19种测量电路图集合
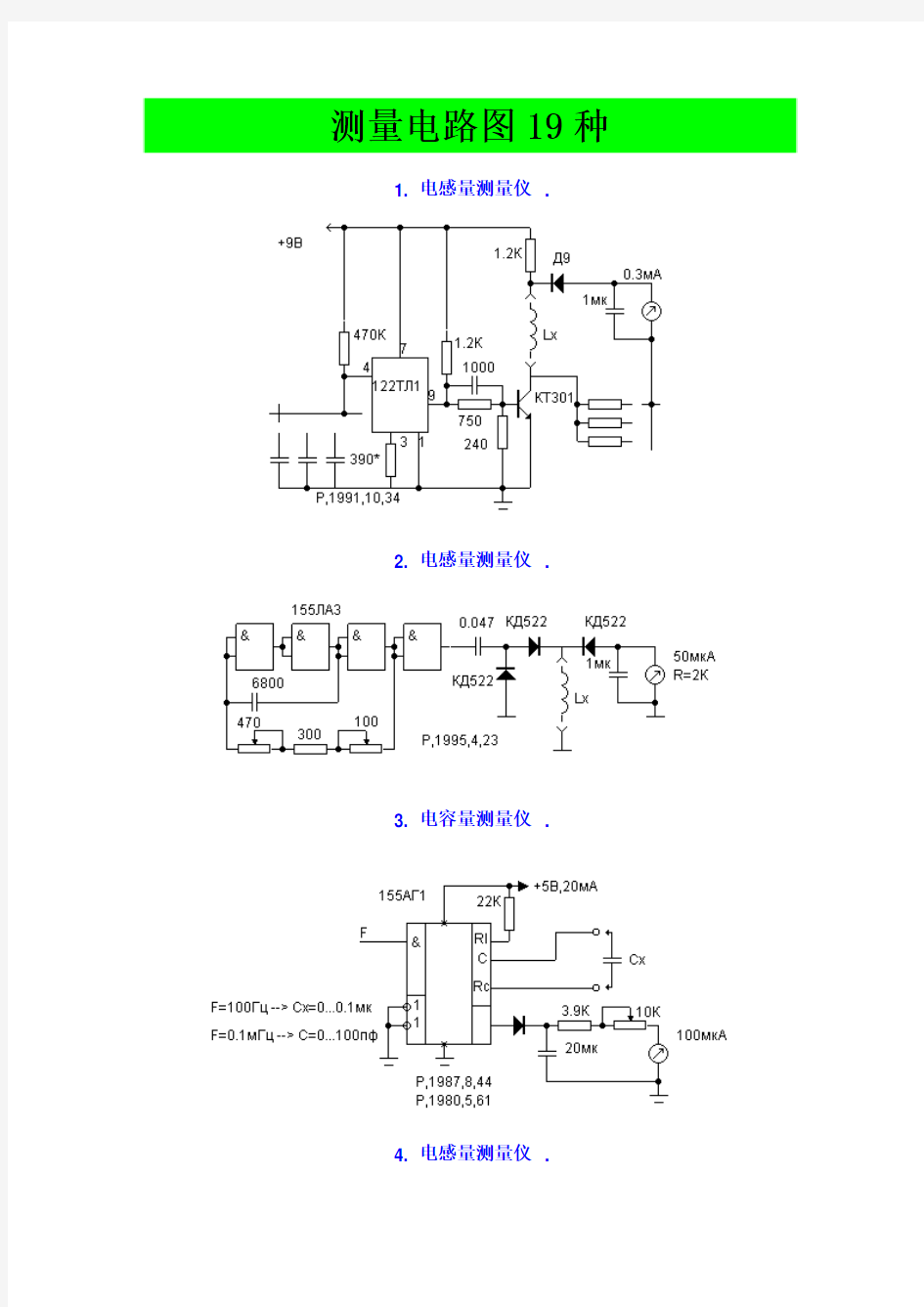
1. 电感量测量仪 .
2. 电感量测量仪 .
3. 电容量测量仪 .
4. 电感量测量仪 .
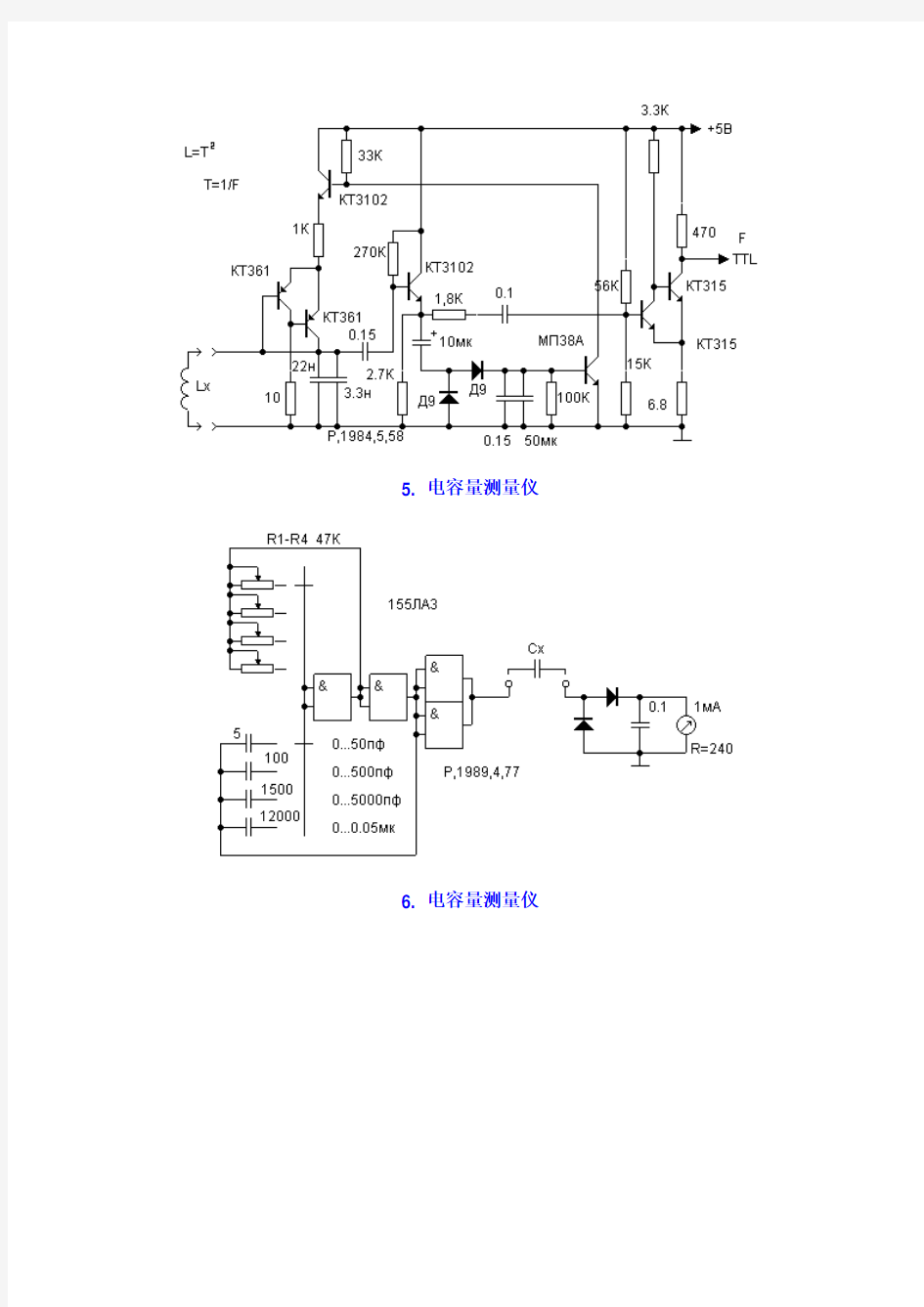
5. 电容量测量仪
6. 电容量测量仪
7. 电感量测量仪
8. 天线电流测量仪
9.高灵敏毫伏表.
10电感量和电容量测量仪
11电感量和电容量测量仪
12.高频振幅整流伏特计.
13. 电容量测量仪.
14. 交流线性伏特计
15. 伦琴射线表- 光度计.
16. 非线性双Т标准桥
17. 线性刻度交流晶体管伏特计
18. 测量天线辐射阻抗.
信号发生器调到要测量天线阻抗的频率上,转换开关S置于位置1.天线调到选用的频率,用可变电感量L调直到安培表指示达到最大值Im.然后转换开关转换到位置2,调C的电容量获得安培表最大指示.然后调电阻器R直到安培表重新指示Im.这个位置R的数值等于天线在选用的频率上的辐射阻抗Rr.天线辐射的功
率Pr 等于: Pr=(Im^2)*Rr .
福州大学集成电路应用实验一
《集成电路应用》课程实验实验一 4053门电路综合实验 学院:物理与信息工程学院 专业: 电子信息工程 年级: 2015级 姓名:张桢 学号: 指导老师:许志猛
实验一 4053门电路综合实验 一、实验目的: 1.掌握当前广泛使用的74/HC/HCT系列CMOS集成电路、包括门电路、反相 器、施密特触发器与非门等电路在振荡、整形、逻辑等方向的应用。 2.掌握4053的逻辑功能,并学会如何用4053设计门电路。 3.掌握多谐振荡器的设计原理,设计和实现一个多谐振荡器,学会选取和 计算元件参数。 二、元件和仪器: 1.CD4053三2通道数字控制模拟开关 2.万用表 3.示波器 4.电阻、电容 三、实验原理: 1.CD4053三2通道数字控制模拟开关 CD4053是三2通道数字控制模拟开关,有三个独立的数字控制输入端A、B、C和INH输入,具有低导通阻抗和低的截止漏电流。幅值为4.5~20V的数字信号可控制峰-峰值至20V的数字信号。CD4053的管脚图和功能表如下所示 4053引脚图
4053的8种逻辑功能 CD4053真值表 根据CD4053的逻辑功能,可以由CD4053由4053电路构成如下图所示8种逻辑门(反相器与非门或非门、反相器、三态门、RS 触发器、——RS 触发器、异或门等)。 输入状态 接通通道
]) 2)(()(ln[ T DD T DD T DD T V V V V V V V RC T -+--=2.多谐振荡器的设计 非门作为一个开关倒相器件,可用以构成各种脉冲波形的产生电路。电路的基本工作原理是利用电容器的充放电,当输入电压达到与非门的阈值电压VT 时,门的输出状态即发生变化。因此,电路输出的脉冲波形参数直接取决于电路中阻容元件的数值。 可以利用反相器设计出如下图所示的多谐振荡器 这样的多谐振荡器输出的信号周期计算公式为: 当R S ≈2R 时,若:VT=0.5VDD ,对于HC 和HCU 型器件,有 T ≈2.2RC 对于HCT 型器件,有 T ≈2.4RC 四、实验内容: 1. 验证CD4053的逻辑功能,用4053设计门电路,并验证其逻辑功能: (1)根据实验原理设计如下的反相器电路图: CD4053构成反相器电路
了解一下集成电路的基础知识要点
了解一下集成电路的基础知识要点 将许多电阻、二极管和三极管等元器件以电路的形式制作半导体硅片上,然后接出引脚并封装起来,就构成了集成电路。集成电路简称为 集成块,下图 (a)所示的LM380就是一种常见的音频放大集成电路, 其内部电路如图(b)所示。 图 (a) 图(b) 对于大多数人来说,不用了解内部电路具体结构,只需知道集成电路 的用途和各引脚的功能。 单独集成电路是无法工作的,需要给它加接相应的外围元件并提供电 源才能工作。下图中的集成电路LM380提供了电源并加接了外围元件,它就可以对6脚输入的音频信号进行放大,然后从8脚输出放大的音 频信号,再送入扬声器使之发声。 有些时候,我们会把集成电路和芯片混为一谈,比如在大家平常讨论 话题中,集成电路设计和芯片设计说的是一个意思,芯片行业、集成 电路行业、IC行业往往也是一个意思。实际上,这两个词有联系,也 有区别。集成电路实体往往要以芯片的形式存在,因为狭义的集成电路,是强调电路本身,比如简单到只有五个元件连接在一起形成的相 移振荡器,当它还在图纸上呈现的时候,我们也可以叫它集成电路, 当我们要拿这个小集成电路来应用的时候,那它必须以独立的一块实物,或者嵌入到更大的集成电路中,依托芯片来发挥他的作用;集成 电路更着重电路的设计和布局布线,芯片更强调电路的集成、生产和 封装。而广义的集成电路,当涉及到行业(区别于其他行业)时,也 可以包含芯片相关的各种含义。 芯片也有它独特的地方,广义上,只要是使用微细加工手段制造出来 的半导体片子,都可以叫做芯片,里面并不一定有电路。比如半导体 光源芯片;比如机械芯片,如MEMS陀螺仪;或者生物芯片如DNA芯片。
红外线测距仪测量原理
红外线测距仪测量原理 测距仪是一种航迹推算仪器,用于测量目标距离,进行航迹推算。测距仪的形式很多,通常是一个长形圆筒,由物镜、目镜、测距转钮组成,用来测定目标距离。测距仪是根据光学、声学和电磁波学原理设计的,用于距离测量的仪器。 红外测距仪的分类有激光红外,红外和超声波三种,目前测距仪主要是指的激光红外测距仪,红外测距仪和超声波测距仪由于测量距离有限,测量精度很低目前已经被淘汰。激光红外测距仪是利用激光对目标的距离进行准确测定的仪器。激光红外测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。 测距仪有测量距离和测量精度,同时又是电子设备,所以品牌的选择非常重要,国际知名品牌的测距仪,在性能上会远优于杂牌的激光红外测距仪。 一.测距仪分类 测距仪从测距基本原理,可以分为以下三类: 1. 激光测距仪 激光测距仪是利用激光对目标的距离进行准确测定的仪器。激光测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。 激光测距仪是目前使用最为广泛的测距仪,激光测距仪又可以分类为手持式激光测距仪(测量距离0-300米),望远镜激光测距仪(测量距离500-20000米)。 目前市面上主流的都是激光测距仪,手持式激光测距仪全球前两大品牌是徕卡和博世,右图就是一款主流的手持式激光测距仪。 望远镜激光测距仪,为远距离激光测距仪,目前在户外使用相当广泛,望远镜激光测距仪全球前四大品牌是图雅得、博士能、奥尔法和尼康。四个品牌在产品上各有特点,2013年,美国激光技术杂志公布的数据,2013年全球单品销售冠军是图雅得SP1500,这款测距仪测量精准,反应速度快捷。 2. 超声波测距仪
超声波测距仪硬件电路的设计
超声波测距仪电路设计实验报告 轮机系楼宇071 周钰泉2007212117 实验目的:了解超声波测距仪的原理,掌握焊接方法,掌握电路串接方法,熟悉电路元件。 实验设备及器材:电烙铁,锡线,电路元件 实验步骤:1,学习keil软件编写程序2、焊接电路板3、运行调试 超声波测距程序: #include
unsigned char i; sbit ST=P3^0; sbit OE=P3^1; sbit EOC=P3^4; sbit CLK=P3^5; sbit M1=P3^6; sbit M2=P3^7; sbit SPK=P2^6; sbit LA=P3^3; sbit LB=P3^2; sbit LC=P2^7; sbit K1=P2^4; sbit K2=P2^5; bit wd; bit yw; bit shuid; bit shuig; unsigned int cnta; unsigned int cntb; bit alarmflag; void delay10ms(void) { unsigned char i,j; for(i=20;i>0;i--) for(j=248;j>0;j--); } void main(void) { M1=0; M2=0; yw=1; wd=0; SPK=0; ST=0; OE=0; TMOD=0x12; TH0=0x216; TL0=0x216; TH1=(65536-500)/256; TL1=(65536-500)%256; TR1=1; TR0=1; ET0=1; ET1=1; EA=1; ST=1; ST=0; while(1) { if(K1==0) { delay10ms(); if(K1==0) { yw=1; wd=0; } } else if(K2==0) { delay10ms(); if(K2==0) { wd=1; yw=0; } } else if(LC==1) { delay10ms(); if(LC==1) { M1=0; M2=1; temp1=13; shuid=0; shuig=1; LB=0; } } else if((LC==0) && (LB==1)) { delay10ms(); if((LC==0) && (LB==1)) { M1=0; M2=0; temp1=12; shuig=0; shuid=0; LB=0; }
福州大学集成电路应用实验一
福州大学集成电路应用实验一
————————————————————————————————作者:————————————————————————————————日期:
《集成电路应用》课程实验实验一 4053门电路综合实验 学院:物理与信息工程学院 专业: 电子信息工程 年级: 2015级 姓名:张桢 学号: 指导老师:许志猛
实验一 4053门电路综合实验 一、实验目的: 1.掌握当前广泛使用的74/HC/HCT系列CMOS集成电路、包括门电路、反相 器、施密特触发器与非门等电路在振荡、整形、逻辑等方向的应用。 2.掌握4053的逻辑功能,并学会如何用4053设计门电路。 3.掌握多谐振荡器的设计原理,设计和实现一个多谐振荡器,学会选取和 计算元件参数。 二、元件和仪器: 1.CD4053三2通道数字控制模拟开关 2.万用表 3.示波器 4.电阻、电容 三、实验原理: 1.CD4053三2通道数字控制模拟开关 CD4053是三2通道数字控制模拟开关,有三个独立的数字控制输入端A、B、C和INH输入,具有低导通阻抗和低的截止漏电流。幅值为4.5~20V的数字信号可控制峰-峰值至20V的数字信号。CD4053的管脚图和功能表如下所示 4053引脚
4053的8种逻辑功能 CD4053真值表 根据CD4053的逻辑功能,可以由CD4053由4053电路构成如下图所示8种逻辑门(反相器与非门或非门、反相器、三态门、RS 触发器、——RS 触发器、异或门等)。 输入状态 接通通道
]) 2)(()(ln[ T DD T DD T DD T V V V V V V V RC T -+--=2.多谐振荡器的设计 非门作为一个开关倒相器件,可用以构成各种脉冲波形的产生电路。电路的基本工作原理是利用电容器的充放电,当输入电压达到与非门的阈值电压VT 时,门的输出状态即发生变化。因此,电路输出的脉冲波形参数直接取决于电路中阻容元件的数值。 可以利用反相器设计出如下图所示的多谐振荡器 这样的多谐振荡器输出的信号周期计算公式为: 当R S ≈2R 时,若:VT=0.5VDD ,对于HC 和HCU 型器件,有 T ≈2.2RC 对于HCT 型器件,有 T ≈2.4RC 四、实验内容: 1. 验证CD4053的逻辑功能,用4053设计门电路,并验证其逻辑功能: (1)根据实验原理设计如下的反相器电路图: CD4053构成反相器电路
基于单片机的红外测距系统设计-开题报告
武汉大学珞珈学院本科生毕业论文(设计)开题报告 论文题目:基于单片机的红外测距系统设计 系:电子信息科学系学号: 20100802041 姓名:钱源 一、论文选题的目的和意义 红外线是不可见光,是电磁波的一种形式,可以用来进行距离的测量,其应用历史可以追溯到上世纪60年代。现代科学技术的发展进入了许多新领域,而在测距方面先后出现了激光测距、微波雷达测距、超声波测距及红外线测距。其中激光测距是靠激光束照射在物体上反射回来的激光束探测物体的距离。由于受恶劣的天气、污染等因素影响,使反射的激光束在一定功率上探测距离比可能探测的最大距离减少一半左右,损失很大,影响探测的精确度;微波雷达测距技术为军事和某些工业开发采用的装备和振荡器等电路部分价格昂贵,现在几乎还没有开拓民用市场;超声波测距在国内外已有人做过研究,由于采用特殊专用组件使其价格高,难以推广;红外线作为一种特殊的光波,具有光波的基本物理传输特性—反射、折射、散射等,且由于其技术难度相对不太大,构成的测距系统成本低廉,性能优良,便于民用推广。另外红外测距的应用越来越普遍。在很多领域都可以用到红外测距仪。红外测距一般具有精确度和分辨率高、抗干扰能力强、体积小、重量轻等优点,因而应用领域广、行业需求众多,市场需求空间大。 红外测距的研究就非常有意义了。红外线测距仪指的就是激光红外线测距仪,红外测距仪----用调制的红外光进行精密测距的仪器,测程一般为1-5公里。在100米以内则超声波测距更有优势,但是超声波测距的距离一般无法测量1米以内,而红外测距则可以这一段距离的不足,而且有着不错的精度,在本课题中研究的就是这一类情况的红外线测距。 二、国内外关于该论题的研究现状和发展趋势 (1)国内: 根据《国内近年来红外光电测距仪的发展情况》,随着国家对外开放政策的实施和测量工作的需要,近年来国内一些光学仪器厂和电子仪器厂分别从瑞典、瑞士和日本等国引进几种红外测距仪组装线,组装测距仪,我国有关工厂和院校近年来也研制出一些产品。由于微处理机在国产测距仪上的应用,大大缩小了仪器的体积,同时也减少了出故障的几率,使得国产测距仪的性能和质量都较过去有很大的提高。在国家“六·五”计划攻关中,常州第二电子仪器厂研制的DCHZ 型多功能红外测距仪就是一个很好的例证。该产品经国家测绘局测绘科学研究所光电测距仪检测巾心进行全面质量鉴定后认为:该仪器外型美观、体积小、重量
(整理)集成电路IC知识
集成电路IC常识 中国半导体器件型号命名方法 第一部分:用数字表示半导体器件有效电极数目。 第二部分:用汉语拼音字母表示半导体器件的材料和极性 第三部分:用汉语拼音字母表示半导体器件的内型。 第四部分:用数字表示序号 第五部分:用汉语拼音字母表示规格号 日本半导体分立器件型号命名方法 第一部分:用数字表示器件有效电极数目或类型。 第二部分:日本电子工业协会JEIA注册标志。 第三部分:用字母表示器件使用材料极性和类型。 第四部分:用数字表示在日本电子工业协会JEIA登记的顺序号。 第五部分:用字母表示同一型号的改进型产品标志。 集成电路(IC)型号命名方法/规则/标准 原部标规定的命名方法X XXXXX 电路类型电路系列和电路规格符号电路封装T:TTL;品种序号码(拼音字母)A:陶瓷扁平; H:HTTL;(三位数字) B :塑料扁平; E:ECL; C:陶瓷双列直插; I:I-L; D:塑料双列直插; P:PMOS; Y:金属圆壳; N:NMOS; F:金属菱形; F:线性放大器; W:集成稳压器; J:接口电路。 原国标规定的命名方法CXXXXX中国制造器件类型器件系列和工作温度范围器件封装符号 T:TTL;品种代号C:(0-70)℃;W:陶瓷扁平; H:HTTL;(器件序号)E :(-40~85)℃;B:塑料扁平; E:ECL; R:(-55~85)℃;F:全密封扁平; C:CMOS; M:(-55~125)℃;D:陶瓷双列直插; F:线性放大器; P:塑料双列直插; D:音响、电视电路; J:黑瓷双理直插; W:稳压器; K:金属菱形; J:接口电路; T:金属圆壳; B:非线性电路; M:存储器; U:微机电路;其中,TTL中标准系列为CT1000系列;H 系列为CT2000系列;S系列为CT3000系列;LS系列为CT4000系列; 原部标规定的命名方法CX XXXX中国国标产品器件类型用阿拉伯数字和工作温度范围封装 T:TTL电路;字母表示器件系C:(0~70)℃F:多层陶瓷扁平; H:HTTL电路;列品种G:(-25~70)℃B:塑料扁平; E:ECL电路;其中TTL分为:L:(-25~85)℃H:黑瓷扁平; C:CMOS电路;54/74XXX;E:(-40~85)℃D:多层陶瓷双列直插; M:存储器;54/74HXXX;R:(-55~85)℃J:黑瓷双列直插; U:微型机电路;54/74LXXX;M:(-55~125)℃P:塑料双列直插; F:线性放大器;54/74SXXX; S:塑料单列直插; W:稳压器;54/74LSXXX; T:金属圆壳; D:音响、电视电路;54/74ASXXX; K:金属菱形; B:非线性电路;54/74ALSXXX; C:陶瓷芯片载体; J:接口电路;54/FXXX。 E:塑料芯
红外测距防撞系统
基本原理 红外线发射器不断发射出频率为40 kHz 的红外线,经障碍物反射,红外线接收器接收到反射波信号,并将其转变为电信号。测出发射波与接收到反射波的 时间差t ,即可求出距离s : s =12 ct (1) 式中, c 为光速度,一般取3 ×108 m/ s。本文采用“计数”方式,通过单片机处理进行测量,其基本原理是:红外线发射器始终处于发射红外线的状态,当红外接收器第一次接收到障碍物反射回的红外线时,经电路处理单片机给出一个计数启动信号,单片机的计数器开始以一定频率计数;当红外线接收器第二次接收到反射回的红外线时,经电路处理单片机给出一个停止计数脉冲,计数器停止计数。通过编程,单片机自动处理,用脉冲的周期T 乘以脉冲数n 就得到发射 红外线到接收红外线的时间差t ,即: t = nT (2) (2) 式代入(1) 式就得测量距离。 系统的建立 根据以上的测距原理,设计出系统的基本框图如图1 图1 红外线测距系统基本框图 红外发射电路发射出40 kHz 频率的红外线,当遇到障碍物红外线发生漫反射,红外线接收电路第一次接收到反射的红外线时,给单片机一个信号脉冲,启动单片机内的计数器,计数器置位进入计数状态;当接收电路第二次接收到反射器的红外线时,经单片机处理给出一个信号脉冲,使计数器停止计数,数据被锁存,然后经单片机处理,将测量的距离显示在显示器上。 基本特点 本文研究的汽车红外防撞系统吸收了国内外各种测距仪的部分特点,结合我国汽车电子工业发展方向和现有电子技术基础上而设计出来的,具有以下特点: 1) 汽车在行进中能自动连续跟踪显示障碍物的距离; 2) 在交通量较大的高速公路的车间距离一般为30~50 m ,本装置设置极限全距离为30 m , 当探测的车间距为30 m 时,发出警告声提醒驾驶员注意刹车; 3) 探测的车间距为20 m 时,给出自动刹车信号; 若装有自动刹车装置,则自动刹车减速。
超声波测距电子电路设计详解
超声波测距电子电路设计详解 在自主行走机器人系统中,机器人要实现在未知和不确定环境下行走,必须实时采集环境信息,以实现避障和导航,这必须依靠能实现感知环境信息的传感器系统来实现。视觉、红外、激光、超声波等传感器都在行走机器人中得到广泛应用。由于超声波测距方法设备简单、价格便宜、体积小、设计简单、易于做到实时控制,并且在测量距离、测量精度等方面能达到工业实用的要求,因此得到了广泛的应用。本文所介绍的机器人采用三方超声波测距系统,该系统可为机器人识别其运动的前方、左方和右方环境而提供关于运动距离的信息。 超声波测距原理 超声波发生器内部由两个压电片和一个共振板组成。当它的两极外加脉冲信号,且其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两极间未加外电压,当共振板接收到超声波时,就成为超声波接收器。超声波测距一般有两种方法:①取输出脉冲的平均电压值,该电压与距离成正比,测量电压即可测量距离;②测量输出脉冲的宽度,即发射超声波与接收超声波的时间间隔t,根据被测距离s=vt?2来得到测
量距离,由于超声波速度v与温度有关,所以如果温度变化比较大,应通过温度补偿的方法加以校正。 本测量系统采用第二种方法,由于测量精度要求不是特别高,所以可以认为温度基本不变。本系统以PIC16F877单片机为核心,通过软件编程实现其对外围电路的实时控制,并提供给外围电路所需的信号,包括频率振动信号、数据处理信号等,从而简化了外围电路,且移植性好。系统硬件电路方框图见图1。 图1 系统硬件电路方框图 由于本系统只需要清楚机器人前方、左方、右方是否有障碍物,并不需要知道障碍物与机器人的具体距离,因此不需要显示电路,只需要设定一距离阀值,使障碍物与机器人的距离达到某一值时,单片机控制机器人电机停转,这可通过软件编程实现。
福州大学集成电路应用实验二-参考模板
《集成电路应用》课程实验实验二锁相环综合实验 学院:物理与信息工程学院 专业: 电子信息工程 年级: 2015级 姓名:张桢 学号: 指导老师:许志猛
实验二锁相环综合实验 一、实验目的: 1.掌握锁相环的基本原理。 2.掌握锁相环外部元件的选择方法。 3.应用CD4046锁相环进行基本应用设计。 二、元件和仪器: 1.CD4046 2.函数信号发生器 3.示波器 4.电阻、电容若干 5.面包板 三、实验原理: 1.锁相环的基本原理。 锁相环最基本的结构如图所示。它由三个基本的部件组成:鉴相器(PD)、环路滤波器(LPF)和压控振荡器(VCO)。 锁相环工作原理图 鉴相器是个相位比较装置。它把输入信号Si(t)和压控振荡器的输出信号So(t)的相位进行比较,产生对应于两个信号相位差的误差电压Se(t)。 环路滤波器的作用是滤除误差电压Se(t)中的高频成分和噪声,以保证环路所要求的性能,增加系统的稳定性。
压控振荡器受控制电压Sd(t)的控制,使压控振荡器的频率向输入信号的频率靠拢,直至消除频差而锁定。 锁相环是个相位误差控制系统。它比较输入信号和压控振荡器输出信号之间的相位差,从而产生误差控制电压来调整压控振荡器的频率,以达到与输入信号同频。在环路开始工作时,如果输入信号频率与压控振荡器频率不同,则由于两信号之间存在固有的频率差,它们之间的相位差势必一直在变化,结果鉴相器输出的误差电压就在一定范围内变化。在这种误差电压的控制下,压控振荡器的频率也在变化。若压控振荡器的频率能够变化到与输入信号频率相等,在满足稳定性条件下就在这个频率上稳定下来。达到稳定后,输入信号和压控振荡器输出信号之间的频差为零,相差不再随时间变化,误差电压为一固定值,这时环路就进入“锁定”状态。这就是锁相环工作的大致过程。 2.CD4046芯片的工作原理。 CD4046是通用的CMOS锁相环集成电路,其特点是电源电压范围宽(为3V -18V),输入阻抗高(约100MΩ),动态功耗小,在中心频率f0为10kHz下功耗仅为600μW,属微功耗器件。 CD4046锁相的意义是相位同步的自动控制,功能是完成两个电信号相位同步的自动控制闭环系统叫做锁相环,简称PLL。它广泛应用于广播通信、频率合成、自动控制及时钟同步等技术领域。锁相环主要由相位比较器(PC)、压控振荡器(VCO)、低通滤波器三部分组成,如下所示。 4046组成框图
电子元件封装大全及封装常识
修改者:林子木 电子元件封装大全及封装常识 一、什么叫封装 封装,就是指把硅片上的电路管脚,用导线接引到外部接头处,以便与其它器件连 接.封装形式是指安装半导体集成电路芯片用的外壳。它不仅起着安装、固定、 密封、保护芯片及增强电热性能等方面的作用,而且还通过芯片上的接点用导线 连接到封装外壳的引脚上,这些引脚又通过印刷电路板上的导线与其他器件相连 接,从而实现内部芯片与外部电路的连接。因为芯片必须与外界隔离,以防止空 气中的杂质对芯片电路的腐蚀而造成电气性能下降。另一方面,封装后的芯片也 更便于安装和运输。由于封装技术的好坏还直接影响到芯片自身性能的发挥和与 之连接的PCB(印制电路板)的设计和制造,因此它是至关重要的。 衡量一个芯片封装技术先进与否的重要指标是芯片面积与封装面积之比,这个比 值越接近1 越好。封装时主要考虑的因素: 1、芯片面积与封装面积之比为提高封装效率,尽量接近1:1; 2、引脚要尽量短以减少延迟,引脚间的距离尽量远,以保证互不干扰,提高性 能; 3、基于散热的要求,封装越薄越好。 封装主要分为DIP 双列直插和SMD 贴片封装两种。从结构方面,封装经历了最 早期的晶体管TO(如TO-89、TO92)封装发展到了双列直插封装,随后由PHILIP 公司开发出了SOP 小外型封装,以后逐渐派生出SOJ(J 型引脚小外形封装)、 TSOP(薄小外形封装)、VSOP(甚小外形封装)、SSOP(缩小型SOP)、 TSSOP(薄的缩小型SOP)及SOT(小外形晶体管)、SOIC(小外形集成电 路)等。从材料介质方面,包括金属、陶瓷、塑料、塑料,目前很多高强度工作 条件需求的电路如军工和宇航级别仍有大量的金属封装。 封装大致经过了如下发展进程: 结构方面:TO->DIP->PLCC->QFP->BGA ->CSP; 材料方面:金属、陶瓷->陶瓷、塑料->塑料; 引脚形状:长引线直插->短引线或无引线贴装->球状凸点; 装配方式:通孔插装->表面组装->直接安装 二、具体的封装形式 1、SOP/SOIC 封装 SOP 是英文Small Outline Package 的缩写,即小外形封装。SOP 封装技术由 1968~1969 年菲利浦公司开发成功,以后逐渐派生出SOJ(J 型引脚小外形封 装)、TSOP(薄小外形封装)、VSOP(甚小外形封装)、SSOP(缩小型SOP)、 TSSOP(薄的缩小型SOP)及SOT(小外形晶体管)、SOIC(小外形集成电 路)等。 SOP(Small Out-Line package) 也叫SOIC,小外形封装。表面贴装型封装之一, 引脚从封装两侧引出呈海鸥翼状(L 字形)。材料有塑料和陶瓷两种。SOP 除了用 于存储器LSI 外,也广泛用于规模不太大的ASSP 等电路。在输入输出端子不 超过10~40 的领域,SOP 是普及最广的表面贴装封装。引脚中心距 1.27mm,引脚数从8~44。另外,引脚中心距小于1.27mm 的SOP 也称为SSOP;装配 高度不到1.27mm 的SOP 也称为TSOP。还有一种带有散热片的SOP。
红外测距传感器的工作原理及使用
光电检测技术与应用 论文 题目:红外测距传感器的工作原理及使用 院系:机电工程学院 班级:测控xxxx 完成日期:2017/5/6 小组:第x组 小组成员:xxxxxxxxxx 红外测距传感器的工作原理及使用 摘要: 利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。 关键字:光电检测技术、智能车、测距、红外测距传感器、单片机 一、引言 光电检测作为光学与电子学相结合而产生的一门新兴检测技术,主要包括光信息获取、光电变换、光信息测量以及测量信息的智能化处理等,具有精度高、速度快、距离远、容量大、非接触、寿命长、易于自动化和智能化等优点,在国民经济各行业中得到了迅猛的发展和广泛的应用,如光扫描、光跟踪测量,光纤测量,激光测量,红外测量,图像测量,微光、弱光测量等,是当前最主要和最具有潜力的光电信息技术。
二、光电检测技术的概念 光电检测技术是光学与电子学相结合而产生的一门新兴检测技术。它主要利用电子技术对光学信号进行检测,并进一步传递、储存、控制、计算和显示。光电检测技术从原理上讲可以检测一切能够影响光量和光特性的非电量。它可通过光学系统把待检测的非电量信息变换成为便于接受的光学信息,然后用光电探测器件将光学信息量变换成电量,并进一步经过电路放大、处理,以达到电信号输出的目的。然后采用电子学、信息论、计算机及物理学等方法分析噪声产生的原因和规律,以便于进行相应的电路改进,更好地研究被噪声淹没的微弱有用信号的特点与相关性,从而了解非电量的状态。微弱信号检测的目的是从强噪声中提取有用信号,同时提高测系统输出信号的信噪比。 光电检测技术的系统机构比较简单,分为信号的处理器,受光器,光源。在实际检测过程中,受光器在获得感知信号后,就会被反映为不同形状、颜色的信号,同时根据这些器件所处在的不同位置,就能够将他分为反射型与透过型的两种比较的模式。光电检测的媒介光应当是自然的光,例如白炽灯或者萤光灯。特别是随着这些技术的发展,光电技术也取得的非常好发展。由于投光器在发出光后,会以不一样的方式触摸这些被检测物中,直到照射到检测系统中的受光器中,同时受光器在此刺激下,会产生一定量的电流,这就是我们常说的光敏性的原件,实际生活中应用比较广泛的有三极管、二极管。 三、光电检测技术的应用 智能车方面的应用、家庭扫地机器人方面的应用:利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。 四、常用光电检测器件:红外测距传感器 原理:其输出为电压数值,通过公式L?=?(6762/(9-X))-4可计算出小车与障碍物之间的距离。
集成电路实验 王向展
电子科技大学 实验报告 二、实验项目名称:CMOS模拟集成电路设计与仿真 三、实验地点:211大楼606房间 四、实验学时:4 五、实验目的: (1)综合运用课程所学知识自主完成相应的模拟集成电路版图设计,掌握基本的IC版图布局布线技巧。 (2)学习并掌握国际流行的EDA仿真软件Cadence的使用方法,并进行版图的的设计与验证 六、实验原理: IC设计一般规则: ①根据用途要求,确定系统总体方案 ②根据电路的指标和工作条件,确定电路结构与类型,然后通过模拟计算, 决定电路中各器件的参数(包括电参数、几何参数等),EDA软件进行模拟仿真。 ③根据电路特点选择适当的工艺,再按电路中各器件的参数要求,确定满足 这些参数的工艺参数、工艺流程和工艺条件。 ④按电路设计和确定的工艺流程,把电路中有源器件、阻容元件及互连以一 定的规则布置在硅片上,绘制出相互套合的版图,以供制作各次光刻掩模版用。 ⑤生成PG带制作掩模版 ⑥工艺流片 ⑦测试,划片封装
实验模拟基于Cadence 平台的电路设计与仿真 七、实验内容: 1、UNIX操作系统常用命令的使用,Cadence EDA仿真环境的调用。 2、设计一个运算放大器电路,要求其增益大于60dB, 相位裕度大于45o, 功耗小于10mW。 3、根据设计指标要求,选取、确定适合的电路结构,并进行计算分析。 4、电路的仿真与分析,重点进行直流工作点、交流AC分析、瞬态Trans 分析、建立时间小信号特性和压摆率大信号分析,能熟练掌握各种分析的参数设置方法。 5、电路性能的优化与器件参数调试,要求达到预定的技术指标。 6、整理仿真数据与曲线图表,撰写并提交实验报告。 八、实验仪器与器材 (1)工作站或微机终端一台 (2)EDA仿真软件 1套 九、实验结果: 1、根据实验指导书熟悉UNIX操作系统常用命令的使用,掌握Cadence EDA仿真环境的调用。 2、根据设计指标要求,设计出如下图所示的电路结构。并进行计算分析,确定其中各器件的参数。 4、电路的仿真与分析,重点进行直流工作点、交流AC分析、瞬态Trans分析,能熟练掌握各种分 ①增益与频率之间的关系、相位裕度与频率之间关系图如下所示: ②输入、输出关系曲线 十、实验结果计算与分析: 从幅频特性曲线图像中可以读出,电路的增益A V=59dB略小于设计所要求的60dB;找出增益接近于0时候的截止频率为102.4MHz,对应到下方相频特性曲线图像中为-130o,则相位裕度为180o-130o=50o,
集成电路版图基础知识练习
一、填空 1.ls (填写参数)命令用于显示隐藏文件。(-a) 2.进入当前目录的父目录的命令为 (%cd ..) 3.查看当前工作目录的命令为:(%pwd) 4.目录/home//uuu已建立,当前工作目录为/home/,采用绝对路径进入/home//uuu 的命令为:(%cd /home//uuu) 5.假设对letter文件有操作权限,命令%chmod a+rw letter会产生什么结果:(对 所有的用户增加读写权限。) 6.显示当前时间的命令为:(%date) 7.打开系统管理窗口的命令为:(%admintool) 8.与IP地址为166.111.4.80的主机建立FTP连接的命令为:(%ftp 166.111.4.80 or %ftp %open 166.111.4.80) 9.建立FTP连接后,接收单个文件的命令为:(%get) 10.建立FTP连接后,发送多个文件的命令为:(%mput) 11.有一种称为0.13um 2P5M CMOS单井工艺, 它的特征线宽为______,互连层共有 _____层,其电路类型为_______。0.13um 7 CMOS 12.请根据实际的制造过程排列如下各选项的顺序: a.生成多晶硅 b.确定井的位置和大小 c.定义扩散区,生成源漏区 d.确定有源区的位置和大小 e.确定过孔位置 正确的顺序为:___ _________________。bdace 13.集成电路中的电阻主要有__________, ____________, _____________三种。井电 阻,扩散电阻,多晶电阻 14.为方便版图绘制,通常将Contact独立做成一个单元,并以实例的方式调用。若该 Contact单元称为P型Contact,由4个层次构成,则该四个层次分别为:_________,_________, _________, ___________. active, P+ diffusion, contact, metal. 15.CMOS工艺中,之所以要将衬底或井接到电源或地上,是因为 ___________________________________。报证PN结反偏,使MOS器件能够正常工 作。 16.版图验证主要包括三方面:________,__________,__________; 完成该功能的 Cadence工具主要有(列举出两个):_________,_________。DRC, LVS, ERC, Diva, Dracula 17.造成版图不匹配的因数主要来自两个方面:一是制造工艺引起的,另一个是 __________;后者又可以进一步细分为两个方面:_______________, _____________。片上环境波动,温度波动,电压波动。 18.DRC包括几种常见的类型,如最大面积(Maximum Dimension),最小延伸(Minimum Extension),此外还有_________,_________,_________。最小间距,最小宽度,最小包围(Minimum Enclosure)。 19.减少天线效应的三种方法有:____________,____________,__________。插入二 极管,插入缓冲器,Jumper (或者,通过不同的金属层绕线)。 20.由于EDA工具的不统一,出现了各种不同的文件格式,如LEF, DEF等,业界公认 的Tape out的文件格式为 _______,它不可以通过文本编辑器查看,因为它是
基于STM32的红外测距系统设计学士学位论文
基于STM32的红外测距系统设计 摘要 随着现代科学技术的发展,出现了很多新的领域,为了实现对物体近距离、高精度的无线测量,本论文对红外测距领域进行了研究。本论文采用单片机作为处理器,编写A/D转换程序及LCD显示程序,红外传感器作为工作模块,完成一套高精度显示、实时测量的红外测距系统。本系统结构简单、体积小、测量精度高、成本低、方便使用。 本论文所介绍的是一种基于STM32单片机并运用日本夏普公司型号为GP2Y0A21的红外传感器所设计的红外测距系统。首先,介绍红外线及红外传感器的分类及应用、STM32单片机的简介与功能;其次,阐述红外测距系统工作原理及基本结构并对单片机、红外传感器、LCD液晶显示屏的工作电路做了介绍;再次,对系统进行了整体设计构想,先后对系统硬件及软件进行设计,并对整个系统的功能进行了调试。最后对整个设计进行总结,说明红外测距系统实现的可行性。 关键词红外测距;单片机;A/D转换;LCD
STM32-based infrared ranging system design Abstract With the development of modern science and technology, there are many new areas, in order to achieve the object close range, high-precision wireless measurement,this topic of infrared ranging is studied. This topic using SCM as the processor, to write A/D converter and LCD display program, an infrared sensor as a working module, complete set of precision display, real-time measurement of infrared ranging system. This system has the advantages of simple structure, small size and high accuracy, low cost and convenient use. This paper introduced is based STM32 microcontroller and use of Japan's Sharp Corporation model GP2Y0A21 infrared sensor designed infrared ranging system. Firstly, introduce the classification and application of infrared distance measurement,it also introduces the function of STM32 microcontroller. Then illustrate the work theory and basic structure of it and introduce the LCD screen and work circuit. Again, the system has carried on the overall design idea, successively on the system hardware and software design, and probes into the function of the whole system debugging. Finally, summarize the entire design to illustrate the feasibility of infrared distance measurement. Keywords Infrared range, SCM, A/D converter, LCD
集成电路使用常识
集成电路使用常识 费仲兴编译 前言 在多年的半导体器件的推广应用中了解到,很多整机厂的技术人员并不太了解集成电路使用的必要常识,即使是对于我公司的技术人员来说,关于这方面知识的掌握也不够全面,因此有必要把有关这方面的材料编译出来,供大家参考。 本材料主要根据日本东芝公司、三洋公司双极集成电路手册中的有关内容编译而成,有些地方加进了一些个人的理解。一共包含了以下三个方面的内容,一是有关集成电路最大额定值的物理意义以及和产品性能的关系;二是整机设计中功率集成电路的热设计方法;三是集成电路使用中的注意事项。其中最大额定值中的各种使用条件和环境温度的相互关系、关系集成电路功耗等的考虑方法还是值得参考的。 一、最大额定值 1、最大额定值的必要性和意义 根据半导体物理理论,半导体器件中载流子密度和温度成指数关系,因此温度对集成电路性能影响很大。 如果在集成电路内部器件的PN结上施加上足够的电压,载流子就会得到附加的能量,引起雪崩倍增,反向电流迅速增大,这时往往会发生击穿现象。 电流所引起的变化不像电压所引起的变化那样剧烈,但它会使半导体元件的性能缓慢地劣化,逐步地失去功能。此外,流过PN结的电流和施加电压的乘积变为功耗,引起温升,如果温度过高,也会引起热破坏。因此,温度、电压、电流和功耗就成为限制集成电路工作的四大因素。 据于上述理由,集成电路制造厂家往往对施加在集成电路上的电压、电流、功耗和温度规定最大容许值,要求用户遵照执行,这就是通常所说的最大额定值。 究竟什么是最大额定值,日本JIS7030(日本工业标准晶体管试验方法)中是这样定义的: 关于集成电路的最大额定值,JIS中没有明确定义过,但只要把上述定义中的晶体管换成集成电路的话,就成为集成电路最大额定值的定义。 集成电路最大额定值,就是为了保证集成电路的寿命和可靠性不可超越的额定值。这些额定值受结构材料、设计和生产条件等限制,因集成电路的种类不同其数值也不同。如果采用绝对最大额定值的概念,可以作如下表述。 所谓绝对最大额定值,就是在工作中即使瞬间也不能超过的值,如果定有两个以上项目的最大额定值时,其中的任何一个项目也不容许超过。 此外,最大额定值的大小不仅决定于半导体芯片内部的特征,同时还要考虑芯片以外的结构材料,如封装树指、芯片焊料等材料的特征。 超过最大额定值使用时,有时会不回复其特性。此外,应在设计时考虑电压的变化、零件特性的元件误差、环境温度的变化及输入信号的变化等,避免超过最大额定值中的任何一项。 2、电压的最大额定值 集成电路内部有许多PN结,当PN结上施加的电压一高,PN结空间电荷区内形成高电场强度,由于载流子的倍增作用,会引起电子雪崩,如果没有足够大的限流电阻,就会引起PN结的损坏。
红外测距
红外测距系统的基本结构 该系统主要由红外发射电路、红外接收电路、A/D转换电路,AT89C52芯片、键盘接口电路及LCD显示电路等组成。其组成框图如图所示 红外测距系统工作流程 在整个红外测距系统工作中,当系统被接入启动电源后,首先,对STM32单片机进行初始化,当单片机接收到红外传感器 GP2Y0A21传输的模拟电压信号后,经过A/D转换电路,将输入单片机的模拟电压信号Vout转换为单片机可识别的数字信号,并经过电压距离转换程序,转换出要测量的距离,然后通过10次均值滤波来提高测量的精确度,最后在通过液晶显示屏LCD显示出测量结果。 为了实现红外测距,在硬件设计中,我们可以使红外发射驱动电路驱动发射头的红外二极管发出红外光,当红外光由红外接收驱动电路驱动红外接收头的光敏二极管接收到,并通过电压转换,将其转换为可测量的电压值,因为红外光的强度会随距离的缩小而增强,红外接收电路转化的电压值会随之增强。又因为电压与距离成比例,通过对转换的电压的计算,我们可以知道红外发射模块与接收模块的距离。我们采用LCD 显示屏动态显示变化中的距离, LCD显示器与AT89C52芯片的P0口与P2.0-2.2接口相接,在红外接收模块运动过程,AT89C52芯片内部会将电压模拟量通过A/D转换将其转化为可显示的数字量,然后通过LCD显示器显示出。通过键盘接口可以实现距离的测量与面积的计算。
系统硬件结构电路图 红外测距的硬件设计红外收发模块 红外发送管是用于发送信号,经过障碍物将信号反射,红外接收管接收到反射回来的信号,然后根据信号强弱将对应的电压值显示在显示模块上,并将此时的距离记录下来。然后整改程序,用红外收发模块进行测距,就可在显示模块上显示出红外接收管接收的 信号强度对应的距离值。 如图所示GP2Y0A02YK0F有3个端口,其中VCC接信号输入,VO接MCP3001的IN+,GND接地线。GP2Y0A02YK0F测量范围在20cm-150cm之间,测量误差小于0.5cm。是一个距离测量传感器单元,PSD的集成组合构成(位置敏感探测器),IRED(红外发光二极管)和信号原理电路。由于采用三角测量方法,各种物体的反射率,对环境 温度和工作时间距离检测不容易产生影响。 复位系统 单片机复位系统就是让程序计数器回到0000h这个地址,程序重头开始执行,将一些 寄存器、存储单元都置为初始设定值,单片机复位的形式有很多种,比如上电复位、 看门狗复位、手动复位等等。本开发板运用的是外接电路来手动复位,如图8所示,STM32单片机采用低电平复位,使复位开关RESET按下单片机接入低电平即完成复位操作。 A/D转换模块 A/D 转换器按照转换的原理可分为直接A/D 转换器和间接A/D 转换器两种类型。直接A/D 转换器,就是把模拟信号直接转换成数字信号,比如逐次逼近型。间接A/D 转换