ug6.0高级仿真破解步骤
基于UG的运动仿真及高级仿真
《基于UG的运动仿真及高级仿真》项目一:机构运动仿真项目要求:熟悉UG机构运动仿真模块的内容,掌握运动仿真的一般流程和方法,并根据分析输出结果对机构进行优化。
任务一:熟悉掌握运动仿真基础知识运动分析模块(Scenario for motion)是UG/CAE模块中的主要部分,用于建立运动机构模型,分析其运动规律。
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion 的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion模块可以进行机构的干涉分析,跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等。
运动分析模块的分析结果可以指导修改零件的结构设计(加长或缩短构件的力臂长度、修改凸轮型线,调整齿轮比等)或调整零件的材料(减轻或加重或增加硬度等)。
设计的更改可以反映在装配主模型的复制品分析方案中,再重新分析,一旦确定优化的设计方案,设计更改就可反映在装配主模型中。
一、运动方案创建步骤1.创建连杆(Links);2.创建两个连杆间的运动副(Joints)3.定义运动驱动(Motion Driver)◆无运动驱动(none):构件只受重力作用◆运动函数:用数学函数定义运动方式◆恒定驱动:恒定的速度和加速度◆简谐运动驱动:振幅、频率和相位角◆关节运动驱动:步长和步数二、创建连杆创建连杆对话框将显示连杆默认的名字,格式为L001、L002 (00)质量属性选项:质量特性可以用来计算结构中的反作用力。
当结构中的连杆没有质量特性时,不能进行动力学分析和反作用力的静力学分析。
根据连杆中的实体,可以按默认设置自动计算质量特性,在大多数情况下,这些默认计算值可以生成精确的运动分析结果。
但在某些特殊情况下,用户必须人工输入这些质量特性。
固定连杆:人工输入质量属性,需要指定质量、惯性矩、初始移动速度和初始转动速度。
UG6.0运动仿真

连杆 1 曲线(切割路线)
运动副实例,切割机机构仿真。 定义连杆:支架为固定连杆,另外三个部件均为连杆(连杆 1,连杆 2,连杆 3)。 定义运动副:1 定义连杆 2 为滑动副,在支架的导轨上滑动。并定义驱动为恒定,初
速度为 50。 2 定义连杆 3 为滑动副,并咬合连杆 2,使其能够在连杆 2 的支架上上下
z (设计位置):单击次按钮可以使运动模型回到运动仿真前置处理之前的初始三
维实体设计状态。
z
(装配位置):单击次按钮可以使运动模型回到运动仿真前置处理后的 ADAMS
运动分析模型状态。
20
UG 产品设计师讲课大纲
4.5 机构仿真动画的导出
在运动导航器中右击仿真文件,在快捷菜单中选择导出,然后选择一种动画形式即可 将仿真动画导出。 注意:在 UG 里面,导出动画需要比较长的时间,效果也不是很好。
z
:用于设置连杆最初的转动速度。
z
:用于设置连杆最初的移动速度。
z
:用于设置连杆的基本属性。
;
:选中该复选框后,连杆将固定在当前位置不动。
;
:通过该文本框可以为连杆指定一个名称。
固定连杆
在运动仿真中,主要的运动部件我们必须把他设为连杆,对于非主要运动部件和在机
构中起支撑作用的部件,我们可以把他设置成为是基于时间的一种运动形式。机构在指定的时间中运动,并指定该时间段中的步
数进行运动分析。
Step1. 打开文件。
Step2. 选择
命令进入运动仿真模块。在“运动导航器”窗口
中的
选项上单击右键,在系统弹出的快捷菜单中选择
命令。单击命令
栏中的“动画” 命令,系统弹出“动画”对话框。
4.螺钉副
基于UG的运动仿真及高级仿真

《基于UG的运动仿真及高级仿真》项目一:机构运动仿真项目要求:熟悉UG机构运动仿真模块的内容,掌握运动仿真的一般流程和方法,并根据分析输出结果对机构进行优化。
任务一:熟悉掌握运动仿真基础知识运动分析模块(Scenario for motion)是UG/CAE模块中的主要部分,用于建立运动机构模型,分析其运动规律。
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion模块可以进行机构的干涉分析,跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等。
运动分析模块的分析结果可以指导修改零件的结构设计(加长或缩短构件的力臂长度、修改凸轮型线,调整齿轮比等)或调整零件的材料(减轻或加重或增加硬度等)。
设计的更改可以反映在装配主模型的复制品分析方案中,再重新分析,一旦确定优化的设计方案,设计更改就可反映在装配主模型中。
一、运动方案创建步骤1.创建连杆(Links);2.创建两个连杆间的运动副(Joints)3.定义运动驱动(Motion Driver)◆无运动驱动(none):构件只受重力作用◆运动函数:用数学函数定义运动方式◆恒定驱动:恒定的速度和加速度◆简谐运动驱动:振幅、频率和相位角◆关节运动驱动:步长和步数二、创建连杆创建连杆对话框将显示连杆默认的名字,格式为L001、L002 (00)质量属性选项:质量特性可以用来计算结构中的反作用力。
当结构中的连杆没有质量特性时,不能进行动力学分析和反作用力的静力学分析。
根据连杆中的实体,可以按默认设置自动计算质量特性,在大多数情况下,这些默认计算值可以生成精确的运动分析结果。
但在某些特殊情况下,用户必须人工输入这些质量特性。
固定连杆:人工输入质量属性,需要指定质量、惯性矩、初始移动速度和初始转动速度。
UG6.0安装指导
UG6.0安装指导第一步:配置许可证更换计算机名字。
找到安装源文件中的MAGNiTUDE / nx6.lic(许可证)用记事本方式打开,将记事本中的this_host 更换成你计算机的名字。
计算机名字:我的电脑——属性——计算机名——完整的计算机名称。
掩盖记事本中的this_host 并保存。
第二步:开始安装Launch.exe第三步:UG6.0的安装方法有所简化,在这里我们直接安装第二步Lnstall License Server选择安装程序的语言为中文(简体)目的地文件夹(将文件安装的那个盘如安装到D盘,单击更改,只需将下面文件夹名称中“:”前面的C改成D就可以了)在下一步在使用许可证文件浏览找到第一步被掩盖过的文件(nxl.lic)打开即可,下面就是安装完成这一步了。
第四步:安装第三lnstall NX 安装类型:典型目的地文件夹更改到你要安装的位置如D盘就将C改成D,下面服务器名默认无需更改,下面的NX语言选择这里我们选择“简体中文”确认后你需要耐心的等上几分钟确定完成,到这里我们的安装也告一段落,接下来就是破解了。
第五步:破解,就是将源文件的MAGNiTUDE\UGS\NX 6.0中的四个文件夹全部复制咱贴到安装文件夹UGS\NX 6.0内。
破解完成。
现在就可以打开,会弹出阻止对话框,单击解除阻止。
1.双击打开Launch.exe2.选择第2项“Install License Server安装3.在这里可以选择安装介面的语言。
默认为中文简体。
4. 在安装过程中会提示你寻找license文件,点击NEXT会出错,这时使用浏览(Browse)来找到你硬盘MAGNiTUDE文件夹下的nx6.lic文件就可以了。
继续安装直到结束,目录路径不要改变,机器默认就行,(建议默认,也可放在其它的盘里)。
5. 选择第2项“Install NX进行主程序安装。
6. 直接点击下一步。
并选择典型方式安装,下一步,会出现语言选择画面,请选择Simplified Chinese(简体中文版),默认为英文版。
部分设计软件安装破解方法
部分设计软件安装破解方法UGNX6.0.0.24正式版安装说明建议不要把安装路径放在系统盘,请按默认的安装!安装需要大约3.56G左右的空间! 安装程序自带多种语言,包括简体中文!1.先拷贝光盘上"Crack"目录下的nx6.lic文件到你的硬盘上(可以这样来操作,在硬盘的D盘新建一个名为License的目录,并把nx6.lic放在里面),在nx6.lic文件上面点"右键--属性(参考图一)",去掉只读属性(参考图二),然后用记事本打开nx6.lic(在nx6.lic文件上面点鼠标“右键”再点打开或者打开方式参考图三,然后选择记事本程序,参考图四),将第一行的"<this_host>"(参考图五)替换为你当前计算机的名字,然后存盘退出!注意前后间隔不变。
计算机的名字查看方法:XP下:"我的电脑---右键---计算机名---完整的计算机名称" ! 参考图六。
2000下:"我的电脑---右键---网络标识---完整的计算机名称"就可以看到了!2.运行Launch.exe。
3.选择"Install License Server"(参考图七)开始安装,当安装程序要"license file"(使用许可文件)的时候(参考图八),请选择第一步中刚修改的nx6.lic文件(参考图九),请选择简体中文,直至安装结束!4.接着再运行Launch.exe,选择安装“Install NX”,选择下一步,到语言选择的时侯选简体中文,直至安装完成!5.最后破解时复制"Crack"目录下的UGS文件到安装目录下替换就OK了(有出现覆盖文件的提示)!!! 默认的安装路径为C:\Program Files。
接着就可以运行程序了,如果出现打不开或者打开后界面是英文版,说明操作有问题或者许可证文件没有弄好,包括破解文件的复制,必须从头开始。
UG-NX有限元仿真 高级仿真热体和流体分析技术

UG-NX有限元仿真高级仿真热体和流体分析技术概述UG-NX(Unigraphics-NX)是一款由西门子PLM软件开发的计算机辅助设计(CAD)、计算机辅助制造(CAM)和计算机辅助工程(CAE)软件。
UG-NX提供了一系列高级仿真工具,其中包括热体和流体分析技术。
本文档将介绍UG-NX中的高级仿真热体和流体分析技术及其应用。
1. UG-NX高级仿真热体分析技术UG-NX提供了强大的热体分析功能,能够对热传导、热辐射和热对流等问题进行模拟和分析。
以下是UG-NX高级仿真热体分析技术的一些主要特点:1.1 热传导分析UG-NX可以模拟和分析材料之间的热传导过程。
用户可以定义材料的热导率,以及模型的初始温度和边界条件。
通过求解热传导方程,UG-NX可以计算出模型在不同时间和位置的温度分布,并可视化显示结果。
1.2 热辐射分析UG-NX还提供了热辐射分析功能,用户可以定义模型表面的辐射率和环境温度,并模拟物体通过辐射释放热量的过程。
UG-NX可以计算出模型在不同条件下的表面温度分布,并可生成热辐射通量图,帮助用户深入了解热辐射对模型的影响。
1.3 热对流分析UG-NX还支持热对流分析,用户可以定义模型与周围流体之间的热传递系数,并模拟固体物体通过对流传热的过程。
UG-NX可以计算出模型在不同空气速度和温度差条件下的温度分布,并可生成热传递系数分布图,帮助用户评估对流对模型的影响。
2. UG-NX高级仿真流体分析技术UG-NX还提供了强大的流体分析功能,能够对流体的流动和压力进行模拟和分析。
以下是UG-NX高级仿真流体分析技术的一些主要特点:2.1 流动分析UG-NX可以模拟和分析流体在不同几何体和边界条件下的流动行为。
用户可以定义流体的初始条件和边界条件,并采用Navier-Stokes方程求解器对流动进行数值求解。
UG-NX可以计算出流体的速度场、压力场和流线图,帮助用户了解流体在模型内的流动情况。
UG软件的高级仿真教程
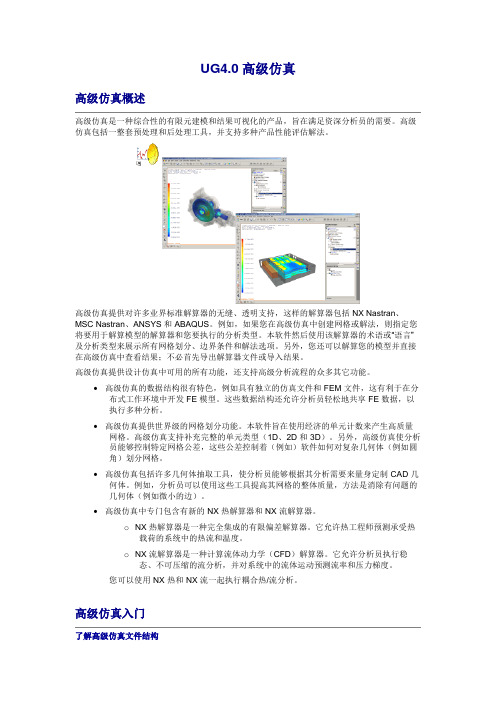
UG4.0高级仿真高级仿真概述高级仿真是一种综合性的有限元建模和结果可视化的产品,旨在满足资深分析员的需要。
高级仿真包括一整套预处理和后处理工具,并支持多种产品性能评估解法。
高级仿真提供对许多业界标准解算器的无缝、透明支持,这样的解算器包括 NX Nastran、MSC Nastran、ANSYS 和 ABAQUS。
例如,如果您在高级仿真中创建网格或解法,则指定您将要用于解算模型的解算器和您要执行的分析类型。
本软件然后使用该解算器的术语或“语言”及分析类型来展示所有网格划分、边界条件和解法选项。
另外,您还可以解算您的模型并直接在高级仿真中查看结果;不必首先导出解算器文件或导入结果。
高级仿真提供设计仿真中可用的所有功能,还支持高级分析流程的众多其它功能。
•高级仿真的数据结构很有特色,例如具有独立的仿真文件和 FEM 文件,这有利于在分布式工作环境中开发 FE 模型。
这些数据结构还允许分析员轻松地共享 FE 数据,以执行多种分析。
•高级仿真提供世界级的网格划分功能。
本软件旨在使用经济的单元计数来产生高质量网格。
高级仿真支持补充完整的单元类型(1D、2D 和 3D)。
另外,高级仿真使分析员能够控制特定网格公差,这些公差控制着(例如)软件如何对复杂几何体(例如圆角)划分网格。
•高级仿真包括许多几何体抽取工具,使分析员能够根据其分析需要来量身定制 CAD 几何体。
例如,分析员可以使用这些工具提高其网格的整体质量,方法是消除有问题的几何体(例如微小的边)。
•高级仿真中专门包含有新的 NX 热解算器和 NX 流解算器。
o NX 热解算器是一种完全集成的有限偏差解算器。
它允许热工程师预测承受热载荷的系统中的热流和温度。
o NX 流解算器是一种计算流体动力学(CFD)解算器。
它允许分析员执行稳态、不可压缩的流分析,并对系统中的流体运动预测流率和压力梯度。
您可以使用 NX 热和 NX 流一起执行耦合热/流分析。
高级仿真入门了解高级仿真文件结构高级仿真在四个独立而关联的文件中管理仿真数据。
利用UGNX6.0软件的运动仿真功能让模具“动起来”

利用UGNX6.0软件的运动仿真功能让模具“动起来”随着中国汽车行业的快速发展,各汽车厂为了尽可能早的抢占市场,对汽车模具的生产周期要求越来越短,精度要求越来越高,这就对模具设计以及制造等各个环节提出了更高的要求.随着CAD/CAM技术的深入应用,二维设计逐渐显现出越来越多的劣势,三维设计也就自然而然的成为国内汽车模具设计人员必须掌握的设计手段。
对模型进行运动仿真也就有了依据。
UGNX自带的机构运动分析模块MOTION提供机构仿真分析和文档生成功能,可在U G环境定义机构,包括铰链、连杆、弹簧、阻尼、初始运动条件、添加阻力等,然后直接在UG中进行分析,仿真机构运动。
设计人员可以分析反作用力、图解合成位移、速度、加速度曲线,反作用力可输入有限元分析。
采用UGNX自带的机构运动分析模块MOTION提供机构的仿真分析功能可以极其方便的对设计方案进行模拟、验证、修改、优化,彻底改变传统机械设计方案需要组织研究团队进行复杂设计计算,制造物理机验证结果的冗长过程,缩短生产周期,节约设计成本。
一旦熟练的掌握了此方法,就可以在极短的时间内给出完整且极具说服力的设计方案。
接下来本文将结合模具实例介绍三维实体模具实现运动仿真的简单过程。
图1是一套拉延模具的三维示意图。
第一步:数据准备阶段在进行运动仿真模拟之前我们需要对已经设计好的三维模具进行简单的数据整理:由于模具设计工程师大都习惯按照最终工作状态来开展设计,然而进行运动仿真时我们一般都习惯于从非工作状态开始进行。
这步操作很简单:假设这套模具在非工作状态所有的上模内容需要沿着Z轴正方向移动1000mm,压边圈组件的工作行程是120mm(需要沿着Z轴正方向移动120mm)。
那么我们按着要求移动相关实体模型到指定位置即可。
移动前后效果见图1和图2。
图1 模具工作状态图2 模具非工作状态(打开状态)第二步:进入运动仿真模块数据准备完成以后我们首先要进入运动仿真模块才能进行相关操作。