从1→K从动轮齿数的连乘积 i1K 从1→K主动轮齿数的连乘积
齿轮系
1 轮系分类及其应用特点 2 轮系的功用 3 定轴轮系及其传动比
.
1
1 轮系分类及其应用特点
p 定义 p 分类 p 运动简图
.
2
一对圆柱齿轮,传 动比不大于5~7
主动轮 12小时
从动轮
时针:1圈
分针:12圈 i = 12 秒针:720圈 i = 60
i = 720
问题:如何实现大传动比传动? 轮系
传动比定义: 所谓轮系的传动比,指的是轮系中输入轴与 输出轴的角速度(或转速)之比。
iAB=ωA/ ωB=nA/nB
A、B表示轮中的输入和输出轴
本节要解决的问题:
1.轮系传动比 i 的计算; 2.从动轮转向的判断。
大小 方向(正负号或箭头 )
.
28
齿轮机构的传动比
定轴轮系的传动比计算
齿轮系及其设计主要知识点
齿轮系及其设计主要知识点导言:齿轮系是一种广泛应用于机械系统中的传动装置,通过齿轮之间的啮合来传递力量和运动。
本文将介绍齿轮系的基本概念、设计要点以及相关的知识点,为读者提供深入了解和应用齿轮系的指导。
一、齿轮系概述齿轮系是由两个或多个齿轮组成的传动装置,常用于变速、传递运动和转矩的应用。
它可以改变输入轴和输出轴的转速和转矩大小,且具有高效、平稳和可靠的特点。
二、齿轮系的设计要点1. 齿轮的几何参数:包括齿轮的模数、齿轮的齿数、齿轮的压力角等。
这些参数直接影响着齿轮的传动性能和工作寿命,设计时需要根据具体的传动要求进行合理选择。
2. 齿轮啮合条件:齿轮的啮合要求是齿轮几何参数的匹配,包括齿数比、齿廓曲线等。
保证齿轮啮合的紧密度和平稳性,是齿轮系设计中的重要环节。
3. 齿轮的材料选择:由于齿轮在工作中承受较大的载荷和摩擦,材料的选择直接影响着齿轮系统的耐磨性和寿命。
常见的齿轮材料有钢、铸铁、铜合金等,需要根据具体的工作条件和需求来进行选择。
4. 齿轮的润滑与冷却:为了减小齿轮系统的摩擦和磨损,以及散热问题,必须对齿轮进行润滑和冷却,常见的方式有油润滑、气体润滑、水冷却等。
5. 齿轮的传动误差和噪声控制:由于制造误差和运动不平衡等因素,齿轮系统会产生传动误差和噪声。
设计时需要考虑减小误差和噪声的方法,如精密加工、动平衡等。
三、齿轮系的常见结构类型1. 平行轴齿轮系:由两个平行轴上的齿轮组成,常用于平行轴传动和同方向或反方向传动的场合。
2. 交叉轴齿轮系:由两个相交轴上的齿轮组成,常用于传递转矩和变速的应用。
3. 斜齿轮系:由两个斜齿轮组成,可实现非平行轴传动,常用于交叉轴传动和变速箱等应用。
4. 锥齿轮系:由两个锥齿轮组成,常用于轴线交叉和转动方向变换的场合。
四、齿轮系的设计流程1. 确定传动比和传动方式:根据输入轴和输出轴的转速和转矩要求,确定传动比和传动方式,选择合适的齿轮组合方式。
2. 计算齿轮参数:根据传动比和齿轮设计要点,计算齿轮的几何参数,包括齿数、模数、压力角等。
齿轮系

,
3)联立求解
4)注意符号
n1 n H nk nH
z 2 z 3 ... z k z 1 z 2 ' ... z k 1 '
a、齿数比连乘积前的符号; b、已知转速应以代数量代入:即带“+”或“-” ; c、求出的转速也带有符号,“+”表示与假定的正方向相同, “-”表示与假定的正方向相反;
特别当 1 0 时 i3 H 当3 0 时
3 H 1
1
1
z1 z3 z3
z1
i1 H
H
例6-1:图示轮系中已知z1=100, z2=101,z2’=100, z3=99,求iH1
解:iH13=(ω 1-ω H)/(0-ω H ) = 1-i1H =z2z3/z1z2’ =101×99/100×100 ∴ i1H=1-iH13 1
n1 n2
2' 2 2'
H 4
2、分列方程
z2 z1 n2 100 99 n 2' n 2
3
4'
,
,
n1 ' n4'
z5' z 4 ' z1 ' z 5
,
n4'
101 100
,
n4 n4'
n 2' n H n4 nH
z 3z4 z 2'z 3
1
3、 联立求解
惰轮:轮系中齿轮4同时与齿轮3’和齿轮5啮合不影响轮系传动 比的大小,只起到改变转向的作用。
二、空间定轴轮系传动比的计算
一对空间齿轮传动比 的大小也等于两齿轮齿数 的反比,所以也可用上述 公式来计算空间轮系的传 动比,但其首末轮的转向 用在图上画箭头的方法, 如图所示。
齿轮系

推广后一般情况,可得:
所有从动轮齿数的连乘 积 所有主动轮齿数的连乘 积
H i AK ( 1) m
12.2 行星齿轮系传动比的计算
12.2.2 行星齿轮系的传动比计算
注意事项:
1)A、K、H三个构件的轴线应互相平行,而且
= n7 V8=V7=2 r7n7/60= m Z7n7/60
= 3.14x3x20x0.3125/60
=0.98mm/s =0.00098m/s
移动方向如图所示
周转轮系传动比的计算
具有一个自由度的周转轮 系称为简单周转轮系,如 下图所示;将具有两个自 由度的周转轮系称为差动 轮系,如下图所示。
F=3x(N-1)-2PL-PH F1=3x3-2x3-2=1 F2=3x4-2x4-2=2
构件
行星齿轮系中的 转速
转化齿轮系中的 转速
太阳轮1 行星轮2 太阳轮3 行星架H
1
3 H
2
1H 1 H H 2 2 H
3H 3 H
H H H H 0
12.2 行星齿轮系传动比的计算
12.2.2 行星齿轮系的传动比计算
转化机构中1、3两轮的传动比可以根据定轴齿轮系传动的计算方法得出
12.2.3 复合齿轮系的传动比计算
[例题] 在如图所示的齿轮系中,已知 z1 24
' z3 20
z 2 48
' z2 30
z3 90
z 4 30
z5 80 求传动比
i1H
[解]
该复合齿轮系由两个基本齿轮系构成。齿轮1、2、2’、3、系杆H 组成差动行星齿轮系;齿轮3’、4、5组成定轴齿轮系,齿轮5和系 ' 杆H做成一体,其中: H 5 3 3 对于定轴齿轮系 对于行星齿轮系
机械原理课件-齿轮系

i1m= (-1)m 2)画箭头
所有从动轮齿数的乘积 所有主动轮齿数的乘积
11
外啮合时:两箭头同时指向(或远离)啮 合点。头头相对或尾尾相对。
内啮合时:两箭头同向。
2 2
第二节 定轴轮系传动比的计算
对于空间定轴轮系,只能用画箭头的方法来确定从动轮的转向。
1)锥齿轮 2)蜗轮蜗杆
2
1
3
右
旋
蜗 杆
2
1
复合轮系(两者混合)
轮系的类型 一、轮系的分类 1.定轴轮系 轮系运转时,如果各齿轮轴线的位置都固定不动,则称之为 定轴轮系(或称为普通轮系)。
1 2
3
4
第一节 齿轮系及其分类
定轴轮系
2. 周转轮系:
至少有一个齿轮轴线的位置不固定,而是绕着其它定轴齿轮的轴线 做周向运动的轮系。
周转轮系举例:
第二节ω定1 轴轮系传ω动比2 的转计向算相反
二、首、末轮转向的确定(两种方法)
1
p
2
转向相同
1)用“+” “-”表示 适用于平面定轴轮系(轴线平行,两轮转
vp
向不是相同就是相反)。
p vp ω1
外啮合齿轮:两轮转向相反,用“-”表示;
1 2
ω2
内啮合齿轮:两轮转向相同,用“+”表示。
设轮系中有m对外啮合齿轮,则末轮转向为(-1)m
如果齿轮系中各齿轮的轴线互相平行,则称为平面齿轮 系,否则称为空间齿轮系。
根据齿轮系运转时齿轮的轴线位置相对于机架是否固定, 又可将齿轮系分为两大类:定轴齿轮系和行星齿轮系。
由齿轮组成的传动系统简称轮系
第一节 齿轮系及其分类
齿轮系
平面定轴轮系 定轴轮系(轴线固定)
齿轮系传动
1.4 轮系的功用
1.4.4 实现分路传动
利用轮系可以使一个主动轴带动若干从动轴同时旋转,将运动从不同的传动路线 传动给执行机构的特点可实现机构的分路传动。如图1.16所示的机械钟表轮系结构 中,在同一主轴1带动下,利用轮系可以实现H、M、S三个从动轴的分路输出运动 。
图1.16 实现分路传动
1.1.2 行星轮系
图1.1 定轴轮系
在轮系运转时,若至少有一个齿轮的几何轴线绕机架上的固定轴线转动, 则该轮系称为行星轮系,如图1.2所示。
1.1 轮系的分类
在行星轮系中,活套在构件H上的齿轮2称为行星齿轮。支承行星齿轮作公 转的构件则称为行星架或系杆(用H表示)。与行星齿轮相啮合且轴线固定的齿 轮1和3称为中心轮(用K表示)。其中,外齿中心轮称为太阳轮;而内齿中 心轮称为内齿圈。传动时,中心轮和行星架绕机架上的固定轴线转动。行星 轮一方面受行星架的牵连、围绕机架上的固定轴线作公转,同时又绕其自身 的轴线在自转。
分析组合齿轮系的关键是先找行星轮系,方法是先找出行星轮与行星架,再 找出与行星轮啮合的中心轮,最后剩下的就是定轴齿轮系。
1.4 轮系的功用
轮系传动准确,有其他机构无法替代的特点,特别是行星轮系,具有许多特 点:如行星齿轮既自转又公转;差动轮系具有两个自由度;合理地采用内啮合 ,可合理利用两中心轮间的空间;用多个行星轮均载装置传递载荷等。随着机 械制造业的发展和齿轮加工工艺及测量技术的不断改进及完善,轮系在工程中 的应用十分广泛。其功用可大致概括为以下几个方面。
图5.6 电动提升机传动系统
1.3 行星轮系传动比的计算
1.3.1 行星轮系传动比计算方法
行星轮系和定轴轮系之间的根本区别就在于行星轮系中有着转动的行星架, 使得行星轮既有自转又有公转。行星轮系的传动比就不能直接利用定轴轮系的 方法进行计算。但是根据相对运动原理,假如给整个行星轮系加上一个与行星 架H的转速大小相等、方向相反的附加转速“-nH”,此时各级齿轮之间及齿 轮与其他各构件间(行星架、机架)的相对运动关系不变,这样原来的行星轮系 就转化为一个假想的“定轴轮系”。这种经过一定条件转化得到的假想定轴轮 系称为原行星轮系的转化机构或转化轮系。利用这种方法求解轮系的方法称为 转化机构法。如图5.7所示,转化轮系中各构件的转速如表1.1所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
【观察与思考】
(1)设计图示的一大传动比的齿轮传动,请思考 • 该齿轮传动的传动比有什么决定?两齿轮齿数相 差如何? • 从结构和使用寿命方面分析这对齿轮传动存在什 么问题? • 有无其他办法来获得同样大小的传动比来避免上 述问题?
• (2)如图10-2所示为一钟表的传动机构。 通过仔细观察,请思考 • 时针、分针和秒针的运动是怎样获得的? • 时针、分针和秒针之间转速关系如何?是 怎样保证这种转速关系的?
1000 31 nⅢ= n4= n1 596 r/min 52 i14
中速前进
ห้องสมุดไป่ตู้
3.低速前进时,滑移齿轮6与齿轮5啮合,其啮合 关系线图为 Ⅰ ═ z1—z2 ═ z5—z6 ═ Ⅲ 故 nⅢ= n6
i16
38 36 24 n1 12 z 2 z 6 n6 z1 z 5 19 21 7
解: 该轮系啮合关系线图为 z1—z2═ z3—z4—z5 ═ z6—z7—z8 ═ z9—z10
(1)求传动比i17和i1 10 n1 z 2 z 4 z 5 z 7 25 20 14 30 2.5 i17 n7 z1 z 3 z 4 z 6 15 14 20 20
一对圆锥齿轮传动, 两轮节点处速度方向同向,箭头相背或相向;
一对蜗轮蜗杆传动,用左右手螺旋定则。
例:
圆锥齿轮传动
2.公式法 (只适合平面定轴轮系)
对于平面定轴轮系,各轮的转向不相同则相反。 传动比正负号规定:两轮转向相同(内啮合) 时传动比取正号, 两轮转向相反(外啮合)时传动比取负号,轮系中从动轮与主动轮 的转向关系,可根据其传动比的正负号确定。外啮合次数m为偶 数(奇数)时,轮系的传动比为正(负),进而可确定从动件 的转向。
1 2 12 2 1
n2 / z 3 i 2/ 3 n3 z 2/
/ /
n n z 4 z , i i4 n z4 n z
3 4 4 3
5
34
5
5
/
n n n n 2 i i2 i3 i nnnn
1
/
则
/
/ 4
3
12
3
/
4
45
2
3
4
5
n1 n5
zzzz z z2 z z
推广:设轮1为起始主动轮,轮N为输出从动轮,则定轴
轮系的传动比的一般公式为 :
n1 轮1至轮N间所有从动轮齿数的连 乘积 i nN 轮1至轮N间所有主动轮齿数的连 乘积
二、输出轮转向的确定 1.箭头法
(适合各种定轴轮系)
箭头方向:表示可见侧的速度方向
一对外啮合圆柱齿轮传动:两轮转向相反,箭头反向; 外啮合圆柱 齿轮传动 一对内啮合圆柱齿轮传动,两轮转向相同,箭头同向; 内啮合圆柱 齿轮传动
,也可根据外啮合次数确定(-1)m。
(3)将nA、nK、nH的数值代入上式时,必须带正号或负号。
H H i i AK i AK , AK是转化机构的传动比,即齿轮A、K相对于行 (4)
星架H的传动比,而i AK 是行星齿轮系中A、K两齿轮的传动比。借 助转化机构的传动比,建立起A、K两轮的转速nA、nK间的关系, n i 。 从而计算 n
轮系转化为定轴轮系。
1.转化机构的概念 假想对整个行星轮系加上一个与 行星架转速n H大小相等而方向相反 的公共转速-n H,使系杆H变为相对 固定后,所得到的假想的定轴轮系。 根据相对运动原理,转化机构中各 构件的相对运动关系并不改变。
2.转化机构中的各构件转速 为区分起见,转化机构中的转速 右上角加上H表示。
∴
平面定轴齿轮系传动比计算式为:
n1 1至轮N所有从动轮齿数的连乘 积 m 轮 i (1) nN 轮1至轮N所有主动轮齿数的连乘 积
惰轮:不影响传动比大小,只起改变从动轮转向作用的齿轮。
【例】 如图所示为一汽车变速箱,主动轴Ⅰ的转速 nⅠ=1000r/min,当两半离合器x、y接合时,Ⅰ轴直接 驱动从动轴Ⅲ,此时为高速前进;两半离合器脱开,滑 移齿轮4与齿轮3啮合时为中速前进;滑移齿轮6与齿轮 5啮合时为低速前进;滑移齿轮6与齿轮8啮合时为倒车。 已知各轮齿数为z1=19,z2=38,z3=31,z4=26,z5=21, z6=36,z7=14,z8=12。试求从动轴Ⅲ 的四种转速。
运动演示
与行星轮相啮合、轴线固定的齿轮
(图中轮1、3)。 行星轮、太阳轮、行星架以及机架组成行星轮系。 结构演示
一个基本行星轮系中,行星轮可有多个,行星架只能有一个。
行星轮系的啮合关系线:以行星轮为核心,至与之啮合的太阳轮为 止。
二、行星轮系传动比计算 由于行星轮系中行星轮的轴线不固 定,因此其传动比不能直接用定轴 轮系传动比的公式来计算。 设法使行星架H 固定不动,将周转
故 nⅢ= n6
nⅢ= n6=
1000 7 n1 194 r/min 36 i16
倒车
【例】 图所示空间定轴轮系中,已知各轮的齿数为z1=15,z2=25,z3=14,z4=20, z5=14,z6=20,z7=30,z8=40,z9=2(右旋),z10=60。试求:(1)传动比i17和i1 10; (2)若n1=200 r/min,从A向看去,齿轮1顺时针转动,求n7和n10。
H
n n i n n
H 1 14 4
H H
z 1 z zz
2 2 1
4
3
将n4=0代入上式得
所以 i H 1 n H 60 n1
20 59 1 n1 1 z2 z4 1 60 20 60 nH z1 z3
nH与n1同向。
若改变上述行星轮系中各齿轮的齿数,使z1=100,z2=101,z3=100,z4=99,则求 得传动比iH1=10000,即手轮转10000转,刻度盘才转一转,且两构件转向相同。由此 可见,行星齿轮系用少数几个齿轮就能获得很大的传动比。
在机械和仪表中,仅用一对齿轮传动往往不能满足 实际工作要求,例如要得到较大的传动比、变速、变 向及回转运动的合成或分解等。因此,通常用一系列 齿轮组合在一起来进行传动。这种由一系列齿轮组成 的传动系统称为齿轮系(简称轮系)。
一、齿轮系的类型 1.按各齿轮(或构件)的轴线是否相互平行可分为: 平面轮系
二、齿轮简图符号 齿轮简图符号 三、啮合关系线图 啮合关系线图对分析轮系很有帮助。在线图中,通常用“—”表 示两轮相啮合,用“…”将行星轮与行星架H相连,“=”表示两 零件是同一构件。
啮合关系线图为 : 1—2—3 啮合关系线图为 : 1—2=2′—3—4=4′—5
· · · H
四、齿轮系的传动比
A AK K
【例】如图所示某花键磨床的读数机构为一行星轮系,通过刻度盘转过的格数 来记录手轮的转速,即丝杆的转速。若已知各轮齿数z1=60,z2=20,z3=20及 z4=59,齿轮4固定,试求手轮(即丝杆)与刻度盘(即齿轮1)的传动比iH1。 解: 图示轮系中,因双联齿轮2-3的几何轴 线随H杆(丝杆)一起转动,故为行星轮系, 双联齿轮2=3为行星轮,与行星轮2啮合的齿 轮1为活动太阳轮,与行星轮3啮合的齿轮4为 固定太阳轮,H为行星架。其啮合关系线图为: 1—2═ 3—4
因 i110
故 n10
n1 100 n10
n1 200 2 (r/min) 100 i110
用画箭头的方法表示各轮的转向,如图所示。
第二节 行星轮系传动比的计算
一、行星轮系的组成
行星轮:轴线活动的齿轮,既自转又 公转(如图中齿轮2)。 行星架或系杆:支承行星轮的构件 (图中H)。 太阳轮(中心轮):与行星架同轴线、
解 :1. 高速前进时,两半离合器x、y接合,nⅢ= nⅠ=1000r/min。 2.中速前进时,滑移齿轮4与齿轮3啮合时,其啮 合关系线图为 Ⅰ ═ z1—z2 ═ z3—z4 ═ Ⅲ 故 nⅢ= n4,nⅠ= n1
i14 38 26 52 n1 12 z 2 z 4 n4 z1 z 3 19 31 31
3.转化机构的传动比计算 由于转化轮系为定轴轮系,故根据定 轴轮系传动比计算式可得轮1、3传动比 为:
将上式推广到一般情况,可得行星轮系转化机构的计算式:
i
H AK
n n
H A H K
n n n n
A K
H H
轮A至轮K所有从动轮齿数的连乘 积 轮A至轮K所有主动轮齿数的连乘 积
注意: (1)上式只适用于轮A、轮K和行星架H的转动轴线相互平行或重合 的情况。 (2)齿数连乘积之比前的“”号表示转化轮系中A、K轮的转向 相同或相反, “”号可按画箭头的方法来确定。对平面行星轮系
i110 n1 z 2 z 4 z5 z 7 z8 z10 25 20 14 30 40 60 100 15 14 20 20 30 2 n10 z1 z3 z 4 z 6 z 7 z 9
(2)求n7和n10 因 故
n1 2.5 n7 n1 200 80 (r/min) n7 2 . 5 i17 i17
120 n H 40 20 () 120 n H 60 20
解得 nH=600 r/min nH为正,表示与n1转向相同。
第三节
混合轮系
混合轮系:由定轴轮系和行星轮系组合或几个单一的行星轮系组 成的轮系。 混合轮系传动比计算的一般步骤: 1. 正确划分轮系中的行星轮系和定轴轮系部分。 关键是先要把其中的行星轮系部分划分出来。 行星轮系的找法: (1)先找出几何轴线位置变化的行星轮,然后找出 行星架,以及与行星轮相啮合的所有中心轮。 (2)每一行星架,连同行星架上的行星轮和与行星轮相 啮合的中心轮就组成一个基本行星轮系。 在将行星轮系一一找出之后,剩下的便是定轴轮系部分。 2. 分别计算各轮系的传动比。 3. 将各传动比关系式联立求解。