姿态传感器模块原理图
一种使用Qt的姿态传感器显控设计与实现

一种使用Qt的姿态传感器显控设计与实现作者:王潇卢如意李博来源:《声学与电子工程》2019年第02期摘要 为缩短软件开发周期,提出了一种在Windows 平台下基于Qt 图形用户界面设计框架的姿态传感器显控软件设计思路,通过Qt 串口控件实现显控终端与姿态传感器的指令传送及信息交互,通过Qt绘图控件实现姿态数据及图线的实时显示,并实现姿态数据的实时存储。
该方法具有信息实时显示和程序架构简单的优点,以较小的代码量实现软件全部功能需求。
关键词 Qt;串口通信;姿态传感器;显控;实时姿态传感器显控软件是连接计算机终端与传感器的桥梁,其将控制指令发送给传感器并使计算机终端接收到测量数据,使整个测量系统构成回路。
以传统的MFC( Microsoft Foundation Classes)方法开发复杂的图形界面,需要程序员编写大量的代码,对控件的实现需要调用底层的作图函数进行绘制,开发时间长。
而Qt具有跨平台性能[1],可以一次编写多处编译,具有良好的封装机制、友好的信号一槽连接事件驱动机制,并提供Qt Designer图形界面开发工具[2],可进行拖拽式的界面控件排布,便于程序开发。
本文介绍了一种使用Qt的姿态传感器显控软件设计方法,以较小的代码量以及较短的开发周期实现了计算机终端与姿态传感器的控制指令及测量信息的交互,以及测量数据实时显示保存的功能需求。
1 姿态传感器概述本文所使用的姿态传感器通过RS485串口与外部设备通信,可同时上传偏航角、俯仰角、横滚角以及温度数据,将其封装在一个15 Byte数据包中。
测量数据通信协议如表1所示。
若干个姿态传感器由下位单片机串联在RS485通信总线上,共用一个串口与显控终端通信,通过姿态传感器的通信地址寻址通信,即可同时测量一个阵列中各节点处的姿态数据,上传的测量数据即为若干个15 Byte数据包的拼接,非传感器通信地址的命令帧将不予响应。
显控软件在打开串口建立串口通信后即发送开始测量指令,串联在一起的若干个传感器即可按照给定的频率上传测量结果数据。
东方微电 DF-AS-100系列姿态传感器 产品说明书

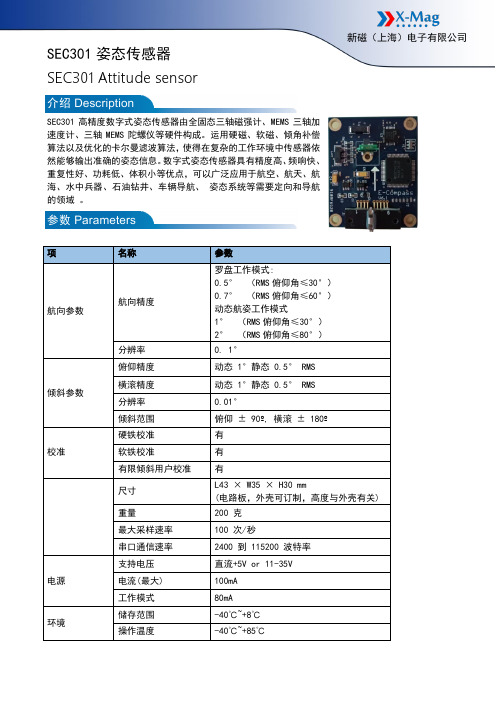
产品说明书Product description 东方微电科技(武汉)有限公司2020.11.24DF-AS-100系列姿态传感器由MEMS 三轴陀螺仪,三轴加速度计,三轴磁传感器等硬件构成。
通过卡尔曼滤波算法和硬磁,软磁倾角补偿算法及多传感器融合算法,可实现俯仰角,横滚角,偏航角等功能计算。
确保系统在严苛的环境下依然能优异得进行姿态测量等功能。
DF-AS-100系列姿态传感器具有精度高、频响快、重复性好、功耗低、体积小等优点,可以广泛应用于航空、航天、航海、水中兵器、石油钻井、车辆导航、姿态系统等需要自主测量三维姿态的产品设备。
DF-AS-100系列采用高性能的微处理器和先进的动力学解算与卡尔曼动态滤波算法,能够快速测量精度。
模块内部集成了姿态解算器,配合动态卡尔曼滤波算法,能够在动态环境下准确输出模块的当前姿态,稳定性极高。
模块内部自带电压稳定电路。
姿态测量稳定度:0.3°(RMS )横滚,俯仰角分辨率:0.01°横滚,俯仰角精度:0.2°(RMS )俯仰角测量范围:±85°,横滚角测量范围0°~360°磁参考航向角精度:0.3°(RMS )带硬磁、软磁及倾角补偿量程:加速度:±16g ,角速度:±2000°/s 。
输出DF-AS-100DF-AS-101DF-AS-103DF-EC-100DF-EC-101角速度,加速度√磁场强度横滚角,俯仰角√无参考航向角√磁参数航向角位置,速度√姿态性能姿态航向参数航向精度≤0.3°(RMS )分辨率0.01°重复性0.1°姿态倾斜参数俯仰精度0.2°俯仰倾斜范围±85°横滚精度0.2°东方微电科技(武汉)有限公司主要特性性能指标◒校准前提(1)测试姿态传感器精度达不到要求;(2)姿态传感器安装环境有磁场干扰。
SEC-301 姿态传感器产品手册2
保持静止采集一次,此时加速度计的 X、Z 轴动态范围最大;
(4)使传感器的 YOZ 与重力加速度方向在同一平面内,让传感器沿着 X 轴缓慢旋转一周,每 30°
保持静止采集一次,此时加速度计的 Y、Z 轴动态范围最大;
(5)按照下表姿态角采点
俯仰角
横滚角
航向角
±30°
±30°
45°, 135°,225°,315°
此界面显示模块当前的运行状态和三个姿态角数据,有房的 3D 模型实时反映模块的当前姿态。 5. 数据记录 记录各个传感器的数据,允许以 TXT 格式保存成文件。 6. 运行曲线
这个界面可将模块姿态角或者内部各个传感器的实时数据以曲线的形式显示出来,可以更加直观的 观察模块姿态变化趋势。 7. 固件升级 通过给模块上传程序包对内部程序或者内部参数进行更新,保证模块的稳定性,延长了模块的寿命。
接口
抗振性能 通信接口
物理特性 RS232/RS485/TTL
安装方式 裸板安装:将电路板的通过四格定位孔水平固定在载体上。 外壳安装:将电路板装入订制无磁外壳以后将外壳固定在载体上。如下图所示:
图 1 姿态模块安装示意图
保证外壳固定,尽量使外壳与载体平面平行,减小失准角。尽管传感器内含有磁干扰补偿,但安装
包字节数包括帧内容加上 CRC 校验所包含的字节数,CRC16 校验包含包字节数加上帧内容校验后的
结果,校验结果为 16 位,高字节在前。
例如 kGetModInfo 命令包如下:
00 05
01
EF D4
包字节数
帧内容
校验
2 参数格式
浮点数编码方式遵循 IEEE Std 754-1985 标准,整数遵循计算机补码编码方式。所有参数在编码后
卫星姿态控制系统设计报告
卫星姿态控制系统设计报告一、概述卫星姿态控制是指通过控制卫星的姿态,使其在轨道上保持稳定和精确的方向和位置。
本文将设计一种卫星姿态控制系统,该系统旨在实现对卫星姿态的精确控制,提高卫星任务的执行效率和准确性。
二、系统架构卫星姿态控制系统主要由以下几个部分组成:1. 姿态传感器:用于感知卫星当前的姿态状态,如陀螺仪、加速度计等。
2. 姿态控制器:根据姿态传感器的反馈信号,计算并控制卫星的姿态调整,保持期望的姿态目标。
3. 执行器:负责执行姿态控制器计算得到的控制指令,如推力器、反动轮等。
4. 数据处理与通信模块:处理传感器和执行器的数据,并与地面控制中心进行通信,接收姿态目标和发送卫星状态信息。
三、系统设计1. 姿态传感器选择根据卫星姿态控制的要求,选择适合的姿态传感器进行姿态状态的感知。
常用的姿态传感器有陀螺仪、加速度计、磁强计等。
根据卫星需要实现的精度和稳定性要求,综合考虑成本和性能因素,确定最佳的姿态传感器组合。
2. 姿态控制器设计姿态控制器是卫星姿态控制系统的核心部分,根据姿态传感器提供的姿态状态信息,计算出控制指令以调整卫星的姿态。
姿态控制器的设计主要包括以下几个关键步骤:- 卫星姿态描述和数学模型的建立;- 设计姿态控制算法,如PID控制器、模糊控制器等;- 姿态控制算法的参数调整和优化。
3. 执行器选择根据卫星姿态控制系统的需求和任务特点,选择合适的执行器。
根据不同的执行任务,常用的执行器有推力器、反动轮、电动机等。
根据执行器的特性和系统需求,确定最佳的执行器组合。
4. 数据处理与通信模块卫星姿态控制系统需要实时处理传感器数据,并与地面控制中心进行通信,传输姿态目标和卫星状态信息。
数据处理与通信模块需要具备以下功能:- 传感器数据采集和预处理;- 数据处理算法的实现,如滤波、解算等;- 与地面控制中心进行数据交互和通信。
四、系统测试与优化完成卫星姿态控制系统的设计后,需要进行系统测试和性能优化。
MRU,姿态传感器,运动参考单元 应用案例介绍

MRU 运动参考单元技术介绍及应用案例深圳立创工控吕云飞MRU 运动参考单元(姿态传感器)用于在水上或者水下的俯仰、滚转、前进、后退、升降等运动而设计(六个自由度),在静态、动态不同工况下都可以满足其精确测量。
MRU的应用环境集中在船舶、水下机器人(ROV/AUV)、水下施工辅助、水上运维机械等领域上,在陆地上的悬空作业中也有应用。
技术参数:产品特点:数据传输稳定、精度高、可靠性高在静态与动态条件下对姿态数据进行补偿,提高数据的可靠性 数据输出格式格式(规则)可自定便捷式的安装方式,对安装环境要求低姿态数据(六个自由度)示例:应用案例:MRU运动参考单元——船舶姿态监测船舶的航行环境大致分为江湖河与海洋,江湖河的航行环境要优于海洋,但这并不代表江湖河的航行环境全面优越,航道的浅、窄就是江湖河不可避免的非理想航行环境。
以下将介绍MRU在船舶于两大航行环境中的应用。
海洋航行环境:飓风、巨浪、暗礁、潮汐、海流、远距等MRU的安装示意:技术解决说明:在船舶行业过程中,首要必须确认其航行姿态是在预设航线、航向上前行,如出现偏离则需要实时调整,而此时的调整姿态依据至关重要。
MRU-LT-TSR-100能够精确的捕捉到姿态实时数据,对姿态实时数据还能够作出数据补偿,以提高数据的精准性。
船舶通用性MRU数据示例:MRU运动参考单元——水下机器人(ROV/AUV)水下机器人在水下作业中的应用越来越广泛,于铺设管线、海底考察、数据收集、钻井支援、海底施工,水下设备维护与维修、救援等领域中得到大量的应用。
水下机器人在潜行过程中对于姿态的监测需实时监控,水下航行环境相比水上航向环境更恶劣,所需监控参数也更复杂,其中翻滚参数就是水下航行特有参数之一。
水下机器人示例:水下线缆铺设机器人MRU数据示例:MRU运动参考单元——在安装吊机上的使用吊机安装设备在安装过程中,设备的衔接点受到外部环境的影响,难以迅速的找出衔接的基准点,安装缓慢、基准点的错误对于精密仪器更是致命。
六轴姿态传感器原理

六轴姿态传感器原理今天咱们来唠唠六轴姿态传感器这个超酷的东西。
你想啊,在咱们这个充满科技魔法的世界里,很多设备好像都有了自己的感知能力。
六轴姿态传感器就像是一个小小的智能精灵,能精准地知道某个物体的姿态,这可太厉害了。
那这个六轴姿态传感器到底是咋工作的呢?其实啊,这里面主要涉及到加速度计和陀螺仪这两个超级明星部件。
先说说加速度计吧。
加速度计就像是一个超级敏感的小卫士,它能感受到物体的加速度。
啥是加速度呢?简单说就是速度的变化啦。
比如说,你坐过山车的时候,那种突然加速或者减速的感觉,加速度计就能捕捉到。
它是通过检测物体受到的力来确定加速度的。
在六轴姿态传感器里,加速度计可以检测到物体在三个轴向(通常是x、y、z轴)上的加速度。
这就好比它能知道这个物体是在向前冲得更快了,还是突然刹车减速了,或者是在往侧面移动了呢。
这就像是给物体的线性运动安了个小眼睛,时刻盯着它的一举一动。
再来说说陀螺仪。
陀螺仪可就更有趣啦。
它就像一个旋转小达人,专门负责检测物体的角速度。
啥叫角速度呢?就是物体旋转的速度有多快呀。
你可以想象一下,一个陀螺在那里飞快地旋转,陀螺仪就能知道它转得有多快,是顺时针转还是逆时针转。
在六轴姿态传感器里,陀螺仪也是检测三个轴向的角速度呢。
比如说,你拿着手机转圈圈,陀螺仪就能精确地知道手机是怎么转的,转了多少度。
这就好像给物体的旋转运动也找了个超级管家,把旋转的情况管理得井井有条。
这加速度计和陀螺仪就像一对好搭档。
加速度计管着直线运动的情况,陀螺仪管着旋转运动的情况。
它们两个把收集到的信息汇总到一起,就像两个小伙伴把自己看到的情况告诉六轴姿态传感器这个大老板。
然后呢,这个六轴姿态传感器就能根据这些信息算出物体的姿态啦。
这个姿态就包括物体的倾斜角度、翻滚角度之类的。
比如说,你把手机倾斜着拿,传感器就能知道手机倾斜了多少度,是向左斜还是向右斜,是向前倾还是向后仰。
这种能力在很多地方都超级有用呢。
就像在无人机里,六轴姿态传感器能让无人机知道自己的姿态,这样它就能平稳地飞行啦。
姿态传感器数据处理流程
姿态传感器数据处理流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!姿态传感器数据处理流程一般包括以下步骤:1. 数据采集:使用姿态传感器采集物体的姿态数据,例如加速度计、陀螺仪、磁力计等。
jy61p 定向原理
jy61p 定向原理
JY61P是一种六轴姿态传感器模块,它可以测量物体的姿态参数,包括加速度、陀螺仪和磁力计数据。
在定向原理方面,
JY61P模块通过结合这些传感器的数据,实现了定向功能。
加速度传感器测量物体的线性加速度,通过对加速度积分可以计算出速度和位置信息。
陀螺仪测量物体的角速度,通过对角速度的积分可以计算出姿态角(倾斜角度和旋转角度)。
磁力计用于测量地球的磁场,可以帮助确定物体相对于地球的方向。
这些传感器的数据被输入到算法中,通过计算和滤波,可以得出准确的姿态数据。
JY61P模块采用了传感器融合算法,将加速度计、陀螺仪和磁
力计的数据进行融合,以提高姿态数据的精度和稳定性。
这种融合算法可以根据不同的应用场景进行调整,例如使用加速度计和陀螺仪进行姿态计算时,可以减少磁力计的影响。
通过JY61P模块,可以实现精确的姿态控制和导航功能。
它
被广泛应用于无人机、机器人、航天器和虚拟现实等领域。
机器人传感器教学课件
人机交互传感器
如语音识别、手势识别等,实 现人与机器人的自然交流。
环境感知传感器
如温度、湿度、光线等传感器 ,用于感知环境变化并作出相 应调整。
导航定位传感器
如激光雷达、GPS等,实现机 器人的自主导航和定位。
农业机器人传感器的应用案例
总结词
农业机器人传感器在现代化农业生产 中发挥着重要作用,提高农作物的产 量和质量。
THANKS
感谢观看
泛应用。
姿态传感器
总结词
用于检测机器人的姿态和方向变化,保 持稳定性和平衡。
VS
详细描述
姿态传感器通常采用陀螺仪或加速度计等 惯性传感器,能够检测机器人的姿态和方 向变化,并通过反馈控制算法调整机器人 的运动状态,保持稳定性和平衡。姿态传 感器在机器人移动、操作和定位等领域具 有广泛应用。
力矩传感器
触觉传感器工作原理及应用场景
触觉传感器工作原理
触觉传感器是用于检测机器人与外部物体的 接触和压力的传感器。其工作原理通常是通 过测量电阻、电容或压电效应等方式,将接 触和压力转换为电信号,进而传输给机器人 控制器进行处理。
触觉传感器的应用场景
触觉传感器广泛应用于机器人抓取、操作和 识别物体等任务。例如,在装配线上,机器 人使用触觉传感器检测零件是否正确安装; 在医疗领域,触觉传感器帮助机器人进行微
用于检测机器人的位置和运动 状态,确保精确的定位和轨迹
跟踪。
力和扭矩传感器
用于检测机器人在执行任务时 受到的力和扭矩,实现精确的
力控制。
视觉传感器
通过图像处理和识别技术,实 现工件检测、识别和分类等功
能。
服务机器人传感器的应用案例
总结词
服务机器人传感器主要用于人 机交互、环境感知和导航定位 等方面,提高服务质量和效率
android姿态传感器在手机游戏开发中的应用
Android姿态传感器在手机游戏开发中的应用吴丽(无锡科技职业学院,江苏,无锡,214028)摘要:本文阐述了如何采用Android姿态传感器技术对传统的小球闯关游戏进行二次开发,二次开发后的游戏的玩法从原来的手机按键或者触摸操作方式改为更加自由的甩、摇、转等空间操作方式,这种创新的游戏操作方式可以给游戏玩家带来更好的体验。
关键字:Android、姿态传感器、手机游戏1 引言过去,尽管Android SDK开发环境能在移动开发人员和手机设备之间建立沟通桥梁,但是要访问手机底层硬件还是让移动开发人员感到非常棘手。
随着Android开发团队对Android SDK的不断升级更新,手机设备的许多硬件功能不断浮出水面,开发人员越来越欣喜的发现可以在手机设备内部访问一些“好工具”,比如:手机中的“传感器”。
Android 平台下的传感器包括加速度传感器(Accelerometer)、姿态传感器(Orientation)、磁场传感器(Magnetic、Field)和光传感器(Light)等[2],利用传感器可以开发出很多新奇有趣的小游戏。
随着手机游戏玩家对于手机游戏的创新体验有越来越高的要求,传统的游戏操作方式已经很难吸引玩家。
因此可以利用Android平台下的各种传感器来创新开发一些新颖有趣的游戏,其中姿态传感器在开发手机游戏中是应用最为广泛的一种。
2 Android姿态传感器原理简介Android姿态传感器主要感应手机方位的变化,捕获的是三个方位的参数,分别代表手机沿Yaw轴、Pitch轴和Roll轴转过的角度,如图1所示。
Yaw轴、Pitch轴和Roll轴与平时理解的标准空间坐标系是有所区别的。
图1 Android姿态传感器原理Yaw轴是三个轴中最简单的一个,其表示的方向是不变的,其方向一直是与重力加速度g的方向相反,即一直是竖直向上的,与手机的姿态无关。
Pitch轴的方向永远与Yaw轴成90度角,因此其方向会随着手机沿Yaw轴旋转而改变,图1 表示了该轴的方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
jcoOJKL jcoOJKM
jclKJL jcf_^KJK
jcf_^KJL
VBAT 1 jc^KJK C V3.3
]i^K D1
3 11 jc^KJM jcoOJKK VBAT XTAL32 jcoOJS 9 XTAL32 2 jc^KJL EXTAL32 10 jcoOJKJ EXTAL32 BAT54C-V
PTB0 PTB1 PTC1 PTC2 PTC3 PTC4 PTC5 PTC6 PTC7 PTD4 PTD5 hfjn^P PTD6 PTD7
]ijL P2 hfjn\J PTB0 1 jcjLJK hfjn\K PTB1 2 jcjLJL hfjn]K PTC1 3 jcjLJM hfjn]L PTC2 4 jcjLJN hfjn]M PTC3 5 jcjLJO hfjn]N PTC4 6 jcjLJP hfjn]O PTC5 7 jcjLJQ PTC6 hfjn]P 8 jcjLJR PTC7 hfjn]Q 9 jcjLJS PTD4 hfjn^N 10 jcjLJKJ hfjn^O PTD5 11 jcjLJKK
]ioN U4
HMC5883 12 SETC jcoNJKL 11 GND jcoNJKK 10 jcoNJKJ C1 9 GND jcoNJS
jc]KLJLC12 ]i]KL jc]KL4.7uF JK
jcoNJO jcoNJP jcoNJQ jcoNJR
2
Y1 16MHZ
jc]KKJK
jc]KKJL
SDA DRDY VREN DVDD
jcf_^LJK jcf_^LJ
jcoMJLN jcoMJLM jcoMJL jcoMJLK jcoMJL jcoMJKS
]ioM U3
MPU6050
DRDY A_SDA A_SCL
jc]SJK
jc]SJL
A
2
]if_^L LED2
jcoNJKP jcoNJKO jcoNJKN jcoNJKM
A_SDA A_SCL
jcoMJQ jcoMJR jcoMJS jcoMJK jcoMJK jcoMJKL
jc]QJL jc]QJK
jclLJL
]i]KK C11 0.22uF
姿态传感器模块 超核电子 h t t p : / / u p c m c u . t a o b a o . c o m /
AUX_CL VLOGIO AD0 REGOUT FSYNC INT
]ioL U2
BMP180
jcoLJK
EXTAL
V3.3
XTAL
V3.3 B
7 8 9 10 11 12
jc]NJK jc]NJL
1 2 CSB* jcoLJL VDD 6 SDA 3 SDA jcoLJP jcoLJM VDDIO 5 SCL ]i]N C4 7 SCL jcoLJO jcoLJQ 4 GND jcoLJ6
1K
jcsKJ ]isK jcsKJL
5 6 7 8
jc]RJL jc]RJK
V3.3
5 6 7 SETP
1 jcoMJK 2 jcoMJL 3 jcoMJM 4 jcoMJN 5 jcoMJO 6 jcoMJP
1
CLKIN 2 3 4 5 AUX_DA
GND 17 16 15 14 VDD
Header 11
]ijM P3 hfchn INT 1 jcjMJK hf[Jm]f A_SCL 2 jcjMJL hf[Jm^[ A_SDA 3 jcjMJM hf^l^s DRDY 4 jcjMJN PTE19 5 jcjMJO PTE18 6 jcjMJP hfjn^Q PTD7 7 jcjMJQ XTAL32 hfrn[fML 8 jcjMJR EXTAL32 hf_rn[fML 9 jcjMJS VBAT hfp\[n 10 jcjMJKJ hfjn[K PTA1 11 jcjMJKK
MK10DN32VFM5
1/1
\ V2\ Sheet of V2.SchDoc Drawn By: 4
V1.0 超核电子科技
2014/1/14 H:\
1
2
3
jc]KMJL] i]KM jc]KNJL] i]KN C13 C14 jc]KMJK 0.1uF jc]KNJK0.1uF
1
8 2 jcoOJL
jcoOJR
VDD VDDA VSSA VSS
PTA0/JTAG_TCLK/SWD_CLK/EZP_CLK/TSI0_CH1/UART0_CTS/UART0_COL/FTM0_CH5 PTA1/JTAG_TDI/EZP_DI/TSI0_CH2/UART0_RX/FTM0_CH6
Header 11 C
INT
jclNJL jclNJK
hfjn_KQ PTE17
PTE18 hfjn_KR
hfjn_KS PTE19
DRDY SDA SCL
R4 ]ilN 4.7K
jclOJL jclOJK
V3.3
]ilO R5 4.7K
Title
姿态传感器原理图
Number
D Revision
Size A4 Date: File:
]ioO U5
V3.3
jcoOJK 7 jcoOJQ
jc]PJK jc]PJL
jclLJK
]i]P C6 0.1uF
]i]Q C7
0.1uF
]ilL R2
1K
B
传感器电路
]ijK P1 ]if_^K LED1
12 13 SWD_CLK ]ilK R1 PTA1 jclKJK 1K SWD_DIO 1 2 3 4 5 6
V3.3
jclQJL]ilQ
RESET
R7 10K
jcoOJKS
jclQJK
19
RESET
D
jc]KOJK jc]KOJL
]i]KO C15
0.1uF
jcoOJMM
33
EX_PAD
14 PTA2/JTAG_TDO/TRACE_SWO/EZP_DOTSI0_CH3/UART0_TX/FTMO_CH7 jcoOJKN 15 PTA3/JTAG_TMS/SWD_DIO/TSI0_CH4/UART0_RTS/FTM0_CH0 jcoOJKO 16 PTA4/LLWU_P3/NMI/EZP_CS/TSI0_CH5/FTM0_CH1 jcoOJKP 17 PTA18/EXTAL0/FTM0_FLT2/FTM_CLKIN0 jcoOJKQ 18 PTA19/XTAL0/FTM1_FLT0/FTM_CLKIN1/LPTMR0_ALT1 jcoOJKR 20 PTB0/LLWU_P5/ADC0_SE8/TSI0_CH0/I2C0_SCL/FTM1_CH0/FTM1QD_PHA jcoOJLJ 21 PTB1/ADC0_SE9/TSI0_CH6/I2C0_SDA/FTM1_CH1/FTM1_QD_PHB jcoOJLK 22 jcoOJLL PTC1/LLWU_P6/ADC0_SE15/TSI0_CH14/SPI0_PCS3/UART1_RTS/FTM0_CH0/I2S0_TXD0 23 PTC2/ADC0_SE4B/CMP1_IN0/TSI0_CH15/SPI0_PCS2/UART1_CTS/FTM0_CH1/I2S0_TX_FS jcoOJLM 24 PTC3/LLWU_P7/CMP1_IN1/SPI0_PCS1/UART1_RX/FTM0_CH2/I2S0_TX_BCLK jcoOJLN 25 jcoOJLO PTC4/LLWU_P8/SPI0_PCS0/UART1_TX/FTM0_CH3/CMP1_OUT 26 PTC5/LLWU_P9/SPI0_SCK/LPTMR0_ALT2/I2S0_RXD0/CMP0_OUT jcoOJLP 27 jcoOJLQ PTC6/LLWU_P10/CMP0_IN0/SPI0_SOUT/PDB0_EXTRG/I2S0_RX_BCLK/I2S0_MCLK 28 PTC7/CMP0_IN1/SPI0_SIN/I2S0_RX_FS jcoOJLR 29 PTD4/LLWU_P14/SPI0_PCS1/UART0_RTS/FTM0_CH4/EWM_IN jcoOJLS 30 PTD5/ADC0_SE6B/SPI0_PCS2/UART0_CTS/UART0_COL/FTM0_CH5/EWM_OUT jcoOJMJ 31 PTD6/LLWU_P15/ADC0_SE7B/SPI0_PCS3/UART0_RX/FTM0_CH6/FTM0_FLT0 jcoOJMK 32 PTD7/CMT_IRO/UART0_TX/FTM0_CH7/FTM0_FLT1 jcoOJML 3 PTE16/ADC0_SE4A/SPI0_PCS0/UART2_TX/FTM_CLKIN0/FTM0_FLT3 jcoOJM 4 PTE17/ADC0_SE5A/SPI0_SCK/UART2_RX/FTM_CLKIN1/LPTMR0_ALT3 jcoOJN 5 PTE18/ADC0_SE6A/SPI0_SOUT/UART2_CTS/I2C0_SDA jcoOJO 6 PTE19/ADC0_SE7A/SPI0_SIN/UART2_RTS/I2C0_SCL jcoOJP
jcoMJKR 17 jcoMJKQ
18 V3.3
jcoNJK 2 jcoNJL 3 jcoNJM
1 4
16 jcoMJKP 15 jcoMJKO
jcoMJKN 13 jcoMJKM
14
]i]R C8
0.1uF INT
]i]KJ C10
0.1uF
jc]KJ K jc]KJ L
jcoNJN
SCL AVDD 3 4
V3.3
R3 1K
hfm]f SCL hfm^[ SDA
jc]OJL jc]OJK