基于TMS320VC54X的实时卫星信号跟踪系统
●应用与设计
图1系统的功能框图
基于T MS320VC54X 的实时卫星信号跟踪系统
孙华伟,
郑林华
(国防科技大学电子科学与工程学院,湖南长沙410073)
摘要:介绍了一种在移动载体上实现卫星信号实时跟踪的系统设计方案,该方法以T MS320VC54X
为核心信号处理芯片,利用姿态敏感元件稳定运动中的卫星接收天线,以使其始终对准所要跟踪的同步卫星,文章给出了这种方法的硬件原理和主要的软件设计思路。关键词:姿态敏感;DSP;光纤陀螺;卫星通信分类号:T N927
文献标识码:B
文章编号:1006-6977(2004)01-0007-04
The R esearch of the R eal -time Trackin g S y stem of Satellite Si g nals
B ased on TMS320VC54X
SUN Hua-w ei ,
ZHENG Lin -hua
Abstract :T he desi g n m easures of the real -tim e trackin g s y stem of satellite si g nals on the m ovin g carrier is p ro 2p osed.T he T MS320VC54X is selected as its kernel chi p s.W ith the g esture sensitivit y elem ents ′
stabilizin g ,the satellite -receive antenna in m ovin g can aim at the s y nchronouse satellite.Its hardw are structure and m ain soft 2w are device are also described.K e y w ords :g esture sensitivit y ;
DSP;
statellite commuciation
1引言
实现运动中的卫星通信通常是利用姿态敏感元件来消除由于载体本身和运动所产生的天线对准精度的影响,从而使卫星天线的主轴或主瓣始终对准卫星方向。在姿态敏感元件中,陀螺仪是一个不可缺少的关键器件。近年来,随着精度的提高和价格的降低,光纤陀螺得到了越来越广泛的应用。本文即采用光纤陀螺作为主要的姿态敏感元件。
随着数字处理芯片功能的越来越强,精度越来越高,采用低成本高性能的数字处理芯片实现实时高精度的信号跟踪已成为可能。
现有的移动卫星信号跟踪系统多采用工控计算机来实现,这种方法不仅体积庞大,而且造价较高,本文选用TI 公司的T MS320VC54X 芯片设计了一个移动卫星电视信号跟踪系统。该系统体积小、性价比高。可广泛用于汽车、火车、轮船等移动载体。
2系统功能
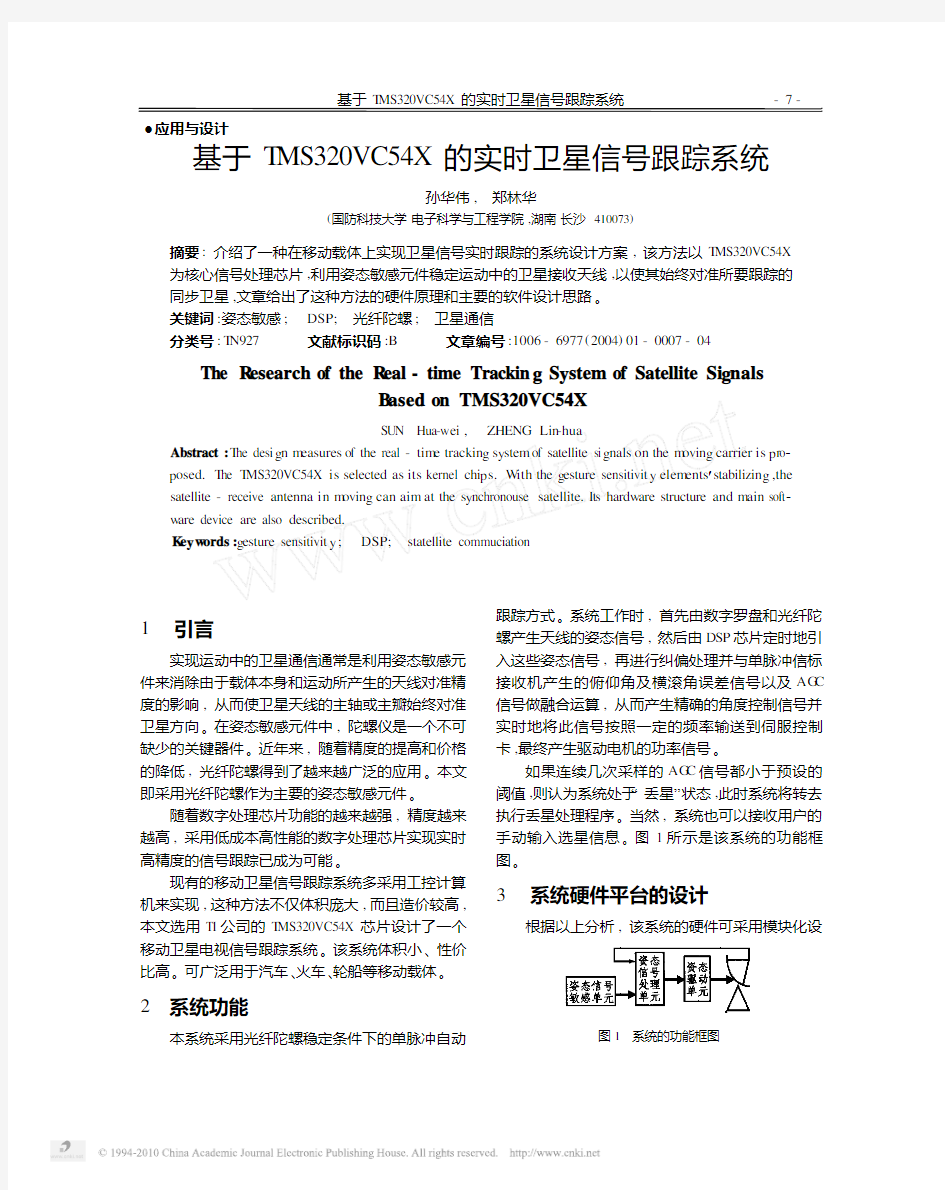
本系统采用光纤陀螺稳定条件下的单脉冲自动
跟踪方式。系统工作时,首先由数字罗盘和光纤陀
螺产生天线的姿态信号,然后由DSP 芯片定时地引入这些姿态信号,再进行纠偏处理并与单脉冲信标接收机产生的俯仰角及横滚角误差信号以及AG C 信号做融合运算,从而产生精确的角度控制信号并实时地将此信号按照一定的频率输送到伺服控制卡,最终产生驱动电机的功率信号。
如果连续几次采样的AG C 信号都小于预设的阈值,则认为系统处于“丢星”状态,此时系统将转去执行丢星处理程序。当然,系统也可以接收用户的手动输入选星信息。图1所示是该系统的功能框图。
3系统硬件平台的设计
根据以上分析,该系统的硬件可采用模块化设
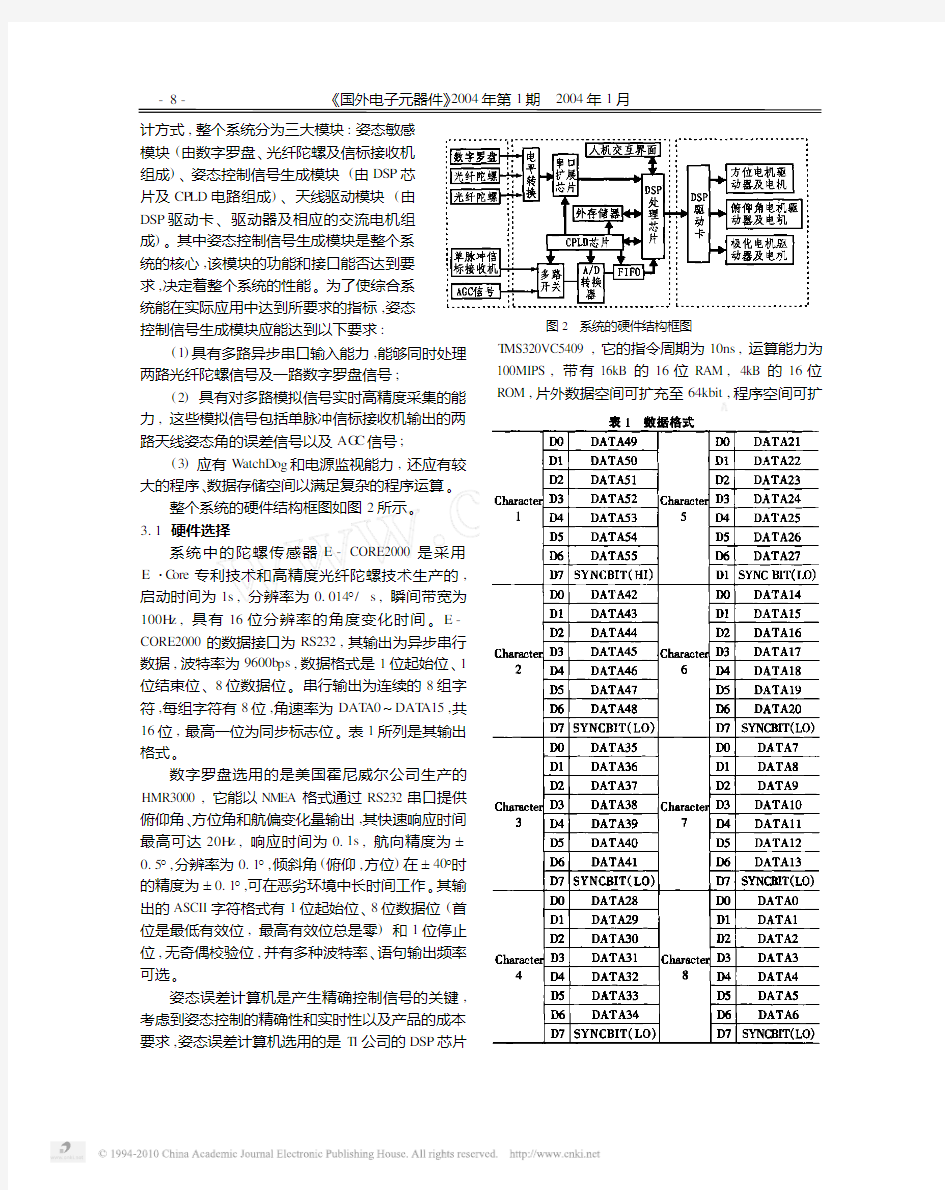
图2系统的硬件结构框图
计方式,整个系统分为三大模块:姿态敏感模块(由数字罗盘、光纤陀螺及信标接收机
组成)、姿态控制信号生成模块(由DSP 芯片及CP LD 电路组成)、天线驱动模块(由DSP 驱动卡、驱动器及相应的交流电机组成)。其中姿态控制信号生成模块是整个系统的核心,该模块的功能和接口能否达到要求,决定着整个系统的性能。为了使综合系统能在实际应用中达到所要求的指标,姿态控制信号生成模块应能达到以下要求:
(1)具有多路异步串口输入能力,能够同时处理
两路光纤陀螺信号及一路数字罗盘信号;
(2)具有对多路模拟信号实时高精度采集的能力,这些模拟信号包括单脉冲信标接收机输出的两路天线姿态角的误差信号以及AG C 信号;
(3)应有W atchD o g 和电源监视能力,还应有较大的程序、数据存储空间以满足复杂的程序运算。
整个系统的硬件结构框图如图2所示。3.1硬件选择
系统中的陀螺传感器E -CORE2000是采用E ?C ore 专利技术和高精度光纤陀螺技术生产的,启动时间为1s ,分辨率为0.014°/s ,瞬间带宽为100H z ,具有16位分辨率的角度变化时间。E -CORE2000的数据接口为RS232,其输出为异步串行数据,波特率为9600b p s ,数据格式是1位起始位、1位结束位、8位数据位。串行输出为连续的8组字符,每组字符有8位,角速率为DAT A0~DAT A15,共16位,最高一位为同步标志位。表1所列是其输出格式。
数字罗盘选用的是美国霍尼威尔公司生产的HMR3000,它能以NMEA 格式通过RS232串口提供俯仰角、方位角和航偏变化量输出,其快速响应时间最高可达20H z ,响应时间为0.1s ,航向精度为±0.5°,分辨率为0.1°,倾斜角(俯仰,方位)在±40°时的精度为±0.1°,可在恶劣环境中长时间工作。其输出的ASCII 字符格式有1位起始位、8位数据位(首位是最低有效位,最高有效位总是零)和1位停止位,无奇偶校验位,并有多种波特率、语句输出频率可选。
姿态误差计算机是产生精确控制信号的关键,考虑到姿态控制的精确性和实时性以及产品的成本要求,姿态误差计算机选用的是TI 公司的DSP 芯片
T MS320VC5409,它的指令周期为10ns ,运算能力为100MIPS ,带有16kB 的16位RAM ,4kB 的16位ROM
,片外数据空间可扩充至64kbit
,程序空间可扩
图3ST 16C554接口图4系统的软件流程图
充至1M bit 。该DSP 可在3.3V 电压下工作,并带有两个自动缓冲串口。
该系统中的驱动模块处理芯片选用TI 公司的T MS320C541B ,该芯片的主频为66MH z ,有5kB 的16位RAM 、28kB 的16位ROM ,该芯片也工作在3.3V 电压下,并带有两个标准串口。
异步串口扩展芯片使用ST 16C554,该器件具有1.5M b p s 的收发速率,通过软件可设置其波特率。它还带有4个异步串行接口,并有4个16字节的FIFO 缓冲器。可用于发送数据,因而可提高数据的传输效率和准确度。
CP LD 选用XI LINX 公司生产的XC9536X L 芯
片,它的工作频率为178MH z ,TPD 为5.0ns ,该芯片有36个宏单元和800个逻辑门,内核电压为3.3V ,有34个I/O 引脚。3.2硬件工作原理
为达到系统实时性要求,鉴于DSP 本身结构上的限制,需要对其接口部分重新设计,本文采用DSP 和CP LD 的组合来实现多路信号的分时输入。
由于T MS320C54x 系列DSP 芯片没有提供标准的UART 接口,故不能直接与光纤陀螺连接,因此采用扩展芯片来实现异步信号的输入,其基本过程为:首先对ST 16C554初始化,然后由CP LD 依次选通三路输入的片选端口,在选通期间,当接收数据满时,由ST 16C554通过CP LD 向DSP 提出中断,然后由CP LD 向ST 16C554发出读信号以将数据读入存储区。ST 16C554的主要接口如图3所示。
两路模拟信号转换电路的工作过程为:先由DSP 触发FIFO 复位以使其读写指针复位,然后让指针指向预先设定的物理单元,同时通过CP LD 来触发采样过程。
由于FIFO 的读、写过程是完全独立的,所以
DSP 芯片在每一个定时中断中可一次性将采样数据
读入DSP 的内存区域,读完数据后进入下一个采样
过程。因此,整个系统硬件工作顺序如下:
(1)DSP 加电复位后,通过CP LD 触发扩展串口,
然后分时输入光纤陀螺的测量值;
(2)由DSP 输入单脉冲信标接收机的输出值;(3)为DSP 输入AG C 信号;
(4)为DSP 驱动卡输入上位计算机的角度误差
信号。
4系统软件设计
4.1基本原理
由于光纤陀螺输出的是被测体的角速度变化率
(用16位的数字量表示),因此,对其进行积分便可
得到被测体的角度变化量Δ
θ。Δθ=θ0+∫i i +1
i k (ωi +1-ω0)dt
其中:k 为陀螺传感器的标度系数;ωi +1为陀螺传感器在i +1时间内的角速率输出量;ω0为陀螺传感器在静止状态时的角速率输出量;θ0为起始状态时的航向角,一般情况下,可将数字罗盘的输出值作为初始角。
光纤陀螺存在的漂移是影响系统卫星对准的主要因素,因此要采用一定的纠偏算法来纠正漂移,本文中利用K ALM AN 滤波的方法纠正漂移,方法可将光纤陀螺的运动方程和观测方程抽象为:
其中,x (k )为光纤陀螺的角速度,假设w (k )为
白噪声,即E W =0,E WS W f =δf s σ
2
W ,y (k )为x (k )的观测方程,即光纤陀螺的输出角速率,假设v (k )为白
噪声,即E vt =0,Ev s v f =δf s σ2
v ,并假设w 、
ν是独立的,则根据K ALM AN 滤波理论,采用简化的光纤陀螺漂移模型(将其看作角速度变化为等随机加速的)即可完成滤波。4.2软件实现方法
为了高效实现上述功能,该软件可分为几个模块。其软件框图如图4所示。其中敏感元件信号处理
(上接第6页)输出数据的FIFO大小为256字节;
(5)对每块程序空间进行二进制代码装载,具体过程如下:
●向0x08寄存器写0x04,发送开始命令;
●等待Read y中断,清除Read y中断;
●向Data in寄存器0x01写256个字节;
●等待End of Data中断,然后清除中断;
(6)查程序空间的代码是否装载完毕,如没有,回到(5)继续装载。
3.3SZ1510视频数据的获取
SZ1510内部有一个256字节的FIFO。一旦该FIFO满,即产生一个FIFO Read y中断,以通知主机读取FIFO中的数据,然后通过256次读Data out寄存器来完成数据传输。
4注意事项
SZ1510芯片的P LL PC B设计要求如下:
(1)应用设计EMI滤波装置以减少VDDA的电源噪声。
(2)LPF到SZ1510的整体电路管脚长度应当小于0.5英寸。
(3)设计PC B时,外部LPF应尽量接近封装脚。
(4)VDDA和VSSA端应接0.1μF的旁路电容以减少噪音。
参考文献
[1]PC/104-p lus s p ecification Version1.1PC/104
C onsortium.
[2]sz1510DataSheet-3.0.
[3]马小虎,张明敏,严华明,等.多媒体数据压缩
标准及实现[M].北京:清华大学出版社,1996. [4]张立东,张登福,毕笃彦.视频编码芯片W99200F
军用机载音视频记录系统中的应用[J].信号处
理,2001,(11).
[5]P LX9030Data Sheet.
收稿日期:2003-06-24
咨询编号:040101
模块主要完成三路姿态信号的纠漂处理,并将结果存储在预设的DSP内存区域;模拟信号处理模块主要完成信标信号、AG C信号的限幅、线性处理并存储结果;姿态变化角产生模块主要对单脉冲信标接收机测得的角度误差、光纤陀螺输出的姿态信息以及AG C信号等多路信息进行融合计算,以产生出精确的角度偏移;驱动模块主要是将上位计算机传送来的角度偏移信息进行转换,以生成功率驱动信息并驱动电极,同时检测驱动机组的运转情况。
“丢星”时通常的解决方法是利用G PS定位组件测量出载体当前的经纬度,然后利用所跟踪卫星的已知经纬度及载体的加速度推算出当前天线应保持的角度,本文没有采用G PS定位组件,所以不能利用卫星和天线的相对经纬度推算定位,但可以利用存储在内存中的天线的初始姿态所构建的数学平台,结合丢星时姿态敏感元件输出的载体和天线的姿态角做融合运算,以解算出天线大致的指向,然后根据AG C的变化进一步地调整。
对于用户交互模块(手动选星),可由用户输入所选卫星的编号,然后利用存储在内存中的数据计算出所需的角度,并结合姿态敏感元件测量的姿态角,再经过数据的拟合运算计算出所需调整的俯仰角、方位角等信息,最后驱动天线指向目标卫星。5结束语
本文提出了一种利用DSP芯片和CP LD芯片组合实现移动卫星电视接收系统实时跟踪的方案。在实验平台上的仿真结果表明,这种方法已达到设计要求,证明该系统是可行的。由于本系统所采用的姿态敏感元件易受周围环境的影响,因此在实际安装实验中还应考虑铁磁干扰等问题,必要时应进行一定的铁磁补偿。
参考文献
[1]Lee J G.Park H W.M ulti p osition ali g nm ent of
stra p down inertial navi g ation s y stem.IEEE
T ransactions on Aeros p ace and E lectronic S y stems,
1993,29(4):1323~1328.
[2]祁煜,等.基于CP LD和FIFO的多通道高速数据
采集系统的研究[J].电子技术应用,2003,(2).
[3]E-CORE2000datasheet.
[4]T MS320VC5409datasheet.
[5]ST16C554datasheet.
[6]赵会平.移动接收卫星电视的天线自动跟踪系
统[J].西部广播电视,2002,(3).
收稿日期:2003-07-14
咨询编号:040102
基于北斗的车辆监控调度系统项目解决方案V10
基于北斗的车辆监控调度系统 解决方案 北京国翼恒达导航科技有限公司
目录 1系统概述 (1) 2系统建设目标 (1) 3系统总体设计 (2) 3.1 系统总体结构 (2) 3.2 系统组成 (3) 4车辆监控管理平台分系统设计 (3) 4.1 车辆实时监控管理软件 (3) 4.1.1 地图服务 (3) 4.1.2 车辆位置监控 (4) 4.1.3 车辆轨迹回放 (4) 4.1.4 车辆状态监控 (5) 4.1.5 车辆报警管理 (5) 4.1.6 车辆指挥调度 (6) 4.1.7 车辆统计分析 (6) 4.1.8 系统管理 (7) 4.2 北斗指挥机 (7) 5智能车载终端分系统设计 (7) 5.1 北斗RDSS车载终端 (8) 5.1.1 产品功能 (8) 5.1.2 产品技术指标 (8) 5.1.3 产品结构特征 (10) 5.2 导航仪 (11) 5.2.1 产品性能指标 (11) 5.2.2 产品结构特征 (12) 5.3 嵌入式软件 (13) 6 系统预算 (14)
1系统概述 在不同行业领域的应用中,车辆不再简单充当运输载体,车辆管理部门往往把车辆作为一个信息点对其进行数据采集跟踪指挥布控。在现阶段,车辆监控普遍采用GPS(全球定位系统)与其他通信系统相结合的方式,实现对车辆监控的要求。但是采用这种车辆监控方式也存在着诸多的弊端,如在移动基站信号覆盖弱的地方,通信成功率低、车队之间无法远距离通信、上级管理部门无法指挥调度等问题,都将影响监控系统的稳定可靠性。北斗卫星导航系统是我国自行研制开发的全球卫星定位与通信系统,随着我北斗二代系统投入使用,北斗系统运用于各特种车辆及重点车辆监控,是必然的发展趋势。 基于北斗的车辆监控调度系统将北斗卫星导航定位技术、GIS地理信息系统技术、互联网技术有机结合,针对不同类型车辆如危化品运输车、客运车、政府部门车辆及各种特种车辆如警用车、运钞车、消防车,救护车、邮政车、工程抢险车等,可提供系统监控中心的整体解决方案。监控中心通过北斗卫星网络,能够实现全天候网络无缝覆盖获取车辆的地理位置、运行方向、运行速度及各种状态信息,对车辆进行实时监控、调度、发布服务信息、受理各种类型的报警信息等。本系统扩展性强,配置灵活方便,规模可大可小,监控中心可适应小到几辆车,大到数万辆车的监控和管理。 2系统建设目标 基于北斗的车辆监控调度系统以北斗卫星导航系统作为车辆定位和监控调度及监控中心与车辆间通信的支持平台。本系统能够在广阔疆域全天候、无缝隙、
位置跟踪系统ART成功案例介绍
ART:虚拟现实专家 ART概况: -成立于1999年 -独立公司, 由多个CEO共同所有 -专注于红外光学位置追踪系统 -全部产品都为“德国制造” -全世界建立有1000个以上的追踪系统 -在2011/2012财年销售已超过150套系统 ART是虚拟现实应用的专家! -虚拟现实光学追踪相关系统的市场领导者 -虚拟现实市场中众所周知的高质量追踪 -客户遍布各个领域:工业,研究机构,大学,医学和工程学 -自主研究,开发和生产制造 面向客户的解决方案 -高精度和简单易用的产品 -寿命长,稳定性高 -快速全面的现场支持 -我们的质量被我们众多合作伙伴所认可,在世界各地的虚拟现实展示中心中使用的都是ART产品(例如,达索巴黎总部,ICIDO和ESI办公室,RTT总部, Techviz总部以及很多其他场所) 达索巴黎总部
ART 产品: o洞穴系统解决方案: TRACKPACK /C o洞穴用摄像头 o35毫米直径的小型摄像头部 o捕捉范围3.5米 o Flystick2: o六自由度捕捉 o物理模拟摇杆和六个按键(包括下方的扳机) o无线信号传输(ISM频段) o保护良好的被动捕捉目标 o同时支持多个Flystick2同时使用 ? University of Siegen o Flystick3: o轻型交互设备 o六自由度捕捉 o物理模拟摇杆和4个按键(包括下方的扳机) o无线信号传输(ISM频段) o配有充电台 o同时支持多个Flystick3同时使用 ? University of Potsdam
ART 产品: o手指追踪: o我们的轻便手部追踪解决方案 o精确测量手指尖端位置信息(3或5个手指) o无线技术:主动标记点发送红外同步信号 o使用卫生,无需佩戴手套 o简单快速的两步校准过程 o软件提供多个校准配置管理功能 ? Volkswagen o安装简便的眼睛标记点: o在被动或主动立体系统中的头部位置追踪,追踪标记点必须与立体眼镜切实贴合。ART提供轻型的通用标记目标和为各类眼睛品牌型号制作的标记目标。 ? University of Potsdam o特殊定制标记目标: o在提供的标准标记目标系列之外,我们根据客户需要专业定制特殊的标记目标。 ?EADS
车辆GPS监控管理系统方案
xxxx车辆GPS监控管理系 统设计方案 2011年03月2日
目录 一. 总体方案设计 (3) 二. 系统组成及基本原理 (4) 1、系统组成 (4) 2、车载定位系统终端功能 (4) 3、登录连接 (6) 4、样品说明 (7) 三. 产品优势及技术指标 (9) 四. 系统软件说明 (10) 1、登陆界面 (10) 2、系统控制 (10) 3、系统设置 (10) 4、地图操作 (10) 5、工具类型 (12) 6、紧急处理 (12) 五. 工程说明 (12) 六. 系统报价 (13)
一.总体方案设计 目的和目标 为实行车辆运输智能化管理体制的需要,确保车辆部门拥有完善的办公自动化能力和现代化综合管理水平,建立一套安全可靠、技术先进、功能完善、经济实用的办公自动化和安全防范保障系统。使各有关管理部门和工作人员对作业现场突发事件有快速反应及通过简单的操作进行各种处理,以达到工作高效、信息互通的目的。实现对车辆的定位管理、监控车辆,杜绝公车私用,节省油耗,降低车辆费用。 整套系统主要为加强车辆运输的安全系数,提高工作效率而设立,在此我们强调人机对话要简单、直观,不容易造成人为误操作、对设备的安装和维护要求更加方便、快捷,不能让工作人员觉得在进行人机结合工作时有门槛,为此我们选用在无需专业培训,只需看看操作说明便可立即操作的自动化监控系统。由于GPS监控系统属于ERP体系中的子系统,故此,必须考虑系统的互换性和兼容性。 针对xxxx的需求我公司认真研究,推荐使用我公司开发的两种产品:GT2内置天线型和GT9天线外置型机器。这两款机器内部软件相同所登录平台相同。该产品定位准确、安装简便、操作方便及其适合贵单位使用。
高速实时数字信号处理系统技术探析
高速实时数字信号处理系统技术探析 (毛二可院士 龙腾副教授) 高速实时数字信号处理(DSP)技术取得了飞速的发展,目前单片DSP芯片的速度已经可以达到每秒16亿次定点运算(1600MIPs到4800MIPs);最近TI宣布1GHz DSP已经准备投产。其高速度、可编程、小型化的特点将使信息处理技术进入一个新纪元。一个完整的高速实时数字信号处理系统包括多种功能模块,如DSP、ADC、DAC等等。本文的内容主要是分析高速实时数字信号处理系统的产生、特点、构成、以及系统设计中的一些问题,并对其中的主要功能模块分别进行了分析。 一、高速实时数字信号处理概述 1.信号处理的概念 信号处理的本质是信息的变换和提取,是将信息从各种噪声、干扰的环境中提取出来,并变换为一种便于为人或机器所使用的形式。从某种意义上说,信号处理类似于"沙里淘金"的过程:它并不能增加信息量(即不能增加金子的含量),但是可以把信息(即金子)从各种噪声、干扰的环境中(即散落在沙子中)提取出来,变换成可以利用的形式(如金条等等)。如果不进行这样的变换,信息虽然存在,但却是无法利用的;这正如散落在沙中的金子无法直接利用一样。 2.高速实时数字信号处理的产生 早期的信号处理主要是采用模拟的处理方法,包括运算放大电路、声表面波器件(SAW)以及电荷耦合器件(CCD)等等。例如运算放大电路通过不同的电阻组配可以实现算术运算,通过电阻、电容的组配可以实现滤波处理等等。模拟处理最大的问题是不灵活、不稳定。其不灵活体现在参数修改困难,需要采用多种阻值、容值的电阻、电容,并通过电子开关选通才能修改处理参数。其不稳定主要体现为对周围环境变化的敏感性,例如温度、电路噪声等都会造成处理结果的改变。 解决以上问题最好的方法就是采用数字信号处理技术。数字信号处理可以通过软件修改处理参数,因此具有很大的灵活性。由于数字电路采用了二值逻辑,因此只要环境温度、电路噪声的变化不造成电路逻辑的翻转,数字电路的工作都可以不受影响地完成,具有很好的稳定性。因此,数字信号处理已经成为信号处理技术的主流。 数字信号处理的主要缺点是处理量随处理精度、信息量的增加而成倍增长,解决这一问题的方法是研究高速运行的数字信号处理系统;这就是本文所探讨的主题:高速实时数字信号处理的理论与技术。 3.高速实时数字信号处理特点 高速实时数字信号处理的特点: 首先是高速度,其处理速度可以达到数百兆量级。
基于GPS定位的车辆调度管理系统
基于GPS和无线网络的车辆调度管理系统 大唐高鸿数据网络技术股份有限公司 2005.1
、八 大唐高鸿公司提供的车辆调度管理系统(最新软件版本 3.0 ),采用Client (客户机) /Server (服务器)模式,以gpsOne/GPS技术为基础,综合运用GIS (Geographic In formation System ,地理信息系统)技术、CDMAIX^动通信技术,可广泛用于各种车辆、船舶和其它移动目标的位置跟踪、指挥调度、应急救急等。同时,所配移动终端具有全球定位、防盗报警、监听录音、紧急求助、车况记录、车载电话、移动上网、图像传输等功能。 本系统最大的特点在于: 采用gpsOne/GPS定位,gpsOne技术可以最大限度缩少定位盲区;支持CDMA1数 据传输; 同时支持通过GSM/CDM短信中心和GSM/CDM前置机两种通讯方式,能满足位置服务商和集团用户的不同需要; 有C/S 模式、B/S 模式,人性化操作,自动换图,无缝拼接;支持手机短信查询。
一、项目综述.......................................................................... 二、系统方案......................................................................... 2.1系统简介........................................................................ 2.2 方案论证....................................................................... 2.2.1 GPS定位原理......................................................... 2.2.2 gpsOne 定位原理...................................................... 2.2.3系统构架比较 ........................................................... 2.3结论............................................................................ 三GPSONE/GP弄辆调度管理系统 ..................................................... 3.1概述............................................................................ 3.2系统结构........................................................................ 3.3系统功能........................................................................ 3.3.1 系统实现功能.......................................................... 3.3.2 gpsOne/GPS定位终端功能 .............................................. 3.4系统特点....................................................................... 3.4.1 成熟的短信网关技术..................................................... 3.4.2成熟的监控中心软件和终端硬件产品 ...................................... 3.4.3完善的技术服务保障体系 ................................................ 3.4.4 系统其他优点........................................................... 3.5系统性能指标.................................................................... 3.5.1系统容量 ............................................................... 3.5.2定位精度 ............................................................... 3.5.3实时性................................................................. 3.5.4移动定位终端工作参数 ................................................... 附录A:公司情况简介 .................................................................. A.1公司简介........................................................................ A.2技术、工艺、设备介绍........................................................... A.2.1产品技术及工艺优势..................................................... A.2.2主要产品...............................................................
车辆定位及货物追踪系统(GIS)
1.1.1 系统概述 车辆定位及货物追踪系统面向中小物流企业提供对其自有车辆监控调度、货运管理,面向中小物流企业和货主提供货物跟踪支持功能,各会员企业只需购买GPS/GS智能车载单元即可为客户提供高质量的物流状态跟踪服务。同时,实现了对政府部门运政执法车辆、应急指挥车辆等的及时监控,一方面在处理突发事件时,便于应急交通指挥工作的开展,另一方面,还将起到规范交通行政执法人员执法行为、提高文明执法水平、确保交通运输安全、提升交通文明形象等作用。 车辆定位及货物追踪系统功能框架图 1.1.2 功能设计 1.1. 2.1 实时监控 1. 车辆实时监控 车辆实时监控功能主要面向物流企业和政府部门,用户通过实时监控功能可以掌握车辆的位置信息、车辆状态信息等车辆实时监控 功能可以有效的使运输企业监督驾驶员的驾驶行为,了解下属车辆的 运行信息,同时为政府部门在处理突发紧急事件时的指挥工作提供了依据。 2. 货物跟踪监控 货物实时监控功能主要面向货源单位和物流企业。用户通过实时监控功能可以掌握货物的位置信息、货物状态信息等。从而为了解货物位置、货物状态、监督运输过程、制定生产决策等提供帮助。 1.1. 2.2 轨迹回放 轨迹回放功能主要面向物流企业和货主,用户通过轨迹回放可以了解了解车辆/ 货物历史的行驶情况,便于运输企业查看、监督下属车辆和驾驶员的工作情况,便于货源单位了解货物运输情况,监督运输企业运输过程。回放前用户可以自定义回放的电子地图,回放过程中用户可以自行调节回放速度、 同时系统在明显信息中详细显示每点轨迹信息。
1.1. 2.3 报警管理 报警管理功能主要面向车主、运输企业,在报警管理功能模块用户可以设定各种发出警报条件,如盗车报警、断电报警、越界报警、超速报警、温度报警等,当车辆状态超出设定范围时系统自动向用户发送警报信息,如车辆位置、报警原因等,以便用户更快掌握车辆和货物当前信息,对突发状况尽快提出解决方案。 发状况。 1.1. 2.4 远程控制 远程控制功能主要面向物流企业,为物流企业提供对车机呼叫、车机回复参数设计、车机限拨号码限制、遥控车辆熄火、监听车内状 况等功能,以便运输企业能及时了解车辆状况、控制调度车辆行程、处理突发事件等。 1.1. 2.5 统计报表 统计报表功能主要面向物流企业和政府部门,为用户提供车辆情况统计报表、驾驶情况统计报表、警情信息统计报表等服务。帮助企业掌握下属车辆、司机的工作信息,对制定企业工作计划、监督司机工作行为等起到参考作用。政府部门通过统计报表可以了解企业的生产行为,加强对企业的监管。 1.1. 2.6 系统管理 系统管理功能主要面向企业用户和系统管理员。企业用户可以通过系统管理功能管理下属车辆资料、车辆运行任务、公司工作人员资料,为企业用户高效管理智能化调度提供支持。系统管理员通过系统管理功能可以管理用户权限。为用户分配权限,用户登录系统后根据登录用户的权限,系统自动设置运行环境及用户可使用的功能项。用户不会看到其没有权限的车辆,也不能操作没有权限的功能。 1.1.3 业务流程 1.1.3.1 车辆监控流程
基于labview的语音信号采集系统
电气与自动化工程学院《LabVIEW编程实训》评分表课程名称:LabVIEW编程实训 题目:基于labview的语音信号采集系统设计 班级:1601131自动化学号:160113113姓名:刘德旺 指导老师: 年月日
常熟理工学院电气与自动化工程学院《LabVIEW编程实训》技术报告题目:基于LabVIEW的语音信号采集系统设计 姓名:刘德旺 学号:160113113 班级:自动化131 指导教师:陈飞 起止日期:2016年6月20日-7月8日
LabVIEW编程实训答辩记录 自动化专业 1601131班级答辩人刘德旺 题目基于LabVIEW的语音信号采集系统设计 说明:主要记录答辩时所提的问题及答辩人对所提问题的回答
目录 1.任务书 (1) 2.基于LABVIEW的数据采集系统概述 (3) 2.1虚拟仪器概念与传统仪器概念主要区别 (3) 2.1.1LabVIEW虚拟仪器简介 (3) 2.1.2LabVIEW虚拟仪器特点 (3) 2.2 LabVIEW图形化程序的组成与特点 (4) 2.2.1前面版 (4) 2.2.2程序框图 (4) 2.2.3图标和连接器 (5) 3.语音信号采集总体设计方案与硬件配置 (6) 3.1语音信号采集系统的功能分析 (6) 3.2语音信号采集系统的总体构成 (6) 3.3语音信号采集系统的硬件配置 (6) 4.语音信号采集系统的软件设计与功能实现 (11) 4.1语音信号采集系统的软件前面板设计 (11) 4.1.1语音信号采样信息界面 (11) 4.1.2语音采集控制按钮界面 (11) 4.1.3时域波形和频域波形显示界面 (11) 4.2语音信号采集系统的软件程序框图设计 (12) 5.语音信号采集系统的运行与分析 (18) 6.收获与体会 (21) 参考文献 (23)
高速实时数字信号处理硬件技术发展概述
高速实时数字信号处理硬件技术发展概述 摘要:在过去的几年里,高速实时数字信号处理(DSP)技术取得了飞速的収展,目前单片DSP芯片的速度已经可以达到每秒80亿次定点运算(8000MIPS);其 高速度、可编程、小型化的特点将使信息处理技术迚入一个新纪元。一个完整的高速 实时数字信号处理系统包括多种功能模块,如DSP,ADC,DAC,RAM,FPGA,总线接口等技术本文的内容主要是分析高速实时数字信号处理系统的特点,构成,収展过程和系统设计中的一些问题,幵对其中的主要功能模块分别迚行了分析。最后文中介绍了一种采用自行开収的COTS产品快速构建嵌入式幵行实时信号处理系统的设计方法。 1.概述 信号处理的本质是信息的变换和提取,是将信息仍各种噪声、干扰的环境中提取出来,幵变换为一种便于为人或机器所使用的形式。仍某种意义上说,信号处理类似于”沙里淘金”的过程:它幵不能增加信息量(即不能增加金子的含量),但是可以把信息(即金子)仍各种噪声、干扰的环境中(即散落在沙子中)提取出来,变换成可以利用的形式(如金条等)。如果不迚行这样的变换,信息虽然存在,但却是无法利用的,这正如散落在沙中的金子无法直接利用一样。 高速实时信号处理是信号处理中的一个特殊分支。它的主要特点是高速处理和实时处理,被广泛应用在工业和军事的关键领域,如对雷达信号的处理、对通
信基站信号的处理等。高速实时信号处理技术除了核心的高速DSP技术外,还包括很多外围技术,如ADC,DAC等外围器件技术、系统总线技术等。 本文比较全面地介绍了各种关键技术的当前状态和収展趋势,幵介绍了目前高性能嵌入式幵行实时信号处理的技术特点和収展趋势,最后介绍了一种基于COTS产品快速构建嵌入式幵行实时信号处理系统的设计方法。 2.DSP技术 2.1 DSP的概念 DSP(digital signal processor),即数字信号处理器,是一种专用于数字信号处理的可编程芯片。它的主要特点是: ①高度的实时性,运行时间可以预测; ②Harvard体系结构,指令和数据总线分开(有别于冯·诺依曼结构); ③RISC指令集,指令时间可以预测; ④特殊的体系结构,适合于运算密集的应用场合; ⑤内部硬件乘法器,乘法运算时间短、速度快; ⑥高度的集成性,带有多种存储器接口和IO互联接口; ⑦普遍带有DMA通道控制器,保证数据传辒和计算处理幵行工作; ⑧低功耗,适合嵌入式系统应用。 DSP有多种分类方式。其中按照数据类型分类,DSP被分为定点处理器(如ADI的ADSP218x/9xBF5xx,TI的TMS320C62/C64)和浮点处理器(如ADI的SHARC/Tiger SHARC系统·TI的TMS320C67)。 雷达信号处理系统对DSP的要求很高,通常是使用32bit的高端DSP;而且浮
车辆GPS调度管理系统解决方案
×××××××× 车辆GPS调度管理系统解决方案 甘肃通服信息技术分公司 二〇一二年十月
目录 一、引言 (3) 二、需求分析 (3) 三、系统解决方案 (4) 1.系统结构 (4) 2.硬件选型及特性 (5) 四、系统主要功能 (6) 1.基本功能 (6) 1)车辆实时定位与跟踪 (6) 1)集群定位 (7) 2)紧急报警 (7) 3)历史轨迹查看及回放 (8) 4)运营数据管理 (8) 5)电子围栏和偏航报警(线路监控) (9) 6)分段限速、超速监控 (9) 7)组织及权限管理 (10) 2.专用功能 (10) 1)语音调度与通话 (10) 2)3G图像监控 (10) 五、系统先进性 (11) 1.便捷的查车方式 (11) 2.多种电子地图显示 (12) 3.便捷的二次地图开发 (13) 六、系统效应 (13) 七、售后服务 (13) 1、硬件售后服务 (13) 2、软件售后服务 (14)
一、引言 非常感谢××××××××提供给甘肃通服信息技术分公司制作通信方案的机会。能为贵单位信息化建设工作尽一份力量,我们感到非常荣幸。 在了解了贵单位的需求现状以后,我们立即组织相关部门进行了深入、细致的研究,并先后多次和贵单位业务主管部门沟通交流。现根据我们对贵单位需求的理解,结合中国通信服务甘肃公司综合信息服务的优势,我们制作了此方案,敬请贵单位领导审阅。我们相信,凭借中国通信服务甘肃公司完善的服务、科学的管理、丰富的经验以及强大的综合信息服务提供能力,我们完全有能力满足贵单位全面信息化建设服务的要求,为贵单位提供满意的解决方案和优质的持续服务。 我们对建设项目需求的理解可能有不够准确的地方,如果方案中出现不符合需求的情况,欢迎提出宝贵意见,以便改进和提高我们的工作,提供更符合您需求解决方案。 二、需求分析 随着企业经营规模的增大,内部车辆的增多,车辆管理工作变的越来越烦杂。相关管理部门会常常需要思考以下一些问题: ?要求为司机规划、指引最佳线路,减少司机走错路,减少油耗。 ?要求车辆统一管理和高效调度,提高车辆的利用率 ?要求掌握车辆实时信息,对车辆实施实时监控要 ?求杜绝驾驶员不合理用油、过桥过路费用过高 ?要求防止违章驾驶,保证行车安全 ?如何做到特种车辆实时状态监控? ?如何对服务行业车辆司乘人员如何监管? ?特殊环境下如何得到远程监控对象的位置及状态?
信号采集与回放系统
信号采集与回放系统 技术报告 电信082班084775240 周霞 (合作者:电信082班084775228 吴迪) 指导教师:倪海燕 2010-5-27
摘要:本设计通过A/D转换和D/A转换实现输入信号与输出信号的变化。通过实验箱上的模式3的ADC输入正弦波信号,设计按键选择,有3种模式分别是直接回放,单次回放,循环回放和定点回放。 关键字:信号回放模式选择 一、实验要求 1. 实现输入,存储,回放信号 2. 回放模式选择(直接回放,单次波形回放,循环回放,分段存储定点回放等) 二、总原理图 三、系统总体方案设计 根据实验要求,TLC5510A 是采样率最高为20MHz的8位并行高速ADC ,FPGA的PIO48输出信号控制ADC1的输出使能信号OE(低电平有效);PIO15为转换时钟信号CLK;AD转换结果送至PIO16~PIO23,并且同时显示在数码管1和数码管2上。ADC的模拟信号输入端在实验箱的左侧,允许输入0~5V的信号。 转换关系:DATA=255×Ain/5
数据从采集到转换结束需要两个半时钟周期 四、软件电路的设计 4.1控制器的设计 用VHDL语言编写控制器的程序,要有读写使能和模式选择。用choose[2]的四个状态分别表示直接回放,单次回放,循环回放和定点回放。 程序如下: library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_unsigned.all; entity control is port ( clk:in std_logic; --时钟 writ:in std_logic; --读写使能 en:in std_logic; --使能 choose:in std_logic_vector(1 downto 0); --模式选择 ch:in std_logic_vector(1 downto 0); --阶段选择 enout:out std_logic; --读写使能输出 adr:out std_logic_vector(9 downto 0) ); --地址 end entity control; architecture behave of control is signal count1:std_logic_vector(9 downto 0); signal count11:std_logic_vector(9 downto 0); signal count2:std_logic_vector(9 downto 0); signal count22:std_logic_vector(9 downto 0); begin process(writ,en,ch,choose) begin if(en='1')then count1<="0000000000";count11<="0000000000"; count2<="0000000000";count22<="0000000000"; elsif (clk'event and clk='1')then if(choose="01")then ---- 单次回放
GPS公共车辆跟踪调度系统设计方案
GPS 公共车辆跟踪调度系统 设计方案 GPS 车辆应用系统的构成 GPS 车辆应用系统主要由GPS 车辆跟踪调度系统和车辆导航系统两大部分组成,它们在功能上截然不同,一种是用于车辆的防盗,一种则是用于车辆的自主导航。 GPS 共车辆跟踪调度系统结构 一、通信系统 通信系统包含GPRS/GSM 实时通信模块、车载终端远程管理模块、车载终端软件无线升级模块,通信服务器负载均衡模块、智能调度模块。 应用GSM 通信技术的车载定位系统一般由三部分构成:①车载单元;②监GPS 共车辆跟 踪调度系统 通信 系统 调度 管理 系 统 GIS 系统 管理调度呼叫中心 WEB 服务系统
控中心;③GSM通信服务系统。 主要功能为: (1)防盗报警功能:当有紧急情况发生时,用户可以触发隐蔽的报警按钮,车载单元会自动将GPS接收机中的位置数据通过GSM手机的短消息功能传送给监控中心。防盗激活功能,当车辆遭遇非法入侵时自动发送报警信息至控制中心; (2)导航功能:GPS提供移动目标的准确位置、速度和方向等数据,无差分的定位精度在10m左右,差分精度为3-5m。系统可以通过调度中心进行导航,也可以在终端上存储电子地图。 (3)通话功能:车载GSM手机可进行通话,当用户离车时还可将手机取下正常使用。 (4)服务:提供一组服务按钮,当车主需要服务时按下相应按钮,由服务中心提供服务。 二、WEB服务系统 WEB服务系统把车辆地理信息在互联网上发布,供有权限的用户使用及各出租汽车公司监控本单位的车辆。其包括车辆地理信息显示、车辆资料查询、车辆身份识别。 三、GIS系统 GIS 的组成部分 从应用的角度,地理信息系统由硬件、软件、数据、人员和方法五部分组成。硬件和软件为地理信息系统建设提供环境;数据是GIS的重要内容;方法为GIS建设提供解决方案;人员是系统建设中的关键和能动性因素,直接影响和协调其它几个组成部分。 硬件主要包括计算机和网络设备,存储设备,数据输入,显示和输出的外围设备等等。 软件主要包括以下几类:操作系统软件、数据库管理软件、系统开发软件、GIS 软件,等等。 GIS软件的选型,直接影响其它软件的选择,影响系统解决方案,也影响着系统建设周期和效益。 人是GIS系统的能动部分。人员的技术水平和组织管理能力是决定系统建设成败的重要因素。系统人员按不同分工有项目经理、项目开发人员、项目数据人员、系统文档撰写和系统测试人员等。各个部分齐心协力、分工协作是GIS系统成功建设的重要保证。 四、车辆调度管理系统 GPS车辆调度管理系统
基于GPS的车辆跟踪系统的设计与实现
课程设计论文 (2011--2012年度第二学期) 名称:物理信息技术与应用课程实践 题目:基于GPS的车辆跟踪系统的设计与实现院系:物流工程系 班级: 学号: 学生姓名: 指导教师: 设计周数:2 周 成绩: 日期:2012 年6月26 日
摘要:自GPS技术的开创一来,基于GPS的各种定位追踪系统的研发数不胜数。随着人们生活的提高,大量汽车的使用给社会带来巨大交通问题,致使基于GPS的车辆定位系统在二十世纪六十年代开始列入研究课题。它的发展融合了当今空间定位技术GPS、无线通信技术GMS和地理信息系统GIS 的最新成果。而当下日趋完善的智能手机系统为车辆监控提供了更为光明的发展前景。Android平台作为时下流行的智能手机操作平台,不仅功能强大,更有开放和免费的先天优势。本文所研究的基于Android系统的GPS车辆定位系统正是将传统的课题研究与时下流行的技术相结合的应用型尝试。以手机为载体,运用谷歌地图技术将车辆的实时位置显示于手机屏幕上以实现车辆的实时定位。开发过程以Eclipse及Android虚拟机为主要工具。最终实了核心的车辆定位跟踪功能。 关键词:车辆定位系统,Android智能手机平台与系统,谷歌地图 一、引言 1.1课题意义 随着经济的高速发展和城市化进程的加快,交通运输的压力不断加剧,交通拥挤和堵塞的现象越来越普遍,严重影响了人们的生活,制约了社会的生产。如何科学的引导车辆的出行,避开拥挤路段,提高道路通行能力,是现代社会亟待解决的重要问题。与此同时,随着机动车辆的数量日益增多,许多与汽车密切相关的行业迅速发展壮大。例如,出租车,公交汽车,旅游客运,银行,医院急救,物流以及机械施工等诸多行业面临着所辖车辆机动性强,数量众多,难以管理的棘手问题。另外,有的行业对于安全性的要求很高,比如运钞车,夜间出行的出租车,运送重要物资的货车等等。如何有效的控制和管理这些车辆,对车辆进行合理的调度,提高车辆的利用效率以及保证车辆的行驶安全,已成为政府和公
用高速DSP在频域上实现LFM信号的实时脉冲压缩
摘要:时宽带宽(tb)积较小的线性调频(lfm)信号的脉冲压缩可用a100等器件构成的横 向滤波器实现;对于tb积较大的lfm信号,在时域上对其进行脉冲压缩所需的计算量和硬件 量太大。本文介绍用tms320c6201 dsp在频域上实现大tb积lfm信号的实时脉冲压缩,内容 包括海明加权、循环卷积、长数据分段迭加、软件流程图和硬件框图。实验结果表明,当雷 达重要周期为300hz时,对tb积为320的lfm信号进行脉冲压缩后最大副瓣电平为-42.3分 贝。关键词:lfm 脉冲压缩信号处理器实时信号处理匹配滤波为提高脉冲雷达或 脉冲声纳的作用距离,通常有两个途径,其一是增加发射机峰值功率;其二是加大发射脉冲 的宽度来提高平均发射功率。发射机的发射功率峰值受电源、功率放大器、功率传输通道(功 率过大,波导等器件易打火)等限制;简单增加发射脉冲的宽度,相当于降低发射信号的带 宽。为使相同时宽的脉冲增加带宽,可对发射脉冲内的载波进行线性调频;在接收端对线性 调频的回波信号再进行脉冲压缩处理。经脉冲压缩后信号所具有的大的带宽能够提高测距精 度和距离分辨力。宽脉冲内大的时宽能够提高测速精度和速度分辨力。因此脉冲压缩技术广 泛用于雷达、声纳等系统,其中以线性调频信号的应用最为广泛。1 线性调频信号的脉冲压 缩线性调频(lfm)信号是一种瞬时频率随时间呈线性变化的信号。零中频线调频信号u(t) 可表示为:u(t)=exp(jπbt2/t) -t/2<t<t/2 (1)式中,t为线性调频信号的时 宽,b为带宽。对线性调频信号的脉冲压缩处理,就是让信号通过一个与其相匹配的滤波器 实现的。与u(t)匹配的滤波器的冲激响应为:h(t)=exp(-jπbt2/t) -t/2<t<t/2 (2)u(t)经匹配滤波器压缩后的输出g(t)为:g(t)=u(t) *h(t) t<t<t (3)线 性调频信号的突出优点是匹配滤波器对回波信号的多普勒频移不敏感,即使回波信号有较大 的多普勒频移,原来的匹配滤波器仍能起到脉冲压缩的使用。这将大大简化信号处理系统。 经性调频信号经匹配滤波器后的输出脉冲g(t)具有sinc(t)函数型包络,其最大副瓣电平为 主瓣电压的13.2db。在多目标环境中,旁瓣会埋没附近较小目标的信号,引起目标丢失。为 了提高分辨多目标的能力,可以采用加权技术。设时域加权函数为w(t),则加权输出为: g(t)=u(t)*[h(t) ·w(t) ] (4)引入加权函数实质上是对信号进行失配处理。以抑制 旁瓣,其副作用是输出信号的包络主瓣降低、变宽。即旁瓣抑制是以信噪比损失及距离分辨 力变坏作为代价的。加权函数可以选择海明加权函数、余弦平方加权函数等。海明加权函数 为:w(t)=0.08+0.92·cos 2(πf/b)(5)在计算机中处理时,需要将信号离散化。当信 号时宽很大时,在时域上计算卷积耗时较大。因此改为在频域上实现lfm信号的脉冲压缩。 g(n)=u(n) ·h(n) (6)式中u(n)=fft[u(n)] (7)h(n)=fft[h(n) ·w(n)] (8)则:g(n)=ifft[g(n)] (9)在频域上lfm信号的脉冲压缩用循环卷积替代线性卷积 进行计算。假设u(n)的长度为n1,h(n)的长度为n2,g(n)的长度为n。当n<l(l为 n1+n2-1)时,g(n)中就会出现数据混叠,混叠发生在第0点到第l-n-1点,即g(n)在0 至l-n-1点为无效数据。2 lfm信号实时脉冲压缩的实现2.1 tms320c6201简介tms320c6201 (以下简称为c6201)是美国ti公司1997年推出的定点dsp芯片。高速的数据处理能力和 对外接口能力使其使用于雷达、声纳、通信、图像等实时处理系统。c6201 dsp采用甚长指 令字(vliw)结构,单指令字长32bit,8个指令组成一个指令包,总字长为256bit。芯片 内部设置了专门的指令分配模块,可以将每个256bit的指令包同时分配到8个处理单元并由 8个单元同时运行。最大处理能力可达2400mips。c6201的存储器寻址空间为32bit。外部存 储器接口包括直接同步存储器接口,可与同步动态存储器(sdram)、同步突发静态存储器(sbsram)连接,主要用于大容量、高速存储;还包括直接异步存储器接口,可与静态存储 器(sram)、只读存储器(eprom)连接,主要用于小容量数据存储和程序存储;还有直接外 部控制器接口,可与fifo寄存器连接。ti公司推出了世界上第一个效率可达70%~80%的汇 编语言级c编译器。对于高速实时应用,采用c语言和c6000线性汇编语言混合编程的方法, 能够把c语言的优点和汇编语言的高效率有机地结合在一起,代码效率达到90%以上。2.2 硬
汽车调度系统
物流车辆调度系统 【简介】需求分析物流管理的最终目标是降低成本,提高工 作效率以及服务水平,这需要物流企业能够及时准确全面的 掌握运输车辆的信息,对运输车辆实现实时监控调度。 摘要:本文提出了一种基于GPRS 的物流车辆调度系统设计原理和实现方案,简要介绍了GPRS 技术的基本知识,描述了GPRS 无线传输应用于物流行业实现方法。通过实际应用,获得了理想的效果。关键词:GPRS;DDN;物流;联网;车辆调度;调度系统; 一、背景介绍 随着信息技术的发展,物流行业正面临着激烈的市场竞争和严峻的挑战。在这种情况下,依托现有的资源优势,运用通信技术和信息技术,积极培育和发展业务,在信息领域挖掘新的利润增长点,必将成为物流实施可持续发展战略的重要手段之一。 物流公司拥有遍布全国的网点资源和人力资源优势,凭借公司的实物流、信息流、资金流合一的优势,业务范围已经深入到社会生产生活的各个领域和层面,有着众多企业无法比拟的资源优势。通过推进具有行业特色的业务,将能够开创基于现有业务的新型服务模式,为企业创造新的利润增长点;通过提供丰富的服务内容,满足广大消费者的新需求,进一步提高消费者满意度,增强物流业务的竞争力;完善
企业内部生产作业流程,降低运营成本,提高工作效率,增强物流公司的市场竞争力。 二、行业特点分析 物流管理的最终目标是降低成本,提高工作效率以及服务水平,这需要物流企业能够及时,准确,全面的掌握运输车辆的信息,对运输车辆实现实时监控调度。现代科技,通讯技术的发展,GPS/GIS 技术的成熟和GPRS无线通讯技术的广泛应用,为现代物流管理提供了强大而有效的工具。GPS/GIS/GPRS对物流企业优化资源配置,提高市场竞争力,将会起到积极的促进作用。 物流行业需求的特点是: ?业务覆盖地域广; ?车辆众多,信息量大; ?区域与线路监控要求突出; ?与货运单据配合紧密; ?对货物安全保障要求高; ?对系统响应要求灵活、及时; ?需要位置服务信息的需求多; ?数据共享程度要求高; ?需要完善车辆统一信息管理;
33无线定位及追踪系统
无线定位及追踪系统 1.系统功能简介 ?无线终端定位及追踪系统,基于Cisco业界领先的统一无线平台,在无线覆盖情况下对无线终端及贴有RFID标签的人员或物品进行定位和追踪。 ?实现仓储无线管理。 ?配有移动服务引擎的思科无线控制系统,用于实现精确的资产跟踪。 ?终端定位及追踪系统网络方案示意图如下: 2.系统先进特性 ?迅速交付服务和应用:从控制和网络平面中提取服务和应用,以便它们能各自独立发展,提升工作人员的效率。 ?管理:此移动服务引擎是各种增值服务的集成点,所有移动服务都通过与无线控制系统的集成而集中管理。 ?准确:思科无线定位及追踪系统可以利用思科无线局域网控制器和思科轻型接入
点,跟踪无线设备的物理位置,结果可以准确到几米之内。 ?无线安全和快速排障:思科无线定位设备让IT经理可以迅速、准确地发现及排除安全威胁,例如恶意接入点和设备,从而进一步加强WLAN的安全。 3.系统配置说明 ?无线定位及追踪系统(详细报价请向思科销售部门问询) -Cisco 4400系列和WiSM无线控制器和各类AP对企业进行无线覆盖; -WCS无线网管系统通过导入建筑平面图,使无线管理可视,直观的显示覆盖区域和性能,为终端定位搭建平台; -Cisco MSE移动服务引擎与思科统一无线网络和思科统一通信解决方案集成,充分利用现有企业移动投资。它所支持的各种服务,包括收集人员、事物和资 产相关环境信息的能力,能够优化业务流程。 4.系统应用领域 ?终端定位及追踪系统可以满足以下需求: -需要实现精确的资产跟踪定位,实现投资保护。 -提高员工的办事效率。 -力求改善客户满意度,尽量减少客户等待时间。 -全自动化流水线无线定位需求 ?终端定位及追踪系统可以部署到在以下行业应用系统中: -医疗业:实时病患追踪和遥测,医疗器械的定位和追踪
车辆定位及货物追踪系统(GIS)
1.1车辆定位及货物追踪系统 1.1.1系统概述 车辆定位及货物追踪系统面向中小物流企业提供对其自有车辆监控调度、货运管理,面向中小物流企业和货主提供货物跟踪支持功能,各会员企业只需购买GPS/GSM智能车载单元即可为客户提供高质量的物流状态跟踪服务。同时,实现了对政府部门运政执法车辆、应急指挥车辆等的及时监控,一方面在处理突发事件时,便于应急交通指挥工作的开展,另一方面,还将起到规交通行政执法人员执法行为、提高文明执法水平、确保交通运输安全、提升交通文明形象等作用。 车辆定位及货物追踪系统功能框架图 1.1.2功能设计 1.1. 2.1实时监控 1.车辆实时监控 车辆实时监控功能主要面向物流企业和政府部门,用户通过实时
监控功能可以掌握车辆的位置信息、车辆状态信息等。车辆实时监控功能可以有效的使运输企业监督驾驶员的驾驶行为,了解下属车辆的运行信息,同时为政府部门在处理突发紧急事件时的指挥工作提供了依据。 2.货物跟踪监控 货物实时监控功能主要面向货源单位和物流企业。用户通过实时监控功能可以掌握货物的位置信息、货物状态信息等。从而为了解货物位置、货物状态、监督运输过程、制定生产决策等提供帮助。 1.1. 2.2轨迹回放 轨迹回放功能主要面向物流企业和货主,用户通过轨迹回放可以了解了解车辆/货物历史的行驶情况,便于运输企业查看、监督下属车辆和驾驶员的工作情况,便于货源单位了解货物运输情况,监督运输企业运输过程。回放前用户可以自定义回放的电子地图,回放过程中用户可以自行调节回放速度、同时系统在明显信息中详细显示每点轨迹信息。 1.1. 2.3报警管理 报警管理功能主要面向车主、运输企业,在报警管理功能模块用户可以设定各种发出警报条件,如盗车报警、断电报警、越界报警、超速报警、温度报警等,当车辆状态超出设定围时系统自动向用户发送警报信息,如车辆位置、报警原因等,以便用户更快掌握车辆和货物当前信息,对突发状况尽快提出解决方案。