基于Matlab技术的4_RP_RR_R并联机构的运动仿真
基于Matlab技术的4-RP(RR)R并联机构的运动仿真
王 艳 钱月霞
(常州机电职业技术学院 江苏 常州 213000)
摘 要: 并联机器人是一类全新的机器人,它具有刚性大、承载能力强、加速度大、控制容易等一系列优点,对一种新型的4自由度并联机构4-RP (RR )R 进行机构分析,通过公式推导其运行轨迹,测算该并联机构能够运动到的位置,并通过Matlab 软件进行该机构的运动仿真研究,进一步证实推导数据,对4-RP (RR )R 机构性能的进一步分析提供可靠依据。
关键词: 并联机器人;自由度;Matlab ;仿真
中图分类号:TP2 文献标识码:A 文章编号:1671-7597(2011)0110173-02
0 引言
机构的运动输入时,工作平台可以沿X ,Y ,Z 三个方向平移,且可以绕Z 轴转动。在研究本机构时,我们把工作平台的中心点P 在O-xyz 坐标系下的坐标设机器人是现代科学技术发展的必然产物,因为人们总是设法让机器为(0,0,10.8),且没有相对Z 轴转动时的位形作为机构的初始位形[4]。来代替人的繁重工作,从而发明了各种各样的机器。机器的发展和其他机构尺寸初始值为:固定平台边长为15cm ;工作平台长12cm 、宽9cm ;杆件事物的发展一样,遵循着由低级到高级的发展规律,机器发展的最高形3长为7cm ,杆件7长为8cm ,杆件9长为6cm 。各支链中的杆件3皆与工作平台式必然是机器人。
呈120度。
现今的机器人正向第三代智能机器人方向发展,这将极大的拓展机因此我们不妨设机构工作平台中点P ,在O-xyz 坐标系下的坐标为(Px ,器人的应用场合和提高产品质量。在串联机器人发展方兴未艾时,澳大Py ,Pz ),及工作平台相对Z 轴的旋转角度为α,这样整个机构的位形就确利亚著名机构学教授Hunt 在1978年提出6自由度的Stewart 平台机构作为定了。具体方法如下:因为四个支链机构相同,所以这里我们只以第一支链机器人机构,也就是并联机器人。
为例,其它支链求法与之类似。首先:利用给出的P 点的坐标(Px ,Py ,1 4-RP(RR)R机构分析
Pz ),以及转角α。确定图中D 点的坐标:
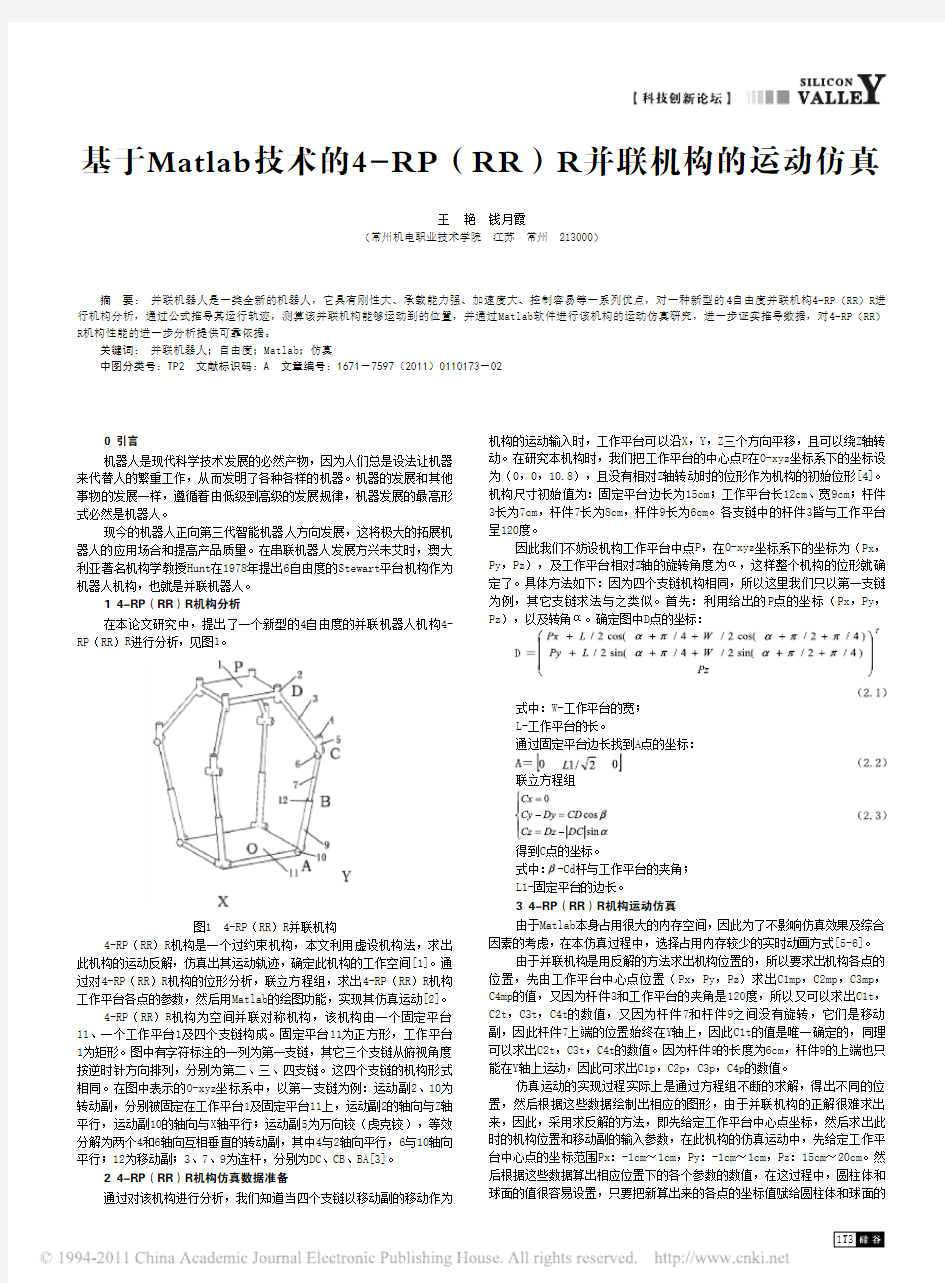
在本论文研究中,提出了一个新型的4自由度的并联机器人机构4-RP (RR )R 进行分析,见图1。
图1 4-RP (RR )R 并联机构
4-RP (RR )R 机构是一个过约束机构,本文利用虚设机构法,求出此机构的运动反解,仿真出其运动轨迹,确定此机构的工作空间[1]。通过对4-RP (RR )R 机构的位形分析,联立方程组,求出4-RP (RR )R 机构工作平台各点的参数,然后用Matlab 的绘图功能,实现其仿真运动[2]。
4-RP (RR )R 机构为空间并联对称机构,该机构由一个固定平台11、一个工作平台1及四个支链构成。固定平台11为正方形,工作平台1为矩形。图中有字符标注的一列为第一支链,其它三个支链从俯视角度按逆时针方向排列,分别为第二、三、四支链。这四个支链的机构形式相同。在图中表示的O-xyz 坐标系中,以第一支链为例:运动副2、10为转动副,分别被固定在工作平台1及固定平台11上,运动副2的轴向与Z 轴平行,运动副10的轴向与X 轴平行;运动副5为万向铰(虎克铰),等效分解为两个4和6轴向互相垂直的转动副,其中4与2轴向平行,6与10轴向平行;12为移动副;3、7、9为连杆,分别为DC 、CB 、BA[3]。
2 4-RP(RR)R机构仿真数据准备
通过对该机构进行分析,我们知道当四个支链以移动副的移动作为
式中:W-工作平台的宽;L-工作平台的长。
通过固定平台边长找到A 点的坐标:联立方程组
得到C 点的坐标。
式中: -Cd 杆与工作平台的夹角;L1-固定平台的边长。
3 4-RP(RR)R机构运动仿真
由于Matlab 本身占用很大的内存空间,因此为了不影响仿真效果及综合因素的考虑,在本仿真过程中,选择占用内存较少的实时动画方式[5-6]。
由于并联机构是用反解的方法求出机构位置的,所以要求出机构各点的位置,先由工作平台中心点位置(Px ,Py ,Pz )求出
C1mp ,C2mp ,C3mp ,C4mp 的值,又因为杆件3和工作平台的夹角是120度,所以又可以求出C1t ,C2t ,C3t ,C4t 的数值,又因为杆件7和杆件9之间没有旋转,它们是移动副,因此杆件7上端的位置始终在Y 轴上,因此C1t 的值是唯一确定的,同理可以求出C2t ,C3t ,C4t 的数值。因为杆件9的长度为6cm ,杆件9的上端也只能在Y 轴上运动,因此可求出C1p ,C2p ,C3p ,C4p 的数值。
仿真运动的实现过程实际上是通过方程组不断的求解,得出不同的位置,然后根据这些数据绘制出相应的图形,由于并联机构的正解很难求出来,因此,采用求反解的方法,即先给定工作平台中心点坐标,然后求出此时的机构位置和移动副的输入参数,在此机构的仿真运动中,先给定工作平台中心点的坐标范围Px :-1cm ~1cm ,Py :-1cm ~1cm ,Pz :15cm ~20cm 。然后根据这些数据算出相应位置下的各个参数的数值,在这过程中,圆柱体和球面的值很容易设置,只要把新算出来的各点的坐标值赋给圆柱体和球面的
坐标值就能实现,而长方体赋值方式不一样,前面已经介绍过,绘制长方体的时候需要8个顶点的坐标值,而重新赋值的时候需要赋6个面,即24个顶点的坐标值,具体赋值方法如下例,如果将参数X 坐标、Y 坐标、Z 坐标指定为矢量,则Matlab 将特定的点连接从而绘制一个多边形。如果此处的坐标参数不是矢量,而是矩阵,则Matlab 将根据该矩阵的每一列绘制一个多边形,从而生成一个多面片块对象。除此之外,我们还可以以每个顶点的坐标及其连接为多边形时的排列顺序。如图2:
图2 多面片块对象
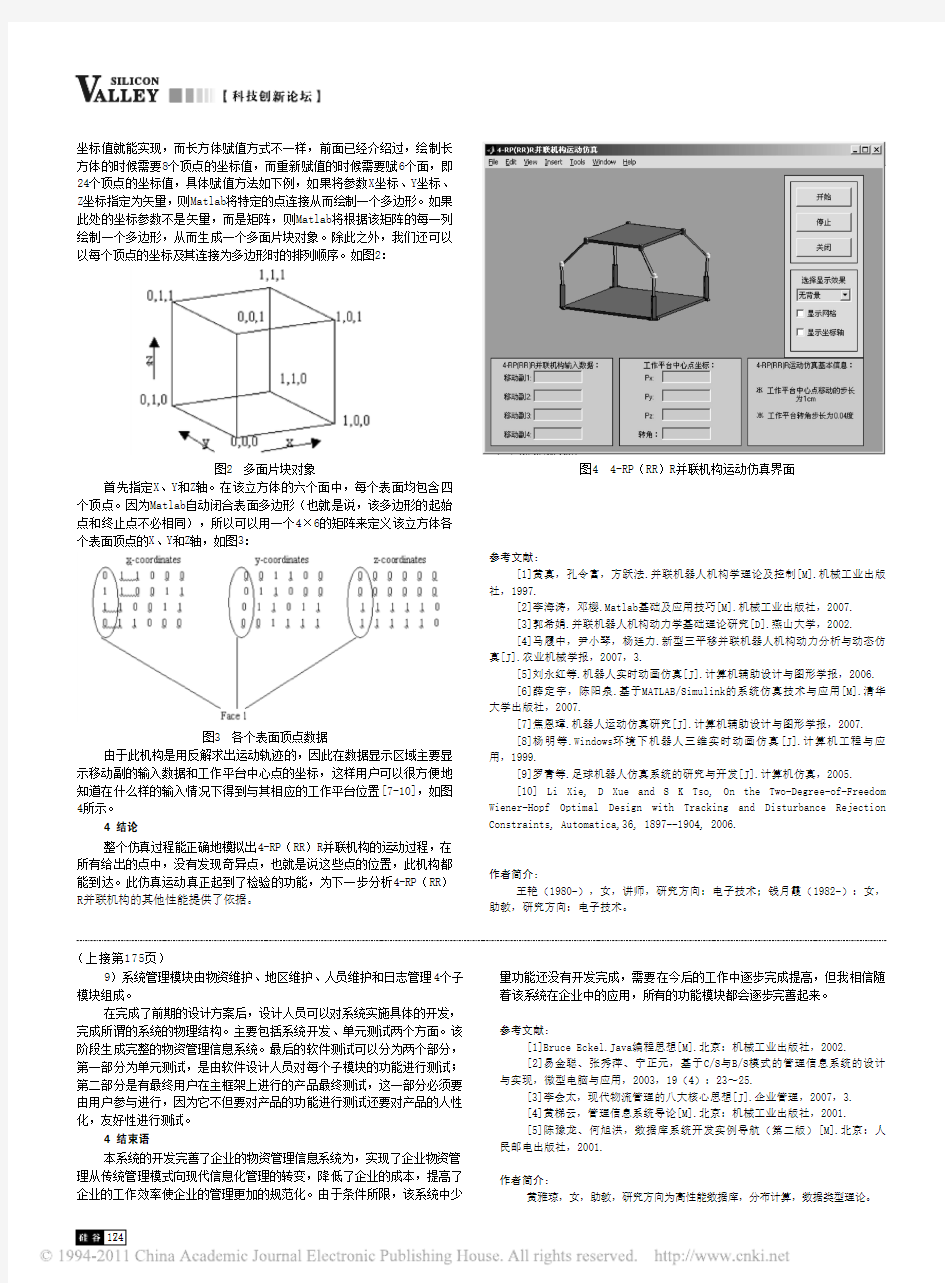
图4 4-RP (RR )R 并联机构运动仿真界面
首先指定X 、Y 和Z 轴。在该立方体的六个面中,每个表面均包含四个顶点。因为Matlab 自动闭合表面多边形(也就是说,该多边形的起始点和终止点不必相同),所以可以用一个4×6的矩阵来定义该立方体各个表面顶点的X 、Y 和Z 轴,如图3:
参考文献:
[1]黄真,孔令富,方跃法.并联机器人机构学理论及控制[M].机械工业出版社,1997.
[2]李海涛,邓樱.Matlab 基础及应用技巧[M].机械工业出版社,2007.[3]郭希娟.并联机器人机构动力学基础理论研究[D].燕山大学,2002.
[4]马履中,尹小琴,杨廷力.新型三平移并联机器人机构动力分析与动态仿真[J].农业机械学报,2007,3.
[5]刘永红等.机器人实时动画仿真[J].计算机辅助设计与图形学报,2006.[6]薛定宇,陈阳泉.基于MATLAB/Simulink 的系统仿真技术与应用[M].清华大学出版社,2007.
[7]焦恩璋.机器人运动仿真研究[J].计算机辅助设计与图形学报,2007.图3 各个表面顶点数据
[8]杨明等.Windows 环境下机器人三维实时动画仿真[J].计算机工程与应由于此机构是用反解求出运动轨迹的,因此在数据显示区域主要显用,1999.
示移动副的输入数据和工作平台中心点的坐标,这样用户可以很方便地[9]罗青等.足球机器人仿真系统的研究与开发[J].计算机仿真,2005.
知道在什么样的输入情况下得到与其相应的工作平台位置[7-10],如图[10] Li Xie, D Xue and S K Tso, On the Two-Degree-of-Freedom Wiener-Hopf Optimal Design with Tracking and Disturbance Rejection 4所示。
Constraints, Automatica,36, 1897--1904, 2006.
4 结论
整个仿真过程能正确地模拟出4-RP (RR )R 并联机构的运动过程,在所有给出的点中,没有发现奇异点,也就是说这些点的位置,此机构都作者简介:
能到达。此仿真运动真正起到了检验的功能,为下一步分析4-RP (RR )王艳(1980-),女,讲师,研究方向:电子技术;钱月霞(1982-):女,R 并联机构的其他性能提供了依据。
助教,研究方向:电子技术。
9)系统管理模块由物资维护、地区维护、人员维护和日志管理4个子量功能还没有开发完成,需要在今后的工作中逐步完成提高,但我相信随模块组成。
着该系统在企业中的应用,所有的功能模块都会逐步完善起来。
在完成了前期的设计方案后,设计人员可以对系统实施具体的开发,参考文献:
完成所谓的系统的物理结构。主要包括系统开发、单元测试两个方面。该[1]Bruce Eckel.Java 编程思想[M].北京:机械工业出版社,2002.
阶段生成完整的物资管理信息系统。最后的软件测试可以分为两个部分,[2]易金聪、张秀萍、宁正元,基于C/S 与B/S 模式的管理信息系统的设计第一部分为单元测试,是由软件设计人员对每个子模块的功能进行测试;与实现,微型电脑与应用,2003,19(4):23~25.
第二部分是有最终用户在主框架上进行的产品最终测试,这一部分必须要[3]李会太,现代物流管理的八大核心思想[J].企业管理,2007,3.由用户参与进行,因为它不但要对产品的功能进行测试还要对产品的人性[4]黄梯云,管理信息系统导论[M].北京:机械工业出版社,2001.
化,友好性进行测试。
[5]陈豫龙、何旭洪,数据库系统开发实例导航(第二版)[M].北京:人4 结束语
民邮电出版社,2001.
本系统的开发完善了企业的物资管理信息系统为,实现了企业物资管理从传统管理模式向现代信息化管理的转变,降低了企业的成本,提高了作者简介:
企业的工作效率使企业的管理更加的规范化。由于条件所限,该系统中少
黄雅琼,女,助教,研究方向为高性能数据库,分布计算,数据类型理论。
(上接第175页)