测控仪器 第3章——第3节
测控电路李醒飞第五版第三章习题答案内容
幅信号一般形式
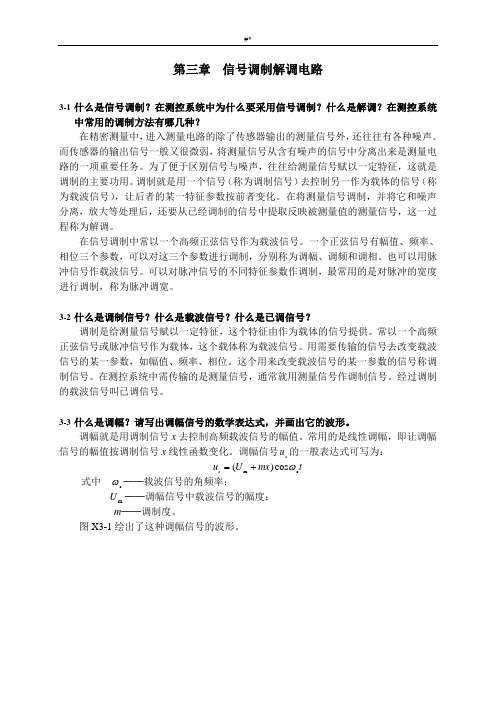
双边带调幅信号
单边带调幅信号
图X3-10双边带调幅信号
3-14在测控系统中被测信号的变化频率为0~100Hz,应当怎样选取载波信号的
频率?应当怎样选取调幅信号放大器的通频带?信号解调后,怎样选取滤波器的通频带?
为了正确进行信号调制必须要求ωc>>Ω,通常至少要求ωc>10Ω。在这种情况下,解调时滤波器能较好地将调制信号与载波信号分开,检出调制信号。若被测信号的变化频率为0~100Hz,应要求载波信号的频率ωc>1000 Hz。调幅信号放大器的通频带应为900~1100 Hz。信号解调后,滤波器的通频带应>100 Hz,即让0~100Hz的信号顺利通过,而将900 Hz以上的信号抑制,可选通频带为200 Hz。
3-12什么是双边带调幅?请写出其数学表达式,画出它的波形。
可以假设调制信号x为角频率为Ω的余弦信号x=XmcosΩt,当调制信号x不符合余弦规律时,可以将它分解为一些不同频率的余弦信号之和。在信号调制中必须要求载波信号的频率远高于调制信号的变化频率。调幅信号可写为:
它包含三个不同频率的信号:角频率为 的载波信号Umcosωct和角频率分别为ωc±Ω的上下边频信号。载波信号中不含调制信号,即不含被测量x的信息,因此可以取Um=0,即只保留两个边频信号。这种调制称为双边带调制,对于双边带调制。
在信号调制中常以一个高频正弦信号作为载波信号。一个正弦信号有幅值、频率、相位三个参数,可以对这三个参数进行调制,分别称为调幅、调频和调相。也可以用脉冲信号作载波信号。可以对脉冲信号的不同特征参数作调制,最常用的是对脉冲的宽度进行调制,称为脉冲调宽。
3-2什么是调制信号?什么是载理
a)调幅信号b)半波检波后的信号
《测控基础物位》PPT课件

抽油井井下液面探测(续)
采用上述方法测量时,井下必须下有回音标,具有代 表性的回声仪JH一711以及JH一731和BH一73型回声仪都是采 用上述方法测量的,并曾得到广泛应用。有时油井只为测试 井下液面而装设回音标是很麻烦的,而有些井不适于装回音 标或不能装回音标 (如作偏心井口测试时)。所以上述测量 方法在实际测量时有其局限性。
H 1 vt 2
超声波物位计(续)
因为校正探头和测量探头是在同一个介质中,如果两者的
传播速度相等,即v0=v,则液位高度为:
H
L0 t0
t
选择适当的时间单位,使t0在数值上等于L0,则t在数值上 就
等于被测液位的高度H。这样便将液位的测量变为测量声脉
冲的传播时间,因此,用校正探头可以在一定程度上消除声
H 1 vt 2
抽油井井下液面探测(续)
在实际测量中,由于油井 内气相介质的组成,温度随深 度不同而不同,所以很难精确 地求出反映气体穿越整个气相 介质时的平均声速。因而在实 际应用时,经常采用固定距离 标的方法进行测量的。
回声法测量液位示意图
抽油井井下液面探测(续)
测量前,在油井下油管时,先在 油管接箍上装上一种“回音标”,随 油管下入井下一定深度处,以便确定 声波在井筒中传播的平均速度。
特性与方向有关,因此需在晶体内部 选定参考方向,这个方向叫晶体轴。
0
y
X轴是平行于相邻棱柱面内夹角的等分线, 垂直于X轴的棱面上压电效应最强
x
在电场作用下,沿Y轴方向的机械变形最
明显
Z轴方向无压电效应,称中性轴。
超声波物位计(续)
2、压电材料(铁电性物质):
① 天然石英晶体,价格昂贵,压电系数小。 ② 压电陶瓷:用作压电陶瓷的铁电体都是将钙钛矿中多种 成分混和后,经粉碎、成型、1000度以上高温烧结而成多晶 铁电体,材料内部有小“电畴”,是压电特性的基础,它在 20-30KV/cm的强化电场中放2-3小时,极性转到接近电场方 向,叫“人工极化”工艺
测控仪器知识点总结

测控仪器知识点总结第⼀章测控仪器设计概论1. 从计量测试⾓度可将仪器分为计量测试仪器、计算仪器、控制仪器及控制装置。
2. 计算仪器是以信息数据处理和运算为主的仪器。
3. 测控仪器是利⽤测量与控制的原理,采⽤机、电、光各种计量测试原理及控制系统与计算机结合的⼀种范围⼴泛的测量仪器。
4. 仪器中与被测量相⽐较的标准量以及与其对应的装置⼀起,称为仪器的基准部件。
5. 测控仪器中的传感器是仪器的感受转换部件,它的作⽤是感受被测量,拾取原始信号并将它转换为易于放⼤或处理的信号。
6. 测量范围:测量仪器误差允许范围内的被测量值。
7. 灵敏度:测量仪器响应(输出)的变化除以对应的激励(输⼊)的变化。
8. 测控的分辨⼒是指显⽰装置的能有效辨别的最⼩⽰值。
9. 测量仪器的准确度是指测量仪器输出接近真值的响应能⼒。
10. 测量仪器的⽰值误差是指测量仪器的⽰值与对应输⼊量的真值之差。
⽰值误差越⼩,仪器的准确度越⾼。
11. 测量仪器的重复性:在相同测量条件下,重复测量同⼀个被测量,仪器提供相近⽰值的能⼒。
重复性误差越⼩,则仪器的随机误差越⼩。
第⼆章仪器精度理论12. 估读误差:观测者估读指⽰器位于两相邻标尺标记间的相对位置⽽引起的误差,有时也称为内插误差。
13. 读数误差:由于观测者对计量器具⽰值读数不准确所引起的误差,它包括视差和估读误差。
14. 绝对误差:被测量测得值与其真值(或相对真值)之差。
15. 相对误差:绝对误差与被测量真值的⽐值。
16. 正确度:它是系统误差⼤⼩的反映,表征测量结果稳定地接近真值的程度。
17. 精密度:它是随机误差⼤⼩的反映,表征测量结果的⼀致性或误差的分散性。
18. 准确度:它是系统误差和随机误差两者的综合的反映。
表征测量结果与真值之间的⼀致程度。
19. 螺旋测微机构的误差分析。
如图所⽰,由于制造或装配的不完善,使得螺旋测微机构的轴线与滑块运动⽅向成⼀夹⾓θ,求由此引起的滑块位置误差 L 。
虚拟仪器第3章-构建程序框图要点
些部分能划分为一个逻辑上的单元,就创建一个子VI。 整齐清晰的排列连线,以免造成读程序的困难。 按住<Ctrl>键用选择工具在程序框图中划出一块面积,
可以解决部分程序框图过于拥挤的问题。 为了节省程序框图空间,不必为函数和子VI显示标签,
包括算术运算符、数值类型转换函数、三角函数、对数函数、 数值 复数函数、数值常数、数据操作函数、与信号调理有关的量值
转换VI等。
文件I/O
包括对各种格式文件读写的函数和VI,对文件及路径进行操作 的各种函数和VI。
布尔 包括逻辑运算符、布尔型常数、布尔量与数值的转换函数等。
3-2 函数选板
图标
名称 字符串
第3章 构建程序框图
程序框图里的对象 函数选板 基本数据类型 程序的层次结构 Express VI 多态 程序框图设计原则 修复程序创建中的错误 程序调试
唐山学院测控中心 (C) 2008
3-1 程序框图里的对象
3-1-1 节点 3-1-2 接线端 3-1-3 常量 3-1-4 连线
3-1-1 节点
函数 函数是完成LabVIEW程序功能的最基本成员,它相当于文
本编程语言对较少。
子VI 用于另一个VI中的VI叫子VI,这实际就是供其它程序调用
的子程序。
Express VI Express VI是一类特殊子VI,可以通过对话框配
。
3-4 程序的层次结构
3-4-1 层次结构窗口
帮助我们了解软件 层次结构的一个图形工 具是LabVIEW的层次结 构窗口,层次结构窗口 通过显示VI的调用与被 调用来表达VI的从属关 系。
大学十三年级测控技术与仪器教案分享

大学十三年级测控技术与仪器教案分享测控技术与仪器是现代工程领域中不可或缺的重要学科。
为了帮助学生更好地理解和掌握相关知识,提高实践操作能力,我们设计了一份测控技术与仪器教案。
本文将分享这份教案的内容和实施方法,旨在促进学生对测控技术与仪器的学习兴趣和实践能力的提升。
教学目标:1. 理解测控技术与仪器的基本概念和原理;2. 掌握测量数据的采集、处理和分析方法;3. 学习使用常见的测试仪器和设备进行实验操作;4. 培养科学精神和实践能力。
教学内容:1. 第一章:测控技术与仪器概述1.1 测控技术的定义和分类1.2 仪器的基本原理和分类1.3 测量误差的来源和控制方法2. 第二章:数据采集与处理2.1 传感器的原理和应用2.2 信号调理与放大2.3 数据采集系统的组成和工作原理2.4 数据处理算法的基本方法3. 第三章:常见测试仪器介绍与使用3.1 示波器的结构和功能3.2 多用表的使用方法3.3 功率供应器的原理和应用3.4 数字多显示仪的特点和使用技巧4. 第四章:仪器的校准与维护4.1 仪器校准的原因和方法4.2 仪器维护的基本知识4.3 实验室安全与仪器使用注意事项教学方法:1. 理论讲解:通过课堂教学、幻灯片展示等形式,讲解测控技术与仪器的概念、原理和应用。
2. 实践操作:安排实验课程,让学生亲自操作常见的测试仪器,采集实验数据,并进行分析和处理。
3. 讨论互动:组织小组讨论和案例分析,促进学生之间的交流与合作,加深对测控技术与仪器理论的理解,并提高问题解决能力。
4. 实验报告:要求学生撰写实验报告,详细记录实验步骤、数据分析和结论,培养学生的实践操作和科学写作能力。
评估方法:1. 平时成绩:考察学生的出勤情况、实验操作技能和课堂表现。
2. 实验报告评分:对学生的实验报告进行评估,包括实验设计、数据处理和结论等方面。
3. 期末考试:考核学生对测控技术与仪器的理论知识和实践应用能力。
教学资源:1. 教材:选用相关教材,结合课程内容进行讲解和学习。
测控仪器设计第2章——第3节

迈克尔逊等倾干涉条纹
等倾干涉
24
迈克尔逊干涉仪产生的等倾干涉条纹及M1和M2的相应位置
迈克尔逊等倾干涉条纹
25
迈克耳逊-莫雷实 验测到以太漂移速度 为零,对以太理论是 一个沉重的打击,被 人们称为是笼罩在19 世纪物理学上空的一 朵乌云。
26
对此实验结果,洛仑兹提出了一个假设, 认为一切在以太中运动的物体都要沿运动方向 收缩。由此他证明了,即使地球相对以太有运 动,迈克尔逊也不可能发现它。而爱因斯坦从
优点:简单、快速。
局限性:
(1)首先要能够正确得到仪器作用方程; (2)对于不能列入仪器作用方程的源误差,不能用微 分法求其对仪器精度产生的影响,例如仪器中经常遇到的测
杆间隙、度盘的安装偏心等,因为此类源误差通常产生于装 配调整环节,与仪器作用方程无关。
7
补充:迈克尔逊干涉仪(Michelson interferometer)
① 以太不存在,光的传播不需任何媒质,可在 真空中传播,以太不能作绝对参照系。 ② 地球上各方向光速相同,与地球运动状态无 关。 迈克尔逊干涉仪由于可进行精密测量, 1907年迈克尔逊获诺贝尔物理学奖。
21
迈克尔逊干涉仪结构
反射镜 M1
M1 M 2
反 射 镜
M1 移动导轨
单 色 光 源 分光板 G1 补偿板 G 2
13
十九世纪中叶,麦克斯韦建立了电磁场理论,并预言 了以光速C传播的电磁波的存在。到十九世纪末,实验完 全证实了麦克斯韦理论。电磁波是什么?它的传播速度C 是对谁而言的呢?当时流行的看法是整个宇宙空间充满一 种特殊物质叫做“以太”,电磁波是以太振动的传播。但 人们发现,这是一个充满矛盾的理论。如果认为地球是在 一个静止的以太中运动,那么根据速度叠加原理,在地球 上沿不同方向传播的光的速度必定不一样,但是实验否定 了这个结论。如果认为以太被地球带着走,又明显与天文 学上的一些观测结果不符。 1887年迈克尔逊和莫雷利用光的干涉现象进行了非常 精确的测量,仍没有发现地球有相对于以太的任何运动。
测控仪器设计(全)PPT课件

✓ 测量范围
• 测量仪器误差允 许范围内的被测 量值。
如光学计的示值范围 为±0.1mm,但其悬臂可 沿立柱调节180mm,在该 范围内仍可保证仪器的测 量精度,则其测量范围为 180±0.1mm。
光学计
✓ 灵敏度
• 测量仪器输出的变化与对应的输入变化的 比值。 s=△y/△x
• 表征仪器对被测量变化的反应能力。 • 当输出值与输入值为同一量纲时,灵敏度
又称为放大比。
第四节 对测控仪器设计的要求和设计程序
一、设计要求
(1)精度要求 精度是测控仪器的生命,精度是第一位的。
精度本身只是一种定性的概念。为表征一台仪器的性能和 达到的水平,应有一些精度指标要求,如静态测量的示值 误差、重复性误差、复现性、稳定性、回程误差、灵敏度、 鉴别力、线性度等,动态测量的稳态响应误差、瞬态响应
2009年9月,Intel总裁兼 CEO Paul Otellini展示世界 上第一块基于22nm工艺的 晶圆。该晶圆上的每个指甲 盖大小的单独硅片内都集成 了多达29亿个晶体管。
↓
努力于2016年实现10nm工 艺。
16
一、精度及其重要性
精度:是误差的反义词,精度的高低是用误差的大小来衡量的。 误差大,精度低;反之,误差小,精度高。
17
二、 精度分析的目的
❖ 仪器误差的客观存在性:决定了仪器的精度无论多高,总存 在误差。
大等
光准直式、显微镜式、投影放大、摄 光学式放大部件 影放大式、莫尔条纹、光干涉等
前置放大、功率放大等 电子放大部件
光电放大部件 光电管放大、倍增管放大等
名称 机械系统
光学系统 电子信息处 理系统 光电系统
6
4.瞄准部件
测控仪器设计第2章——第3节

4
P33
一、误差分析的理论基础:误差独立作用原理 误差分析的理论基础:
P33
除仪器输入以外, 除仪器输入以外,另有影响仪器输出的因素 qi (i = 1,2,L n ) 。假设某一 因素的变动(源误差) 使仪器产生一个附加输出,称为局部误差。 因素的变动(源误差)∆qi 使仪器产生一个附加输出,称为局部误差。
运行误差总结: 运行误差总结:
仪器在使用过程中产生的误差,属于随机误差。始终存在,无法消除。 仪器在使用过程中产生的误差,属于随机误差。始终存在,无法消除。
3
第三节 仪器误差的分析
精度:是误差的反义词。 精度:是误差的反义词。误差大 精度低; 精度低;误差小 精度高 所以,仪器误差分析又称为仪器精度分析
∆Qi = Pi ∆qi
局部误差 影响系数 源误差
∆y = ∑ Pi ∆qi = ∑ ∆Qi
i =1 i =1
n
n
仪器总误差
误差独立作用原理的内容: 误差独立作用原理的内容: ①一个源误差仅使仪器产生一个局部误差。局部误差是源误差的线性函 一个源误差仅使仪器产生一个局部误差。 与其他源误差无关。 数,与其他源误差无关。 ②仪器总误差是局部误差的综合。 仪器总误差是局部误差的综合。 意义: 意义:
具体步骤: 具体步骤: 1. 列出仪器的作用方程; 列出仪器的作用方程;
∆y =
∑
i =1
n
∂y ∆ qi = ∂ qi
∑ P ∆q
i i =1
n
i
=
∑ ∆Q
i =1
n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
36
2.激光两坐标测量仪中监测导轨转 角与平移的光电补偿方法 图3-5为高精度激光两坐标测量 仪,为了补偿由于导轨转角引起的的 阿贝误差,仪器采用双层工作台。下 层工作台2经滚柱在底座1的导轨上 作纵向移动,上工作台3通过三个滚 珠轴承4支承在下工作台上。上工作 台П型框板的左右各有两个孔眼。左 面两个孔眼里装有弹性顶块5,把上 工作台往左拉,右面两个孔眼里装有 压电陶瓷组合体6、7,其端部顶在 下工作台上。利用压电陶瓷的电场压变效应,使上工作台相对于下工作 台实现微小的平移或转角。转角将产 生阿贝误差,故在此仅介绍导轨的转 角运动。
图 3— 1 遵守阿贝原则的测量 1-导轨 2-指示器 3-标准线纹尺
共线。
4-被测件 5-工作台
4
阿贝原则的引出:
游标卡尺的阿贝误差计算:
1 S tan S
(当很小的时候)
5
导轨间隙造成运动中的摆角由于标准刻线尺与被测件 的直径不共线而带来测量误差。
1 S tan S
17
补偿举例
1. 爱彭斯坦(Eppenstein,也叫爱宾斯坦) 光学补偿方法
是一种结构布局,用以补偿阿贝误差。被用于高精度测长 机的读数系统中。
问题是如何产生的?
问题是如何解决的?
18
测长仪和测长机
测长仪和测长机结构中带有长度标尺,通常是线纹 尺,也可以是光栅尺。 测量时,用此尺作为标准尺与被测长度做比较,通 过显微镜读数以得到测量结果。 量程较短的称为测长仪。 量程在500mm以上的仪器体形较大,称为测长机。 测长机常用于绝对测量。
扩展阿贝原则:
美国学者布莱恩(J.B.Bryan)建议将扩展了的阿贝原则表达如下:
“位移测量系统工作点的路程应和被测位移作用点的路程 位于一条直线上。如果这不可能,那么或者必须使传送位移 的导轨没有角运动,或者必须用实际角运动的数据计算偏移
的影响”。
它包含三重意思,遵守了这三条中的一条,即遵守了阿贝原 则。即:
29
30
图3—4 爱彭斯坦光学补偿方法
a)测长机工作原理图
b)光学补偿原理
读数显微镜的细分值为0.001mm
31
问题是如何产生的?
如果导轨平直无变形,测量时尾座移动以后所成的新的双刻
线像O’也会位于S1处而没有误差产生。
现假设由于导轨直线度的影响,使尾座产生倾角θ,则在测 量线方向上,测端因倾斜而向左挪动 L h tan 偿措施,则此值即为阿贝误差。 ,如无补
焦距,则ΔL=S1S2。 头座向左移动压紧工件,使得尾座移动以后所成的新的双 刻线像O’的像再次与S1点瞄准,即可消除因尾座倾斜而带 来的阿贝误差。
33
简单总结问题如下:
1. 爱彭斯坦(Eppenstein)光学补偿方法
问题的产生: L
高精密测长机的理想测量状态
ΔL=h×tanθ
L
h
θ
由于尾座倾斜造成测量误差ΔL
26
如何形成对眼睛瞄准有利的条件
1、两实线瞄准 ±60" 2、两实线端部瞄准±10~20 " 3、双线平分或对称瞄准±5~10" 4、虚线压测件轮廓边缘±20~30" 5、叉线对准单线 ±20~30"
尾座
光线自光源,经聚光镜,滤光片、反射镜后照亮双刻线分划 板; 由于分划板位于物镜组N2的焦平面上,光线通过分划板后, 经反射镜M2和物镜组N2后便形成平行光束; 平行光束经过同样焦距的物镜组N1和反射镜M1后,使双刻线 分划板成像于100mm刻尺上;
2 d d d (1 cos ) d
2
2
设d 被测线纹长度,且d=30mm,φ=1′, 则引起的误差为:Δ=30×(0.0003)2/2=13.5×10-7 mm=1.35nm 即误差微小到可以忽略不计的程度。
可见,阿贝原则在量仪设计中的意义重大。
9
阿贝比长仪:一种精密测量直线距离的仪器﹐简称比长仪。在 天文工作中﹐用于测量底片上谱线间的距离。比长仪的量程 200毫米﹐测量精度可达±1.5微米。 10
1)标尺与被测量共线;
2)如无法做到,则确保导轨没有角运动; 3)如1)、2)无法做如何补偿? 补偿方法包括: ①动态跟踪测量补偿法(动态修正): 将监测系统与仪器主体固定为一体,动态跟踪导轨的偏 移信息并将其补偿掉。
②定点测量补偿法(静态修正):
事先对仪器在某种标准条件下进行定点测量得到误差函 数,实际测量时根据误差函数对读数进行补偿。这种方法的 最大缺点是:仪器某标定点的定标条件与被测件在此标定点 上的被测条件都应完全一样,否则将造成更大的测量误差。
第三节
测控仪器设计原则
在仪器设计长期实践的基础上,形成了一些带有普遍性的、 或在一定场合下带有普遍性的仪器设计所应遵循的基本原则 与基本原理。这些设计原则与原理,作为仪器设计中的技术 措施,在保证和提高仪器精度、改善仪器性能、以及在降低仪
器成本等方面带来了良好的效果。
如何在仪器的总体方案中遵循或恰当地运用这些原则与原 理,是在仪器总体设计阶段应当着重考虑的一个内容。
误差和倾角φ成一次方关系,习惯上称为一 误差和倾角φ成二次方关系,习惯 上称为二次微小误差
结论 阿贝误差
次误差
导轨间隙造成运动中的摆角由于标准刻 导轨间隙造成运动中的摆角由于标 线尺与被测件的直径不共线而带来测量 准刻线尺与被测件的直径共线误差 产生原因 8 微小到可以忽略不计 误差
再举一例: 用阿贝比长仪测量线纹尺的刻线间隔,被测尺寸线W和仪器基准线S 在同一条直线上,故符合阿贝原则。如果由于导轨误差,基准读数显 微镜和测量使读数显微镜支架在图示平面内产生 的转动,使基准读 。此时带来的测量误差为: 数显微镜的第二次瞄准位置由 M 2 移到 M 2
一般的设计情况下应尽量遵守。
但在实际的设计工作中,有些情况不能保 证阿贝原则的实施,其原因通常有二:
1)遵守阿贝原则一般造成仪器外廓尺寸过大,特别是对线 值测量范围大的仪器,情况更为严重。
2)多自由度测量仪器,如图3-3所示的三坐标测量机。很难
作到使各个坐标方向或一个坐标方向上的各个平面内均能遵 守阿贝原则。
23
为什么使用“双刻线”分划板?
减小对准误差,提高对准精度。
24
补充:眼睛的分辨率和瞄准精度
人眼的分辨率是眼睛的重要光学特性,同时也 是目视光学仪器设计的重要依据之一。
眼睛能分辨出两个非常近的点的能力称为眼睛的分 辨率(分辨本领) 眼睛在看物空间两点时,这两点对眼睛物方节点 的张角称为两点间的角距离或称为视角
1
六 项 设 计 原 则
一、阿贝(Abbe)原则及其扩展
二、变形最小原则
三、测量链最短原则 四、坐标系基准统一原则 五、精度匹配原则 六、经济原则
2
一、 阿贝原则
德国著名的物理学家阿 贝〃恩斯特(Abbe Ernst) (1840.1.23~1905.1.14),在 1890年就长度测量问题,提出 了著名的阿贝原则。 阿贝于1861年在耶拿大学 获得博士学位。1863年在耶拿 大学担任数学、物理学和天文学 讲师,1876年任教授。1866年 与C〃蔡司合作研制光学仪器。 这一合作有力地促进了德国光学 工业的发展。阿贝后来还做了蔡 司工厂的负责人。1905年1月 3 14日在耶拿逝世。
13
其测量点的轨迹是 测头1的行程所构成的
尺寸线,而仪器读数线
分别在图示的X、Y与Z 直线位臵处。显然,在
图示情况下测量时,X
与Y坐标方向均不遵守 阿贝原则。
图3-3 三坐标测量机 1-测头的触球 2-被测工件
具体分析见下页。
14
图3-3 a) X向
图3-3 b) Y向
图3-3 a)为XZ平面,测头1在该平面内的行程所构成的尺寸线与Z方向读数线共线, 但与X方向读数线相距为L,在该平面内不符合阿贝原则。 图3-3 b)为YZ平面,测头1在该平面内的行程所构成的尺寸线与Z方向读数线共线, 15 但与Y方向读数线相距为L,在该平面内不符合阿贝原则。
19
20
21
卧式测长机除能 测量外尺寸外, 主要用于测量内 尺寸。
测量范围来分, 有 1、 2、 3、 4、 6m,甚至12m
由内装100mm 线纹标尺的量轴、 细分值为 0.001mm的读 22 数显微镜所组成。
尾座
100mm刻尺上共有刻线1000条,故每格为 0.1mm;
双刻线分划板共有10块,每块相距100mm(总 长1m),在每一块上面刻着两条刻线和0、1、 2、…、9之间的一个数字,分别代表每一块分划 板距刻线尺零刻线的距离的分米数值。
32
问题是如何解决的?
反射镜M2、透镜N2与尾座联为一体,也随之倾斜θ角,这 样,尾座移动以后所成的新的双刻线像O’通过M2、N2及 M1、N1便成像到S2点,则S2点相对于S1 点在100刻尺上位 移量为: s1s 2
f tan
选择参数h=f,h:测量线到刻尺面的距离;f:透镜N1、N2
读数显微镜
测量显微镜
工作台
圆导轨
防转导轨
11
阿贝测长仪
φ
2 d d d (1 cos ) d 2 / 2
图3-2 工件的直径测量 1—被测工件 2—工作台 3—底座 b)用阿贝比较仪测量 4—基准刻线尺 5—支架 12
阿贝原则被公认为是量仪设计中最基本的原则之一,在
34
问题的解决:
ΔL
L
ΔL
通过光学系统将尾座的位移量(ΔL)1:1 成像到头座的刻尺上,通 过位于头座的光学瞄准系统使头座也同方向地移动ΔL ,最终到达消 除误差的目的。
35
由于在仪器中设臵了上述光学系统, 在读数时自动消失了,即达到了补偿的 目的。这种补偿原理被称为爱彭斯坦光 学补偿原理,是一种通过结构布局随机 补偿阿贝误差的方法。