最新第一章习题答案
第一章练习题及答案

第一章领悟人生真谛把握人生方一、名词解释:1、人生观:就是人们关于人生目的、人生态度、人生价值等问题的根本看法。
2、人生目的:是人们在社会实践中关于自身行为的根本指向和人生追求。
3、人生态度:是指人们通过生活实践形成的对人生问题的一种稳定的心理倾向和精神状态。
4、人生价值:是指人的生命及其实践活动对于社会和个人所具有的作用和意义。
5、荣辱观是人们对荣辱问题的根本看法和态度,是一定社会思想道德原则和规范的体现和表达。
6、世界观:是人们对生活在其中的世界及人与世界的关系的总体看法和根本观点。
二、填空题1、错误的人生观包括、享乐主义、答案:拜金主义极端个人主义3、人生价值包含答案:自我价值社会价值4、人生价值实现条件包括条件、条件和不断增强实现人生价值的能力和本领。
答案:社会客观个体自身5、和的思想以其科学而高尚的品质, 代表了人类社会迄今最先进的人生追求O 答案:服务人民奉献社会6、人生观是由人生目的、、组成。
答案:人生态度人生价值8、只有善于利用顺境,勇于和人生价值才能够实现。
答案:正视逆境战胜逆境9、大学生要牢固树立生命可贵的意识,倍加爱护和的生命,理性面对生老病死的自然规律,努力使自己的生命绽放人生应有的光彩。
答案:自己他人10、大学生在成长过程中,要准确把握苦与乐的辩证关系,努力做、的开拓者。
答案:迎难而上艰苦奋斗11、幸福都是奋斗出来的。
“奋斗本身就是一种幸福。
只有奋斗的人生才称得上幸福的人生。
”奋斗者是精神最为富足的人,也是、的人。
答案:最懂得幸福最享受幸福12、思考人生,树立正确的人生观,首先需要对有科学的认识。
答案:人和人的本质13、对人的认识,核心在于认识o答案:人的本质14、任何人都是处在一定的中从事的人。
答案:社会关系社会实践活动15、问题是认识和处理人生问题的重要着眼点和出发点。
答案:个人与社会的关系16、个人与社会的关系问题,最根本的是与的关系。
答案:个人利益社会利益17、马克思主义站在探索人类自由解放的道路,坚持的价值最求,以实现为价值导向。
第一章 习题答案
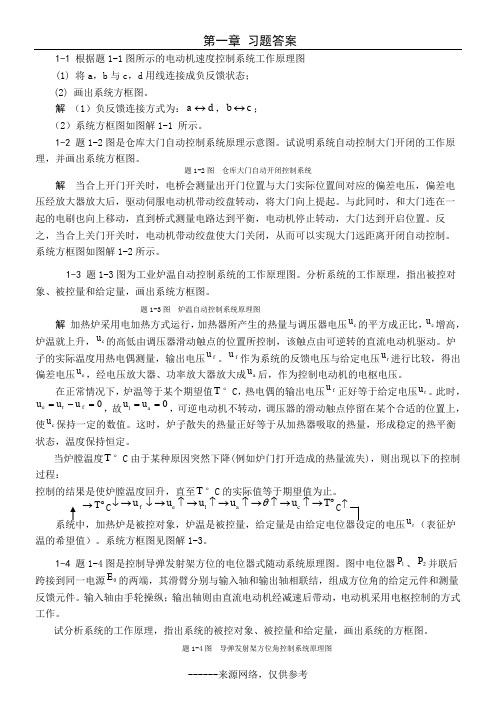
第一章 习题答案1-1 根据题1-1图所示的电动机速度控制系统工作原理图(1) 将a ,b 与c ,d 用线连接成负反馈状态;(2) 画出系统方框图。
解 (1)负反馈连接方式为:d a ↔,c b ↔;(2)系统方框图如图解1-1 所示。
1-2 题1-2图是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开闭的工作原理,并画出系统方框图。
题1-2图 仓库大门自动开闭控制系统解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电解 c u 增高,偏差电压 r 。
此时,-=r e u u 使c u 过程:系统中,加热炉是被控对象,炉温是被控量,给定量是由给定电位器设定的电压r u (表征炉温的希望值)。
系统方框图见图解1-3。
1-4 题1-4图是控制导弹发射架方位的电位器式随动系统原理图。
图中电位器1P 、2P 并联后跨接到同一电源0E 的两端,其滑臂分别与输入轴和输出轴相联结,组成方位角的给定元件和测量反馈元件。
输入轴由手轮操纵;输出轴则由直流电动机经减速后带动,电动机采用电枢控制的方式工作。
试分析系统的工作原理,指出系统的被控对象、被控量和给定量,画出系统的方框图。
题1-4图 导弹发射架方位角控制系统原理图解 当导弹发射架的方位角与输入轴方位角一致时,系统处于相对静止状态。
当摇动手轮使电位器1P 的滑臂转过一个输入角i θ的瞬间,由于输出轴的转角i o θθ≠,于是出现一个误差角o i e θθθ-=,该误差角通过电位器1P 、2P 转换成偏差电压o i e u u u -=,e u 经放大后驱动电动机转动,在驱动导弹发射架转动的同时,通过输出轴带动电位器2P 的滑臂转过一定的角度o θ,直至i o θθ=时,o i u u =,偏差电压0=e u ,电动机停止转动。
这时,导弹发射架停留在相应的方位角上。
只要o i θθ≠,偏差就会产生调节作用,控制的结果是消除偏差e θ,使输出量o θ严格地跟随输入量i θ的变化而变化。
第一章习题参考答案

第一章自我检测题参考答案一、填空题1.PN结具有单向导电性,正向偏置时导通,反向偏置时截止。
2. 2.U T为温度的电压当量,当温度为室温时,U T≈m v。
26mV。
3. 3.半导体二极管2AP7是半导体材料制成的,2CZ56是半导体材料制成的。
N型锗,N型硅。
二、判断题1.二极管的反向击穿电压大小与温度有关,温度升高反向击穿电压增大。
(×).2. .稳压二极管正常工作时必须反偏,且反偏电流必须大于稳定电流I Z。
(√)三、选择题1. 2CZ型二极管以下说法正确的是(B)A、点接触型,适用于小信号检波;B、面接触型,适用于整流;C、面接触型,适用于小信号检波2. 稳压二极管电路如图Z1.1所示,稳压二极管的稳压值U Z=6.3V,正向导通压降0.7V,则为U O(C)。
A.6.3VB.0.7VC.7VD.14V3.在图Z1.2所示各电路中,已知直流电压U I=3V,电阻,二极管的正向压降为0.7V,求U O=?解:(a)U O=0.7V (b)U O=1.5V (c)U O=4.3V第一章习题参考答案1.1判断题1.当二极管两端正向偏置电压大于死区电压,二极管才能导通。
()2.半导体二极管反向击穿后立即烧毁。
()1.√2.×1.2选择题1.硅二极管正偏时,正偏电压0.7V和正偏电压0.5V时,二极管呈现的电阻值()A、相同;B、不相同;C、无法判断。
2.二极管反偏时,以下说法正确的是()A、在达到反向击穿电压之前通过电流很小,称为反向饱和电流;B、在达到死区电压之前,反向电流很小;C、二极管反偏一定截止,电流很小,与外加反偏电压大小无关。
3.图P1.1所示电路,二极管导通时压降为0.7V,反偏时电阻为∞,则以下说法正确的是( C )。
A、VD导通,U AO=5.3V;B、VD导通,U AO=—5.3V;C、VD导通,U AO=—6V;D、VD导通,U AO=6V;E、VD截止,U AO=—9V。
最新综合素质第一章单元练习题及答案

《综合素质》第一章职业理念部分元练习题一、单项选择题1.,从教育角度来说,儿童绘画的真谛是( )。
A.内心的表现B.直观的表现C.创造性的表现D.创造性自我表现D【解析】从教育的角度来说,儿童绘画的真谛是创造性自我表现,创造性自我表现的主轴是积极主动表达欲望和求新求异的能动表现的动态结合,这需要教师不断地对幼儿进行引导性启发。
2.能对幼儿实施高素质的教育,促进幼儿活泼、主动地发展,关键在于()。
A.幼儿园的条件B.教师的素质C.园长的领导D.良好的课程资源B【解析】教师素质的提高是对幼儿实施高素质教育的关键。
3.选择教育内容的依据是()。
A.教材顺序B.教学计划的安排C.幼儿园的要求D.幼儿的兴趣与水平D【解析】幼儿园教育内容的选择依据是幼儿的兴趣和水平。
4.幼儿园课程以()为基础。
A.教师讲授B.幼儿自学C.幼儿的间接经验D.幼儿的直接经验.D【解析】根据幼儿的身心发展水平,他们主要是通过感官来认识环境中的事物,即用眼睛看到物体外形、耳朵听到声音、舌头尝到味道、鼻子嗅到气味、皮肤感到温度和质地等,而且他们的思维方式也主要是具体形象思维。
幼儿只有通过感官确切地接触到事物,并操作它们,才会比较容易地真正达到理解。
所以,幼儿园课程以幼儿的直接经验为主。
5.()是我国一贯的教育方针。
A.重点发展B.全面发展C.局部发展D.智力发展B【解析】我国一贯坚持全面发展的教育方针。
6.幼儿教育发展的规模和速度取决于( )。
A.经济发展水平B.社会政治制度C.社会文化水平D.环境因素A【解析】经济发展状况制约教育的发展。
7.《幼儿园教育指导纲要(试行)》是( )颁布的。
A. 19 96年7月B.1996年9月C.2001年7月D.2001年9月C【解析】2001年7月颁布了《幼儿园教育指导纲要(试行)>。
8.我国现代著名教育思想家陶行知认为幼儿教育应解放儿童的( )。
A.主动性B.活动C.兴趣D.创造力D【解析】陶行知认为教育要启发、解放幼儿的创造力。
第一章课后习题答案

第一章课后习题答案1、5个女生,7个男生进行排列,(a) 若女生在一起有多少种不同的排列?(b) 女生两两不相邻有多少种不同的排列?(c) 两男生A和B之间正好有3个女生的排列是多少?解:(a) 若女生在一起,可将5个女生看作一个整体参与排列,有8!种方式,然后5个女生再进行排列,有5!种方式,根据乘法法则,共有8!5!种方式。
(b) 若女生两两不相邻,可将7个男生进行排列,有7!种方式,考虑到两个男生之间的6个位置和两头的2个位置,每个位置安排一个女生均符合题意,故从中选出5个位置,然后5个女生再进行排列,按顺序安排到这5个位置,有C(8, 5)5!种方式,根据乘法法则,共有7!C(8, 5)5!=7!P(8, 5)种方式。
(c) 若两男生A和B之间正好有3个女生,可以按照顺序操作如下:首先将女生分为两组,一组3人,一组2人,有C(5, 3)种方式;将男生A和B看作一个整体,加上其他5个男生,2人一组的女生进行排列,有8!种方式;将3人一组的女生安排到男生A和B之间进行排列,有3!种方式;男生A和B进行排列,有2!种方式。
根据乘法法则,所求的排列方式为8!C(5, 3)3!2!=8!P(5, 3)2!2、求3000到8000之间的奇整数的数目,而且没有相同的数字。
解:设介于3000到8000之间的奇整数表示为abcd,则a∈{3, 4, 5, 6, 7}, d∈{1, 3, 5, 7, 9},对a进行分类如下:(1) 若a∈{3, 5, 7},则d有4种选取方式,bc有P(8, 2)种方式,根据乘法法则,此类数字有3⨯4⨯P(8, 2)=672个(2) 若a∈{4, 6},则d有5种选取方式,bc仍有P(8, 2)种方式,根据乘法法则,此类数字有2⨯5⨯P(8, 2)=560个根据加法法则,3000到8000之间数字不同的奇整数的数目为672+560=1232个3、证明nC(n-1, r)=(r+1)C(n, r+1),并给出组合解释。
第一章习题答案

第一章绪论(一)填空1.在现代化装配自动生产线上,能高效率地实现装配是因为制成的同一规格的零件或部件具有互换性。
2.制成同一规格的零件或部件不需作任何挑选、调整或辅助加工就能进行装配,并能满足机器的使用性能要求的特性,称为安全互换性。
3.互换性按其互换程度的不同可分为完全互换和不完全互换两种。
其中完全互换在生产中得到广泛应用。
它们的不同之处在于不完全互换在装配时允许挑选、分组等辅助处理。
4.优先数系中任何一数值均称为优先数。
优先数系的基本系列用符号R5 、R10 、R20 和R40 表示,各系列的公比分别为 1.6 、1.25、 1.12 和 1.06 。
5.制造技术水平提高,可以减小尺寸误差,但永远不可能消除尺寸误差。
6.规定公差的原则是在保证满足产品使用性能要求前提下,给出尽可能大的公差。
7.合理地确定公差,正确地进行检测是实现互换性生产的两个必不可少的条件。
8.我国的标准按颁发的级别分为国家标准、部颁标准和企业标准。
(二)判断(正确的打√,错误的打×)1.具有互换性的零件,其几何参数必须制成绝对精确。
( ×)2.在确定产品的参数或参数系列时,应最大限度地采用优先数和优先数系。
(√) 3.优先数是由一些十进制的等差数列构成的。
( ×)4.为使零件的几何参数具有互换性,必须把零件的加工误差控制在给定的范围内。
( √)5.不完全互换性是指一批零件中,一部分零件具有互换性,而另一部分零件必须经过修配才有互换性。
( ×)6.只要零件不经挑选或修配,便能装配到机器上去,则该零件具有互换性。
(×) 7.机器制造业中的互换性生产必定是大量或成批生产,但大量或成批生产不一定是互换性生产,小批量生产一定不是互换性生产。
( ×)8.为了实现互换性,零件的公差规定得越小越好。
( ×)9.凡是合格的零件一定具有互换性。
( ×)10.凡是具有互换性的零件必为合格品。
第一章 习题与答案
第一章习题与答案一、单选题1、理想与空想的区别在于()。
①是否具有主观能动性②是否是自然形成的③是否符合客观规律性④是否是创新思维的结果3、人的理想确立的关键时期是()。
①中年②童年③老年④青年4、追求崇高的理想需要()信念。
①基本的②坚定的③彻底的④一贯的7. 人们的世界观、人生观和价值观在奋斗目标上的集中体现是()①理想②信念③成才目标④道德品质8. 大学生中的共产党员和先进分子应树立的远大理想()① 共产主义的远大理想② 建设中国特色社会主义社会③实现中华民族的伟大复兴④ 提高中国的国际地位9 、现阶段我国各族人民的共同理想是()①实现各尽所能按需分配的共产主义社会。
②建设中国特色社会主义,实现中华民族伟大复兴。
③实现按劳分配的社会主义社会。
④人民生活达到温饱水平。
10 、一个人如果没有崇高理想或者缺乏理想,就会像一艘没有舵的船,随波逐流,难以顺利到达彼岸。
这主要说明了理想是()①人生的指路明灯②人们的主观意志和想当然③人们对未来缺乏客观根据的想象④ 人们对某种思想理论所抱的坚定不移的观念和真诚信服的态度11.“樱桃好吃树难栽,不下功夫花不开。
”理想是美好的,令人向往的,但理想不能自动实现。
把理想变为现实的根本途径是()①勇于实践、艰苦奋斗②认真学习科学理论③逐步确立坚定信念④大胆畅想美好未来13、当教师,要当一个模范教师;当科学家,要当一个对国家有突出贡献的科学家;当解放军战士,要当一个最英勇的解放军战士;当工人,要当一个新时代的劳动模范;当农民,要当一个对改变农村面貌有贡献的农民。
这些都是人生理想中()①生活理想的表现②社会理想的表现③道德理想的表现④职业理想的表现二、多选题1、理想的特征有①超前性②阶级性③科学性④主观性⑤时代性2、理想从对象上划分()。
①个人理想②道德理想③生活理想④ 社会理想⑤长远理想4、对于理想的错误认识有()。
①理想理想,有利就想②人的理想和信念是人生的精神支柱③没有理想的人一样生活的很开心④理想是明天的,只要今天过的好就可以了⑤凡是理想自然都可以实现5、无数事实证明,人有了明确的理想,才能在人生的追求上不断去攀登,最大限度地实现人生价值;人若没有明确的理想,就会像没有舵的小船,在生活的大海中迷失方向,甚至搁浅触礁。
张宇1000题(最新版)第一章习题详解

1 2 2 − a x + (1 − b ) x + o ( x ) 2 = lim =0 x →0 x2 1 − a = 0 ,1 − b = 0 . 2
3
21. 【答案】 (B)
x2 2 ⋅x (1 − cos x ) ln (1 + x ) 1 x4 2 = lim = lim =0, 【解】由 lim x →0 x → 0 x n +1 x sin x n 2 x →0 x n +1
n
n
−3
36. 【答案】1
1 x →0 x 1 37. 【答案】 2
【解】 lim +
x →0
tan x
= e x→0
lim tan x⋅ln
+
1 x
=e
−
1 sin x⋅ln x lim 2 x→0+ cos x
=e
−
1 lim x⋅ln x 2 x→0+
−
=e
1 ln x lim 2 x→0+ 1 x
3
x
x3 + o x3 3
( )
xn
=C ≠0
. 19. 【答案】 (B) 【解】 x − sin x 20. 【答案】 (A)
1 3 x . 6
【解】 lim
x →0
e − ( ax + bx + 1)
x 2
x2
= lim
x →0
1+ x +
x2 + o ( x 2 ) − ( ax 2 + bx + 1) 2 x2
x2 ⋅x 2 5 = lim 5 6 = . x →0 x x 4 + 5 6
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
习 题1-1 一物体放在水平台面上,当台面沿竖直方向作频率为5Hz 的简谐振动时,要使物体不跳离台面,试问对台面的振幅有何限制? 解:物体做简谐运动,设系统运动方程为:)sin()(ϕω+=t a t u对物体分离作受力分析: Fs mg t um -=)( 要使物体不条离台面,要求0≥Fs ,即: mg t um ≤)( 也就是2max )(ωa t ug =≥ mg ga 0099.022==≤∴1-2其拍频和周期。
解:最大振幅为8最大振幅为21-4 长抗弯刚,题1-4图解:简支梁的等效刚度 m N lEIk e 53107.1448⨯==左图系统等效于弹簧并联:m N k k k e 51106.19⨯=+=系统固有频率为:s rad mk n /701==ω 右图系统等效于弹簧串联:m N k k kk k ee68.32=+=系统固有频率为: s r a d mk n /3.302==ω 1-5 降。
若钢索突然卡住,求钢索内的最大张力。
解:此问题等效于单自由度无阻尼系统的自由振动固有频率s rad mkn /20==ω 初始条件是:s m uu 5.0)0(,0)0(== 则系统的振幅025.0)0()0(222=+=nuu a ω故由振动引起的最大动张力N ka mg T T T 42102⨯=+=+=1-6sn gm k δω==初始条件是:0)0(,)0(u UU s -=-=δ 则系统的振幅222)0()0(nuu a ω +=初相位⎪⎪⎭⎫⎝⎛=00u u artg ωϕ 那么系统的位移响应为)sin()(ϕω+=t a t u 系统首次经过平衡位置,也即0)(=t u ,于是有: ⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛-=-=00u u a r t g g t s ωπδωϕπ 1-7 证明对于临界阻尼或过阻尼,系统从任意初始条件开始运动至多越过平衡位置一次。
证明:1=ε时tn -21t )e a (a u(t)ω+=式中0 tn eω-,而t a 21a +单调,故对任意21,a a ,也即任意初始条件u(t)至多 有一次过平衡位置;1 ε时⎪⎪⎭⎫ ⎝⎛+=+=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---⎪⎭⎫ ⎝⎛---⎪⎭⎫ ⎝⎛-+-2121112112222)(a e a eea ea t u ttttn n n n ωξζωξζωξζωξζ式中012 tn eωξξ⎪⎭⎫ ⎝⎛---,而21212a a et n +-ξω单调,故对任意21,a a ,也即任意初始条件u(t)至多有一次过平衡位置;1-8 自由振动20个循环后,c 及20个循环内阻尼力所耗能量。
解:静平衡时:s k δ=mg m N k /104= 系统固有频率s rad g m k sn /6.31===δω 自由振动20个循环有:4ln 10161064ln A A ln 2033201=⨯⨯==--δ 此时0729.0=δ又πξδ2=,ξωn m c 2=则s m N m c n ⋅=⨯⨯==97.714.3/0792.06.3110/πδω 20个循环内阻尼力所耗能量 J kA kA k 192.021212221=-=∆1-9 在零初始条件下被简谐力()52.5sin(1030)N f t t =-激发的响应。
解:系统的运动方程为:()()()mu t ku t f t ωϕ+=-初始条件是:0)0(,0)0(==uu 令方程特解为:)sin()(ϕω-=*t B t u d 其中)()(2220ωωc m k f B d +-=由零初始条件知齐次方程解为零 系统的激发响应为:)3010sin(01.0)3010sin(105.1770005.52)sin()(00220-=-⨯-=--=*t t t m k f t u ϕωω1-10(1)(2) (3)解:s rad m k n /3010090000===ω 4.030100224002=⨯⨯==ωξm c(1) 当ωω=n 时301025.13010004.290-⨯=⨯⨯==ωc f B d (m) n ωωλ=(2) 振幅最大时激振频率s r a d n /7.244.021302122=⨯-⨯=-=ξωω(3) 振幅最大时激振频率221ξωω-=n{}2022222222012)2()()()(max ξξωξωωωωωω-=+-=+-=B B c m k f B n n n d{}2222222222264.0)1(36.14.014.02)4.02()1(12)2()1(max λλλλξξξλλ+-=-⨯⨯⨯+-=-+-=d d B B 其中nωωλ=1-11 一质量为m 的单自由度系统,经试验测出其阻尼自由振动频率为d ω,在简谐激振力作用下位移共振的激振频率为ω。
求系统的固有频率、阻尼系数和振幅对数衰减率。
解:位移共振时221ξωω-=n又21ξωω-=n d 那么n ω=阻尼比22222ωωω-==d n m m c1-12 时0由上式有固有频率mk n 3=ω 阻尼比mk c32=ξ静力幅klfB 30=又稳态振动振幅22222)2()(ωξωωωωn nn d B B +-=当n ωω=时质量m 的线位移幅值:k mc f l B lB l B u nn n n n d 42)2()(02222202==+-==ωξωωωξωωωω当2/n ωω=时质量m 的线位移幅值:22222024814)2()(cmk mf lB l B u n nn d +=+-==ωξωωωω1-13 一电机质量为kg 22,转速为3000转/分,通过4个同样的弹簧对称地支承在基础上。
欲使传到基础上的力为偏心质量惯性力的10%,求每个弹簧的刚度系数。
解:系统运动微分方程为:2()()s i n M u t k ut m e tωω+= 由上式可得系统的稳定振型为:)sin()(t B t u d ω=*其中22ωωM k me B d -=又21.0ωme kB d =则m N M k /1097.11160230002211522⨯=⎪⎭⎫ ⎝⎛⨯⨯==πω每个弹簧的刚度系数m N k k /1093.44/4'⨯==1-14 发动机的工作转速为1500~2000 转/分,要隔离发动机引起的电子设备90%以上的振动,若不计阻尼,求隔振器在设备自重下的静变形s δ。
解:隔振系统的固有频率sn gm k δω==系统绝对运动传递率1111222-=-=nd T ωωλ 由以上两式⎪⎪⎭⎫⎝⎛+=d s T g 112ωδ 又60220006021500πωπ⨯≤≤⨯,即4.2091.157≤≤ω 可得0.00250.0044s δ≤≤1-15 为测量频率为Hz 5的简谐运动,分别设计位移传感器和加速度传感器,并要求其误差不超过10%。
若取0.707ζ=,问对传感器的固有频率有何限制?解:由题意知加速度传感器测得的振幅应为实际的90%,即 ()()10090211222=+-=ξλλβd 解得:0.69λ=则要求()57.250.69n HZ ωωλ=== 位移传感器测得的振幅应为实际的90%,即 ()()10090212222=+-=ξλλλβd 解得: 1.43λ=则()5 3.51.43n HZ ωωλ===题1-16图1-16 单自由度无阻尼系统受图示力激励,求系统在初始条件0)0(u u =、0)0(u u =下的响应。
解:系统的运动微分方程及初始条件为()()()mu t ku t f t +=00)0(,)0(u uu u == 000110 () 0 t t f t f t t t t t <⎧⎪=<<⎨⎪<⎩单位脉冲响应函数为1()sin , 0n nh t t t m ωω=> 由Duhamel 积分,求得系统响应函数 (1) 当1t t <时,系统的响应为自由响应 001()cos sin , 0n n nu u t u t t t t ωωω=+<<(2) 当12t t t <<时,系统的响应为1100000001()cos sin 0sin ()cos sin [1cos ()]t t n n n n n t n n n n u f u u t u t t d t d u t tm f t t kωωτωττωωωωωω=+++-=++--⎰⎰(3) 当2t t >时,系统的响应为121200000()cos sin 0sin ()0cos sin t t t n n n t t n nn n nu f u t u t t d t d d m u u t t ωωτωτττωωωωω=+++-+=+⎰⎰⎰1-17()()()mu t k u v c u v =----()()()u t u t v t =-,则有0r r r 初始条件为00)0(,)0(u uu u == 零初始条件下,由Duhamel 积分得:()()*00021()sin ()sin () 1)n nn ttt t r d d d dtd n a u t mae t d e t d m a t ζωτζωτζωωττωττωωωϕω-----=--=--⎡⎤-=-⎢⎥⎢⎥⎣⎦⎰⎰初始条件引起的响应为:000()cos sin n t n r d d d u u u t e u t t ζωζωωωω-⎛⎫+=+ ⎪⎝⎭则系统的相对响应位移为:*()()()r r r u t u t u t =+1-18 单自由度无阻尼系统的初始条件为零,求其在图示外力作用下的响应。
题1-18图解:系统的运动微分方程及初始条件为()()()m u t k u tf t+= 0)0(,0)0(==uu激励的表达式为:0102122120()() 0 f t t ff t t t t t t t t t t ⎧≤≤⎪⎪=-+<<⎨-⎪⎪≥⎩由Duhamel 积分,求得系统响应函数 (2) 当1t t <时,系统的响应为0001()s i n ()(1c o s )tnn n f u t f t d t m kωττωω=-=-⎰(2) 当12t t t <<时,系统的响应为110020210121121212111()sin ()()sin ()11cos ()sin ()cos ()()t tn n t n n n n n nn n f u t f t d t t d m m t t f t t t t t t t t k t t t t t t ωτττωττωωωωωωωω=-+-+--⎡⎤--=-+--+⎢⎥---⎣⎦⎰⎰(3) 当2t t >时,系统的响应为()1210020*********()sin ()()sin ()01sin ()sin ()cos ()t t n n t n n n n n n f u t f t d t t d m m t t f t t t t t k t t ωτττωττωωωωωω=-+-+-+-⎡⎤=----⎢⎥-⎣⎦⎰⎰。