第七讲自适应噪声抵消技术优秀课件
自适应噪声控制技术研究

自适应噪声控制技术研究噪声是人们常常面临的问题。
随着城市化进程的加快、工业化的不断发展以及高速公路网络的不断扩大,噪声污染已成为一种很常见的问题。
长期处于噪声污染环境中,会对人类的身体和心理健康造成极大的影响。
自适应噪声控制技术的出现,为解决噪声污染问题提供了一种有效的途径。
自适应噪声控制技术(Adaptive Noise Control,ANC)是利用数字信号处理技术适应地控制噪声的一种方法。
其最主要目的是通过在噪声源和接收器之间添加一个辅助信号,获得所需下降的噪声。
自适应噪声控制技术优点自适应噪声控制技术具有许多优点,比如能够实时控制、自动适应环境等。
以下为自适应噪声控制技术的一些主要优点:1.具有实时性:自适应噪声控制技术的反馈环路可以实时地从主干路过滤噪声,以进一步抵消噪声。
在处理声音信号时,设备可以快速响应环境变化,从而及时控制噪声。
2.能够实现环境自适应:自适应噪声控制技术可以根据不同的环境自动调整参数。
这意味着无论是在噪声强度、频率或其他特征方面,设备都能够自动应对,并且在任何情况下都能产生理想的效果。
3.不影响传送信息:自适应噪声控制技术可以有效地消除噪声,同时不影响信号本身的传递。
因此,设备不会影响无线电通信、音乐和语音等信号的传输。
4.适合各种环境:自适应噪声控制技术可以将环境中的噪声减少到“不能被感知”的程度。
无论是户外的道路、铁路、飞机或是家庭的电器,这种技术可以在各种环境中发挥出良好的效果。
自适应噪声控制技术应用场景自适应噪声控制技术具有广泛的应用场景,以下为一些主要的应用场景:1.公共交通在人口稠密的城市或交通枢纽中,交通噪声是一个严重的问题。
例如,火车火车站、机场和高速公路等地区的噪声可能会对周边居民造成严重影响。
自适应噪声控制技术可以有效地减少这些噪声,从而改善附近居民的生活质量。
2.家庭电器许多家庭电器会产生噪声,例如空调、冰箱、洗衣机等。
尤其是在家庭娱乐场所,例如音响、电视机等方面,人们在享受视听盛宴的同时,也面临着着极高的噪声污染。
自适应噪声抵消anc方法
自适应噪声抵消anc方法全文共四篇示例,供读者参考第一篇示例:自适应噪声抵消(ANC)是一种广泛应用于消除环境中噪声干扰的技术。
随着科技的不断发展,ANC技术在各个领域得到了广泛应用,如消费电子产品、汽车音响系统、通讯设备等。
自适应噪声抵消技术通过对噪声信号进行分析和处理,实现将噪声信号与待抵消信号相抵消,从而达到降噪效果。
自适应噪声抵消技术的原理是通过一种叫做自适应滤波器的算法,根据环境中的噪声信号,实时调整滤波器的参数,以使得滤波器的输出信号与噪声信号相位相反,从而实现抵消效果。
在实际应用中,通常需要在输入端采集到噪声信号和待抵消信号,然后通过自适应算法实时计算出相应的权重系数,对待抵消信号进行处理,最终输出抵消后的信号。
自适应噪声抵消技术的优势在于其能够自动适应不同环境中的噪声,实现较好的降噪效果。
相比于传统的固定滤波器,自适应滤波器更具灵活性和实时性,能够适应不同噪声信号的变化,提供更好的抵消效果。
除了在消费电子产品中广泛应用外,自适应噪声抵消技术在其他领域也有着重要的应用。
在通讯设备中,自适应噪声抵消技术能够提升信号的质量和稳定性,提高通讯的可靠性;在汽车音响系统中,自适应噪声抵消技术可以减少汽车行驶时的噪声干扰,提升乘客的舒适度;在医疗设备中,自适应噪声抵消技术可以降低手术室中的噪声干扰,保障医疗操作的准确性和安全性。
自适应噪声抵消技术也存在一些局限性。
自适应滤波器的计算量较大,需要较高的计算资源和算法运算能力;自适应滤波器的参数调整需要时间,可能无法及时适应快速变化的噪声环境;自适应噪声抵消技术对噪声信号的分析也具有一定的局限性,无法完全适用于所有类型的噪声。
面对以上的挑战,研究人员正在不断改进和优化自适应噪声抵消技术,以提升其在实际应用中的性能和稳定性。
通过引入更先进的算法和技术,优化自适应滤波器的结构和参数,以及结合其他降噪方法,如主动噪声控制(ANC)和深度学习等,可以有效提高自适应噪声抵消技术的抵消效果和适用范围。
基于DSP的自适应噪声消除系统.
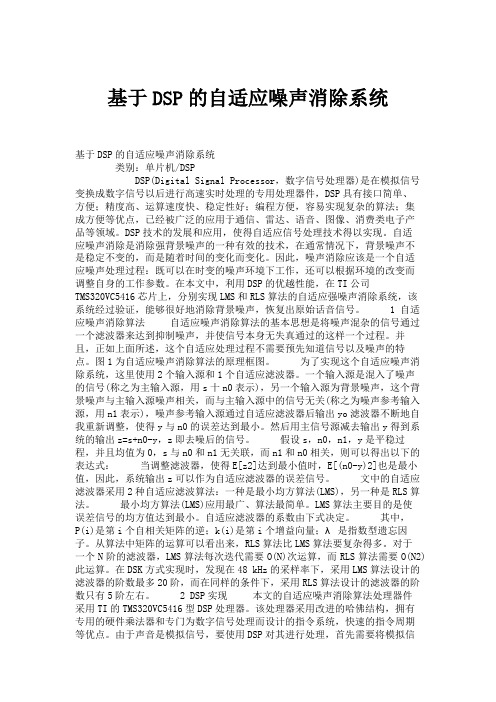
基于DSP的自适应噪声消除系统基于DSP的自适应噪声消除系统类别:单片机/DSPDSP(Digital Signal Processor,数字信号处理器)是在模拟信号变换成数字信号以后进行高速实时处理的专用处理器件,DSP具有接口简单、方便;精度高、运算速度快、稳定性好;编程方便,容易实现复杂的算法;集成方便等优点,已经被广泛的应用于通信、雷达、语音、图像、消费类电子产品等领域。
DSP技术的发展和应用,使得自适应信号处理技术得以实现。
自适应噪声消除是消除强背景噪声的一种有效的技术,在通常情况下,背景噪声不是稳定不变的,而是随着时间的变化而变化。
因此,噪声消除应该是一个自适应噪声处理过程:既可以在时变的噪声环境下工作,还可以根据环境的改变而调整自身的工作参数。
在本文中,利用DSP的优越性能,在TI公司TMS320VC5416芯片上,分别实现LMS和RLS算法的自适应强噪声消除系统,该系统经过验证,能够很好地消除背景噪声,恢复出原始话音信号。
1 自适应噪声消除算法自适应噪声消除算法的基本思想是将噪声混杂的信号通过一个滤波器来达到抑制噪声,并使信号本身无失真通过的这样一个过程。
并且,正如上面所述,这个自适应处理过程不需要预先知道信号以及噪声的特点。
图1为自适应噪声消除算法的原理框图。
为了实现这个自适应噪声消除系统,这里使用2个输入源和1个自适应滤波器。
一个输入源是混入了噪声的信号(称之为主输入源,用s十n0表示),另一个输入源为背景噪声,这个背景噪声与主输入源噪声相关,而与主输入源中的信号无关(称之为噪声参考输入源,用n1表示),噪声参考输入源通过自适应滤波器后输出yo滤波器不断地自我重新调整,使得y与n0的误差达到最小。
然后用主信号源减去输出y得到系统的输出z=s+n0-y,z即去噪后的信号。
假设s,n0,n1,y是平稳过程,并且均值为0,s与n0和n1无关联,而n1和n0相关,则可以得出以下的表达式:当调整滤波器,使得E[z2]达到最小值时,E[(n0-y)2]也是最小值,因此,系统输出z可以作为自适应滤波器的误差信号。
微弱信号检测第五章 自适应噪声抵消
—微弱信号检测—
解答:
(1)由于权数P=4,首先确定滤波常数k。
1 1 k 4 2 0.00085 2 2 2 14 16 18 20 2 Yi max i 1
—微弱信号检测—
自适应噪声抵消器的输出
ˆ (n)不相关,则E[(V (n)V ˆ (n)] 0 若V0 (n)、V 0 0 0 那么:E[e 2 (n)] ˆ 2 (n)] 2 E[(V (n)V ˆ (n)] E[ S 2 (n)] E[V02 (n)] E[V 0 0 0 ˆ 2 (n)] E[ S 2 (n)] E[V 2 (n)] E[V
(1)胎心心电图中消去母体干扰
腹部电极(原始输入)
胸参 部考 输电 极入 (自适应胎儿心电图测试仪)
输出
其中原始输入 a(t)=f(t)+m(t)+n(t) f(t):胎儿心脏产生信号 m(t):母亲心脏产生信号 n(t):噪声干扰信号(主 要由肌肉起的,有时称 “肌肉噪声”)。
采用自适应噪声抵消器消除胎儿心电图中母体心脏信号(干 扰)。一般采用:四个普通胸导(每路信号相同)记录母亲心跳, 作为参考输入信号。经过自适应噪声抵消器处理后,母亲心脏干 扰信号被显著消弱,胎儿心声可辨。
ˆ Y Y Y Y Y 11 1 10 2 9 3 8 4 7
—微弱信号检测—
噪声滤出的方法
• 固定参数的数字滤波器(如加权平均)
• 信号中直接进行点对点的噪声抵消
—微弱信号检测—
固定参数的数字滤波器
• 固定参数的数字滤波器利用自身的传输特性来抑
自适应噪声抵消技术的研究
关键词:噪声消除;自适应算法;MATLAB;DSP
II
硕士学位论文
Abstract
All systems will be influenced by noise, How to effectively eliminate the noise is one of hot subjects for years. Noise suppression is classified into two classes: Passive Noise Control and Active Noise Control. With the development of control system theory and digital signal processing, Active Noise Control puts concentration on adaptation. The adaptive noise canceling system develops from the adaptive filtering system. It can improve the quality of signal by picking up and detecting the useful signal or canceling noise in the environment which was interfered by noise. The paper studied the Active Noise Control and its application method based on adaptive filter approach. The paper begins with the principle of adaptive filter,structure and application. Based on the principle, Least Mean Square and Least Squares are researched deeply. They are important algorithms of adaptive filter. The ratiocinative process and convergence performance of the algorithms is given. Parameter effects on performance of the algorithm are studied. Based on the MATLAB platform, simulation is carried out for the applications of adaptive algorithms in noise cancelling, analysis of convergence rate and steady state error results are given under various conditions. Accordingly, merits of the different algorithms are discussed; and as an example ,the speech signal processing is introduced. On the basis of theoretical investigation and simulation, high performance implementation of adaptive filter are achieved in the paper: Noise canceller using NLMS algorithms is designed based on DSP. In the DSP implementation, a type of DSP processors is used. It is TMS320C54x processor produced by TI Corp. Peripheral interface circuit is designed. C language and assembling language is used for program. The method has advantage on rate and performance of convergence compare with LMS; and has advantage on calculation quantity compare with RLS.
自适应噪声抵消技术

目录
• 自适应噪声抵消技术概述 • 自适应滤波器原理 • 自适应噪声抵消系统设计 • 自适应噪声抵消技术面临的挑战与解决方
案 • 自适应噪声抵消技术的未来展望
01 自适应噪声抵消技术概述
定义与原理
定义
自适应噪声抵消技术是一种利用信号 处理算法,实时监测和消除噪声的技 术。
原理
硬件实现
传感器选择
根据应用场景选择合适的传感器,如麦克风、 压力传感器等。
微处理器
选用合适的微处理器,实现自适应算法和控 制逻辑。
信号处理电路
设计实现信号的放大、滤波等预处理电路。
电源管理
设计合理的电源管理方案,保证系统稳定运 行。
04 自适应噪声抵消技术面临 的挑战与解决方案
挑战一:噪声模型的不确定性
详细描述
为了实现有效的噪声抵消,自适应算法需要进行多次迭代和复杂的计算。这可能导致实时性能问题,特别是在资 源有限或处理能力不足的设备上。因此,如何在保证算法性能的同时降低计算复杂度,是自适应噪声抵消技术面 临的一个重要挑战。
挑战三:传感器阵列的布局与优化
要点一
总结词
要点二
详细描述
传感器阵列的布局和优化对于自适应噪声抵消技术的效果 具有重要影响。
减小了计算量
归一化LMS算法在实现过程中减小了计算量,提高了算法的效率。
适用范围有限
归一化LMS算法适用于信号与噪声具有一定相关性的情况,对于完全 无关的噪声抵消效果可能不佳。
03 自适应噪声抵消系统设计
系统架构
01
信号采集
通过传感器采集原始信号,包括噪 声和有用信号。
自适应滤波
利用自适应算法对噪声信号进行滤 波处理,以消除噪声干扰。
自适应噪声抵消技术的研究

自适应噪声抵消技术的研究一、概述自适应噪声抵消技术是一种重要的信号处理技术,旨在从含噪信号中提取出有用的信息。
在现代通信、音频处理、语音识别等领域中,噪声往往是一个不可避免的问题,它可能来自于外部环境、设备本身的干扰或传输过程中的失真等。
研究并应用自适应噪声抵消技术,对于提高信号质量、增强系统性能具有重要意义。
自适应噪声抵消技术的基本原理是,利用噪声信号与有用信号之间的统计特性差异,通过设计合适的滤波器或算法,实时调整滤波器的参数,使得滤波器输出的噪声信号与原始噪声信号相抵消,从而得到较为纯净的有用信号。
这一过程中,滤波器的参数调整是自适应的,即根据输入信号的变化而自动调整,以实现最佳的噪声抵消效果。
随着数字信号处理技术的发展,自适应噪声抵消技术得到了广泛的研究和应用。
已有多种算法被提出并应用于不同领域的噪声抵消任务中,如最小均方误差算法、归一化最小均方误差算法、递归最小二乘算法等。
这些算法各具特点,适用于不同的应用场景和噪声类型。
自适应噪声抵消技术仍面临一些挑战和问题。
当噪声信号与有用信号在统计特性上较为接近时,滤波器的设计将变得更为复杂;在实际应用中,还需要考虑实时性、计算复杂度以及硬件实现等因素。
未来的研究方向之一是如何进一步提高自适应噪声抵消技术的性能,同时降低其实现的复杂度和成本。
自适应噪声抵消技术是一种具有广泛应用前景的信号处理技术。
通过深入研究其基本原理、算法实现以及应用挑战,有望为现代通信、音频处理等领域提供更加高效、可靠的噪声抵消解决方案。
1. 背景介绍:阐述噪声抵消技术在现代通信、音频处理等领域的重要性和应用广泛性。
在现代通信和音频处理领域,噪声抵消技术的重要性日益凸显,其应用广泛性也随之扩展。
随着科技的快速发展,通信设备和音频系统的使用越来越广泛,噪声干扰问题也愈发严重。
无论是移动通信、语音识别,还是音频录制、音乐播放,噪声都可能对信号质量产生严重影响,甚至导致信息丢失或误判。
自适应噪声抵消
{,2漾题瀚骈究内窑
臻声撩镯技术可分为寄源啜声控囊l鞠荛潆潆声瓣黎《嚣大类,霹藤太 们最关注的研究领域是有源噪声控制技术。
宥渊嘴声控带《——Activo Noise Control,简称为ANC,是攒人为
地、褥爨鹣撼产生次级声馋譬去控锖g原有臻声浆檄躲秘方法,其中以赚低 臻j蠡为黧灏瓣夯霉穆受毒滚簿蝾。籀痘蘧,戆够突凝这些凌毙弱设备袋髅 鹱:势鬈《称为霄澡燕暴§器、畜源衰减器等等。逮蠢滚靛潮方法嚣予一黢鹃嗓 声臻秽躐魄声嚣律豁援裹焚藏潦声程戆薅,粼程簇露嚣箨粒名稼§》嚣疆 “ff滁”的字头,如有源护耳器、有源抗噪声送、跫话器。ANC的磷究涉 及n勺学科非常广泛,包括声学与搬动的基本理论、数字信号处理、自渤化 控制、旅统科学等。有源噪声控制技术发展方向蒂掰研究重点是自适成赚噪 投本戳殿j!缝空闯熬枣滚酶曝麓燧。
《{熹
1.弓l言
{。{漯熬瀚研究意义
随瀚珊代]:业的发展,嗡声污染已成为一个懒界性的问题。生活和 l。佟在噪声环境中的人们不仅搬体健康受到了损辩,掰且工作效率也降低
了。
纂在二一}。邀纪三卜年代入翻虢已经豢谈烫啜声较铡鹣耋要缝,麸鄹 以纛,翔¥i尽露§l地簿酝臻簿始终蹩一仑菱要鼹戮究漾越。七卡年我浚浓, 随祷计骡税技术的弓l入以及德号处理技术的进鼹,嚼声控锖8技术开始彀褥 快迷的敏滕。这项技术能极大地淑善受r商噪声环境影响的人们的工作生活 条fl:,眺I姑其有很好的环保愆义。
nlicr()phone in various acoustic environments have been analyzed.On the other
l训1d U1e effects influenced by the order ofthe LMS,normalized LMS,and RLS
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
时, E[z2]的值最小。此时有
Hop(tjw)F(jw)
Hopt(jw)称为最佳滤波器。
噪声抵消系统应用的例子
(见后面)
7.1.2 噪声抵消系统的性能分析
• 实际的噪声抵消系统模型
在实际中,信号s(t)也会混入到噪声通道里s’(t) , 同时信道里还会混入独立的噪声m(t) 。
T
E E[nn ]
干扰噪声成分n’与干扰噪声矢量 n 构成的互相关矢量
干扰噪声的相关矩阵
• 则:
E [z 2 ] a 2 E [s 2 ] a 2 E [n '2 ] 2 ap T b b 2T E
• 权系数的选择应使E[z2]最小。 • 令:
• 即,
E[z2 ] 0 i
2abp2b2E0
• 定义:抵消余度
1 R
Emi n[z2 ]
s0
a2E[n'2 ]
• △越小则抵消性能越好,△=1表示无抵消功能。
1abpE [n'o2p]t1pET[E n'21]p
例:已知系统参数a=b=1,干扰噪声成分n’(t)与干扰噪声之间存在下述的 关系
n’(t)=n[t-(L-1)0]。
而干扰噪声的自相关函数满足
自适应噪声抵消原理
根据输出信号z(t)的均方值是否达到最
小,自动调节H(jw)的网络参数。
1 横向滤波器
• 三部分组成:
– 等间隔抽头延 迟线;
– 可调增益电路; – 加法器。
y(t)0th()n(t)d
权系
l
l
数
h(kt)n(tkt)t knk(t)
k1
k1
2 由横向滤波器构成的噪声抵消系统
信道F(jw)混入信号中的观察噪声。 ➢要求最佳滤波器H (jw) ,使y(t)抵消n’(t) ,从而使
系统输出z(t)中对噪声有最佳的抑制效果。
• 噪声抵消电路中的输入信号:
•
u(t)=s(t)+n’(t)
• 噪声抵消电路输出信号
z(t)=d(t)-x(t)=s(t)+n’(t)-y(t)
z(t)的均方值
• 最佳权矢量应为:
E opt a p
b
3. 系统的抵消性能
• 如果系统采用了最佳权矢量,则输出方差最小值为
Emi[nz2]a2E[s2]a2E[n'2]abpTopt
a2E[s2]a2E[n'2]pTE1p
• 定义:抑制比为
R
a 2E[n'2 ] E min [ z 2 ]
s0
• 衡量系统对干扰噪声成分的抵消程度。
E[n(t)n(t)] E[n2]
0
(0) (0)
试求各个权系数及抵消余度。
答案:
opt
1
2
L
0
0 , 0
1
0。
7.3 自适应算法
• 系统在开始工作时,无法事先知道互相关矢 量和自相关矩阵,则不能事先得到最佳权系 数。而是通过自适应系统,自动逼近。
7.3.1最佳滤波准则
• 常见最佳滤波准则: • 最小均方误差准则(MMSE:Minimum Mean Square Error) • 最小二乘准则(LS:Least Square) • 最大信噪比准则(MaxSNR) • 线性约束最小方差准则(LCMV:Linearly Constrained Minimum Variance )
Hopt(jw)=F(jw) ,SNRo=∞, D=0
这是最理想的。
• (2)独立噪声存在,但信号不混入噪声信道 中。此时输出中包含有噪声成分,
SNRo≠∞, Sno(w)≠0
•(3)没有独立噪声,但信号混入到噪声信道中
。此时:
Hopt(jw) ≠F(jw)
混入信号的噪声不可以被完全抵消,输出包含 有噪声成分;同时输出信号也被抵消部分,产 生失真。 输出信噪比和失真度为:
www w w SN O S s R (S )n G (() j)2, D G (j)2•F (j)2
7.2 自适应噪声抵消
• 利用噪声与被测信号不相关的特点,自适应地调 整滤波器的传输特性,尽可能地抑制和衰减干扰 噪声,以提高信号或信号传递的信噪比。
• 噪声抵消技术应用非常广泛,在通信、雷达、声 纳、生物医学工程等方面已有成功的应用范例。
• (1)输出信噪比:
SN O输 R 出信 /输号 出功 噪 Ss率 (o w 声 )/Sn(功 o w)
当Sno(w)=0时,SNRO=∞,理想状态。
• (2)输出信号失真度: DSs(w)Sso(w) Ss(w)
输出信号功率谱和输入信号功率谱完全一 样,是最理想的。
几种情况
• (1)信号不混入到噪声信道,同时没有独立 的附加噪声。此时:
E [z2] E [s2(t) ]E [n { '(t) y(t)2 } ] 2 E [s(t)n { '(t) y(t)}] E [s2(t) ]E [n { '(t) y(t)2 } ]
包含了两部 分功率
• s(t)的功率E[s2(t)]是一定的,当E[z2]的值最小时 ,表明噪声的功率最小,信噪比最好。显然,当
第七讲自适应噪声抵消技术
7.1 噪声抵消系统
7.1.1 噪声抵消原理
• 传感器1感知信号源的信号,同时会叠加有背景噪 声。传感器2感知背景信号。如果两个传感器的特 性相同,两个传感器的输出信号相减就得到被测 信号s(t)。
基本噪声抵消电路
➢n(t)和n’(t)有相关性, n’(t)可以看着n(t)通过一传输
• 输出z(t)表示为:
za(st)a'n (t)bnT
• 其中:
n1
n
ห้องสมุดไป่ตู้
n2
n L
1
2
L
• 输出信号的均方值:
E [z2]E [a ( sa' nbnT)2]
a2E [s2]a2E [n'2]2ab [n'n E T] b2
TT
E [nn]
• 令,
p E[n'n]
互功率谱:
Suv(w) Sn'n(w)Ss's'(w)
Snn'(w) F( jw)Sn(w)
Sss'(w) G*( j)Ss(w)
这样可以得到:
H op (jtw)S F n((w jw ) )S S n m (w (w )) G S * s((w jw )G )S (sj(w w ))2
抵消系统的性能指标
• 抵消系统的输入为:
u(t)s(t)m'(t)n'(t) v(t)n(t)s'(t)m(t)
• 滤波器H(jw)的最佳值:
Ho
p(t jw)
Suv(w) Sv(w)
u(t)和v(t)的功率谱:
S Su v((w w)) S Sn s((w w)) S Sm m((w w)) S Sn s((w w))G F((jjw w))2 2